三点平衡法采访录
三点式动平衡方法

三点式动平衡方法三点式动平衡方法又称为“三点法”或者“动平衡法”,是一种旨在达到动力学平衡的设计原则。
该方法通过合理设置和配重,以解决机械设备在运动过程中的不平衡问题,从而降低振动和噪音,提高机械设备的性能和使用寿命。
三点式动平衡方法包括静平衡和动平衡两个阶段。
静平衡是指在设备没有启动或特定转速范围内停留时,使设备保持静止的平衡状态。
动平衡则是指在设备正常运转时保持平衡状态。
这两个阶段旨在减少设备振动和噪音,并提高设备的稳定性和性能。
第一步,选择平衡坐标点:通过分析设备的结构和运行特点,选择合适的平衡坐标点。
一般来说,平衡坐标点应距离设备转轴足够远,以确保平衡措施的有效性。
第二步,设置轴承支撑点:在平衡坐标点周围选择一个平面与转轴垂直的支撑点。
这个支撑点是用来支撑设备并产生力矩,以实现动力学平衡的关键。
第三步,确定平衡块位置:通过计算和试验,确定平衡块的位置。
平衡块应在平衡坐标点和支撑点之间设置,以提供所需的力矩,达到动平衡的效果。
第四步,安装平衡块:将平衡块安装在设备上,通常使用螺栓、焊接或黏合等方式固定。
第五步,调整平衡块位置:根据设备运行时的振动情况,对平衡块的位置进行微调。
通过不断调整平衡块位置,直到达到设备的动力学平衡为止。
然而,三点式动平衡方法也存在一些限制。
首先,由于设备的结构和运行特点的差异,平衡坐标点的选择和平衡块的位置调整需要经验和专业知识。
其次,由于外部环境的变化和设备磨损等因素的影响,设备可能会失去平衡,需要定期检查和调整平衡块的位置。
综上所述,三点式动平衡方法是一种简单有效的动力学平衡设计原则。
通过合理设置和配重,可以降低设备的振动和噪音,提高设备的性能和使用寿命。
然而,需要根据设备的结构和运行特点选择合适的平衡坐标点,并进行平衡块的位置调整。
这需要经验和专业知识,并需要定期检查和调整平衡块的位置。
三点作图法在热电厂风机动平衡中的应用

三点作图法在热电厂风机动平衡中的应用【摘要】由于热电厂的排粉风机、引风机叶轮容易磨损,常导致风机轴承振动偏大,通过多次对排粉风机进行现场动平衡试验,提出了风机叶轮三点作图法现场动平衡的方法,有效地消除了风机振动偏大的设备故障。
【关键词】三点作图法;现场动平衡;风机叶轮;应用1.序言(1)在热电厂生产过程中,排粉风机、引风机等离心风机常发生由于转子侵蚀磨损、结垢、掉块等原因引起振动被迫停运,过去的习惯处理方法是拆卸转子做离机平衡,但处理过程需要很长时间,导致长时间的停机,不仅影响了与它相配工艺主体设备的生产,更重要的是由此影响企业整体工艺流程的生产量,造成巨大的经济损失。
因此,在热电企业生产中,现场动平衡技术就显得越来越重要,而做好风机的现场动平衡,缩短检修时间是关键。
而在热电厂,排粉风机是由于风机叶轮不平衡导致的振动故障频发设备,是典型振动故障设备。
在此以排粉风机为例介绍三点法在风机叶轮现场动平衡的应用。
(2)现场动平衡方法有三点作图法与动平衡仪法。
对于这两种方法,分别采取了三点作图法与动平衡仪法同时对两台排粉机做叶轮现场动平衡试验;用三点作图法做完现场动平衡只用了2个半小时,而用动平衡仪做了3个小时都无法完成,甚至到最后只能改为三点作图法做,只用了2个小时就完成了;由于动平衡仪器在做动平衡过程中过于敏感,受其它方面影响较大,难以准确地捕捉到设备振动的信号,从而难以准确地判断出不平衡点在哪,这样就不但费时,甚至无法完成动平衡工作;而三点作图法,方法非常简单实用,本人用此方法做风机的动平衡多次,每次都能成功地完成。
