机械优化设计作业——梯度法求解
机械优化设计 优化设计中的几个问题

144 4 x1 4 4 x 2
令 x1 12x1
11
x2 2x2
机械优化设计
1 f x x x x1 x2 x1 3
2 1 2 2
x2
T
可将Hession矩阵的主对角线元素全部化为1.
1 x1* x1 *, 12 1 x2 * x2 * 2
③ 提高运行的稳定性; 的准确性。 原则:不能改变约束的性质。
6
④ 提高运行解
机械优化设计
1. 设计变量应取相同的数量级 设计变量常存在量级差异: 模数:1-10毫米; 齿轮齿数:12-100多;杆长:几百—几 千毫米. 这在一维方法中选取初始进退距产生了困难. 改进办法: 将设计变量全部无量纲化和规格化. (1)用初始点的各分量进行标度
gu ( X ) 0
ku gu ( X ) 0
0 [ ]
ku 为正整数
(2)将约束条件规格化 例1 例2
[ ] g ( X ) 1
g ( X ) 0,1
a xi a xi b(b 0) 1 b b
xi a g2 ( X ) 0 b b
( 0) ˆ x xi xi ,i 1,2,...,n i
(2) 通过设计变量的变化范围进行标度 当有 xid xi xig ,i 1, 2,..., n xi xid ˆi g , 作变换 x n d i 1, 2,..., xi xi
ˆ i 的值在(0--1)变化. 这样可使 x 其反变换公式为
可自动满足.
10
机械优化设计
4. 目标函数的尺度变换 对于二次函数, 若Hession矩阵的主对角线元素的大 小很悬殊, 则其等值线是一族扁平的椭圆. 利用梯度法和 共轭方向法求解时有困难—稍有计算误差,搜索方向便有 较大的偏离. 办法:通过变换,使Hession矩阵的主对角线元素变 为相同值.
机械优化设计--现代优化计算方法

0101 0011 0101 1101
交配 交配
N1’: 0 1 1 1 N2’: 1 0 1 0 N3’: 0 1 0 0 N4’: 1 0 1 0
0 1 1 1 = 14 0 0 0 1 = 11 0 1 0 1 =9 1 1 0 1 = 23
通过分别交换基因,实现了交配,得到了4个新个体N1’、 N2’、 N3’和N4’ 。 若对某个个体(例如N2’ )进行基因变异(1→0),可得N2”: 0 0 1 0 0 0 0 1 (=3)
四.算法实现的几个技术问题 —— 新状态产生函数 genete (x(k))
基本要求:应保证所产生的候选解可以遍及整个解域。
一般形式:
xi'
x(k) i
i
1, 2,
, n)
η为摄动幅度系数;ε为服从某种随机分布的变动量
例:已知各变量的变动范围 xiL xi xiU i 1, 2, , n)
二. 基本思想:
状态 迁移准则( Metropolis 抽样稳定性条件):
exp
Ei
Ej kt
random 0,1
若新状态 j 的能量满足条件,则被用 来替代原状态 i。 高温下,接受能量差较大的新状态; 低温下,只接受能量差较小的新状态。
