步进电机驱动深度解析
步进电机的驱动原理
步进电机的驱动原理
步进电机的驱动原理可以通过以下几点来解释:
1. 电磁驱动:步进电机内部通常包含多个线圈,每个线圈都有一对电极。
通过交替通电来激励这些线圈,可以产生磁场。
这个磁场与固定磁铁或其他线圈的磁场相互作用,从而使电机转动。
2. 步进角度:步进电机的转动一般是围绕其轴心以一定的步进角度进行的。
这个步进角度是由电机的结构和驱动信号决定的。
常见的步进角度有1.8度、0.9度、0.72度等。
通过适当的电
流驱动和控制信号,可以实现电机按照这些角度进行准确的转动。
3. 控制信号:步进电机一般需要外部的电流驱动器或控制器来提供适当的电流和控制信号。
这些控制信号通常是脉冲信号,通过改变脉冲的频率、宽度和方向,可以控制电机的转动速度和方向。
4. 开环控制:步进电机的控制通常是开环控制,即没有反馈回路来监测电机的实际位置和速度。
控制信号是基于预先设定的脉冲数目和频率来驱动电机的。
因此,步进电机在运行过程中可能存在累积误差,特别是在高速运动或长时间运行的情况下。
总而言之,步进电机的驱动原理是通过控制电流、改变磁场以及控制信号的脉冲,实现电机按照设定的步进角度进行准确转动的过程。
一文搞懂步进电机特性原理及驱动器设计
一文搞懂步进电机特性原理及驱动器设计1、步进电机的概念步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
2、步进电机的特点步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。
优缺点如下所示。
优点:1. 电机操作易于通过脉冲信号输入到电机进行控制;2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);3. 由于没有接触电刷而实现了更大的可靠性。
缺点:1. 需要脉冲信号输出电路;2. 当控制不适当的时候,可能会出现同步丢失;3. 由于在旋转轴停止后仍然存在电流而产生热量。
3、步进电机的分类在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
步进电机驱动及控制专业技术解答
步进电机驱动及控制技术解答1.步进电机为什么要配步进电机驱动器才能工作?步进电机作为一种控制精密位移及大范围调速专用的电机, 它的旋转是以自身固有的步距角角(转子与定子的机械结构所决定)一步一步运行的, 其特点是每旋转一步,步距角始终不变,能够保持精密准确的位置。
所以无论旋转多少次,始终没有积累误差。
由于控制方法简单,成本低廉,广泛应用于各种开环控制。
步进电机的运行需要有脉冲分配的功率型电子装置进行驱动, 这就是步进电机驱动器。
它接收控制系统发出的脉冲信号,按照步进电机的结构特点,顺序分配脉冲,实现控制角位移、旋转速度、旋转方向、制动加载状态、自由状态。
控制系统每发一个脉冲信号, 通过驱动器就能够驱动步进电机旋转一个步距角。
步进电机的转速与脉冲信号的频率成正比。
角位移量与脉冲个数相关。
步进电机停止旋转时,能够产生两种状态:制动加载能够产生最大或部分保持转矩(通常称为刹车保持,无需电磁制动或机械制动)及转子处于自由状态(能够被外部推力带动轻松旋转)。
步进电机驱动器必须与步进电机的型号相匹配。
否则将会损坏步进电机及驱动器。
2.什么是驱动器的细分?运行拍数与步距角是什么关系?“细分”是针对“步距角”而言的。
没有细分状态,控制系统每发一个步进脉冲信号,步进电机就按照整步旋转一个特定的角度。
步进电机的参数,都会给出一个步距角的值。
如110BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这是步进电机固有步距角。
