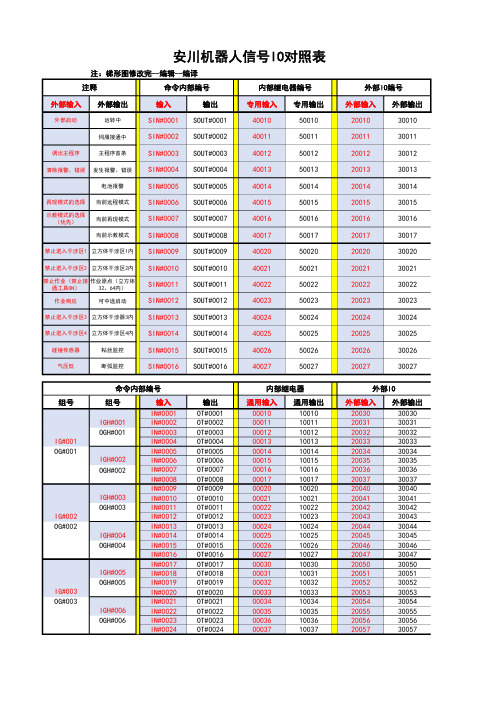
安川机器人IO信 对照表
安川机器人外部IO启动
安川外部IO启动正文:一、安川外部IO启动1.1 引言安川是一种高性能的自动化设备,具有广泛的应用领域。
为了实现的正常运行,需要对外部IO进行启动配置。
本文档将详细介绍安川外部IO的启动步骤和配置要求。
1.2 目的本文档的目的是为操作人员提供安川外部IO启动的参考指导,确保能够正确地连接和实现IO功能。
1.3 适用范围本文档适用于使用安川的用户和维护人员,包括但不限于以下具体应用:工业生产线、装配线、焊接应用等。
二、外部IO启动步骤2.1 硬件准备在启动安川的外部IO之前,需要进行以下硬件准备工作:1) 确保的电源正常连接并接通;2) 将与外部IO设备通过适当的接口进行连接;3) 验证连接线路的稳定性和连接端口的正确性。
2.2 IO配置界面安川提供了用户界面来进行IO的配置。
在控制器上,打开IO 配置界面,并确保界面显示正常。
2.3 IO配置参数设置根据具体应用需求,设置外部IO的参数。
包括输入信号的类型和数量、输出信号的类型和数量、信号的电平范围等。
2.4 检查和测试在完成IO配置参数设置后,进行IO的检查和测试,确保IO信号的正常传输和响应。
可以通过观察的状态、检查IO指示灯或使用示波器等方式进行测试。
2.5 调试和优化根据检查和测试的结果,对于存在的问题进行调试和优化。
可以修改参数设置、调整连接线路、更换IO设备等方式来解决问题。
三、附件本文档附有以下附件供参考:1) 安川外部IO启动配置图表;2) 安川外部IO连接线路图;3) 其他相关配置文件或工具。
四、法律名词及注释1、外部IO:指连接到控制器的输入输出设备,用于与进行信号交互。
2、接口:用于外部IO设备与控制器之间的物理连接和信号传输。
3、参数设置:指根据应用需求和设备规格,对外部IO的各项参数进行配置和调整。
4、检查和测试:用于验证外部IO设备和信号传输的正确性和可靠性。
5、调试和优化:通过修改参数设置、调整连接线路等方式,解决IO信号传输中的问题,达到优化IO的目的。
安川机器人通用输入输出信 定义

20036 B6 IN07
20037 A6 IN08
B7 024VU
A7 024VU
30024 B8 ᮁ⇨ ⲥ
30025 A8 ᮁϱ ⲥ
30026 B9 ㉬ϱ ⲥ
30027 A9 ᮁᓻ ⲥ
30030 B10 OUT01 䗮⫼䕧ߎ
30031 A10 OUT02
30032 B11 OUT03
IN
20013 A2 䄺䄺ԡ
IN
20014 B3 㧙
IN
20015 A3 ⦄ݡᓣ䗝ᢽ
IN
20016 B4 冫ᬭᓣ䗝ᢽ
IN
20017 A4 㧙
IN
20020 B5 火ℶ䖯ܹᑆ⍝ऎ
IN
20021 A5 火ℶ䖯ܹᑆ⍝ऎ
IN
20022 B6 火ℶϮ
IN
20023 A6 Ϯᑨㄨ
IN
B7 024VU A7 024VU
A20
ッᄤ1R B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6
A6 024VU 024VU
B8 A8 B9 A9
B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15
A15 024VU 024VU 024VU 024VU +24VU +24VU +24VU +24VU
A20
ッᄤো B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6
A6 024VU 024VU
B8 A8 B9 A9
B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15
A15 024VU 024VU 024VU 024VU +24VUޓޓޓޓ +24VU +24VU +24VU
安川机器人IO信号对照表
外部输出