基本思想:
由某一较高的初始温度开始,利用上式在解域内随机搜索采 样,随着温度不断降低,使系统的能量达到最低状态,即相当于 能量函数的全局最优解。
§6.4 遗传优化算法
二. 基本思想:
例6-1 用遗传算法求min f (x1,x2)= x1 + x2 ,当x1和x2为整数时的整数解,且 0 x1和x2 15
机械优化设计
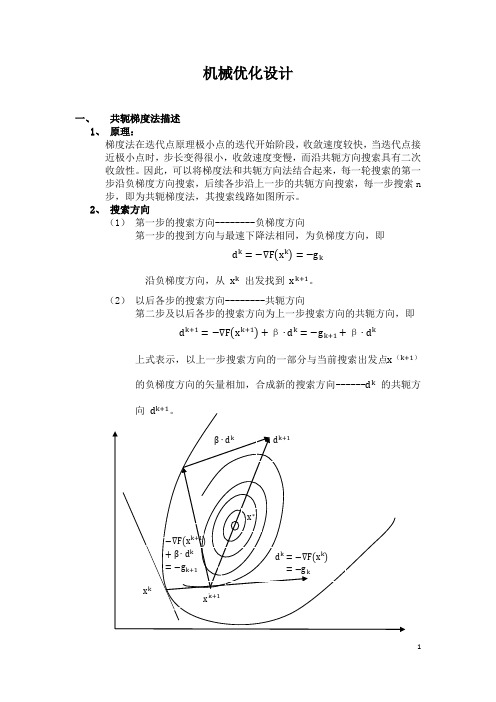
机械优化设计一、共轭梯度法描述1、原理:梯度法在迭代点原理极小点的迭代开始阶段,收敛速度较快,当迭代点接近极小点时,步长变得很小,收敛速度变慢,而沿共轭方向搜索具有二次收敛性。
因此,可以将梯度法和共轭方向法结合起来,每一轮搜索的第一步沿负梯度方向搜索,后续各步沿上一步的共轭方向搜索,每一步搜索n 步,即为共轭梯度法,其搜索线路如图所示。
2、搜索方向(1)第一步的搜索方向--------负梯度方向第一步的搜到方向与最速下降法相同,为负梯度方向,即d k=−∇F(x k)=−g k沿负梯度方向,从x k出发找到x k+1。
(2)以后各步的搜索方向--------共轭方向第二步及以后各步的搜索方向为上一步搜索方向的共轭方向,即d k+1=−∇F(x k+1)+β∙d k=−g k+1+β∙d k上式表示,以上一步搜索方向的一部分与当前搜索出发点x(k+1)的负梯度方向的矢量相加,合成新的搜索方向------d k的共轭方二、共轭梯度法的算法①任选初始点x0,给定收敛精度ε和维数n。
②令k←0,求迭代初始点x0的梯度g k;g k=∇F(x k)取第一次搜索的方向d0为初始点的负梯度,即d k=−g k。
③进行一维搜索,求最佳步长αk并求出新点min f(x k+αk d k)→αkx k+1=x k+αk d k④计算x k+1点的梯度g k+1=∇F(x k+1)⑤收敛检查满足条件‖∇F(x k+1)‖<ε则:x∗=x k,计算结束。
否则,继续下一步。
⑥判断k+1是否等于n,若k+1=n,则令x0←x k+1,转步骤②;若k+1<n,则继续下一步。
⑦计算β=‖g k+1‖2‖g k‖2⑧确定下一步搜索方向d k+1=−g k+1+β∙d k 令: k←k+1,返回步骤③。
三、共轭梯度法程序图由以上计算过程可画出共轭梯度法的程序图,便于以后编写MATLAB程序或C语言四、 共轭梯度例题例:求下列目标函数f (x )=x 12+2x 22−4x 1−2x 1x 2的极小值及在极小值处的极小点。
优化设计之梯度法

优化设计之梯度法梯度法是一种常用的优化算法,可用于求解函数的最小值或最大值。
它的基本思想是通过迭代的方式,不断沿着函数的负梯度方向更新参数,从而逐步逼近最优解。
然而,在实际应用中,梯度法可能存在一些问题,例如收敛速度慢、容易陷入局部最优等。
因此,我们可以对梯度法进行优化,以提高算法的性能。
首先,我们可以考虑使用更快速的收敛速度。
