creo3.0机构动画运动仿真
CREO 机构的运动仿真与分析

仿真过程详解
导入模型:将CREO模型导入到仿真软 件中
分析结果:分析仿真结果如位移、速 度、加速度等
设置参数:设置仿真参数如时间、速 度、加速度等
优化设计:根据仿真结果对模型进行 优化设计
优化方案与实施
优化目标:提高机构运动效率降低能耗 优化方案:采用CREO机构的运动仿真与分析技术 实施步骤:建立模型、仿真分析、优化设计、验证测试 实施效果:提高机构运动效率降低能耗提高产品性能
06
结论与展望
总结CREO机构的优势与不足
优势:强大的建模功能支持多种格式的导入和导出 优势:高效的仿真分析功能能够快速准确地模拟机构运动 不足:对复杂机构的处理能力有限需要更多的优化和改进 不足:用户界面不够友好需要更多的用户反馈和改进
运行仿真
导入模型:将CREO模型导入到仿 真软件中
定义材料属性:为模型定义合适的 材料属性
添加约束:为模型添加适当的约束 条件
添加载荷:为模型添加适当的载荷 条件
运行仿真:运行仿真观察模型的运 动情况
分析结果:分析仿真结果得出结论
04
分析方法与工具
运动学分析
运动学方程: 描述物体运动
的数学模型
添加标题
添加标题
动力学分析应用:优化设计、故 障诊断、性能评估等
疲劳分析
疲劳分析的目的: 预测产品在使用 过程中的疲劳寿 命
疲劳分析的方法: 有限元分析 (FE)、实验测 试等
疲劳分析的工具 :CREO Simulte 、NSYS等
疲劳分析的步骤 :建立模型、施 加载荷、求解、 分析结果等
如何在ProE-Creo中实现三维动画效果

如何在ProE-Creo中实现三维动画效果
如何在ProE-Creo中实现三维动画效果
如何在ProE Creo中实现三维动画效果?
2摘要: 在日常工作中,我们常常要做些机构来分析产品的包络,或向客户展示我们的产品。
在这些情况下,我们都用到ProE Creo中的三维运动模块。
在ProE Creo中,有两个模块可以实现三维动画效果:一个是机构仿真,主要用于机构 ...
在日常工作中,我们常常要做些机构来分析产品的包络,或向客户展示我们的产品。
在这些情况下,我们都用到ProE Creo中的三维运动模块。
在ProE Creo中,有两个模块可以实现三维动画效果:一个是机构仿真,主要用于机构的受力分析,另一个是动画,主要用于产品的展示。
这里我们以Creo中的动画模块环境,向大家简单介绍下动画模块的使用
方法。
以下我用一个简单的针筒实例来分享下具体使用方法:
首先,打开我们做动画的产品,选择应用程序下的动画模块。
进入动画环境后,首先选择“新建动画”下的“快照“,接着“定义主体”,然后在主体对话框内选择“每个主体一个零件”。
这样做的目地是为了使每个零件
之间具有相对运动的条件。
接着,我们为动画创立关键帧所需要的快照,此个案例,我们只需要三个动作就能完成针筒的组装,分别是组装活塞,组装推杆,组装针头盖。
(此处要注意调
节好装配的顺序)
接着,我们就为关键帧设置时间节点:
为了更直观的表现装配效果,我们还可以在活塞的组装过程中,使针筒透明化。
此时就要用到“定时透明”功能
最后,我们只需要单击屏幕上方的“生成并运行动画”按键即可观看动画效果。
最终效果如下:。
CREO 3.0 装配和机构仿真教程

装配和机构仿真教程
新建装配件
注意:应使用公制模板
抓取当前屏幕
加入组件及 创建组件 设置 模型树 显示
装 配 的 界 面
装配坐标系 及平面
第一个组件的装配
加入组件
打开相应零件或组件
对 齐 结 果
在“元件放 置”窗口中
打开第一 个组件
选组件直 接对齐装 配坐标系
重合约束