通过步进电机驱动器设置的细分状态,步进电机将会按照细分的步距角旋转位移角度,从而实现更为精密的定位。
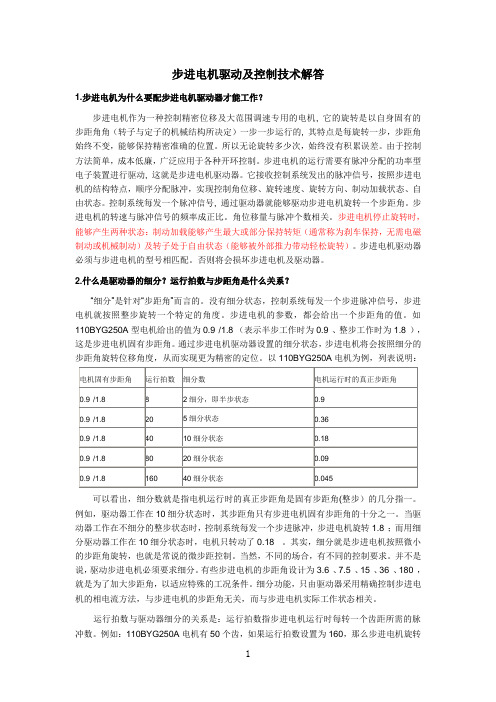
以110BYG250A电机为例,列表说明:可以看出,细分数就是指电机运行时的真正步距角是固有步距角(整步)的几分指一。
例如,驱动器工作在10细分状态时,其步距角只有步进电机固有步距角的十分之一。
当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,步进电机旋转1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18°。
步进电机驱动器参数原理
步进电机驱动器参数原理步进电机驱动器是控制步进电机运动的重要组成部分,其参数原理涉及到电机的特性、控制信号和驱动器本身的工作方式等方面。
本文将详细介绍步进电机驱动器的参数原理,包括驱动方式、步长和旋转方向、驱动电流和电压、细分和微步驱动、保护和故障等方面。
1.驱动方式:步进电机驱动器一般有两种驱动方式,即全步和半步。
全步驱动方式通过控制驱动电机的两个相位以产生电机的旋转力矩,步进角为1.8度。
而半步驱动方式则在全步的基础上,通过控制同一相位电流的大小和方向,使电机能够停留在不完全的步进角位置,步进角可达到0.9度。
2.步长和旋转方向:步长是步进电机驱动器控制电机旋转的最小单位,通常以角度来表示。
驱动器通过控制电机的脉冲信号,使电机按照指定的步长来旋转。
旋转方向则通过控制驱动器的方向信号来实现,可以使电机正转或反转。
3.驱动电流和电压:步进电机驱动器需要提供足够的电流来驱动电机,以产生足够的力矩。
驱动电流大小通常由驱动器的电流调节方式来控制,可以通过调节电流增益或设置电流值来实现。
驱动器还需要提供适当的电压来保证电机正常工作。
4.细分和微步驱动:细分是指将步进电机的一个步进角细分为更小的角度,以实现更高的分辨率和更平滑的运动。
细分通常通过驱动器内部的功率电子器件,将输入的控制信号细分产生相应的驱动信号来实现。
微步驱动则是一种特殊的细分驱动方式,可以将步进电机驱动器的分辨率进一步提高,实现更精准的位置控制和运动。
5.保护和故障:步进电机驱动器通常具有多种保护功能,以防止电机或驱动器发生故障。
常见的保护功能包括过流保护、过压保护、过热保护等。
当检测到异常情况时,驱动器会采取相应的保护措施,如自动减小电流、停止输出等。
同时,驱动器还能够检测到电机的故障状态,如断线、短路等,并通过指示灯或故障输出信号来通知用户。
总之,步进电机驱动器的参数原理包括驱动方式、步长和旋转方向、驱动电流和电压、细分和微步驱动、保护和故障等方面。
步进电机的驱动器工作原理

步进电机的驱动器工作原理步进电机的驱动器是控制步进电机运动的关键部件,它能够将电子信号转换为机械运动。
步进电机驱动器主要由两部分组成:控制器和功率放大器。
控制器负责接收输入的指令信号并进行解码,将其转换为电机驱动信号;功率放大器则将驱动信号放大并输出给步进电机的驱动电路。
下面将详细介绍步进电机驱动器的工作原理。
步进电机驱动器的工作原理主要包括三个关键步骤:接收指令信号、解码指令信号和输出驱动信号。
下面分别对这三个步骤进行了解。
一、接收指令信号步进电机驱动器首先需要接收输入的指令信号,这些指令信号可以通过输入装置、计算机或者其他设备传输给驱动器。
指令信号可以是数字信号、模拟信号或者脉冲信号,这取决于具体的应用场景。
接收到指令信号后,驱动器会将其传递给解码器进行解码。
二、解码指令信号解码器是步进电机驱动器中的关键部件,它负责将接收到的指令信号进行解码,并将其转换为电机驱动信号。
解码器一般采用数字电路来实现,可以根据不同的输入信号解读指令,然后将其转换为与步进电机匹配的驱动信号。
