555时基经典电路51例
时基电路555各种应用电路

时基电路555各种应用电路555触摸定时开关集成电路IC1是一片555定时电路,在这里接成单稳态电路。
平时由于触摸片P 端无感应电压,电容C1通过555第7脚放电完毕,第3脚输出为低电平,继电器KS释放,电灯不亮。
当需要开灯时,用手触碰一下金属片P,人体感应的杂波信号电压由C2加至555的触发端,使555的输出由低变成高电平,继电器KS吸合,电灯点亮。
同时,555第7脚内部截止,电源便通过R1给C1充电,这就是定时的开始。
当电容C1上电压上升至电源电压的2/3时,555第7脚道通使C1放电,使第3脚输出由高电平变回到低电平,继电器释放,电灯熄灭,定时结束。
定时长短由R1、C1决定:T1=1.1R1*C1。
按图中所标数值,定时时间约为4分钟。
D1可选用1N4148或1N4001。
相片曝光定时器附图电路是用555单稳电路制成的相片曝光定时器。
用人工启动式单稳电路。
工作原理:电源接通后,定时器进入稳态。
此时定时电容CT的电压为:VCT=VCC=6V。
对555这个等效触发器来讲,两个输入都是高电平,即VS=0。
继电器KA不吸合,常开点是打开的,曝光照明灯HL不亮。
按一下按钮开关SB之后,定时电容CT立即放到电压为零。
于是此时555电路等效触发的输入成为:R=0、S=0,它的输出就成高电平:V0=1。
继电器KA吸动,常开接点闭合,曝光照明灯点亮。
按钮开关按一下后立即放开,于是电源电压就通过RT向电容CT充电,暂稳态开始。
当电容CT上的电压升到2/3VCC既4伏时,定时时间已到,555等效电路触发器的输入为:R=1、S=1,于是输出又翻转成低电平:V0=0。
继电器KA释放,曝光灯HL熄灭。
暂稳态结束,有恢复到稳态。
曝光时间计算公式为:T=1.1RT*CT。
本电路提供参数的延时时间约为1秒~2分钟,可由电位器RP调整和设置。
电路中的继电器必需选用吸合电流不应大于30mA的产品,并应根据负载(HL)的容量大小选择继电器触点容量。
555时基电路内部结构及工作原理实例详解
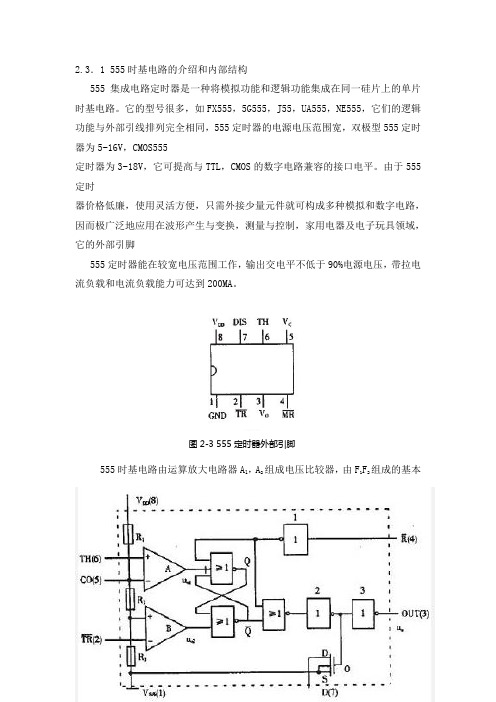
2.3.1 555时基电路的介绍和内部结构555集成电路定时器是一种将模拟功能和逻辑功能集成在同一硅片上的单片时基电路。
它的型号很多,如FX555,5G555,J55,UA555,NE555,它们的逻辑功能与外部引线排列完全相同,555定时器的电源电压范围宽,双极型555定时器为5~16V,CMOS555定时器为3~18V,它可提高与TTL,CMOS的数字电路兼容的接口电平。
由于555定时器价格低廉,使用灵活方便,只需外接少量元件就可构成多种模拟和数字电路,因而极广泛地应用在波形产生与变换,测量与控制,家用电器及电子玩具领域,它的外部引脚555定时器能在较宽电压范围工作,输出交电平不低于90%电源电压,带拉电流负载和电流负载能力可达到200MA。
图2-3 555定时器外部引脚555时基电路由运算放大电路器A1,A2组成电压比较器,由F1F2组成的基本R—S触发器以及由F3和NPN型集成电极开路输出的放电三极管TD等组成的输出级和放电开关。
其中电压比较器的分压偏置电阻采用三个阻值相同的5K电阻,所以电路因此特征而被命名为“555时基电路”。