传统的梯度法每次迭代都需要计算函数的梯度,然后更新参数。
但是,这种方式在参数空间较大时,计算量较大。
因此,我们可以尝试使用近似梯度的方法来加速算法。
例如,可以使用随机梯度下降法(SGD)或者批量随机梯度下降法(mini-batch SGD),这些方法每次只选择部分样本来计算梯度,从而减少计算量。
此外,通过合理设置学习率和迭代次数,也可以提高算法的收敛速度。
其次,我们可以考虑使用更稳定的梯度下降方法。
梯度法容易陷入局部最优的问题,因为仅通过当前位置的梯度信息进行参数更新。
为了解决这个问题,可以尝试使用动量法(Momentum)、Adam等算法。
这些算法在更新参数时,除了使用当前的梯度信息,还考虑了之前多个迭代的梯度信息,从而使得参数更新更稳定,更容易逃离局部最优。
此外,我们可以考虑使用自适应学习率的方法。
传统的梯度法中,学习率是一个固定的参数,需要人为设置。
但是,在实际应用中,梯度的大小可能会随着参数变化而变化。
因此,我们可以使用自适应学习率的方法,例如Adagrad、Adam等。
这些方法能够根据梯度的大小自动调整学习率,从而更加准确地收敛到最优解。
此外,我们还可以通过正则化方法进一步优化梯度法。
正则化方法可以有效地防止过拟合问题,提高模型的泛化能力。
在梯度法中,可以使用L1正则化、L2正则化等方法,通过在损失函数中增加正则项,从而限制模型的参数范围,减少过拟合的风险。
最后,我们可以考虑使用并行计算的方法来加速梯度法。
梯度法的每次迭代都需要计算函数的梯度,这是一个计算密集型的任务。
(完整版)机械优化设计习题参考答案孙靖民第四版机械优化设计
2.黄金分割法(0.618法)
原理:提高搜索效率:1)每次只插一个值,利用一个前次的插值;2)每次的缩短率λ相同。左右对称。
程序:p52
(四)插值方法
1.抛物线法
原理:任意插3点:
算得: ; ;
要求:
设函数 用经过3点的抛物线 代替,有
解线代数方程
解得:
程序框图p57
网格法 ,缩小区间,继续搜索。
Monte Carlo方法 , ,随机数。
比较各次得到的 得解
遗传算法(专题)
(二)区间消去法(凸函数)
1.搜索区间的确定:高—低--高( )则区间内有极值。
2.区间消去法原理:在区间[a, b]内插两个点a1, b1保留有极值点区间,消去多余区间。
缩短率:
(三)0.618法
可行方向—约束允许的、函数减小的方向。(图)约束边界的切线与函数等高线的切线方向形成的区域。
数学模型
用内点法或混合法,取 ,
直接方法
(一)随机方向法
1.在可行域产生一个初始点 ,因 (约束),则
--(0,1)的随机数。
2.找k个随机方向,每个方向有n个方向余弦,要产生kn个随机数 , , ,随机方向的单位向量为
3.取一试验步长 ,计算每个方向的最优点
4.找出可行域中的最好点 得搜索方向 。以 为起点, 为搜索方向得 。最优点必须在可行域内或边界上,为此要逐步增加步长。
得
穷举下去得递推公式
3.算例
p73
4.框图p72
5.特点
作业:1. 2.