约束两个装配元件的面与面、线与 线、线与点、面与点、线与面、坐标以 及点与点间的重合。其中,最常用的是 面与面的重合以及线与线的重合,如把 轴插入孔里时,用两轴线的重合即可。
面与面同向重合
面与面异向重合
轴与孔面的重合
回转 曲面
回转曲面同轴
其它约束条件
“法向”约束:定义两元件中的直线或平面相互 垂直。 “共面”约束:使两元件中的两条直线或轴在同 一个面内。 “居中”约束:控制两元件的坐标原点重合,但 坐标轴不重合。 “相切”约束:控制两曲面相切。 “固定”约束:可以把元件固定在当前位置。 “默认”约束:使元件的默认坐标系与装配环境 的默认坐标系重合。第一个元件一般用此方式。
电动机的模:SCCA
• 它称做“正弦-常数-余弦-加速度”运动,缩写为SCCA。 它一共有五个参数: A = 渐增加速度归一化时间部分 B = 恒定加速度归一化时间部分 C = 递减加速度的归一化时间部分 H = 幅值 T = 周期 其中A + B + C = 1,用户必须提供 A 和 B 的值、幅值和 周期。
在机构中,对各个连接可加入多个 电机,并设置运行的时间段。
自由弹跳的小球
在机构中,小球和 圆弧是凸轮连接, 且e>=0。 小球使用 槽连接完 成装配。
基于PTC Creo 3.0的行星齿轮传动机构运动仿真
图7
4 定义设置齿轮连接 1)定义电动机太阳齿轮与第一级行星齿轮的齿轮连
接。将齿轮箱上下盖组件及第二级齿轮支架组件隐藏,打 开应用程序菜单,再打开下面的机构选项,再打开齿轮选 项,出现齿轮副定义菜单,在齿轮1下面运动轴选项中选 取电动机太阳齿轮的销连接,输入电动机太阳齿轮分度
架组件,在用户定义栏选销连接,在放置下拉选项轴对齐
图8
网址: 电邮:hrbengineer@ 圆园员8 年第 6 期
131
机械工程师
MECHANICAL ENGINEER
圆直径。点选齿轮2下面运动轴选项中第一级行星齿轮的 销连接,输入第一级行星齿轮分度圆直径,其它2个齿轮 同前面一样定义,如图8所示。
图3
130
圆园员8 年第 6 期 网址: 电邮:hrbengineer@
机械工程师
MECHANICAL ENGINEER
如图3所示。 2.3 定义第二级齿轮支架组件装配文件
建立装配图文件:第二级齿轮支架组件.asm,调入第 二级齿轮支架,在用户定义栏不变,在自动定义栏选默选 项将其定义。调入第二级行星齿轮,在用户定义栏选销连 接,在放置下拉选项轴对齐中将第二级行星齿轮轴与第 二级齿轮支架轴对齐重合。在放置下拉选项平移中将第 二级行星齿轮端面与第二级齿轮支架平面重合。即定义 好第二级行星齿轮,其它3个行星齿轮同前面一样定义, 如图4所示。
一级齿轮支架,在用户定义栏不变,在自动定义栏选默选
图2
项将其定义。调入第一级行星齿轮,在用户定义栏选销连 接,在放置下拉选项轴对齐中将第一级行星齿轮轴与第 一级齿轮支架轴对齐重合。在放置下拉选项平移中将第 一级行星齿轮端面与第一级齿轮支架平面重合。即定义 好第一级行星齿轮,其它2个行星齿轮同前面一样定义,
Creo运动仿真实例
参照下图,设计一万向连接传动机构,结构、尺寸 均自己设计确定,并装配、运动仿真、分析。
1、播放; 2、生成视频:在“播放”的“动画”窗口内,点“捕获”,输入“路 径”、文件名。
七、分析结果(测量):分析测量 1、新建“测量点”:测量点1(摇杆的位置)、测量点2(摇杆的速度)、 测量点3(摇杆的加速度); 2、按ctrl选多个测量点、复选“分别绘制”、选“结果集”中仿真分析名 称;
3、点左上角 “绘制”图标,再点“文件”——“输出EXCEL文件”。 八、绘制曲线
添加第2销钉); “应用”——“机构”,进入仿真界面 二、设置运动副(凸轮副、齿轮副) 三、设置电机
