机器学习入门 - 感知器
机器学习--感知机算法原理、方法及代码实现

机器学习--感知机算法原理、⽅法及代码实现1.感知器算法原理两类线性可分的模式类:,设判别函数为:。
对样本进⾏规范化处理,即类样本全部乘以(-1),则有:感知器算法通过对已知类别的训练样本集的学习,寻找⼀个满⾜上式的权向量。
2.算法步骤(1)选择N个分属于和类的模式样本构成训练样本集{ X1, …, X N }构成增⼴向量形式,并进⾏规范化处理。
任取权向量初始值W(1),开始迭代。
迭代次数k=1。
(2)⽤全部训练样本进⾏⼀轮迭代,计算W T(k)X i的值,并修正权向量。
分两种情况,更新权向量的值: 若,分类器对第i 个模式做了错误分类,权向量校正为:,c为整的校正增量。
若,分类正确,权向量不变,。
统⼀写成:(3)分析分类结果:只要有⼀个错误分类,回到(2),直⾄对所有样本正确分类。
感知器算法是⼀种赏罚过程: 分类正确时,对权向量“赏”——这⾥⽤“不罚”,即权向量不变; 分类错误时,对权向量“罚”——对其修改,向正确的⽅向转换。
3.代码⽰例#感知机算法import numpy as npimport matplotlib.pyplot as pltX0 = np.array([[1,0],[0,1],[2,0],[2,2]])X1 = np.array([[-1,-1],[-1,0],[-2,-1],[0,-2]])#将样本数据化为增⼴向量矩阵ones = -np.ones((X0.shape[0],1))X0 = np.hstack((ones,X0))ones = -np.ones((X1.shape[0],1))X1 = np.hstack((ones,X1))#对样本进⾏规范化处理X = np.vstack((-X0,X1))plt.grid()plt.scatter(X0[:,1],X0[:,2],c = 'r',marker='o',s=500)plt.scatter(X1[:,1],X1[:,2],c = 'g',marker='*',s=500)W = np.ones((X.shape[1],1))flag = Truewhile(flag):flag = Falsefor i in range(len(X)):x = X[i,:].reshape(-1,1)if np.dot(W.T,x)<=0:W = W + xflag = Truep1=[-2.0,2.0]p2=[(W[0]+2*W[1])/W[2],(W[0]-2*W[1])/W[2]] plt.plot(p1,p2)plt.show()输出结果:。
单层感知器算法及其训练过程探究

单层感知器算法及其训练过程探究随着人工智能和机器学习技术的发展,单层感知器算法因为其简单和易于理解的特点成为了很多人学习和掌握机器学习初步知识的入门之路。
本文将介绍单层感知器算法及其训练过程探究。
一、单层感知器算法单层感知器是一种线性分类模型,也是神经网络的一种。
它通过一些列数值计算和激活函数的运用,将输入的向量映射到某个输出的标签值,用于相应的分类任务中。
单层感知器算法的基本流程是:输入向量 x 经过线性函数运算 h(x) = w*x+b 之后,再经过激活函数 g(h(x)) ,得到分类的输出 y。
其中,w 是权重,b 是偏差量。
在训练过程中,单层感知器通过反向传播算法对权重和偏差量进行不断调整,从而不断提高分类准确率。
二、单层感知器的训练过程单层感知器的训练过程可以分为以下几步:1. 准备数据准备数据是机器学习的第一步,也是单层感知器训练的必要条件。
通常,我们需要用一些已经标记好标签的数据集,输入向量 x 和对应的标签 y,作为算法的训练数据集。