2.三点作图法现场做排粉风机叶轮动平衡(1)热电厂排粉风机多数是使用单悬臂式支承联轴器传动的离心式风机,由于其工作介质是细煤粉颗粒,且温度较高(80℃左右),在运行一段时间后,常会由于叶轮磨损不均匀而引起轴承座振动偏大,长期下去将会造成轴承的损坏,威胁制粉系统的安全经济运行。
(2)一般的处理方法需视叶轮磨损情况而定,如叶轮仅是局部磨损较大,可采取叶轮表面堆焊填补的方法,但往往由于所施焊接的焊条不均匀,焊接量不好控制,因此造成试运时仍会出现振动偏大;如果普遍磨损已超过叶片原来厚度的1/2,则须更好叶轮或叶片,但由于叶轮加工或喷漆的质量分布不均匀以及现场配合误差,也会造成轴承振动偏大。
【doc】动平衡配重的三点法公式推导

动平衡配重的三点法公式推导I—1)1996年第3期(息69期)二竺些一九九六年九月压氆碰动平衡配重的三点法公式推导.工艺处工程师捏沮明经营计划处工程师叶汝椿.r7l厂工艺处助理工程师.』.)l提要):三点动平衡配重计算法是同小松压力机图纸技术同时;I进的一种计算离夸嚣飞轮动平衡配重的方法.本文从力学角度就其会式和它ffl-~L间的联系进行1推导,以利于准确掌握这一方法.在小松式压力机离合器飞轮动平衡配重计算中引进采用的三点动平衡法,是一种通过做图来计算配重物的方向和大小而实现动f,,平衡的方法.它同现有的渚如自动激光动平衡机,带育真空筒的大型高速动平衡机,框架式共振式动平衡机及其它各种专用的动平衡方法相比具有方便,经济的特点.三点动平衡方法主要包括:①,测振,其主要设备为ZzF6Ⅱ型变涡流式位移振幅测振仪(下面简称zⅡ测振仪);②,绘图,绘制三点振动置的叠加还原图,并判断出所加配重的方向;@,计算,通过公式计算出配重置的大小具体步骤本文不予详述,本文将仅运用力学理论对三点动平衡方法的三个步骤及其内在联系进行合理的解释.1三点动平衡法的公式推导1.1振动产生的原因我们知道三点动平衡方法的第一步是三点测振,那么振动是怎样产生的呢?为了弄清这个同题.我们介绍两个概念.质?一质心是物体质置的集聚点,它是物体固有的性质,与物体所在的空间位置无关.中心惯量主轴一当剐体对某轴的离心转动惯置为0时,我们称该轴为物体的惯量主轴一般来说.垂壹于物体对称面的轴就是物体的惯量主轴.中心惯量主轴就是通过质心的惯置主轴.当轴,飞轮等转子通过中心惯置主轴运转时是没有振动产生的.我f『丁设计转子对总是选择转子的几何中心作为运转中心.理论上讲,转子的几何中心与转子本身的中ttL"惯置主轴是重合的但由于材质的均匀性及机械加工方面等原因,实际的转子其运转中心(几何中心)与中心惯量主轴是不重合的.这样,质心相对于转子在运转时的运转中心便产生了离心惯性力.由于转子是安装在机架上的.因而转子对机架产生周期变化的作用力使机架产生了振动.其力的大小可以表示为(见图1):一61一自1Flrsin(~垆o)式中.F一离心惯性力;一转子的质量;r一质心到逗转中心的距离;f一转子运转时间;~转子运转的角速度;P.一转子在运转时的初相.1.2转子振动量的辔5f量由于转子安装在相应的机架上,所以离心惯性力对机架产生作用并产生变形.根据材料力学有:=F/量=mrsin(埘£+0)/点式中,一变形量i一弹性常数.1.3飞轮变形量的测量通过上面的分析并结合小橙式压力机飞轮转子实际情况.我们知道通过飞轮转子的运转不能求出质心的离心惯性力大小,而只能获得该惯性力所引起的框架振动量.也就是说,我们只能从振动量逆推出引起振动的质量大小和方向.因而为了获得振动量.我们将FzF6Ⅱ测振仪放在机架上并运转飞轮(转数相同).对于每一个不同的离心惯性力在测振仪上都可得到相应的振动埴(如图2).IE轮;2一安装机泉;3一z三F6Ⅱ蛩变捉斑式位移擐帽测t慢圈21.4兰点动平衡法的作用为了获得配重量的大小和方向,我们假想飞轮运转是平稳的而没有振动量,且额外增加一个不平稳量.