(六)变尺度法
1.引言
坐标变换
二次函数
令 为尺度变换矩阵
梯度法求解无约束优化问题

梯度法求解无约束优化问题梯度法是一种常用的无约束优化算法,用于求解目标函数的最小值。
该方法基于目标函数在当前点的梯度方向进行迭代,直到达到最小值或满足停止条件。
下面将从算法原理、步骤、优缺点等方面介绍梯度法求解无约束优化问题。
一、算法原理梯度法是一种基于一阶导数信息的优化算法,其基本思想是在当前点沿着目标函数的梯度方向进行迭代,以期望能够找到函数的最小值。
在梯度法中,每次迭代的步长和方向都是由目标函数在当前点的梯度方向决定的。
二、步骤1. 初始化:选择一个初始点$x_0$,设置迭代次数$k=0$。
2. 计算梯度:计算目标函数在当前点$x_k$的梯度$\nabla f(x_k)$。
3. 更新变量:根据梯度方向和步长更新变量$x_{k+1}=x_k-\alpha_k\nabla f(x_k)$,其中$\alpha_k$是步长,可以通过线性搜索或其他方法确定。
4. 判断停止条件:如果满足停止条件,算法结束;否则,令$k=k+1$,返回步骤2。
三、优缺点1. 优点:梯度法是一种简单、易于实现的优化算法,适用于大部分的连续可导函数。
2. 缺点:梯度法存在局部最优解的问题,容易陷入局部最优解而无法找到全局最优解。
此外,如果步长选择不当,可能会导致算法收敛速度慢或不收敛。
四、应用梯度法广泛应用于机器学习、深度学习、信号处理、图像处理等领域。
例如,在机器学习中,梯度法常用于求解线性回归、逻辑回归、神经网络等模型的参数。
总之,梯度法是一种常用的无约束优化算法,其基本思想是在当前点沿着目标函数的梯度方向进行迭代,以期望能够找到函数的最小值。
该算法简单易用,但存在局部最优解和步长选择不当等问题,需要根据具体问题进行调整和优化。
机械优化设计(1)复习资料

欢迎共阅一、 填空题1. 用最速下降法求()()2211f x =100)1x x -+-(x 最优解时,设()[]00.5,0.5T x =-,第一步迭代的搜索方向为______。
2. 机械优化设计采用数学的规划法,其核心一是最佳步长,二是搜索方向。
3. 当优化问题是凸规划的情况下,在任何局部最优解就是全域最优解。
4. 应用外推法来确定搜索区间时,最后得到的三点,即为搜索区间的始点,中间点和终,近位置。
.将函数f(X)=x 12+x 22-x 1x 2-10x 1-4x 2+60表示成C X B HX X T T ++21的形式 [][]604-10-21-1-221212121+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡x x x x x x 。
15. 存在矩阵H ,向量1d ,2d ,当满足d 1THd 2=0向量1d 和向量2d 是关于H 共轭方向。
16. 采用外点法求约束优化问题时,将约束优化问题转化为外点形式时引入的惩罚因子r数列,具有__单调递增___特点。
17. 采用数学规划法求解多元函数极值点时,根据迭代公式需要进行一维搜索,即求最佳步长。
18. 对于一维搜索,搜索区间为[],a b ,中间插入两个点1a ,1b ,11a b <,计算出()()11f a f b <,则缩短后的搜索区间为[]1,a b 。
3. 内点惩罚函数用于求解____B___优化问题。
4. 拉格朗日乘子法师求解等式约束优化问题的一种经典法,它是一种__D____。
5. 对于一维搜索,搜索区间为[],a b ,中间插入两个点1a ,1b ,11a b <,计算出()()11f a f b <,则缩短后的搜索区间为____D____。
6. ____D____不是优化设计问题数学模型的基本要素。
7. 变尺度发的迭代公式为()1k k k k k x x a H f x +=-∇,下列不属于k H 必须满足的条件是___C______。
梯度求解方法
梯度求解方法梯度求解方法是一种常用的优化算法,用于求解函数的极值点。
在机器学习和深度学习中,梯度求解方法被广泛应用于模型训练和参数优化过程中。
本文将介绍梯度求解方法的原理和常用的算法,以及其在实际应用中的一些注意事项。
一、梯度的概念在数学中,梯度是一个向量,表示函数在某一点上的变化率最大的方向。
对于多元函数而言,梯度是一个向量,其每个分量分别对应函数在每个自变量上的偏导数。
梯度的方向指向函数在某一点上变化最快的方向,而梯度的模表示函数在该点上的变化率。
二、梯度下降法梯度下降法是一种基于梯度的优化算法,用于求解函数的极小值点。
其基本思想是从一个初始点开始,沿着梯度的反方向迭代更新自变量,直到达到收敛条件或迭代次数达到上限。