555时基电路的内部结构图如图2-4。
图2-4 555时基电路图2.3.2 555时基电路的工作原理及功能电压比较1)分压器3个5K 电阻组成,为两个A1和A2提供基准电平,如控制端CO,则经分压后,A的基准电平为2/3Ucc,B的基准电平为1/3Ucc,如改变管脚的接法就改变了两个电压比较器的基准电平2)比较器比较器A1,B2是两个结构和性能完全相同的高精度电压比较器,其输出直接控制着基本R-S触发器的状态。
TH是比较器A1的输入端,TR是比较器A2的输入端。
当TH输入信号使U6》2/3Ucc,则A1输出交电平,否则A输出为低电平,当R输入信号使号使V2》1/3Ucc,A2输出为低电平,否则输出高电平3)基本R—S触发器基本R——S触发器要求低电平触发,图中F1的输入端接UC1,为置O输入端(R),F2的输入端接Uc2为置输入端(S)。
实验八555时基电路
实验八-555时基电路实验八555时基电路一、实验目的1、熟悉555型集成时基电路的电路结构、工作原理及其特点2、掌握555型集成时基电路的基本应用二、实验原理集成时基电路称为集成定时器,是一种数字、模拟混合型的中规模集成电路,其应用十分广泛。
它是一种产生时间延迟和多种脉冲信号的电路,由于内部电压标准使用了3个5K电阻,故取名555电路。
其电路类型有双极型和CMOS型两大类,二者的机构与工作原理类似。
几乎所有的双极型产品型号最后的三位数码都是555或556;所有的CMOS产品型号最后四位数码都是7555或7556,二者的逻辑功能和引脚排列完全相同,易于互换。
555和7555是单定时器。
556和7556是双定时器。
双极型的电源电压Vec=+5V~+15V,输出的最大电流可达200mA。
CMOS 型的电源电压为+3~+18V。
1、555电路的工作原理555电路的内部电路方框图如图所示。
它含有两个电压比较器,一个基本RS触发器,一个放电开关管T,比较器的参考电压由三只5KΩ的电阻器构成分压器提供。
它们分别使高电平比较器A1的同相输入端和低电平比较器A2的反相输入端的参考电平为Vcc和Vcc。
A1与A2的输出端控制RS触发器状态和放电管开关状态。
当输入信号自6脚,即高电平触发输入并超过参考电平Vcc 时,触发器复位,555的输出端3脚输出低电平,同时放电开关管导通;并输入信号自2脚输入并低于Vcc时,触发器置位,555的3脚输出高电平,同时放电开关管截止。
RD是复位端,当RD=0,555输出低电平。
平时RD端开路或接Vcc。
Vc是控制电压端(5脚),平时输出Vcc作为比较器A1的参考电平,当5脚外接一个输入电压,即改变了比较器的参考电平,从而实现对输出的另一种控制,在不接外电压时,通常接一个0.01μf的电容器到地,起滤波作用,以消除外来的干扰,以确保参考电平的稳定。
为放电管,当T导通时,将给接于脚7的电容器提供低电阻放电通路。
《数字电路》555时基电路实验
《数字电路》555时基电路实验一、实验目的1、掌握555时基电路的结构和工作原理,学会对此芯片的正确使用。
2、学会分析和测试用555时基电路构成的多谐振荡器、单稳态触发器、R-S触发器等三种典型电路。
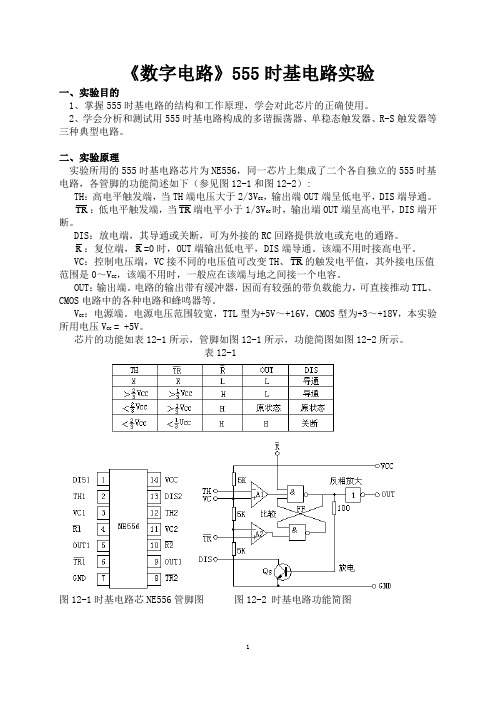