解码器根据输入信号的不同来确定步进电机的运动方式,包括正转、反转、加速、减速等。
解码器还可以根据指令信号的要求进行细微的微调,以确保步进电机的运动精度和稳定性。
解码器还可以根据工作环境的要求进行保护,如过载保护、过热保护等。
三、输出驱动信号解码器将解码后的指令信号传递给功率放大器进行处理。
功率放大器主要负责放大电机驱动信号的电压和电流,并将其输出给步进电机的驱动电路。
功率放大器一般由晶体管、晶闸管或者MOSFET等组成,通过调节其工作状态和电流大小来控制步进电机的旋转方式和速度。
步进电机驱动器的输出信号可以是两相驱动信号,也可以是三相或四相驱动信号,具体取决于步进电机的结构和要求。
步进电机的驱动电路主要是通过不同相位的电流驱动定子的绕组,进而产生转子的旋转。
控制器会根据解码器输出的驱动信号来控制步进电机的运动,包括转向、转速和步距等。
步进电机驱动器及细分控制原理

步进电机驱动器及细分控制原理引言:步进电机是一种将电脉冲信号转化为机械转动的电动机。
步进电机驱动器是一种用于控制步进电机旋转的设备。
步进电机可以通过控制驱动器提供的电流和脉冲信号来精确地控制旋转角度和速度。
本文将介绍步进电机驱动器的工作原理以及细分控制的原理。
一、步进电机驱动器的工作原理:1.输入电流转换:驱动器将输入的电流信号转换为电压信号。
电流信号通常由控制器产生,通过选择合适的电阻来控制输入电流的大小。
2.逻辑控制:驱动器还会接收来自控制器的脉冲信号。
这些脉冲信号会相互间隔地改变驱动器输出的电压,从而驱动步进电机旋转。
脉冲信号的频率和脉冲数量会影响步进电机的转速和旋转角度。
3.输出电压控制:驱动器会根据输入的电流和脉冲信号控制输出的电压,使其适应步进电机的工作要求。
输出电压的频率和脉冲数有助于控制步进电机旋转的速度和角度。
二、细分控制原理:细分控制是指通过控制驱动器输出的电压脉冲信号来实现更精确的步进电机控制。
细分控制可以将步进电机的每个脉冲细分成更小的步进角度,从而提高步进电机的转动分辨率。
1.脉冲信号细分:通过改变驱动器的输出脉冲信号频率和脉冲数来实现脉冲信号的细分。
例如,如果驱动器输入100个脉冲,但只输出50个脉冲给步进电机,那么每个输入的脉冲就会分为两个输出脉冲,步进电机的旋转角度将更精确。
2.电流细分:通过改变驱动器输出的电流大小来实现电流的细分。
通常情况下,驱动器的输出电流会根据步进电机的转动需要进行控制。
细分控制可以使驱动器能够实现更精确的电流控制,进而控制步进电机的转动精度。
3.微步细分:微步细分是一种更高级的细分控制方法,通过改变驱动器输出的电压波形进行微步细分。
微步细分将步进电机的每个步进角度再次细分为更小的角度,进一步提高了步进电机的转动分辨率和平滑性。
总结:步进电机驱动器是通过将控制器产生的电流和脉冲信号转换为驱动步进电机的电压信号的设备。
细分控制是通过改变驱动器输出的电流和脉冲信号来实现更精确的步进电机控制。
步进电机驱动细分原理
步进电机驱动细分原理
步进电机驱动细分原理是通过改变电流波形来实现对步进电机精细控制的一种方法。
在传统的双极性驱动方式中,每一相都只有两种状态:激活和不激活。
而细分驱动则将每一相的激活状态进行进一步细分,使得电流具有更多个离散的状态。
细分驱动的基本原理是通过改变驱动器输出的电流波形来实现对步进电机转子位置的微调。
具体来说,细分驱动使用一种特殊的电流控制技术,将总电流周期性地细分成多个小的电流脉冲。
通过改变电流脉冲的大小和时序,可以在每一个基本步进角度上进行更细致的位置控制。
通常,在步进电机驱动器中使用的细分驱动方式有全步进和半步进两种。
全步进是最基本的细分方式,在一个完整的电流周期内将电流波形分为两个相等的部分,每个部分激活的时间持续一个基本步进角度。