30060 30061 30062 30063 30064 30065 30066 30067 30070 30071 30072 30073 30074 30075 30076 30077 30080 30081 30082 30083 30084 30085 30086 30087 30090 30091 30092 30093 30094 30095 30096 30097 30100 30101 30102 30103 30104 30105 30106 30107 30110 30111 30112 30113 30114 30115 30116 30117 30120 30121 30122 30123 30124 30125 30126 30127
40025
50025
碰撞传感器
粘丝监控
SIN#0015 SOUT#0015
40026
50026
气压低
断弧监控
SIN#0016 SOUT#0016
40027
50027
组号 IG#001 OG#001
IG#002 OG#002
IG#003 OG#003
命令内部编号
组号 IGH#001 OGH#001
IGH#002 OGH#002
输出
OT#0001 OT#0002 OT#0003 OT#0004 OT#0005 OT#0006 OT#0007 OT#0008 OT#0009 OT#0010 OT#0011 OT#0012 OT#0013 OT#0014 OT#0015 OT#0016 OT#0017 OT#0018 OT#0019 OT#0020 OT#0021 OT#0022 OT#0023 OT#0024
安川机器人代码报错(中文)
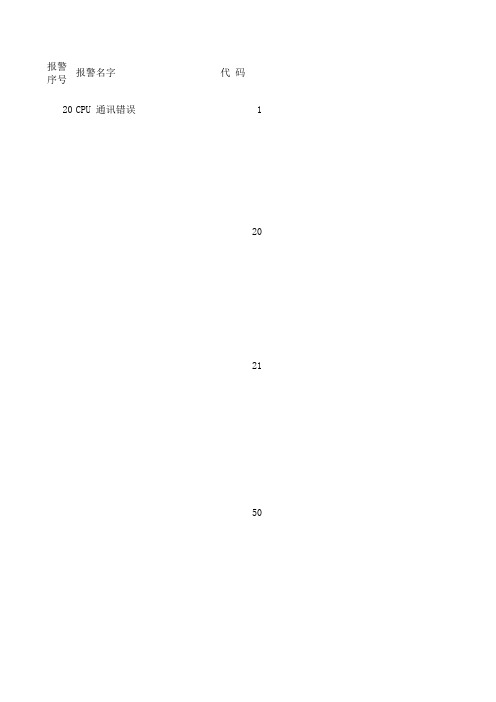
290 内存错误 (网络 设置)
300
验证错误 (系统 配置数据)
2
4
5
7
8
11
12
301 验证错误 (蹂躏输入 集)
310
验证错误 (CMOS存储器 大小)
320 验证错误 (I / O模块)
1
2
3 4 5 6 7
8 9 10 11 12
13 14 15 16 17
18 19
912 CPU 错误 (YCP02#2) 913 CPU 错误 (YCP02#3) 914 CPU 错误 (YCP02#4) 915 CPU 错误 (YCP02#5) 916 CPU 错误 (YCP02#6) 917 CPU 错误 (YCP02#7) 918 CPU 错误 (YCP02#8)
920 BUS错误(YCP01)
文件备份 误差 (YCP01 CF)
801
文件加载 误差 (YCP01 CF)
802
文件I CF)
/
O错误 (YCP01
803
文件错误 文件的错误 文件中的错误
810 TOYOPUC分配 DEF误差
1
3
4
5 8 9 10 12 14 16 18 20 22 23
30
31 32 34 41 42 44 45 900 监督 定时误差 (YIF板) 901 监督 定时误差 (YCP02 # 1) 902 监督 定时误差 (YCP02 # 2) 903 监督 定时误差 (YCP02 # 3)
1220 局域网通信参数错误
1
2
3
4
30
31
32
33
70
71
73
74
安川机器人外部IO启动
引言:在现代工业生产中,技术被广泛应用,安川作为全球领先的制造商之一,其产品以其高度的稳定性和可靠性而闻名。
安川外部IO 启动是指通过外部IO端口与其他设备进行连接,实现的启动和控制。
本文将详细阐述安川外部IO启动的相关内容。
正文:1.外部IO概述1.1定义:外部IO(Input/Output)是指与周边设备进行通信和数据交换的接口。
1.2作用:外部IO可以实现与其他设备的联动控制,如传感器的输入和执行器的输出。
1.3类型:外部IO可分为数字IO和模拟IO两种类型。
1.4数字IO:数位量输入或输出,一般用于触发输入和开关量输出。
1.5模拟IO:模拟量输入或输出,一般用于传感器数据输入和执行器控制输出。
2.安川外部IO接口2.1安川外部IO接口介绍:安川提供了丰富的外部IO接口,以满足不同应用需求。
2.2信号类型:安川外部IO接口包括数字输入、数字输出、模拟输入、模拟输出等多种类型。
2.3连接方式:安川外部IO接口通常通过连接线与外部设备进行连接,具体连接方式根据应用需求而定。
2.4扩展性:安川外部IO接口可通过扩展模块进行扩展,从而满足更多的输入输出需求。
3.安川外部IO启动步骤3.1硬件准备:准备安川和外部设备之间的连接线,并确保连接正确无误。
3.2软件设置:在安川控制系统中进行外部IO设置,包括指定IO端口的功能和参数。