1、电机位置(类型):拾取“销钉运动副”; 2、电机大小(轮廓):速度、A为360 deg/sec。 四、调整:手形“拖动”图标,进行调整,“快照”确定当 前位置。
பைடு நூலகம்
五、分析
1、类型:运动学; 2、终止时间:1--3 sec; 3、桢频:100-200; 4、若有“快照” ,点“快照”,“运行”。 六、回放
(装配模块)
(机构运动 仿真模块)
(铰链)
(移动副) (丝杆螺母副)
(采用普通装配的方式进行约束) (垫片)
1、刚性:采用普 通装配的方式进行 约束;(自动)
2、焊接:采用坐 标系进行约束; (缺省)
SVA
四连杆机构
一、装配 1、机架(左):缺省方式; 2、机架(右):前面、底面对齐,右面相距120; 3、曲柄、连杆:销钉; 4、摇杆:两个销钉(在“放置”页左下点“新设置”,
creo3.0怎么制作装配动画?creo3.0装配体动画的制作方法
creo3.0怎么制作装配动画?creo3.0装配体动画的制作⽅法
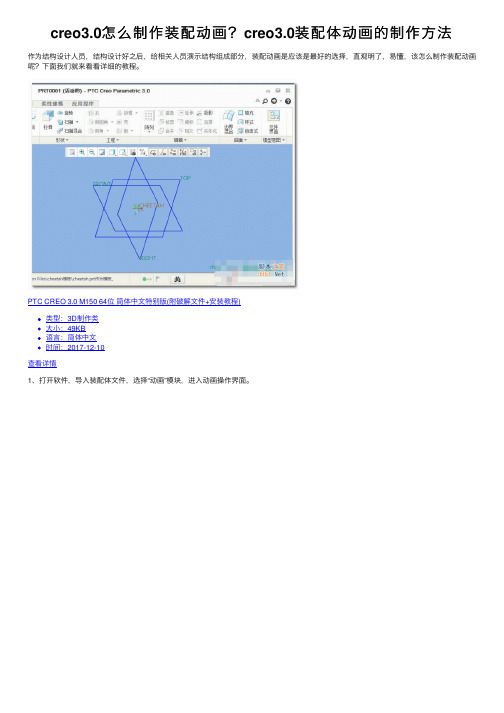
作为结构设计⼈员,结构设计好之后,给相关⼈员演⽰结构组成部分,装配动画是应该是最好的选择,直观明了,易懂,该怎么制作装配动画呢?下⾯我们就来看看详细的教程。
PTC CREO 3.0 M150 64位简体中⽂特别版(附破解⽂件+安装教程)
类型:3D制作类
⼤⼩:49KB
语⾔:简体中⽂
时间:2017-12-10
查看详情
1、打开软件,导⼊装配体⽂件,选择“动画”模块,进⼊动画操作界⾯。
2、单击“新建动画->快照”菜单,在弹出的对话框中输⼊名称,单击确定。
3、按“主体定义”,在弹出的对话框中按“每个主体⼀个零件”,按关闭。
4、单击“关键帧序列”,进⼊关键帧序列对话框,单击序列下的关键帧快照图标,进⼊快照界⾯,把下⽅的⾼级拖动选项展开,主要为X、Y、Z轴的的平移和旋转作业,便于后续操作。
5、选择X、Y、Z轴的的平移和旋转操作(单选),在所需的零件上单击,达到作业⽬的,然后单击⼀次快照图标,每操作⼀次或⼏次(取决于动画的精细度),单击⼀次快照,重复操作,取多次快照,然后关闭。
开始多长时间出现,为之前的快照排序。
7、每切换⼀次快照,填⼊⼊时间,并按⼀下右侧的“+”,底部的插值选择“平滑,最后点确认。
8、单击”创建“,然后按”回放“,就可以看到动作跑起来了。
以上就是Creo3.0装配体动画的制作⽅法,希望⼤家喜欢,请继续关注。
Creo 3.0 动画制作教程
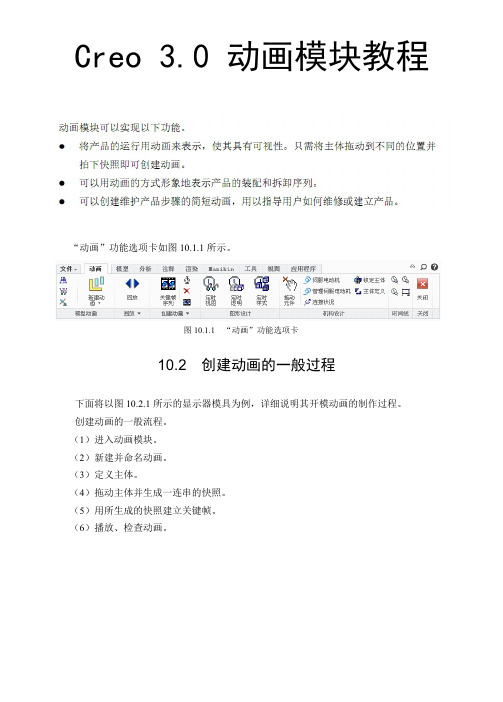
Creo 3.0 动画模块教程“动画”功能选项卡如图10.1.1所示。
10.2 创建动画的一般过程下面将以图10.2.1所示的显示器模具为例,详细说明其开模动画的制作过程。
创建动画的一般流程。
(1)进入动画模块。
(2)新建并命名动画。
(3)定义主体。
(4)拖动主体并生成一连串的快照。
(5)用所生成的快照建立关键帧。
(6)播放、检查动画。
图10.1.1“动画”功能选项卡(7)保存动画文件。
10.2.1 进入动画模块Step1. 将工作目录设置至D : \creo3.2\work\ch10.02;打开文件display_mold.asm (注意:要进入动画模块,必须在装配模块中进行)。
Step2. 单击功能选项卡区域中的“动画”按钮,系统进入“动画”模块,界面如图10.2.2所示。
图10.2.1 显示器模具上模(具)滑块下模(具)设计件图10.2.2“动画”模块界面10.2.2 创建动画Step1. 定义一个主动画。