2. 初始化权重和偏差量在开始训练之前,需要初始化权重 w 和偏差量 b。
通常,我们可以使用随机的小数值来初始化它们。
3. 计算误差并更新参数单层感知器的权重和偏差量通过随机初始化后,就可以开始输入训练集数据,并对其进行分类。
如果分类结果与真实标签不一致,则需要通过误差计算来调整权重和偏差。
通常,我们可以使用代价函数作为误差计算的准则,常见的代价函数有均方误差MSE 和交叉熵 CE. 通过代价函数计算出误差值,再通过反向传播算法对权重和偏差量进行更新,不断调整,直到误差值最小化。
4. 不断迭代在更新了权重和偏差量之后,需要再次用训练集测试,并根据误差值调整权重和偏差,直到误差值达到预设精度或者达到最大迭代次数停止。
三、总结单层感知器算法作为神经网络中的一种基本算法,其训练过程简单,易于理解,对于初学者来说是一种入门机器学习和神经网络的良好途径。
总之,单层感知器是机器学习和深度学习的起点,学习它可以让我们更好地理解更复杂的神经网络和机器学习算法,为未来更高级的研究打下坚实的基础。
感知器算法的基本原理与应用

感知器算法的基本原理与应用感知器算法是一种简单而有效的机器学习算法,于1957年被Frank Rosenblatt所提出。
在过去几十年里,感知器算法一直被广泛应用在识别模式,分类数据和垃圾邮件过滤等领域。
本文将会介绍感知器算法的基本原理,如何使用感知器完成模式分类,以及如何优化感知器算法。
感知器算法的基本原理感知器算法基于神经元(Perceptron)模型构建,神经元模型的基本原理是对输入信号进行加权,然后通过激活函数的计算输出结果。
通常情况下,神经元被认为是一个输入层节点,一个或多个输入是接收的,以及一个输出层。
感知器算法的核心思想是,给定一组输入和对应的输出(通常成为标签),通过多个迭代来调整模型中的权重,以最大限度地减少模型的误差,并尽可能准确地预测未知输入的输出。
感知器算法的主要流程如下:1. 初始化感知器参数,包括权重(最初为随机值)和偏置(通常为零)。
2. 对于每个输入,计算预测输出,并将预测输出与实际标签进行比较。
3. 如果预测输出与实际标签不同,则更新权重和偏置。
更新规则为$\omega_{j} \leftarrow \omega_{j} + \alpha(y-\hat{y})x_{j}$,其中$x_{j}$是输入的第$j$个特征,$\alpha$是学习率(控制权重和偏置的更新量),$y$是实际标签,而$\hat{y}$是预测输出。
4. 重复步骤2和步骤3,直到满足停止条件(例如,经过N次重复迭代后误差不再显著降低)。
如何使用感知器完成分类让我们考虑一个简单的情况:我们要学习使用感知器进行两类别(正面和负面)的文本情感分类。
我们可以将文本转换为一组数字特征,例如文本中出现特定单词的频率或数量,并将每个文本的情感作为输入,正面或负面情感被记为1或0。
我们可以将感知器视为一个二元分类器,用它来预测每个输入文本的情感值。
对于每个输入,我们计算出感知器的输出,并将其与实际情感进行比较。
如果它们没有匹配,那么我们将使用上面提到的更新规则调整每个特征的权重,重复该过程,直到达到收敛为止。
感知器神经网络
感知器神经网络感知器是一种前馈人工神经网络,是人工神经网络中的一种典型结构。
感知器具有分层结构,信息从输入层进入网络,逐层向前传递至输出层。
根据感知器神经元变换函数、隐层数以及权值调整规则的不同,可以形成具有各种功能特点的人工神经网络。
本节将介绍单层感知器和多层感知器的工作原理。
5.3.1单层感知器1958年,美国心理学家Frank Rosenblatt 提出一种具有单层计算单元的神经网络,称为Perceptron ,即感知器。
