PLC增加CANopen通讯能力的方法
汇川PLC在CAN通讯的介绍
H1U/H2U系列PLC在CAN通信的介绍编辑: iris 创建时间: 2011年02月24日概述H1U/H2U系列PLC,在PLC主模块上加上CAN通讯卡后具有CAN通讯功能。
可支持自由CAN 通信指令。
可支持远程模块访问指令FROM/TO,同时支持CAN-LINK网络功能。
CAN-LINK是汇川控制技术公司开发的基于CAN总线的网络协议,该协议是一个开放的协议,支持该协议的设备均可接入CAN-LINK网络。
H1U/H2U系列PLC及其远程扩展模块均可以支持CAN-LINK协议,CAN-LINK组网设备数量最大可达64台。
关键词:CAN-LINK,H2U远程扩展1.CAN-LINK网络CAN-LINK应用网络示意图:1.1 硬件接口H1U/H2UCAN扩展卡接口定义:CAN-LINK接口引脚定义:组成CAN-LINK网络时,所有设备的以上五根线均要一一对应连载一起,并且+24Vcc和0V需要外接24V直流电源。
总线的两端均要加120欧姆的CAN总线匹配电阻。
CAN-LINK接线图如下图所示:H1U/H2U远程扩展卡和CAN接口卡均内置了匹配电阻,可通过拨码开关接入或断开。
若改变拨码开关,除匹配电阻外,波特率和地址并不能立即生效,需要给系统重新上电才能使用新的设置参数。
1.2 CAN-LINK软件设置系统通过一下步骤完成CAN-LINK的配置一、通过AUTOSHOP完成CAN-LINK网络组态,定义需要叫唤的数据。
二、把配置信息下载到H1U或H2U系列的PLC中三、所有PLC等可编程设备均要启动CAN-LINK网络功能,若非特殊说明,H1U/H2系列扩展模块默认是启用CAN-LINK功能的,不需要特殊的设置。
并且,在有CAN-LINK配置的PLC中,需要通过用户程序启动CAN-LINK配置。
1.3 CAN-LINK网站组态CAN-LINK网络组态有两种方式,绘图时、填表式或指令编写。
绘图式比较直观,填表式则比较简单,指令编写即需要用户程序启动CANTX编写满足CAN-LINK配置帧的用户程序,以下简单介绍一下绘图式,更详细的操作请参见AUTOSHOP软件使用说明。
台达PLC通讯控制伺服教程
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
-
台达PLC以Canopen控制伺服
在线描硬件,
ቤተ መጻሕፍቲ ባይዱSDO自动配置
-
SDO配置内容
-
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
-
决对定位伺服软件设置: (决对定位路径1设置) 1;选择到路径10 2;选TYPE路径型式 3;选位置命令终点 4;选运行速度(选择PLC-PDO配置运行速度P5-75) 5;显示外部给定目标位置
-
-
-
定位控制时P6-03为位置来源
-
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
CANopen模块

针对SIMATIC S7-1200 PLC的CANopen主站/从站模块CM CANopen能够令您联接任意CANopen或CAN 2.0A设备到您的SIMATIC S7-1200 PLC。
该模块插入您的S7-1200并作为CANopen/CAN设备与微型PLC之间的桥梁。
这就允许您在设计系统时可从一系列自动化产品中做选择。
支持CANopen与CAN 2.0A简单添加CM CANopen扩展模块到SIMATIC S7-1200 PLC,任意运行CANopen协议或任意自定义的基于CAN 2.0A协议的设备都可联接。
一旦添加到S7-1200,您就可以从TIA Portal建立CM CANopen模块。