3.3信号调试:通过测试外部设备的输入输出信号,确保与安川的通信正常。
3.4联动程序编写:根据具体应用需求编写与外部设备的联动程序,实现启动和控制功能。
3.5联动测试:进行与外部设备的联动测试,验证系统的稳定性和可靠性。
4.安川外部IO应用案例4.1与传感器的联动:通过外部IO接口连接传感器,实现自动检测和反馈控制。
4.2与执行器的联动:通过外部IO接口连接执行器,实现自动执行和控制。
4.3与PLC的联动:通过外部IO接口与PLC进行通信,实现工业自动化控制。
4.4与视觉系统的联动:通过外部IO接口连接视觉系统,实现视觉引导和识别功能。
安川机器人外部IO启动.docx

精品文档安川机器人外部IO 启动安川机器人的外部IO 启动运行,即通过外部信号控制机器人启动、暂停、复位、选择主程序和运行程序。
一、安川机器人机械安全端子台基板(JANCD-YFC22-E )1、机械安全I/O基板(JANCD-YSF22B-E)2、安全端子台基板接线外引(1 )机械安全端子台基板( JANCD-YFC22-E)是为了连接安全输出、输入信号等专用外部信号的端子台基板。
精品文档( 2 )安全端子基台实物图片3、安全段子台基板100 个端口作用JANCD-YFC22-E连接端子表二、安川机器人通用I/O基板(JANCD-YIO21-E)1、通用IO 基板插头外接( 1 )电箱背板插头精品文档( 2 )外接实物图( 3 )机器人通用输入输出连接器(CN306、 307 、 308 、 309 )机器人通用输入输出连接器(CN306、307 、308 、309 )的连接制作连接在通用I/O基精品文档下图。
电线请使用无屏蔽的双绞线。
(电线一侧的插头及I/O端子台为选装件)( 4 )连接器端子头( 5 )外接端子实物图CN306( 6 )外接端子实物图CN3082、通用IO 基板供电电源( 1 )接线板端子( 2 )实物接线图:用外接开关电源24V 和 0V3、通用IO 基板 CN306 图(1 ) CN306 接线端子图精品文档(2 ) CN306 实物图精品文档4、通用IO 基板 CN307精品文档5、通用IO 基板 CN308(1 ) CN308 接线端子图精品文档(2 ) CN308 实物图精品文档精品文档6、通用IO 基板 CN309三、安川外部启动常用的信号及其接线图1、安全端子台基板常用IO 接线图( 1 )外部急停接线图外连接外部操作设备等的急停开关时使用。
输入信号,关闭伺服电源,停止程序执行。
信号输入时,无法接通伺服电源。
由于机器人出厂时配有跳线,使用时必须先取下跳线。
不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
安川PLC及IO模块介绍
安川PLC及IO模块介绍PLC及IO模块以下主要介绍:317及317配备的模块,316H,RIO-120,317整体性能:CPU 32位通用处理器主要内存 *1 程序内存相当于32k步长 *2数据内存 32768单字:数据(M)寄存器1024单字:系统(S)寄存器32768单字:输入(I)寄存器备用电池保留一年或32768单字:输出(O)寄存器一年以上。
16384单字:普通常量(C)寄存器注)与程序内存相同。
16384单字/DWG:DWG(D)寄存器注)16384单字/DWG:常量(#)寄存器注) 跟踪内存 32k单词,8:定义跟踪16点数据注)32k单词:定义跟踪500项故障注) 程序执行控制方法常量循环扫描法:2级;高速和低速高速扫描时间设定:1至300ms(单位为0.1ms)低速扫描时间设定:1至300ms(单位为0.1ms)317较316H更加强大,处理速度更快,接口更多,317配套模块:(215,216,261,217,218,AI-01,AO-01)PO-01模块多达4个轴的位置控制命令:脉冲串位置检测:无(安装了CNTR-01计数器模块后变为可能)可选模块I/O 寄存器输入:512个单词(输入/输出用的前496个单词,其余16个单词用(CP-213:1行/模块) 于系统使用)寄存器输出:512个单词(输入/输出用的前496个单词,其余16个单词用于系统使用)I/O 寄存器输入:2048个单词 (CP-215:1行/模块) 寄存器输出:512个单词(最多) I/O 