感知器是模拟人的视觉接受环境信息,并由神经冲动进行信息传递的层次型神经网络。
感知器研究中首次提出了自组织、自学习的思想,而且对所能解决的问题存在着收敛算法,并能从数学上严格证明,因而对神经网络研究起了重要推动作用。
单层感知器的结构与功能都非常简单,以至于在解决实际问题时很少采用,但由于它在神经网络研究中具有重要意义,是研究其它网络的基础,而且较易学习和理解,适合于作为学习神经网络的起点。
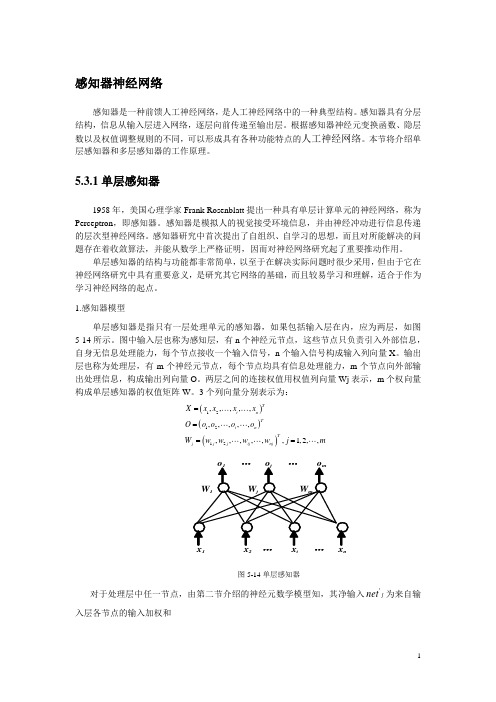
1.感知器模型单层感知器是指只有一层处理单元的感知器,如果包括输入层在内,应为两层,如图5-14所示。
图中输入层也称为感知层,有n 个神经元节点,这些节点只负责引入外部信息,自身无信息处理能力,每个节点接收一个输入信号,n 个输入信号构成输入列向量X 。
输出层也称为处理层,有m 个神经元节点,每个节点均具有信息处理能力,m 个节点向外部输出处理信息,构成输出列向量O 。
两层之间的连接权值用权值列向量Wj 表示,m 个权向量构成单层感知器的权值矩阵W 。
3个列向量分别表示为:()()()121212,,,,,,,,,,,,,,,,1,2,,T i n Ti n Tj j j ij nj X x x x x O o o o o W w w w w j m====图5-14单层感知器对于处理层中任一节点,由第二节介绍的神经元数学模型知,其净输入j net '为来自输入层各节点的输入加权和∑==ni i ij j x w net 1'(5-26)输出o j 为节点净输入与阈值之差的函数,离散型单计算层感知器的转移函数一般采用符号函数。
感知器算法
y = f (∑ wi xi − θ )
i =1
d
而且f为一阶跃函数, 而且 为一阶跃函数,即: 为一阶跃函数
d 1, ∑ wi xi − θ ≥ 0 i =1 y = f ( x) = = sgn( w0T x − θ ) d −1, w x − θ < 0 ∑ i i i =1
四、感知器训练算法在多类问题中的应用 就第二章中的第三种情况为例说明) (就第二章中的第三种情况为例说明) 判决规则:对于c种类型 存在k个判决函 种类型, 判决规则:对于 种类型,存在 个判决函 数 d j ( x)( j = 1, 2,⋯, k ) ,若 di ( x) > d j ( x)( j = 1, 2,⋯ , k , j ≠ i) , x ∈ ωi 则判: 则判: 假设k=c, 多类问题的感知器算法的步骤如下: 多类问题的感知器算法的步骤如下: 假设 (1) 赋给初值: 赋给初值: 赋初值,选择正常数c, 给 Wi 赋初值,选择正常数 把训练样本 变成增广型, 变成增广型,k=0; x (2) 输入训练样本 xk,k ∈{x1 , x2 ,⋯, xn },假定 x ∈ ωi ;
训练样本
x1 x2 x3 x4 x1 x2 x3 x4 x1 x2 x3 x4 x1 x2 x3 x4 1011 0111 1101 0101 1011 0111 1101 0101 1011 0111 1101 0101 1011 0111 1101 0101
W(K)Tx
+ + + 0 0 + 0 + + + -
(3) 计算 个判决函数值: 计算c个判决函数值 个判决函数值:
di ( xk ) = [Wi (k )]T xk , i = 1, 2,⋯ , c
感知器准则例题
感知器准则例题感知器准则是一种在模式识别和机器学习中常用的准则,它主要用于二分类问题。