每运转一次换个方向.共运转三次,相同.为了方便.我们把童钧系在飞轮的螺钉把合孔上,距中心距离R/2.(1)振动量叠加还原图在坐标纸上以定点0为圆心做等距的同心圆,圆之间距离代表一定单位的振动量. 假想飞轮转子的运转中心与O点重合.过0点画出飞轮转子上12个螺钉孔的位置线.并注明数字l~12.确定l,5,9三个方向为ml的配重方向,并将飞轮三次运转中ZzF6Ⅱ振动仪测得的振动量【s,89还原到图上叠加起来.需要说明的是,我们测得的振动量为离心惯性力引起机架振动的最大埴,其获得位置应是惯性力方向与ZzF6lI测头方向平行至此得到I,Ⅱ,Ⅲ三点如图3.这样一叠加还原图就完成了.圈3一叠加还原圈(2)图解判断配重的方向我们知道,如果飞轮转子质心与飞轮转子运转中心重台,应有【~=5~=9.而当飞轮转子质心与飞轮转子运转中心不重合时,则lmⅡ≠占5附≠占9~.这时【m 5~,9应分别是£在三次运转时引起机架振动量与质心的离心惯性力引起机架振一62一,,,,动量在OI,OⅡ,OⅢ三个方向上叠加以后的振动量.那么引起机架的振动量是多大呢?我们知道引起机架的振动量在OI,OⅡ,OⅢ三个方向上应相同.为此我们以I,Ⅱ,Ⅲ三点为准做个外接四,所获圆心为G.通过G做OI,OⅡ,OⅢ的平行线与圆周相交于X,y,z三点.也就是说GX,Gy,Gz是.在三次运转中对机架产生的最大振动量,而飞轮转子质心所引起的最大振动量为OG.也正是由于OG才使O I,OⅡ,OⅢ偏离了它的理论振动量Gx, GY,GZ.连接OG并分别与圆周交于A,B两点.我们的配重方向应在质5-行走方向的反向,因而应在GO线段或其延长线上(见图4).囝4(3)求解配重量,厶,式的推导我们知道引起机架最大振动量的力F珊应为F=m叫rsln(£+9)的最大值,即:F一m∞而其【起的最大变形为:=F~/对于飞轮转子及其安装框架来说,^=一PL/487_J为了克服飞轮转子质心与飞轮转子运转中5-不重合而【起的振动量‰,我们假想在飞轮转子把合螺钉孔处有一重物2引起的机架振动量也为0G,2方向在GO上:8oa=F一/^=7tloJR/2k而我们已知引起机架的振动量为GA,也就是::1R/28c~前两式联立可得:∞=18oG/‰由图可知,∞=口一GA=口一(口+b)/2=(口一b)/2‰=(4+b)/2-'.∞2=埘l(4一b)/(4+b)这样.关于三点动平衡配重公式就推导完成了.(4)关于公式2=∞1(4+b)/(口一6)在三点法动平衡中有两个公式,第一个我们已经推导完了,下面对2=1(4+b)/ (4—6)进行说明.由于ZzF6Ⅱ测振仪无法反映振动量的正负,因而无法反映出现的另一种情况,即由于离心力引起机架振动量过大而出现的O点在G心圆周之外的现象.这时我们可以采用2=l(4+b)/(4—6)进行配重,方向不变.2结语三点动平衡方法方便.经济,不失为一种好的动平衡方法,但由于做图中各种因素的影响往往误差较大.这对精密的动平衡来说是不适合的,也是应注意的.现在该方法已完成了计算机的程序设计,我们希望通过计算机的精确绘图会使该方法越来越精确,从而使该方法在盘类转子中的应甩越来越广泛. ——63——。
三点式动平衡方法
利用普通振动仪对离心式风机做现场动平衡(三点式)
使用工具:
1.振动仪 1台
2.M13梅花板手1只
3.电焊机1台
4.瓦斯切割器 1组
5.配重铁块 1只
6.劈灰刀 1把
7.电子天平(量程1000克,精度0.1克) 1台
8.记号笔(黄色或红色) 1支
操作步骤:
1.将风机断电;