寄存器输入/输出:1024个单词 (CP-216:1行/模块)I/O 寄存器输入:1024个单词 (CP-225:1行/模块) 寄存器输出:1024个单词I/O 寄存器输入/输出:1024个单词 (CP-2500:1行/模块) 寄存器输出:256个单词(最多) I/O 寄存器输入/输出:1024个单词 (CP-2520:1行/模块) 寄存器输出:1000个单词(最多) I/O 寄存器输入/输出:512个单词 (2000IOIF:1行/模块) I/O 寄存器输入:512个单词 (820IF:1行/模块) 寄存器输出:512个单词 I/O DI:32点 (LIO-01) DO:32点输入 PI:4点(CNTR-01)输入 AI:8点(AI-01)输入 DI:64点(DI-01)输出 AO:4点(AO-01)输出 DO:64点(DO-01)消息传输(可选) CP-213:独有的过程CP-215:MEMOBUS协议/无协议CP-216:MEMOBUS协议/无协议CP-217:MEMOBUS协议/无协议CP-218:MEMOBUS协议/无协议CP-225:MEMOBUS协议/无协议CP-2500:MEMOBUS协议/无协议CP-2520:MEMOBUS协议/无协议其它日历和时间(年、月、日、小时、分钟、秒)诊断功能由监视计时器和总线计时器检测错误ROM:总数检测RAM:读/写检测电池低电压检测? 指示灯当CP-317在线且正常运转时,RDY LED和RUN LED灯亮,并且ALM LED和ERR LED灯灭。
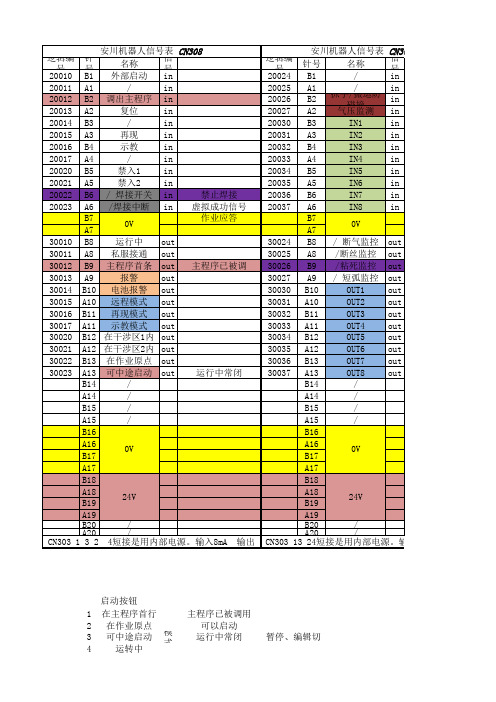
安川机器人信号
0V
24V
/ /
川机器人信号表 CN307
信号 通用IO
in
IN17
in
IN18
in
IN19
in
IN20
in
IN21
in
IN22
in
IN23
in
IN24
HSEN1 HSEN2 HSEN3 HSEN4 HSEN5 HSEN6 HSEN7 HSEN8
焊机点冷焊却异
焊枪常冷9却异
变压常器1过0 热
30053
30054
30055
30056
30057
针号 B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6 A6 B7 A7 B8 A8 B9 A9 B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15 A15 B16 A16 B17 A17 B18 A18 B19 A19 B20 A20
B18
A18 B19
24V
A19
B20
/
A20
/
CN303 1 3 2 4短接是用内部电源。输入8mA 输出
逻辑编 20号024
安川机器人信号表
针号
名称
B1
/
CN309 信 号 in
20025 20026 20027
A1 B2 A2
抓手//搬运防 气碰压撞监测
in in in
20030 B3
IN1
in
/
A15
/
B16
A16 B17
0V
A17
B18
A18 B19
24V
内部电源。输入8mA 输出
A19
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
注:梯形图修改完--编辑--编译外部输入
外部输出
输入输出专用输入专用输出外部输入外部输出外部启动
运转中SIN#0001SOUT#000140010500102001030010伺服接通中
SIN#0002SOUT#000240011500112001130011调出主程序主程序首条SIN#0003SOUT#000340012500122001230012清除报警、错误
发生报警、错误
SIN#0004SOUT#000440013500132001330013电池报警
SIN#0005SOUT#000540014500142001430014再现模式的选择当前远程模式SIN#0006SOUT#000640015500152001530015示教模式的选择
(优先)
当前再现模式SIN#0007SOUT#000740016500162001630016当前示教模式