(1) 选择功能选项卡中的命令,系统弹出图10.2.3所示的“定义动画”对话框。
(2)在对话框中输入动画名称display_mold_open ,然后单击按钮,关闭对话框。
Step2. 定义基体和主体。
(1)单击功能选项卡区域中的“主体定义”按钮,系统弹出图10.2.4所示的“主体”对话框(一)。
(2)单击对话框中的按钮,系统将所有零件作为主体加入主体列表中,如图10.2.5所示。
(3)选取图10.2.5所示的对话框中的Ground ,单击按钮,系统弹出“主体定义”对话框(图10.2.6)及“选择”对话框。
(4)定义作为Ground (基体)的零件。
在模型树中选取,然后单击“选择”对话框中的按钮,再单击图10.2.6所示的“主体定义”对话框中的按钮。
完成后,“主体”对话框如图10.2.7所示。
(5)单击“主体”对话框中的按钮。
Step3.创建快照。
单击功能选项卡区域中的“拖动元件”按钮图,10.2.3“定义动画”对话框图10.2.4 “主体”对话框(一)图10.2.5 “主体”对话框(二)图10.2.6 “主体定义”对话框系统弹出图10.2.8所示的“拖动”对话框,该对话框中有两个选项卡──和,在选项卡中可移动主体并拍取快照,在选项卡中可设置主体间的约束。
基于Creo 3.0的电子驻车链条和链轮传动机构的运动仿真

基于Creo3.0的电子驻车链条和链轮传动机构的运动仿真余乐乐,温开元(浙江瑞立集团技术中心新能源开发部,浙江瑞安325200)摘要:为了直观地模拟链条和链轮传动机构运动,从而发现设计过程中存在的问题,利用三维软件C r e o3.0建立链条传动的各个零件的.a s m装配图,对链条和链轮传动机构进行了运动仿真分析。
关键词:三维软件C r e o;链条传动;机构运动仿真中图分类号:TH132.45文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员8)08原园088原园4 Motion Simulation of E-parking Chain and Sprocket Transmission MechanismBased on Creo3.0YU Lele,WEN Kaiyuan(New Energy Development Department,Zhejiang Ruili Group Technology Center,Ruian325200,China) Abstract:In order to visually simulate the movement of the chain and sprocket drive mechanism to discover the problems in the design process,the.asm assembly diagram of each part of the chain drive is established using the three-dimensional software Creo.The chain and sprocket transmission mechanism is simulated by the motion simulation analysis.Keywords:3D software Creo;chain transmission;mechanism motion simulation1建立链条传动的各个零件1)建立链条运动轨迹零件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
销钉连接
注:即允许绕着指定的轴进行旋转和平移的连接,共2个 自由度.