二、实验原理实验所用的555时基电路芯片为NE556,同一芯片上集成了二个各自独立的555时基电路,各管脚的功能简述如下(参见图12-1和图12-2):,输出端OUT端呈低电平,DIS端导通。
TH:高电平触发端,当TH端电压大于2/3VCCTR:低电平触发端,当TR端电平小于1/3V CC时,输出端OUT端呈高电平,DIS端开断。
DIS:放电端,其导通或关断,可为外接的RC回路提供放电或充电的通路。
R:复位端,R=0时,OUT端输出低电平,DIS端导通。
该端不用时接高电平。
VC:控制电压端,VC接不同的电压值可改变TH、TR的触发电平值,其外接电压值,该端不用时,一般应在该端与地之间接一个电容。
范围是0~VCCOUT:输出端。
电路的输出带有缓冲器,因而有较强的带负载能力,可直接推动TTL、CMOS电路中的各种电路和蜂鸣器等。
:电源端。
电源电压范围较宽,TTL型为+5V~+16V,CMOS型为+3~+18V,本实验 VCC= +5V。
所用电压VCC芯片的功能如表12-1所示,管脚如图12-1所示,功能简图如图12-2所示。
表12-1图12-1 时基电路芯NE556管脚图图12-2 时基电路功能简图图12-3 测试接线图图12-4 多谐振荡电路555时基电路的应用十分广泛,在波形产生、变换、测量仪表、控制设备等方面经常用到。
采用555时基电路构成的多谐振荡器、单稳态触发器和R-S触发器的电路分别见图12-4、图12-6和图12-7。
由555时基电路构成的多谐振荡器的工作原理是:利用电容充放电过程中电容电压的变化来改变加在高低电平触发端的电平的变化,使555时基电路内RS触发器的状态置“1”、置“0”,从而在输出端获得矩形波。
555所有小制作实例
图 5-62 19.延时开的小“灯” 图 5-63 是它的电路图,它是将延时关电路中的电阻和电容交换位置,便可成为延时开的电路。 按下按键,发光二极管由亮转灭,当手指离开按键后,会发现过一会儿发光二极管才亮。
图 5-63 20.水沸报警器 先将热敏电阻放入一个直径为 8 毫米左右、长 100 毫米的铜管或不锈钢管内,引出导线,用树 脂封好,不能进水。图 5-64 是它的电路图。实验时插入开水中,要慢慢调整可调电阻的阻值,使它到 100℃ 时音响报警,低于这个温度时没有音响报警。
图 5-58 15.见光响音乐 早上阳光照进屋内,它就播放出音乐。图 5-59 是它的电路图,它是在见光就亮的光控“灯”中, 去掉发光二极管,改接音乐片和扬声器而成。制作时可以根据自己所希望的亮度,慢慢调整可调电阻值。 该装置还可以以市场销售的小型激光指示器为光源枪,将光敏电阻安放在靶心处,找一个不透 光的圆筒套在光敏电阻上,遮挡外部光线对它的干扰,调整可调电阻值,做成光电打靶器。
图 5-59 16.黑暗光控报警器 图 5-60 是它的电路图,它是在黑暗控制“灯”亮电路中接上音乐片电路,制作时根据所需的暗 度下调整可调电阻值到发出音乐响声。 该装置还可以与小型激光指示器或其他光线配合,做成报警器,如在圈养的动物外围,将小型 激光指示器远距离照射光敏电阻,当有动物外逃时,挡住激光束,便会报警。或者将脚③与计算器中的连 加相接,用来对传送带上的物品个数进行计算,或者用于通道显示有人、动物通过等。