SIN#0008SOUT#000840017500172001730017禁止进入干涉区1立方体干涉区1内SIN#0009SOUT#000940020500202002030020禁止进入干涉区2立方体干涉区2内SIN#0010SOUT#001040021500212002130021禁止作业(禁止接通工具ON)作业原点(立方体
32、64内)
SIN#0011SOUT#001140022500222002230022作业响应
可中途启动
SIN#0012SOUT#001240023500232002330023禁止进入干涉区3立方体干涉器3内SIN#0013SOUT#001340024500242002430024禁止进入干涉区4立方体干涉区4内SIN#0014SOUT#001440025500252002530025碰撞传感器粘丝监控SIN#0015SOUT#001540026500262002630026气压低
断弧监控
SIN#0016
SOUT#0016
40027
50027
20027
30027
组号
组号输入输出通用输入通用输出外部输入外部输出IN#0001OT#000100010100102003030030IN#0002OT#000200011100112003130031IN#0003OT#000300012100122003230032IN#0004OT#000400013100132003330033IN#0005OT#000500014100142003430034IN#0006OT#000600015100152003530035IN#0007OT#000700016100162003630036IN#0008OT#000800017100172003730037IN#0009OT#000900020100202004030040IN#0010OT#001000021100212004130041IN#0011OT#001100022100222004230042IN#0012OT#001200023100232004330043IN#0013OT#001300024100242004430044IN#0014OT#001400025100252004530045IN#0015OT#001500026100262004630046IN#0016OT#001600027100272004730047IN#0017OT#001700030100302005030050IN#0018OT#001800031100312005130051IN#0019OT#001900032100322005230052IN#0020OT#002000033100332005330053IN#0021OT#002100034100342005430054IN#0022OT#002200035100352005530055IN#0023OT#002300036100362005630056IN#0024
OT#0024
00037
10037
20057
30057安川机器人信号IO对照表
内部继电器外部IO
内部继电器编号外部IO编号IGH#006OGH#006
命令内部编号
OGH#002
IG#003OG#003
IG#002OG#002
命令内部编号
注释
IG#001OG#001
IGH#001
OGH#001
IGH#002IGH#003OGH#003
IGH#004OGH#004
IGH#005OGH#005
组号
组号输入输出通用输入通用输出外部输入
外部输出IN#0025OT#002500040100402006030060IN#0026OT#002600041100412006130061IN#0027OT#002700042100422006230062IN#0028OT#002800043100432006330063IN#0029OT#002900044100442006430064IN#0030OT#003000045100452006530065IN#0031OT#003100046100462006630066IN#0032OT#003200047100472006730067IN#0033OT#003300050100502007030070IN#0034OT#003400051100512007130071IN#0035OT#003500052100522007230072IN#0036OT#003600