下面是一个简单的感知器准则的例子:假设我们有一个简单的二分类问题,其中特征为 (x),类别为(y)。
对于这个分类问题,我们定义一个线性分类器 (f(x) = w \cdot x + b),其中 (w) 是权重向量,(b) 是偏置项。
现在,我们有一个训练数据集 (D = {(x_1, y_1), (x_2, y_2), \ldots, (x_n, y_n)}),其中 (y_i = \pm 1) 表示类别。
我们的目标是找到一个分类器 (f(x)),使得对于训练数据集中的所有样本,(f(x)) 的输出与 (y) 的值一致。
感知器准则的基本思想是:如果存在一个分类器 (f(x)) 能够将训练数据集中的所有样本正确分类,那么这个分类器就是一个好的分类器。
为了找到这样的分类器,我们可以使用感知器算法。
该算法的基本步骤如下:1.初始化权重向量 (w) 和偏置项 (b) 为随机值。
2.对于每个样本 ((x_i, y_i)) 在训练数据集 (D) 中,计算(f(x_i)) 的值。
3.如果 (y_i f(x_i) > 0)(即类别和预测值一致),则不更新权重向量和偏置项。
4.如果 (y_i f(x_i) \leq 0)(即类别和预测值不一致),则根据规则更新权重向量和偏置项。
5.重复步骤 2-4,直到训练数据集中的所有样本都被正确分类,或者达到预设的迭代次数。
感知器准则的优点是简单、易于实现和收敛速度快。
然而,它也有一些限制,例如对非线性问题可能无法找到全局最优解,并且对噪声和异常值敏感。
为了解决这些问题,研究者们提出了许多改进算法,如支持向量机、神经网络等。
机器学习技术中的多层感知器与自编码器的比较
机器学习技术中的多层感知器与自编码器的比较机器学习技术在过去几十年中取得了令人瞩目的进展,在各个领域都得到了广泛的应用。
其中,多层感知器(Multilayer Perceptron, MLP)和自编码器(Autoencoder)是两种常见的神经网络模型。
本文将对这两种技术进行比较,探讨它们在机器学习中的应用和优势。
首先,我们来了解一下多层感知器和自编码器的基本原理。
多层感知器是一种前向神经网络,由输入层、若干个隐藏层和输出层组成。
每个神经元与下一层神经元之间有权重连接,通过反向传播算法进行训练,实现模型的参数优化。
自编码器也是一种神经网络模型,其中包含一个编码器和一个解码器。
编码器将输入数据映射到低维空间,解码器将低维空间的表示映射回原始空间。
多层感知器和自编码器在应用中有一些共同点,比如它们都可以用于分类和降维任务。
然而,它们也存在一些不同之处。
首先,在特征学习方面,自编码器在无监督学习中起到了关键作用。
它通过学习数据的压缩表示,可以有效地提取输入数据中的有用特征。
自编码器的目标是最小化输入和重构之间的差异,这使得它在无标签数据上的特征学习具有很好的性能。
相比之下,多层感知器通常需要大量有标签数据进行训练,因为它是一个有监督学习模型。
它通过反向传播算法来更新权重,对于分类等任务非常有效。
其次,在泛化能力方面,多层感知器往往表现更好。
多层感知器拥有较强的非线性建模能力,可以处理复杂的输入输出关系。
而自编码器在重构数据方面表现出色,但在处理非线性数据分布时可能表现不佳。
这是因为自编码器的目标是最小化重构误差,而不是优化分类准确性。
另外,在可解释性和可视化方面,自编码器有一定的优势。
它可以学习数据的低维表示,这些表示在一定程度上保留了原始数据的结构信息。
这使得我们可以通过可视化学习到的低维表示来理解模型对数据的理解。
而多层感知器由于其复杂的结构,往往难以解释和可视化。
最后,我们来讨论一下这两种模型的应用领域。
感知器和ADLINE网络