2.用M13梅花板手将人孔打开,工作人员进入风机内,用劈灰刀将风机叶轮上污垢去除,再用抹布搽干净;
3.盖上人孔,开启风机,将振动仪固定于最能够反应风机振动的位置(如:风机侧轴承振动水平向),测出该点振动值A0;
4.将风机断电,开启人孔.将叶轮后盘(或前盘)圆周三等分,并用记号笔表识:1点,2点,3点;
5.取配重块mp(一般200g左右),将其点焊于点1处,然后关闭人孔,开启电源,待风机运转平稳后,记录下振动值A1;
6.将风机断电,取下点1处的配重块, 将其点焊于点2处,重复步骤5,记录下振动值A2;同样方法,测得振动值A3;
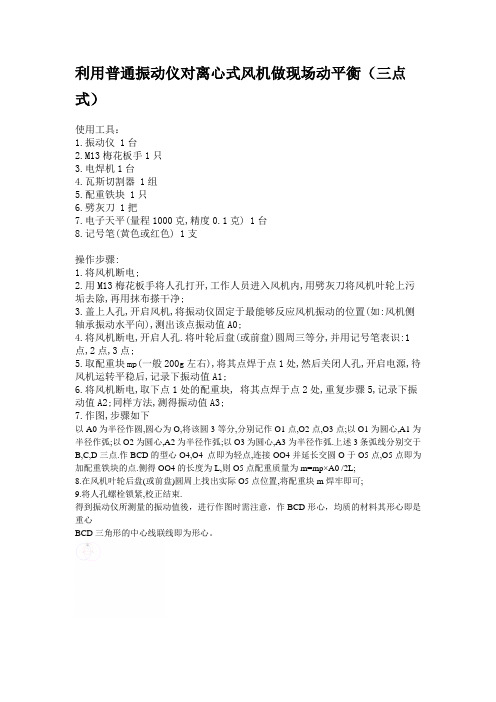
7.作图,步骤如下
以A0为半径作圆,圆心为O,将该圆3等分,分别记作O1点,O2点,O3点;以O1为圆心,A1为半径作弧;以O2为圆心,A2为半径作弧;以O3为圆心,A3为半径作弧.上述3条弧线分别交于B,C,D三点.作BCD的型心O4,O4 点即为轻点,连接OO4并延长交圆O于O5点,O5点即为加配重铁块的点.侧得OO4的长度为L,则O5点配重质量为m=mp×A0 /2L;
8.在风机叶轮后盘(或前盘)圆周上找出实际O5点位置,将配重块m焊牢即可;
9.将人孔螺栓锁紧,校正结束.
得到振动仪所测量的振动值後,进行作图时需注意,作BCD形心,均质的材料其形心即是重心
BCD三角形的中心线联线即为形心。
现场动平衡方法有三圆法

现场动平衡方法有三圆法、对称重量法、测相法等。
三圆法是在平衡测试中,把一定质量试重块,分别加在转子同一圆周平面三等分点上,测得转子不平衡量的大小,以此做三个圆,并汇交于一点,以确定不平衡量的轻点的位置和大小。
转子在某确定转速运行下,测得其原始振动量R0,之后将一定质量的试重块(M)分别贴在转子1、2、3点上试调,测得新的不平衡量分别为R1、R2、R3。
按一定绘图比例,将R0、R1、R2、R3画出三圆汇交图。
根据汇交图与转子的对应关系就可以找到转子轻点的方位。
三圆法现场平衡具体操作步骤(1)将待平衡的刚性转子选好修正平面, 并在此平面的同一圆周上取三等分点,等分点用A、B和C表示,圆心用O表示,夹角都为1200(图1),以A点作为基准方位。
假如转子原有不平衡量为G,也称为残余不平衡量,它的大小和方位都是不可知的。
(2)转子在某确定转速运行下,测得其原始振动量R0,单位为mm/s。
(3)加试重块,质量为Q,单位克(g)。
(4)将试重块M分别放在A、B、C三点上,三次在同一确定转速下,开机运转测得振动值分别为:A点振动值R1;B点振动值R2;C点振动值R3,单位为mm/s。
(5)用相同比例,作振动向量图! { e6 t( z% E: w6 M& C2 b- u1 M: P以初始机器运转时基圆R0为半径画圆,在R0圆上等分三点,编号用A、B、C表示,参见图1。
以A点为圆心,以为R1半径画圆;以B点为圆心,以为R2半径画圆;以C点为圆心,以为R3半径画圆;在图1中,圆R1和R2交于a点,圆R1和R3交于b点,圆R2和R3交于c 点,连接abc三点,并做△abc外接圆,圆心为M;连接圆心OM,测量长度和ےBOO1的夹角,用α表示。
(6)转子原有不平衡量的质量的计算和位置的确定。
不平衡质量由G=QR0/OM确定,单位为克。
平衡位置在转子上,从A点向B点移动的角度为α。
(7)从作图可知,M点的位置分三种情况:如果M点位于基圆R0外侧,即OM>R0,说明试重块Q大于平衡质量Q;如果M点位于基圆R0上,即OM=R0,说明试重块Q与平衡质量G相等;如果M点位于基圆R0内侧,即OM<R0,说明试重Q小于平衡质量G。