555时基电路
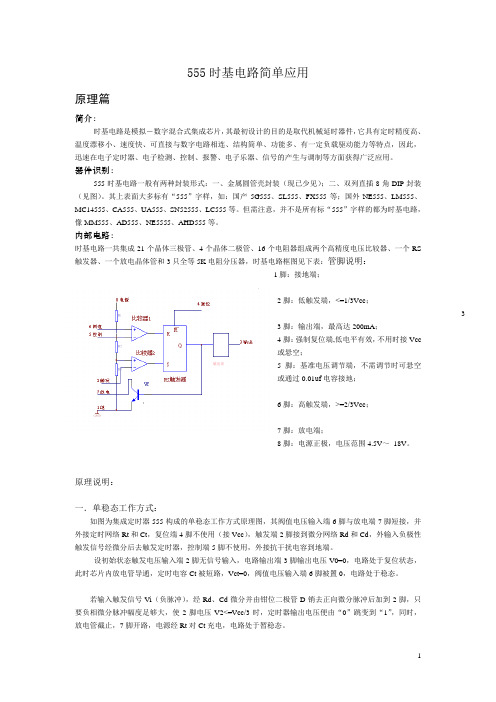
555时基电路简单应用原理篇简介:时基电路是模拟-数字混合式集成芯片,其最初设计的目的是取代机械延时器件,它具有定时精度高、温度漂移小、速度快、可直接与数字电路相连、结构简单、功能多、有一定负载驱动能力等特点,因此,迅速在电子定时器、电子检测、控制、报警、电子乐器、信号的产生与调制等方面获得广泛应用。
器件识别:555时基电路一般有两种封装形式:一、金属圆管壳封装(现已少见);二、双列直插8角DIP封装(见图)。
其上表面大多标有“555”字样,如:国产5G555、SL555、FX555等;国外NE555、LM555、MC14555、CA555、UA555、SN52555、LC555等。
但需注意,并不是所有标“555”字样的都为时基电路,像MM555、AD555、NE5555、AHD555等。
内部电路:时基电路一共集成21个晶体三极管、4个晶体二极管、16个电阻器组成两个高精度电压比较器、一个RS触发器、一个放电晶体管和3只全等5K电阻分压器,时基电路框图见下表:管脚说明:1脚:接地端;2脚:低触发端,<=1/3Vcc;33脚:输出端,最高达200mA;4脚:强制复位端,低电平有效,不用时接Vcc或悬空;5脚:基准电压调节端,不需调节时可悬空或通过0.01uf电容接地;6脚:高触发端,>=2/3Vcc;7脚:放电端;8脚:电源正极,电压范围4.5V~18V。
原理说明:一.单稳态工作方式:如图为集成定时器555构成的单稳态工作方式原理图,其阀值电压输入端6脚与放电端7脚短接,并外接定时网络Rt和Ct,复位端4脚不使用(接Vcc),触发端2脚接到微分网络Rd和Cd,外输入负极性触发信号经微分后去触发定时器,控制端5脚不使用,外接抗干扰电容到地端。
设初始状态触发电压输入端2脚无信号输入,电路输出端3脚输出电压V0=0,电路处于复位状态,此时芯片内放电管导通,定时电容Ct被短路,Vct=0,阀值电压输入端6脚被置0,电路处于稳态。
555典型应用电路
555我们知道,555电路在应用和工作方式上一般可归纳为3类。
每类工作方式又有很多个不同的电路。
在实际应用中,除了单一品种的电路外,还可组合出很多不同电路,如:多个单稳、多个双稳、单稳和无稳,双稳和无稳的组合等。
这样一来,电路变的更加复杂。
为了便于我们分析和识别电路,更好的理解555电路,这里我们这里按555电路的结构特点进行分类和归纳,把555电路分为3大类、8种、共18个单元电路。
每个电路除画出它的标准图型,指出他们的结构特点或识别方法外,还给出了计算公式和他们的用途。
方便大家识别、分析555电路。
下面将分别介绍这3类电路。
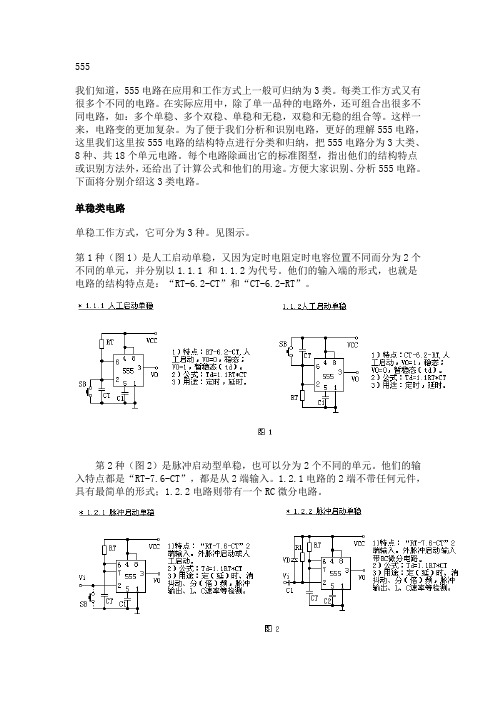
单稳类电路单稳工作方式,它可分为3种。
见图示。
第1种(图1)是人工启动单稳,又因为定时电阻定时电容位置不同而分为2个不同的单元,并分别以1.1.1 和1.1.2为代号。
他们的输入端的形式,也就是电路的结构特点是:“RT-6.2-CT”和“CT-6.2-RT”。
第2种(图2)是脉冲启动型单稳,也可以分为2个不同的单元。
他们的输入特点都是“RT-7.6-CT”,都是从2端输入。