感知器和ADLINE 网络一、感知器和ADLINE 网络的工作原理1.感知器工作原理感知器由MP 模型加上学习算法构成,用于分类,是一个线性分类器。
可以分为单神经元感知器和多神经元感知器,单神经元感知器用于两类分类,多神经元感知器用于多类分类。
图1 单神经元感知器 图2 多神经元感知器 以单神经元感知器为例,设{}11,t x ,{}22,t x ,…,{}Q Q t ,x 是线性可分两类训练样本, 其中,n i R ∈x 为感知器的输入,1i t =或0为对应于i x 的目标输出。
感知器的原理是模拟人的神经元工作原理,先将带有权重的输入n i R ∈x 进行线性加和,接着阈值处理,最后通过一个非线性函数得到对应于i x 的实际输出i y ,公式表示为:实际输出:()1n T i i i y f w x f θθ=⎛⎫=-=- ⎪⎝⎭∑w x ,()1, 00, if x f x otherwise≥⎧=⎨⎩ ,θw 分别为权值和阈值。
运用感知器进行分类,实际上就是求解感知器的权值和阈值,θw ,使()T i i i y f t θ=-=w x ,其中f 为硬限幅函数。
而感知器的学习规则为:(1)()()()(1)()()()()()k k e k k k k e k e k t k y k θθ+=+⎧⎪+=-⎨⎪=-⎩w w x其中()()[]()()()()()()()0(0)1,1T t k k y k f k k k k f θθ⎧⎪⎪=-⎨⎪-⎪⎩x w x x w 是的目标输出为的实际输出,为硬限幅函数初值,取较小的随机数,如在中随机选取, 为了加速算法的收敛,可以使用带步长2)(1 ≤≤αα的感知器学习算法:(1)()()()(1)()()()()()k k e k k k k e k e k t k y k αθθα+=+⎧⎪+=-⎨⎪=-⎩w w x 2.ADLINE 网络工作原理ADALINE 网络,即自适应线性神经元,它与感知器不同之处在于它给出了MP 神经元模型的另一种学习算法:LMS 算法,即极小化均方误差法,又称随机梯度法。
机器学习-单层感知器不能实现异或运算的原因
机器学习-单层感知器不能实现异或运算的原因模拟逻辑运算时,感知器的公式是这样的:
y(x1,x2)=f(ω1∗x1+ω2∗x2−θ)
其中x是输⼊的值只能取0或1
ω是对应的权值
θ是偏移量
y是输出,y>=0为真,⼩于0为假
也就是说,这个感知器通过学习ω1,ω2,θ的值来学习逻辑运算。
如果我们要这个感知器进⾏异或运算,就需要它在x1,x2相同时y⼩于0,不相同时⼤于等于0;
也就是符合以下⽅程组:
ω1+ω2−θ<0
ω1+0−θ≥0
0+0−θ<0
0+ω2−θ≥0
整理得到:
ω2 ≥ θ
0 < θ
ω1 ≥ θ
ω1+ω2<0
再整理:
0 > ω1+ω2 ≥ 2θ > 0
很明显这个式⼦不成⽴,ω1+ω2和θ都不能即⼤于0⼜⼩于0
所以这个函数是不能模拟异或运算的,那么采⽤这个函数的感知器⾃然也不能模拟异或运算。
Processing math: 100%。
感知机的基本原理
感知机的基本原理感知机是一种二分类的线性分类模型,它的基本原理是通过学习一组权重和偏差参数,将输入的数据点分为两个类别。
它是机器学习中最简单和最基础的模型之一,也是神经网络的起源之一。
感知机的原理可以概括为以下几个步骤:1. 数据表示:感知机的输入是一组特征向量x,每个特征有一个对应的权重w。
特征向量x可以表示为x=(x1, x2, ..., xn),对应的权重向量w可以表示为w=(w1, w2, ..., wn)。
每个特征向量都有一个对应的类别标签y,y的取值为1或-1,表示两个类别。