3
圆柱连接
© 2006 PTC
连接类型
滑动杆连接 mdo\connections\slider
轴对齐/插入曲面 平面匹配/对齐或点对齐(轴向) 注:即允许沿着指定的轴进行平移的连接 总共1个自由度.
平面连接 mdo\connections\plane
10
© 2006 PTC
连接轴设置
选取 参照
对销钉连接轴 设置初始位置
可设置运 动的范围
动态属性
11
© 2006 PTC
连接轴设置
连接轴运动到约束位置时,可使 用定义的还原系数仿真冲击力, 也称恢复系数.
12
© 2006 PTC
高级连接类型
高级连接类型包括: 槽连接、凸轮连接、齿轮连接
槽连接与凸轮连接的对比
凸轮从动机构连接。 3、可以再拖拽操作中使用凸轮连接。 4、凸轮连接不能防止凸轮倾斜,必须对
某一元件定义附加连接副,防 止倾斜。
运动中发生倾斜
29
© 2006 PTC
槽连接
30
© 2006 PTC
槽连接
31
© 2006 PTC
槽连接
32
© 2006 PTC
槽连接范例
设置工作目录到机构运动仿真 \connections\solt目录下.
取消钩选
20
© 2006 PTC
凸轮连接的范例
1装配第一个零件cam_frame.prt >cam_frame.prt > 缺省
2装配第二个零件cam.prt
>cam.prt
1
2采用销 钉连接
21
3选取A_2轴
4选取A_3轴
© 2006 PTC
凸轮连接的范例
5选取平面
6选取平面
3装配第三个零件follower.prt
动态图元 关于力/扭矩 力/扭矩定义
43
© 2006 PTC
动态图元
44
© 2006 PTC
机构分析与测量 机构分析
分析 回放分析 测量
45
© 2006 PTC
机构分析
46
© 2006 PTC
机构分析
47
© 2006 PTC
机构分析
48
© 2006 PTC
机构分析
关于力平衡分析
力平衡分析可求出要是机构在特定形态中保持固定不动所需的力.
力平衡
•位置 (Position) •连接反作用 •净负荷 •测力计 •所有系统测量 •所有主体测量
位置
•位置 (Position) •间隔(距离) •自由度 •冗余 •时间 •主体角加速度
© 2006 PTC
运动空间 主参照 次参照
凸轮 2D 曲线/曲面 曲线/曲面
槽 2D/3D 曲线/曲面
点
13
© 2006 PTC
高级连接类型
凸轮连接:采用凸轮连接,当元件cam旋转时,从动元件follower 跟随一起运动.
运动
cam
Follower
14
© 2006 PTC
凸轮连接
需要注意: A.所选曲面只能是单向弯曲曲面(如拉伸曲面), 不能是多向弯曲曲面(如旋转出来的鼓形曲面)。
定义齿轮 副属性
35
© 2006 PTC
齿轮连接范例
Large_gear.prt
Small_gear.prt
机构仿真
Gear_base.prt
操作演示
36
© 2006 PTC
动态图元
动态图元:包括伺服电机、执行电机、弹簧、重力、阻尼、力\扭矩、
定义伺服电机
定义重力 定义执行电机 定义弹簧 定义阻尼器 定义力/扭矩
D.当钩上附选框中的自动选取后,选取曲 面时将自动将与之相切相邻的所有选上 ,如果曲面间不相切,将无法选取.
自动选取
E.可以选取平面作为凸轮曲面,但需要指平面的深度的参照.
深度参照
17
© 2006 PTC
凸轮连接
凸轮的属性
开始
18
未启动升离 启动升离
恢复系数
静摩擦系数 动摩擦系数
© 2006 PTC
“轴承”不同,它是元件(或组件)上 的一个点对齐到组件(或元件)上的一条直边或轴线 上,因此元件可沿轴线平移并任意方向旋转,具有1 个平移自由度和3个旋转自由度,总自由度为4
球连接 轴承连接
6
© 2006 PTC
连接类型 常规连接
其自由度也是不固定的,视定义的方式,可能拥有各种自由度.