您的CANopen网络配置就可在附带的Configuration Studio软件中完成。
CM CANopen模块从TIA Portal既可配置成主站也可配置成从站。
无需编程来生成配置。
CM CANopen模块从2013年6月起有货- 联系HMS获得更多信息!概览TIA Portal配置CANopen配置CANopen/CAN特点技术快速启动CM CANopen模块为直接插入SIMATIC S7-1200 PLC上而设计。
该模块通过基架总线交换数据与信号,基架总线同时为模块供电。
简易四步令您启动并快速运行!1. 添加CM CANopen模块到S7-1200 PLC2. 从TIA Portal下载并安装HSP配置文件CM CANopen特点针对SIMATIC S7-1200 PLC的即插式CANopen主站/从站模块主站模式下联接多达16个CANopen从站节点每个模块256字节输入与256字节输出每个CPU可连接多达3个模块LEDs提供模块、网络与I/O状态的诊断信息支持PLC(PLC1214系列及以上)中CANopen网络配置的存储集成在TIA Portal配置包中的硬件目录中支持针对自定义协议实施的透明CAN2.0A通过附带的CANopen Configuration Studio软件进行CANopen配置预制功能模块可用于TIA Portal中的简单PLC编程符合CANopen通信规范CiA 301 rev.4.2与CiA 302 rev.4.1。
PLC高级应用技术,PLC与变频器的CANopen总线通讯控制之线路介绍
PLC高级应用技术,PLC与变频器的CANopen总线通讯控制之线路介绍上篇文章PLC(可编程控制器)和变频器怎样连接?向大家讲解了PLC控制变频器的三种方式,对于硬接线的方式,初学者很好理解,对于总线通讯,可能理解起来就比较麻烦,今天就跟大家讲解一下PLC和变频器的总线通讯。
就以CANopen总线为例。
CANopen总线是一种常用的现场总线,在嵌入式系统中非常常见,施耐德电气,伦茨伺服,翠欧运动控制器等等默认支持的总线就是CANopen总线。
需要注意的是,总线通讯是高级功能,一般的PLC和变频器是不支持的,基本上是中等以上的产品才支持。
一般都是驱动器数量比较多或是位置比较分散的场合使用。
此种应用场合是不适宜使用模拟量的。
对于采用通讯控制的机械设备或是大型生产线,它的维护比用模拟量的要复杂,因为模拟量你可以方便的用万用表测量,而通讯就不行了,线路是否畅通,和通讯是否成功没有必然关系。
通讯线路畅通,通讯不一定畅通。
这对维修电工提出了更高的要求,因此掌握通讯的基本原理和实现方法,已经成了现场维修电工的基本技能,如果你还是灯泡电工那一套,迟早要被淘汰。
(*欢迎关注头条号‘譬如朝露’,本小编所有文章只发布于本头条号下。
其他平台出现,比如电工学习网,百家号,搜狐号,贴吧,新浪博客,东方头条,快资讯等等等等等,均为抄袭*)其实对于现场维护的维修电工来说,总线通讯的线路检查是非常之重要的,因此,在讲解CANopen总线通讯之前,先要详细了解一下CANopen的接线。
1 信号对应关系CANopen总线需要三根信号线,分别是CAN_H ,CAN_L,GND。
PLC侧和变频器侧一一对应即可。
和西门子的DP总线不同,CANopen总线需要三根线,因为DP 总线没有GND线。
需要注意的是,CAN_H CAN_L 一定要用双绞线。
在标准CANopen线缆中,一般是白色和蓝色,而且线缆的屏蔽层一定要接地,和强电线缆(主要是380V)保持一定的距离。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
关于CANopen通讯模块的使用方法
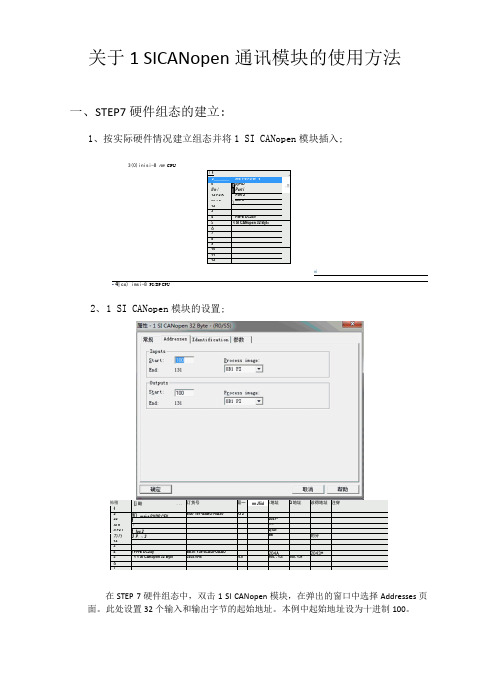