2. 线性模型:感知机的模型假设数据点可以通过一个超平面来进行划分,这个超平面可以表示为wx+b=0,其中w是权重向量,b是偏差参数。
对于超平面上方的点,其类别标签为1;对于超平面下方的点,其类别标签为-1。
3. 激活函数:感知机使用了一个激活函数来判断数据点的类别。
常用的激活函数是符号函数,它的定义为:f(x) = {1, x >= 0-1, x < 0}激活函数返回的值决定了数据点的类别。
4. 模型训练:感知机的训练过程是通过迭代来调整权重和偏差参数,使得感知机能够正确分类数据点。
假设有N个数据点,每个数据点的特征向量表示为xi,类别标签表示为yi。
对于每个数据点,计算其激活函数的输出值f(wx+b)。
如果输出值与真实的类别标签不一致,即f(wx+b)与yi异号,那么就需要更新权重和偏差参数。
更新规则如下:w = w + η * yi * xib = b + η * yi其中η是学习率,用来控制权重和偏差参数的更新步长。
学习率越大,更新的步长越大;学习率越小,更新的步长越小。
5. 模型预测:经过训练后,感知机可以用来预测新的数据点的类别。
对于一个新的数据点x,计算其激活函数的输出值f(wx+b)。
如果输出值大于等于0,则预测为类别1;如果输出值小于0,则预测为类别-1。
感知机的基本原理就是通过学习一组权重和偏差参数,将输入的数据点分为两个类别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器学习入门- 感知器(PERCEPTRON)
POSTED IN 学术_STUDY, 机器学习
本文是基于马里兰大学教授Hal Dame III(Blogger)课程内容的笔记。
感知器(Perceptron)这个词会成为Machine Learning的重要概念之一,是由于先辈们对于生物神经学科的深刻理解和融会贯通。
对于神经(neuron)我们有一个简单的抽象:每个神经元是与其他神经元连结在一起的,一个神经元会受到多个其他神经元状态的冲击,并由此决定自身是否激发。
(如下图)
Neuron Model (From Wikipedia)
这玩意儿仔细想起来可以为我们解决很多问题,尤其是使用决策树和KNN算法时解决不了的那些问题:
∙决策树只使用了一小部分知识来得到问题的答案,这造成了一定程度上的资源浪费。
∙KNN对待数据的每个特征值都是一样的,这也是个大问题。
比如一组数据包含100种特征值,而只有其中的一两种是起最重要作用的话,其他的特征值就变成了阻碍我们找到最好答案的噪声(Noise)。
根据神经元模型,我们可以设计这样一种算法。
对于每种输入值(1 - D),我们计算一个权重。
当前神经元的总激发值(a)就等于每种输入值(x)乘以权重(w)之和。
neuron sum
我们还可以推导出以下几条规则:
∙如果当前神经元的某个输入值权重为零,则当前神经元激发与否与这个输入值无关∙如果某个输入值的权重为正,它对于当前神经元的激发值a 产生正影响。
反之,如果权重为负,则它对激发值产生负影响。
接下来我们要将偏移量(bias)的概念加入这个算法。
有时我们希望我们的神经元激发量a 超过某一个临界值时再激发。
在这种情况下,我们需要用到偏移量b。
neuron sum with bias
偏移量b 虽然只是附在式子后面的一个常数,但是它改变了几件事情:
∙它定义了神经元的激发临界值
∙在空间上,它对决策边界(decision boundary) 有平移作用,就像常数作用在一次或二次函数上的效果。
这个问题我们稍后再讨论。
在了解了神经元模型的基本思路之后,我们来仔细探讨一下感知器算法的具体内容。