1.2.1电路的2端不带任何元件,具有最简单的形式;1.2.2电路则带有一个RC微分电路。
第3种(图3)是压控振荡器。
单稳型压控振荡器电路有很多,都比较复杂。
为简单起见,我们只把它分为2个不同单元。
不带任何辅助器件的电路为1.3.1;使用晶体管、运放放大器等辅助器件的电路为1.3.2。
图中列出了2个常用电路。
双稳类电路这里我们将对555双稳电路工作方式进行总结、归纳。
555双稳电路可分成2种。
第一种(见图1)是触发电路,有双端输入(2.1.1)和单端输入(2.1.2)2个单元。
单端比较器(2.1.2)可以是6端固定,2段输入;也可是2端固定,6端输入。
第2种(见图2)是施密特触发电路,有最简单形式的(2.2.1)和输入端电阻调整偏置或在控制端(5)加控制电压VCT以改变阀值电压的(2.2.2)共2个单元电路。
LM555LM555C 时基电路
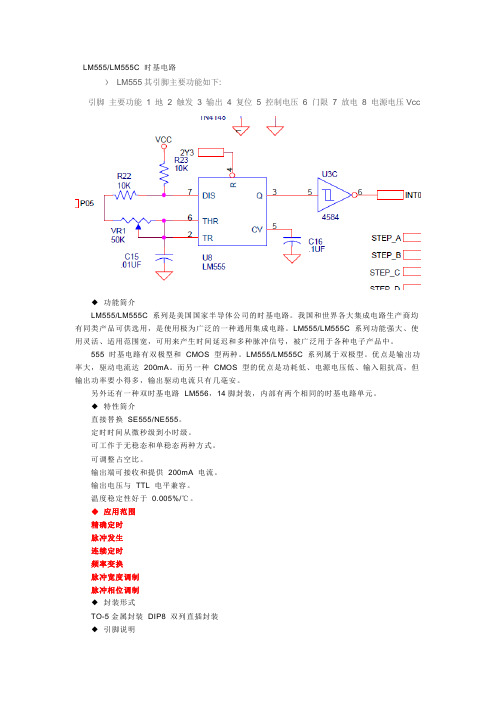
LM555/LM555C 时基电路)LM555其引脚主要功能如下:引脚主要功能 1 地 2 触发 3 输出 4 复位 5 控制电压 6 门限7 放电8 电源电压Vcc◆功能简介LM555/LM555C 系列是美国国家半导体公司的时基电路。
我国和世界各大集成电路生产商均有同类产品可供选用,是使用极为广泛的一种通用集成电路。
LM555/LM555C 系列功能强大、使用灵活、适用范围宽,可用来产生时间延迟和多种脉冲信号,被广泛用于各种电子产品中。
555 时基电路有双极型和CMOS 型两种。
LM555/LM555C 系列属于双极型。
优点是输出功率大,驱动电流达200mA。
而另一种CMOS 型的优点是功耗低、电源电压低、输入阻抗高,但输出功率要小得多,输出驱动电流只有几毫安。
另外还有一种双时基电路LM556,14脚封装,内部有两个相同的时基电路单元。
◆特性简介直接替换SE555/NE555。
定时时间从微秒级到小时级。
可工作于无稳态和单稳态两种方式。
可调整占空比。
输出端可接收和提供200mA 电流。
输出电压与TTL 电平兼容。
温度稳定性好于0.005%/℃。
◆应用范围精确定时脉冲发生连续定时频率变换脉冲宽度调制脉冲相位调制◆封装形式TO-5金属封装DIP8 双列直插封装◆引脚说明引脚编号符号功能说明1 GND 地线2 TR 触发3 OUT 输出4 RES 复位5 CV 控制电压6 TH 阀值7 DIS 放电8 VCC 电源◆代换电路以下各厂商的同型号电路均可直接代换。
国家半导体摩托罗拉德州仪器日电飞利浦日立西格尼蒂克LM555 MC1455 NE555 μPC1555 CA555 HA17555 SE555◆极限参数电源电压+18V耗散功率(注1)LM555H、LM555CH 760mWLM555N、LM555CN 1180mW工作温度范围LM555C 0℃至+70℃LM555 -55℃至+125℃存储温度范围-65℃至+150℃焊接信息双列直插封装(DIP)锡焊(10 秒)260℃小外形封装(SOP)汽相焊(60 秒)215℃红外焊(15 秒)220℃注1:对于运行在更高温度环境的器件必需降低额定值使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