关于1 SICANopen通讯模块的使用方法一、STEP7硬件组态的建立:1、按实际硬件情况建立组态并将1 SI CANopen模块插入;3(0)inisi-8 nm CPU「1A2 ________ ms 1-8 P9/W "VIl n /irIFpjr-iDPert i,三12 P2 K Fort 2X1 P3\Are 31234PM-E DC24V5| 1 SI CANopen 32 Byt<6789101112ni- 4| co) imsi-8 PS/DP CPU怖稽[j 酸...订货号固一nn Jfiid i地址Q地址诊得地址注穿12即msi-s P9/DP CFV6IS7 151-GABO1-0A90Y3 22212047^Xi n *I*/冢如Il P2 l 1 foe 22(X5/力乃J P。
八3aw*的分1234y PH-E DC24y BEST 138-4CAOI-OAAO204A2043*5 1 1 SI CAKopon 32 Byte020570-B VI.0100. . 13!100. 13167在STEP 7硬件组态中,双击1 SI CANopen模块,在弹出的窗口中选择Addresses页面。
此处设置32个输入和输出字节的起始地址。
本例中起始地址设为十进制100。
2、1 SI CANopen模块的设置;在性-1 SI CANopen 32 Byte - (R0/S5)常规Addresses | Identification确定选择“参数”页面,设置“Baudrate”以及input/output data size,如上图所示。
PS:理论上Process data mode因为本次传输数据在32 Byte内,可选择Standard模式,但不知道为什么会报错,所以选择Fragmented模式。
双击STEP 7硬件组态中的CPU,选择“周期/时钟存储器”,修改过程映像输入/输出区的大小。
TM258与ATV312通过Canopen通讯
【远程组态】(2 线控制)端子控制 正反转、导航按钮
给定频率
【远程组态】(3 线控制)端子控 制正反转、导航 按钮给定频率
【本地组态】由 内部给定值控
制
【modbus】 modbus 控制正 反转、modbus 给
定频率
序号
代码
说明
变频器
变频器
变频器
变频器
变频器
初始化变频参 1 CTL-FCS-INI
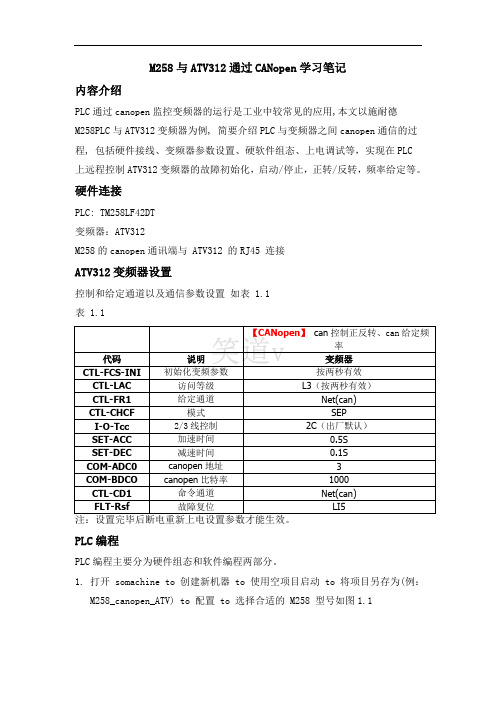
M258 与 ATV312 通过 CANopen 学习笔记
内容介绍
PLC 通过 canopen 监控变频器的运行是工业中较常见的应用,本文以施耐德 M258PLC 与 ATV312 变频器为例, 简要介绍 PLC 与变频器之间 canopen 通信的过 程, 包括硬件接线、变频器参数设置、硬软件组态、上电调试等,实现在 PLC 上远程控制 ATV312 变频器的故障初始化,启动/停止,正转/反转,频率给定等。
硬件连接
PLC: TM258LF42DT 变频器:ATV312 M258 的 canopen 通讯端与 ATV312 的 RJ45 连接
ATV312 变频器设置
控制和给定通道以及通信参数设置 如表 1.1
表 1.1
【CANopen】 can 控制正反转、can 给定频
率
代码
说明
变频器
CTL-FCS-INI 初始化变频参数
CTL-CD1
命令通道
Net(can)
FLT-Rsf
故障复位
LI5
注:设置完毕后断电重新上电设置参数才能生效。
PLC 编程
PLC 编程主要分为硬件组态和软件编程两部分。 1. 打开 somachine to 创建新机器 to 使用空项目启动 to 将项目另存为(例:
S7-1500 通过CANopen与RFID通信