感知器算法虽然也是二维分类器(Binary Classifier),但它与我们所知道的决策树算法和KNN都不太一样。
主要区别在于:
∙感知器算法是一种所谓“错误驱动(error-driven)”的算法。
当我们训练这个算法时,只要输出值是正确的,这个算法就不会进行任何数据的调整。
反之,当输出值与实际值异号,这个算法就会自动调整参数的比重。
∙感知器算法是实时(online)的。
它逐一处理每一条数据,而不是进行批处理。
perceptron algorithms by Hal Dame III
感知器算法实际上是在不断“猜测”正确的权重和偏移量:
∙首先,感知器算法将所有输入值的权重预设为0。
这意味着,输入值预设为对结果不产生任何影响。
同时,偏移量也被预设为0。
∙我们使用参数MaxIter。
这个参数是整个算法中唯一一个超参数(hyper-parameter)。
这个超参数表示当我们一直无法找到准确答案时,我们要最多对权重和偏移量进行几次优化。
∙在算法PerceptronTrain第5行,我们用之前提到的加法公式计算出当前激发值a。
由于这个简单的感知器算法只可以产生二维结果,我们只检查激发值a的符号是否与实际值同号(第6行)。
如果同号,这意味着算法为当前数据的输入值找到了合适的权重和偏移量,算法结束。
∙如果激发值与实际值异号,感知器算法就要进行自调节的过程(第7, 8行)。
自调节过程分成两步:
1. 对于每种输入值的权重w,我们根据标准值y的符号将其增大或减少x。
这是基于:
activation self-adjust
2. 增大或减小一点偏移量b。
再说一下MaxIter这个唯一的超参数。
如果我们将MaxIter调到很大,这意味着我们会将每一条训练数据(Training data)用到极致。
俗话说“物极必反”,训练过度(over-fitting)也不是什么好事,在实际应用过程中可能会由于缺少变通性而导致实际测试结果不尽如人意。
而如果我们将MaxIter调到很低,比如1,可能又会导致训练不足(under-fitting)。
接下来我们从空间的角度形象的来研究一下感知器算法。
所谓感知器算法,其实是在数据空间中找一个边界(boundary),使得落在边界两边的数据点分别为正值或负值。
decision boundary sample
换句话说,这个边界代表的是具有激发值a为0的点的集合。
先前我们提到偏移量b 这个概念。
为了由浅入深,我们先不考虑这个值对图像造成的影响,或者说b = 0的情况。
当b = 0或b 不存在时,我们的激发值a 可以由之前讨论过的下面这个式子求出:
activation
如果对线性代数有一些了解的话,可以想到,这个式子其实可以写作:
a = w · x (向量w <点乘>向量x)
回顾一下点乘的概念: 两个互相垂直的向量的点积总是零。
若a和b都是单位向量(长度为1),它们的点积就是它们的夹角的余弦。
所以,我们所说的边界,其实就是在空间中与w向量垂直的线或平面。
simple decision boundary
如上图所示,B是垂直于w <1, 1>的直线,也是这个平面上数据的边界。
因为只有w的方向对求出边界比较重要,我们一般用单位向量来标记w的方向。
了解完边界的基本概念后,我们来引入偏移量这个值。
这个值的作用是非常简单的。
上面我们所说的边界将正负两种激发值划分开来。
偏离量b 这个值可以帮我们沿着w向量的方向来移动这个边界:
∙如果偏移量b 是正数,我们的边界将沿着w向量的反方向平移。
这表示有更多的激发值a 被分类为正值。
∙反之,如果偏移量b是负数,边界将沿着w向量所指方向移动。
这表示有更多的激发值a 被分类成负值。