把它 分为2个不 同单元 。不带 任何辅 助器件 的电路 为1 . 3. 1;使用 晶体管 、运放 放大器 等辅助 器件
的电 路为1 . 3. 2。图 中列出 了2个常 用电路 。
(点 击图可 以放大 )
C 、双稳 类电路
这里 我们将 对5 5 5双稳 电路工 作方式 进行总 结、归 纳。5 5 5双稳 电路可 分成 2种。 第一 种( 见图1)是触 发电路 ,有双 端输入(2 . 1. 1)和单 端输入(2 . 1. 2)2个单 元。单端 比较器 (2.1.2)可以是6端固定,2段输入;也可是2端固定,6端输入。 (点击图可以放大)
刚接通电源时,uc=0,u0=1。当 uc 升至
后,比较器 C1输出低电平( =0),基本 RS 触发器
置0,定时器输出 u0由1变为0。同时,三极管 T 导通,电容通过 R2放电,uc 下降。在
u< c<
期间,u0保持低电平状态。在 uc 下降至
以后,比较器 C2输出低电平( =0 ),使触发器置1,
它的 各个引 脚功能 如下: (点击 图可放 大) 1脚:GND(或 Vss)外接电源负端 VSS 或接地,一般情况下接地。 8脚:VCC(或 VDD)外接电源 VCC,双极型时基电路 VCC 的范围是4.5~16V,CMOS 型时基
电路 VCC 的范围为3~18V。一般用5V。 3脚:OUT(或 Vo)输出端。 2脚:TR 低触发端。 6脚:TH 高触发端。 4脚:R 是直接清零端。当 R 端接低电平,则时基电路不工作,此时不论 TR、TH 处于何
放电 至
所需 时间
555时基集成电路(555定时器芯片 )专题2--原理与应用 A 、5 5 5内部 电原理 图(点 击图可 以放大 )
(点 击图可 以放大 )
我们 知道,555电路 在应用 和工作 方式上 一般可 归纳为 3类。每类 工作方 式又有 很多个 不同的 电路 。
在实 际应用 中,除了 单一品 种的电 路外,还可 组合出 很多不 同电路 ,如:多个 单稳 、多个 双 稳、单稳 和无稳 ,双稳 和无稳 的组合 等。这样 一来 ,电路 变的更 加复杂。为了 便于我 们分析 和识 别电 路,更 好的理 解555电路 ,这里 我们这 里按555电路 的结构 特点进 行分类 和归纳 ,把 555电路
5 55 定时 器可以 说是模 拟电路 与数字 电路结 合的典 范。
两个比较器 C1和 C2各有一个输入端连接到三个电阻 R 组成的分压器上,比较器的输出接到
RS 触发器上。此外还有输出级和放电管。输出级的驱动电流可达200mA。 比较器 C1和 C2的参考电压分别为 UA 和 UB,根据 C1和 C2的另一个输入端——触发输入和阈
器的输出状态受比较器 C1、C2的输出端控制。
555 定时器的功能主要由两个比较器决定。两个比较器的输出电压控制 RS 触发器和放电管的状 态。在电源与地之间加上电压,当 5 脚悬空时,则电压比较器 C1 的同相输入端的电压为 2VCC /3,C2 的反相输入端的电压为 VCC /3。若触发输入端 TR 的电压小于 VCC /3,则比较器 C2 的 输出为 0,可使 RS 触发器置 1,使输出端 OUT=1。如果阈值输入端 TH 的电压大于 2VCC/3, 同时 TR 端的电压大于 VCC /3,则 C1 的输出为 0,C2 的输出为 1,可将 RS 触发器置 0,使 输出为 0 电平。