>follower.prt
1
2采用销 钉连接
22
7完成结果
© 2006 PTC
凸轮连接的范例
3选取A_2轴
4选取A_4轴
7完成结果
6选取此平面
23
5选取此平面
© 2006 PTC
凸轮连接的范例
4通过拖拽调整与元件位置
5进入机构模块 应用程序>机构
24
© 2006 PTC
凸轮连接的范例
1进入机
2
刚性连接
使用一个或多个基本约束,将元件与组件连接到一起。连接后,元件与 组件成为一个主体,相互之间不再有自由度。如果将一个子组件与组件 用刚性连接,子组件内各零件也将一起被“粘”住,其原有自由度不起作 用。总自由度为0。
5
© 2006 PTC
连接类型 球连接
点与点对齐 注:即允许绕着任意方向旋转的连接,总3个自由度
© 2006 PTC
动态图元
关于弹簧
使用弹簧可以在机构中定义线性弹力, 可在拉伸、压缩过程中产生线性弹力。 可通过选取轴或点与点来创建弹簧。
弹簧定义
40
© 2006 PTC
动态图元 关于阻尼器
41
© 2006 PTC
动态图元 关于重力
用来模拟重力对机构运动的影响.
重力加速度值
重力的方向
42
© 2006 PTC
连接类型
机构的连接: 在装配零件时,采用如图所 示的连接类型,使的零件的 之间具有一定的自由度,可 实现相对的运动.
2
© 2006 PTC
连接类型
销钉连接 mdo\connections\pin&cylinder 轴对齐/插入曲面 平面匹配/对齐或点对齐(径向)
注:即允许绕着指定的轴进行旋转的连接,共1个自由度. 圆柱连接
凸轮连接的范例
根据左侧图的运动要求,采用 连接装配机构
Cam.prt Follower.prt
19
© 2006 PTC
凸轮连接的范例
新建一组件文件cam 首先,设置工作目录到机构运动仿真 \connections\cam目录下.
新建一组件文件,输入名称为cam>确定 >选取模板mmns_asm_design>确定
6DOF连接
连接可绕3轴进行旋转和平移运动.它没有任何方向的约束,总自由度 为6个.若要定义6DOF连接,我们需要选取零件和组件上的坐标系.
7
© 2006 PTC
拖拽
点拖动
主体拖动
拖拽 当机构连接好以后,可以通过拖拽功能,使元件间产生 相对运动.
8
© 2006 PTC
拖拽
9
© 2006 PTC
拖拽
Slot.prt
机构仿真
Slot_folloer.prt
提示: 本机构需要一个沿轴线移动的自由度+绕轴线 旋转的自由度,故采用圆柱连接和槽连接可实现 本机构的运动,想想还有其他的连接可实现此机 构的运动吗?
33
操作演示
© 2006 PTC
齿轮连接
34
© 2006 PTC
齿轮连接
定义齿轮轴
工具 按扭
曲面/曲线选取
15
© 2006 PTC
凸轮连接
B.所选曲面或曲线中,可以有平面和直边,但应避免在两个主体上同时出 现。
C.系统不会自动处理曲面(曲线)中的尖角/拐点/不连续,如果存在这样的 问题,应在定义凸轮前适当处理。 凸轮可定义“升离”、“恢复系数”与“磨擦”。
16
© 2006 PTC
凸轮连接
49
© 2006 PTC
机构分析
50
© 2006 PTC
新建测量 编辑测量 复制测量 删除测量
51
© 2006 PTC
测量
分析
运动
动态 静态
52
测量
•位置、速度、加速度 •间隔(距离) •自由度 •冗余 •时间 •主体方向 •主体角速度 •主体角加速度 除测力计外所有力
•位置 (Position) •连接反作用 •净负荷 •所有系统测量 •所有主体测量
37
© 2006 PTC
动态图元
38
© 2006 PTC
动态图元
关于执行电动机
使用执行电机可向机构施加特定的负载。执行电动机引起在两个主体 之间、单个自由度内产生特定类型的负荷,执行电动机通过对平移或 旋转运动轴施加力而引起运动。
选取模的类型
39
模的大小
选取执行电机 的运动轴
模:指力或扭矩,具体 根据选择运动轴的类型 而定。
构模块
定义分析 回放分析结果 生成分析的测量结果
定义阻尼 定义力/扭矩
25
连接图标显示 定义凸轮连接 定义齿轮连接 定义伺服电机
定义重力 定义执行电机 定义弹簧
定义初始值 定义质量属性
© 2006 PTC
凸轮连接的范例 3选取凸轮面 4选取平面及定义深度
26
© 2006 PTC