S7-1500 通过CANopen与RFID通信简介本文档介绍了如何使用S7-1500 PLC通过CANopen协议与RFID设备进行通信。
CANopen是一种基于CAN总线的通信协议,用于实现不同设备之间的数据交换。
RFID(Radio Frequency Identification)是一种无线通信技术,用于识别和追踪标签上的信息。
S7-1500与CANopen通信配置1. 首先,确保S7-1500 PLC上安装了适配器模块,用于支持CANopen通信。
2. 连接适配器模块与CAN总线进行通信。
3. 在TIA Portal软件中创建S7-1500的配置,配置适配器模块以及CANopen通信参数。
RFID设备与CANopen通信配置1. 确保RFID设备支持CANopen协议,并具备相应的接口。
2. 连接RFID设备与CAN总线进行通信。
3. 配置RFID设备的CANopen通信参数,设置设备的标识符、数据长度等信息。
S7-1500与RFID通信实现1. 在TIA Portal软件中创建S7-1500的程序,实现与RFID设备的通信逻辑。
2. 使用适配器模块提供的函数块,进行CANopen通信的数据交换。
3. 根据RFID设备的通信协议,发送命令并接收数据。
示例代码下面是一个简单的示例代码片段,演示了S7-1500 PLC如何通过CANopen协议与RFID设备通信。
VARrfidData: ARRAY[0..7] OF BYTE; // 存储从RFID设备读取的数据rfidStatus: BOOL; // RFID设备状态END_VARNETWORK// 读取RFID设备的数据CALL ReadRFIDData(rfidData, rfidStatus);// 处理RFID设备的数据IF rfidStatus THEN// 数据有效,进行相应的操作ELSE// 数据无效,进行错误处理END_IFEND_NETWORK总结通过以上步骤和示例代码,我们可以实现S7-1500 PLC与RFID设备之间的CANopen通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC增加CANopen通讯能力的方法
文档版本:2018/2/1
PLC增加CANopen通讯能力的方法一、写作背景
目前在工业上,使用PLC控制的场合越来越多。
PLC具有可靠性高、适用性强、易学易用、体积小、重量轻、能耗低等优点,在工业控制领域中被广泛使用。
目前市面上比较常见的PLC是西门子S7-200(图1)和西门子S7-300(图2)等。
这些PLC一般只具有RS232/RS485或以太网接口,并且使用Modbus协议进行通信。
但是随着时代的发展,越来越多的从站设备附带了CANopen协议,例如:伺服控制器(图3)、变频器(图4)、CANopen远程I/O(图5)、传感器(图6)。
这样就造成不支持CANopen协议的PLC与CANopen协议从站设备之间无法建立通信。
图1 西门子S7-200
图2 西门子S7-300
图3支持CANopen通信的伺服控制器伺服控制器
图4支持CANopen通信的变频器
图5 CANopen远程I/O
图6支持CANopen通信的传感器
二、解决问题的方法
1. 直接购买带CANopen通信的PLC
此种方法必须使用新的PLC替换原有的,不但需要对新的PLC重新开发编程还会造成成本升高的问题。
2. 外接CANopen转换模块
此种方法非常灵活,转换模块可以按需定制,在不改变原有PLC的硬件结构的前提下外加一个CANopen通信模块,即可实现使用CANopen协议通信。
这里我们以西门子PLC为例说明如何使用外接CANopen转换模块的方式,将PLC扩展出CANopen通信接口。
具体结构如下图7拓扑结构图所示。
图7 拓扑结构图