而半步进则是在全步进的基础上,对激活时间进行了进一步细分,使得每个部分激活的时间只有全步进时间的一半,从而实现了更精细的位置控制。
细分驱动的实现离不开现代步进电机驱动器中的电流控制电路。
这些电路通常包括高性能的电流感应器、精确的分流器和多级放大器等。
通过这些电路的协同作用,细分驱动器可以在每个细分步进角度上产生相应大小和时序的电流脉冲,实现对步进电机位置的微调控制。
总而言之,步进电机驱动细分原理是通过改变电流波形来实现
对步进电机位置的微调。
通过细分驱动方式,可以获得更精细的步进角度控制,提高步进电机的定位精度和运动平滑性。
步进电机细分驱动原理

步进电机细分驱动原理
步进电机细分驱动原理是指通过驱动电路将步进电机的每一步细分为更小的步数,从而使步进电机的转动角度更精确。
细分驱动原理的关键在于通过改变驱动电流的大小和方向来实现步进电机每一步的控制。
常见的细分驱动方式有全步细分和微步细分两种。
在全步细分中,驱动电路会根据输入的脉冲信号,按照步进电机的步距角度来控制电流大小和方向。
比如在单相全步细分驱动中,每个脉冲信号对应一个步进角度,驱动电路会根据脉冲信号的频率和方向控制电流的大小和方向,从而实现步进电机的转动。
在微步细分中,驱动电路将每一步细分为更小的步数,从而使步进电机的转动更加平滑和精确。
微步细分驱动通常采用PWM(脉宽调制)技术,通过调节电流的占空比来实现细分
控制。
例如,当需要将每一步细分为10个微步时,驱动电路
会根据输入的脉冲信号和PWM调制信号,以较高的频率控制
电流的开关状态和占空比,从而实现步进电机的微步细分控制。
细分驱动原理的核心是通过改变驱动电流的大小和方向来控制步进电机的转动角度。
通过细分驱动,可以使步进电机的转动更加平滑和精确,从而满足一些对转动精度要求较高的应用场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-
Limit
FAULT
•… Embedded Intelligence/嵌入式智能 • Ultra efficient architectures help you minimize MCU support! • 超高效的系統架構將MCU所需支援降至最低! Drop in and Spin/即插即轉 How to SelectYourDRV8x: 如何選擇適合您的 DRV8x: By Motor Type: 根據馬達類型: • Stepper, Brushed DC, BLDC, • 步進馬達、有刷 DC、BLDC、
•
PWM 將線圈中的電流 調製成爲一種波形(如 正弦波),馬達的全步 步進也被細分成爲很多 更小的步進,是爲微步 進細分。
Bipolar
AAL
ABL
BAL
BBL
a full step is divided into multiple smaller steps – µstepping. • Less mechanical noise Higher position resolution Less power dissipation
Applications/應用範圍
• • • • • • Printer/印表機 Scanner/掃描機 Textile Machinery/紡織機械 Positioning & Tracking/定位 & 追蹤 Factory Automation/工廠自動化 Robotics/機器人技術
9.7 x 6.4mm, 28-pin HTSSOP package 9.7 x 6.4mm, 28腳 HTSSOP封裝
DRV8x V.S. Discretes/DRV8x 系列 V.S. 離散元件
Short Circuit Protection Fuse
短路保險絲
+11V Supply
DRV8x: Drop in and Spin! DRV8x:即插即轉!