053100532007330073IN#0037OT#003700054100542007430074IN#0038OT#003800055100552007530075IN#0039OT#003900056100562007630076IN#0040OT#004000057100572007730077IN#0041OT#004100060100602008030080IN#0042OT#004200061100612008130081IN#0043OT#004300062100622008230082IN#0044OT#004400063100632008330083IN#0045OT#004500064100642008430084IN#0046OT#004600065100652008530085IN#0047OT#004700066100662008630086IN#0048OT#004800067100672008730087IN#0049OT#004900070100702009030090IN#0050OT#005000071100712009130091IN#0051OT#005100072100722009230092IN#0052OT#005200073100732009330093IN#0053OT#005300074100742009430094IN#0054OT#005400075100752009530095IN#0055OT#005500076100762009630096IN#0056OT#005600077100772009730097IN#0057OT#005700080100802010030100IN#0058OT#005800081100812010130101IN#0059OT#005900082100822010230102IN#0060OT#006000083100832010330103IN#0061OT#006100084100842010430104IN#0062OT#006200085100852010530105IN#0063OT#006300086100862010630106IN#0064OT#006400087100872010730107IN#0065OT#006500090100902011030110IN#0066OT#006600091100912011130111IN#0067OT#006700092100922011230112IN#0068OT#006800093100932011330113IN#0069OT#006900094100942011430114IN#0070OT#007000095100952011530115IN#0071OT#007100096100962011630116IN#0072OT#007200097100972011730117IN#0073OT#007300100101002012030120IN#0074OT#007400101101012012130121IN#0075OT#007500102101022012230122IN#0076OT#007600103101032012330123IN#0077OT#007700104101042012430124IN#0078OT#007800105101052012530125IN#0079OT#007900106101062012630126IN#0080
OT#0080
00107
10107
20127
30127
IG#005OG#005
IGH#007OGH#007
IG#004OG#004
命令内部编号
内部继电器外部IO
IG#006OG#006
IG#007OG#007
IG#008OG#008
IG#009OG#009
IG#010OG#010
IGH#008OGH#008
IGH#009OGH#009
IGH#010OGH#010
IGH#011OGH#011
IGH#012OGH#012
IGH#013OGH#013
IGH#019OGH#019
IGH#014OGH#014
IGH#015OGH#015
IGH#016OGH#016
IGH#020OGH#020
IGH#017OGH#017
IGH#018OGH#018。