1、设备说明
沈阳广成科技GCAN-303/304型号分别是Modbus RTU/TCP转CANopen主站模块,用户可以根据自己PLC的实际情况选择对应的模块与PLC搭配实现CANopen通信能力。
2、配置
沈阳广成科技的GCAN-303/304只需要使用简单的配置软件完成参数配置,就可以正常使用,图8是GCAN-303/304的配置界面截图。
图8 GCAN-303/304的配置界面
“CAN波特率”——可配置10K、20K、50K、100K、125K、250K、500K、1M。
“节点地址”——可设置范围1~127。
“NMT管理使能”——是否开启NMT功能选择。
选择“是”,表示启动网络上的所有CANopen节点,默认为“否”。
“Control&Status使能”——是否开启“Control&Status”功能。
当设置为使能时,Modbus 主站可以通过GCAN-303/304模块获得各个CANopen从站的状态(操作状态、预操作状态、停止状态),同时也可以通过GCAN-303/304模块来改变所配置的CANopen从站的运行状态(复位从站,复位通信,以及改变从站的状态),即发送NMT控制命令。
“从站状态超时清零时间”——此设置在“Control&Status”为使能状态下有效,在使用“Control&Status”功能读取从站状态时,如果主站在此设置时间内没有收到从站发出的状态,将自动将其状态位清零,以表示从站已不存在。
“Guard Life Time”——如果设定为0值,表示使用heartbeat模式,如果设置为非0值,表示开启Guard Life模式,且时间为10ms的非0值整数倍,范围1~200。
例如:填写20,即Guard Life 时间为200ms。
“SYNC周期时间”——同步周期(时间值)= 0表示不使用同步周期功能,等于非0值
表示使用同步周期功能,且同步周期时间为10毫秒的非0值整数倍,范围0~200,默认值为0。
例如:填写20,即同步周期时间为200ms。
“TPDO超时清零时间”——设置TPDO超时清零功能,如果设置为0值,表示关闭“TPDO 超时清零”,如果设置为非0值,表示开启TPDO超时清零功能,且TPDO超时清零时间为10毫秒的非0值整数倍,范围0~200,默认值为0。
例如:填写20,即网关超过200毫秒还未收到某从站的TPDO,网关将把该从站TPDO对应的输入缓冲区清零。
“SDO超时响应”——CANopen的SDO访问超时设置,即参数读写访问命令的超时时间设置,以10ms为单位,范围1~200,默认值为200。
例如:填写20,即SDO超时响应时间为200ms。
如图9是Modbus端配置的截图,这里以GCAN-304为例。
图9 Modbus端配置的截图
3、接线实例
下面给大家演示西门子S7-200PLC与GCAN-303/304设备之间的接线,如下图10。
图10 西门子S7-200PLC与GCAN-303设备的接线
图中以PLC与GCAN-303为例,PLC与GCAN-303用导线进行连接,采用Modbus RTU协议,需要将两端的485A+与485B-进行连接,GCAN-303另一端接的是CANopen总线,只需接入CAN_L与CAN_H。
之后您需要在PLC中添加Modbus主站程序,再按照再按照GCAN-303使用说明书进行配置,即可通过调取/填充Modbus端寄存器数值的方式与CANopen总线进行通信。
三、总结
综上所述,使用广成科技GCAN-303/304模块可以非常简单的实现Modbus信号与CANopen信号的转换。
搭配GCAN-303/304模块,具有Modbus通信能力的PC、工控机、PLC、伺服驱动器、变频器等设备可以轻松扩展出CANopen接口,帮助客户减少开发成本节约时间,快速抢占市场先机。