具体来说,梯度下降法的更新规则如下:1. 初始化自变量的初始值;2. 计算当前点的梯度;3. 根据梯度的反方向更新自变量;4. 重复步骤2和3,直到达到收敛条件或迭代次数达到上限。
在梯度下降法中,学习率是一个重要的超参数,它控制了自变量在每次迭代中的更新幅度。
学习率过大可能导致震荡或发散,学习率过小可能导致收敛速度过慢。
三、常用的梯度下降算法1. 批量梯度下降法(Batch Gradient Descent,BGD):在每次迭代中,BGD使用全部训练样本计算梯度,并更新自变量。
BGD的优点是每次迭代都朝着全局最优解的方向前进,但计算梯度的代价较高。
2. 随机梯度下降法(Stochastic Gradient Descent,SGD):在每次迭代中,SGD使用一个样本计算梯度,并更新自变量。
SGD的优点是计算梯度的代价较低,但由于每次迭代只使用一个样本,更新方向可能不够准确。
3. 小批量梯度下降法(Mini-batch Gradient Descent):在每次迭代中,Mini-batch GD使用一小批样本计算梯度,并更新自变量。
这种方法综合了BGD和SGD的优点,既可以保证较准确的更新方向,又能降低计算梯度的代价。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
梯 度 法 求 最 优 解 问 题
姓 名:李刚 学号:2016210309
1、所求问题
用梯度法求目标函数121222125.05.1)(x x x x x x F --+=的无约束最优解,已知初始点
T X ]4,2[)0(-=,02.0=ε或002.0=ε
2、Matlab 编程实现
建立了一个Stair(e).m 的子函数来求解,e 为函数的输入变量,即问题中的ε。
只需要在Matlab “命令行窗口”去调用此函数即可,用02.0=ε或002.0=ε去代替Stair(e).m 函数中的输入变量e 即可。
程序源码:
function z =Stair(e)
%输入变量e 来代替求解精度问题,方便求解不同静精度问题
syms x1 x2 a
f=1.5*x1^2+0.5*x2^2-x1*x2-2*x1; %目标函数
dx1=diff(f,x1); %对x1求偏导
dx2=diff(f,x2); %对x2求偏导
g=[dx1,dx2]; %梯度
X=[x1,x2]; %建立坐标变量
X0=[-2,4]; %初始点坐标
g0=subs(g,X,X0); %subs 函数,用X0代替g 函数中的X G=norm(g0); %梯度的模
k=0; %迭代次数变量
F=subs(f,X,X0); %subs 函数,用X0代替f 函数中的X F=double(F); %数据类型转换
fprintf('迭代次数k=%d ;',k);
fprintf('坐标值x1=%5.7f ',X0(1));
fprintf('x2=%5.7f ;',X0(2));
%fprintf('坐标值 X=%d %d\n',X0);
fprintf('函数值F=%5.7f\n\n',F)
for i=1:20 %迭代求解
if (G>e) %判断是否满足精度要求 k=k+1;
d=-g0/G; %确定搜索方向
F=subs(f,X,X0); %计算F(x)目标函数的值
fm=subs(f,X,X0+a*d); %求最优步长,以计算新的迭代点
fmd=diff(fm); %求偏导
a0=solve(fmd); %求出偏导函数的零解,求得最优步长X0=X0+a0*d; %求得新的迭代点
g0=subs(g,X,X0); %计算新的梯度
G=norm(g0); %计算新的梯度的模
g0=double(g0); %数据类型转化
G=double(G);
X0=double(X0);
F=double(subs(f,X,X0));
a0=double(a0);
%结果输出
fprintf('迭代次数k=%d;',k);
fprintf('坐标值x1=%5.7f ',X0(1));
fprintf('x2=%5.9f;',X0(2));
fprintf('函数值F=%5.7f\n',F);
fprintf('梯度g(k)=%5.7f %5.7f;',g0);
fprintf('梯度的模||g(k)||=%5.7f;',G);
fprintf('步长a(k)=%5.7f\n\n',a0);
end
end
z=[X0 F];
end
运行结果
ε时,命令窗口输入Stair(0.02),运行结果见下图:
当02
.0
=
ε时,命令窗口输入Stair(0.02),运行结果见下图:当002
.0
=。