Smaller /更小 Better Performance / 效能更好 Thermal & Short Circuit Protection/過熱 & 短路保護 Shoot-Through Protection /擊
Controller
Step size
M
DRV8818 Motor Driver
3 to 5.5V 8 to 35V 1/8 u-steps
Selective Disclosure
DRV8818 Functional Block Diagram DRV8818 原理方框圖
8~35V
3~5.5V
Built-in charge pump 內置充電泵 Step/Direction control 步進/轉向控制
Selective Disclosure
根據供電類型/電流量: • 電源供電、電池供電 • Line-powered, Battery-powered 根據特性: By Feature: • 動態分析、電流調節、休眠模 式、熱效能、尺寸大小… • Motion profile, Current
By Power Source/Current Capability:
1 Step
• •
更小的機械雜訊 更高的位置解析度
1 Step
1 Step
• •
•
更少的功率損耗
Open Loop Control
開放迴路控制
Brushed DC
Motor Driver
• 1.8V~60V; 0~24A
• Inrush Current / Stall protection 突波電流 / 堵轉保護
Simplicity & Low Cost
有刷 DC 馬達驅動
3-Phase BLDC Motor Driver 三相 BLDC 馬達
PWM blanking and off time setting PWM 消隱/關斷時間 設定
Current sense 電流感應
Selective Disclosure
µ-Stepping 微步進細分
• 1 bipolar stepper motor → 2 H-bridges, 2
phases. • 2 Phases are alternated in a specific sequence to obtain the desired stepping • • 1個雙極步進馬達→2 個 H 橋接,雙相位 馬達的雙相交替開關生成一組驅動狀態, 這組狀態的交替頻率與順序決定馬達的步 進速度與方向. • 當馬達持續在完全電流狀態下運轉時,該 步進馬達被稱爲“全步運轉”.
rate and direction.
• Only when full current flows through the windings, the stepper is “full-stepped”.
VBB VBB
AAH
ABH
BAH
BBH
AA BA
AAH
AAL BAL
•
Full step – 4 states/全步運行 –4個狀態
Solenoid/Relay 電磁/繼電器
• EVM requires NO discrete design experience → quicker time to market! regulation, Sleep mode, Thermal • EVM 無需離散設計經驗→加速產品的上市時程! performance, Form factor…
Step / Direction
• Integrated protection features including over-current, thermal, shoot-through and UVLO protection
• P2P replacement for competitors, and runs up to 30% cooler.
VREF
VM VCP Charge Pump 20 transistors VDD VM Temperature sense 10 trans. Power-up Reset 10 trans. Clock Oscillator 15 trans. VGD Linear Reg 15 transistors HS pre-drive 30 trans OCP LS pre-drive 30 trans. VCP VM
Discrete H-Bridge Motor Driver 離散 H 橋接馬達驅動器
Selective Disclosure
穿保護
UVLO & ESD Protection /欠壓 封鎖及ESD保護
What will be introduced next are… 接下來將介紹…
• DRV8818
Features
• Dual H-Bridge stepper motor driver • Supply voltage: 8~35V • Output current: 1.75A RMS / 2.5A peak per winding
• P2P upgrade to DRV8811 with lower Rdson (0.37Ω HS+LS) • On-chip indexer supports up to 1/8 micro-stepping • Programmable mixed (fast + slow) decay mode
Smarter. Safer. Greener.
What Can DRV8x Do? DRV8x 可實現什麼?
• 1.8V~60V; 0~12A Stepper Motor Driver • High Count µ-Stepping Indexer 高細分微步進索引
步進馬達驅動
• Current Regulation / Control 電流調節/控制
– 2.5A Stepper Driver
• DRV8818
– 2.5A 步進馬達驅動器
New!!
• DRV8837 • DRV8844
– 1.8A Low Voltage Brushed DC Driver
New!!
• DRV8837
新品 上市!!
– 1.8A 低電壓直流有刷 馬達驅動器
– 2.5A Half Bridge Driver
BAH ABL
Bipolar
AB BB
ABH BBH
• •
Mechanical noise/機械雜訊 Limited position resolution/有 限的馬達位置解析度
BBL
AAL
ABL
BAL
BBL
•
Bipolar Motor and Drive
High power loss/功率損耗較 大
Selective Disclosure
µ-Stepping 微步進細分
VBB VBB
AAH ABH BAH BBH
•
By PWM chopping the current through windings is regulated to a multi-level waveform (e.g. sine), and
驅動
Selective Disclosure
可靠、高效
DRV8x Family Feature Intro DRV8x系列産品特性介紹
Reduced Board Space/減少電路板空間 • Up to 20x smaller than discrete solutions! • 比離散解決方案少 20 倍的面積! Fully Protected/全面保護 • Short Circuit, Over Current, Thermal, UVLO…