第2种( 见图2)是 施密 特触发 电路,有 最简单 形式的 (2 . 2. 1)和 输入端 电阻调 整偏置 或在控 制 端(5)加控制电压 VCT 以改变阀值电压的(2.2.2)共2个单元电路。 (点击图可以放大)
双稳 电路的 输入端 的输入 电压端 一般没 有定时 电阻和 定时电 容。这 是双稳 工作方 式的结 构特点 。 2.2.2单元电路中的 C1只起耦合作用,R1和 R2起直流偏置作用。 D 、无稳 类电路 第三 类是无 稳工作 方式。 无稳电 路就是 多谐振 荡电路 ,是5 5 5电路 中应用 最广的 一类。 电路的 变 化形 式也最 多。为 简单起 见,也 把它分 为三种 。
时,基本 RS 触发器复位,输出 u0=0。
同时,晶体管 T 导通,使电容 C 放电。此后 uc< 0 状态 。电路 将一直 处于这 一稳定 状态。
,若不加触发信号,即 u1>
,则 u0保持
(2)
暂稳 态
在 t=t1瞬间,2端输入一个负脉冲,即 u1<
,基本 RS 触发器置1,输出为高电平,并使晶体
555时基集成电路(555定时器芯片 )专题1--简介与工作原理
555 定时器是一种模拟和数字功能相结合的中规模集成器件。一般用双极性工艺制作的称为 555,用 CMOS 工艺制作的称为 7555,除单定时器外,还有对应的双定时器 556/7556。555 定 时器的电源电压范围宽,可在 4.5V~16V 工作,7555 可在 3~18V 工作,输出驱动电流约为 200mA,因而其输出可与 TTL、CMOS 或者模拟电路电平兼容。
电平 ,时基 电路输 出为“ 0” ,该 端不用 时应接 高电平 。 5脚:CO(或 VC)为控制电压端。若此端外接电压,则可改变内部两个比较器的基准电压,
当该端不用时,应将该端串入一只0.01μF 电容接地,以防引入干扰。 7脚:D 放电端。该端与放电管集电极相连,用做定时器时电容的放电。电阻分压器由
简介
555 定时器成本低,性能可靠,只需要外接几个电阻、电容,就可以实现多谐振荡器、单稳态触 发器 及施密 特触发 器等脉 冲产生 与变换 电路。它也 常作为 定时器 广泛应 用于仪 器仪表 、家用 电器、 电子测量及自动控制等方面。555 定时器的内部电路框图和外引脚排列图分别如图1 所示。它内 部包括两个电压比较器,三个等值串联电阻,一个 RS 触发器,一个放电管 T 及功率输出级。 它提供两个基准电压 VCC /3 和 2VCC /3 。
分为 3大类 、8种、共1 8个单 元电路 。每个 电路除 画出它 的标准 图型,指出 他们的 结构特 点或识 别 方法 外,还 给出了 计算公 式和他 们的用 途。方 便大家 识别、 分析5 5 5电路 。下面 将分别 介绍这 3 类电 路。
B 、单稳 类电路 单稳工作方式,它可分为3种。见图示。 (点击图可以放大) 第1种( 图1)是人工 启动单 稳 ,又 因为定 时电阻 定时电 容位置 不同而 分为2个不 同的单 元,并 分 别以1.1.1 和1.1.2为代号。他们的输入端的形式,也就是电路的结构特点是:“RT-6.2-CT”和 “C T -6 . 2- R T” 。
三个5kΩ的等值电阻串联而成。电阻分压器为比较器 C1、C2提供参考电压,比较器 C1的参考电 压为2/3Vcc,加在同相输入端,比较器 C2的参考电压为1/3Vcc,加在反相输入端。比较器由两 个结构相同的集成运放 C1、C2组成。高电平触发信号加在 C1的反相输入端,与同相输入端的参 考电压比较后,其结果作为基本 RS 触发器 R 端的输入信号;低电平触发信号加在 C2的同相输入 端,与反相输入端的参考电压比较后,其结果作为基本 RS 触发器 S 端的输入信号。基本 RS 触发
管 T 截止,电路进入暂稳态。此后,电源又经 R 向 C 充电,充电时间,触发负脉冲消失(u1> 持原 状态, u0仍为 高电平 。
),若 uc<
,则 =1, =1,基本 RS 触发器保
在 t=t3时刻,当 uc 上升略高于
时, =0, =1,基本 RS 触发器复位,输出 u0=0,
回到初始稳态。同时,晶体管 T 导通,电容 C 通过 T 迅速放电直至 uc 为0。这时 =1, =1,
电路 为下次 翻转做 好了准 备。 输出脉冲宽度 tp 为暂稳态的持续时间,即电容 C 的电压从0充至 = (1- )得
所需 的时间 。由
(9-4)
由上 式可知 : ① 改变 R、C 的值,可改变输出脉冲宽度,从而可以用于定时控制。 ② 在 R、C 的值一定时,输出脉冲的幅度和宽度是一定的,利用这一特性可对边沿不陡、幅 度不 齐的波 形进行 整形。
单稳态触发器电路的构成形式很多。图3(a)所示为用555定时器构成的单稳态触发器,R、C 为外 接元件,触发脉冲 u1由2端输入。5端不用时一般通过0.01uF 电容接地,以防干扰。下面对照图 3 ( b)进行 分析。
图3 单稳态触发器
(1)
稳态
接通电源后, 经 R 给电容 C 充电,当 uc 上升到大于
值输入,可判断出 RS 触发器的输出状态。当复位端为低电平时,RS 触发器被强制复位。若无需 复位 操作, 复位端 应接高 电平。 应用 5 5 5的应 用:
(1)构成施密特触发器,用于 TTL 系统的接口,整形电路或脉冲鉴幅等; (2 )构 成多谐 振荡器 ,组成 信号产 生电路 ;
如右 图2,
振荡周期: T=0.7(R1+2R2)C (3 )构 成单稳 态触发 器,用 于定时 延时整 形及一 些定时 开关中 。 5 55 应用 电路采 用这3 种方 式中的1 种或 多种组 合起来 可以组 成各种 实用的 电子电 路,如 定时 器、 分频器 、脉冲 信号发 生器、 元件参 数和电 路检测 电路、 玩具游 戏机电 路、音 响告警 电路、电 源交 换电路 、频率 变换电 路、自 动控制 电路等 。
第2种(图2)是脉冲 启动型 单稳 ,也可 以分为 2个不 同的单 元。他们 的输入 特点都 是“ R T -7 . 6- C T”,
都是从2端输入。1.2.1电路的2端不带任何元件,具有最简单的形式;1.2.2电路则带有一个 RC
微分 电路。
(点 击图可 以放大 )
第3种( 图3)是压控 振荡器 。单稳 型压控 振荡器 电路有 很多 ,都比 较复杂 。为简 单起见,我们 只
输出 u0由0变为1。同时三极管 T 截止,于是电容 C 再次被充电。如此不断重复上述过程,多谐振