简单介绍了3ω法的测试原理

简单介绍了3ω法的测试原理1. 引言在当今高度竞争的市场环境中,企业或个人的成功与创新能力密切相关。
而在创新过程中,评估和测试是非常重要的环节。
本文将简单介绍一种被广泛使用的测试方法——3ω法(Three Omegas Method),并探讨其测试原理以及在创新领域的应用。
2. 3ω法的概述3ω法是一种全面而深入的测试方法,旨在评估创新概念、产品或服务的潜力和可行性。
它得名于三个“ω”:原则(Originality)、兴趣(Interest)和价值(Value)。
通过测试创新概念在这三个方面的表现,3ω法能够提供关键洞察,帮助决策者在更好的基础上做出决策。
3. 3ω法的测试原理3ω法的测试原理建立在以下几个关键要素上:3.1 原则(Originality)原则是指创新概念的独特性和与现有解决方案的差异化程度。
在评估创新概念时,考虑其在市场中的新颖度和独特性是至关重要的。
通过对比现有解决方案或竞争产品,3ω法能够帮助评估创新概念的原创性和独特性。
3.2 兴趣(Interest)兴趣是指受众对创新概念的吸引力和关注度。
在评估创新概念时,了解目标受众对该概念的兴趣程度是必要的。
通过调研和市场分析,3ω法能够量化创新概念在受众中激发兴趣的程度,从而帮助创新者更好地了解市场需求。
3.3 价值(Value)价值是指创新概念所提供的实际价值和对用户的影响程度。
在评估创新概念时,考虑其可行性和潜在效益是关键的。
通过定量和定性的评估方法,3ω法能够评估创新概念的市场潜力和对用户的实际价值,从而提供决策者需要的信息。
4. 3ω法在创新领域的应用3ω法作为一种全面的测试方法,在创新领域有着广泛的应用。
以下是几个常见的应用场景:4.1 产品创新在产品开发过程中,使用3ω法进行测试可以帮助确定产品原创性和市场可行性。
通过对比现有产品、分析用户需求和预测市场趋势,创新团队可以利用3ω法提供的评估结果,进一步改进和优化产品设计,以满足用户需求并获得市场竞争优势。
初一学生学习心得 七年级学习心得
初一学生学习心得七年级学习心得初一学生学习心得篇一:对于学习,我们应该去适应它,而不是让它来适应我们。
那我们应该怎样去适应学习呢?我觉得我们应该做到以下三点:一、学得平衡。
学习,首先要做到的就是平衡。
不能说你喜欢这一学科,就一味地学习这一学科,而放弃其它学科。
但也不能因为你这一学科较弱而总学习这一学科,自己较强的学科却不去学习。
这些都是不平衡的现象,到最后只会是两手空空。
我们应该做到科科必学,科科平衡。
当然,如果自己的弱势学科实在是补不上,我们可以采取“扬长避短”的学习方法,让自己的优势学科学得更好,以弥补自己的不足。
二、学得透彻。
学习,就是要有敢问敢钻研的精神。
我是一个提倡“不懂就问”的学习方法的人。
要想学得透彻,不光上课要认真听,课后还要找出不懂的地方问老师,与同学探讨,力求把每一个不懂的地方都弄懂,每一个知识点都学懂。
不能将不懂的知识都藏起来,要记住把不懂的知识变成为自己的知识,是一件有利于自己的事。
三、学得有趣。
当你把所有的知识都学懂之后,你会发现,原来那一道道如拦路虎般的练习题都变成了笑脸在向你招手。
学得有趣就是要在学得透彻的基础上更进一步。
把做练习题变得像做游戏一样有趣,那你的学习之旅就会变得既轻松又愉快了。
以上所说的是学习方法,接下来该说说学习态度了。
学习态度对于学习也是非常重要的。
我的学习态度就是:考得好,不能骄傲,心中要牢记“骄兵必败”这句话。
考得差,不要气馁,振作精神,鼓足力气努力冲刺。
学习是一件困难而又轻松的事,只要你掌握一定的学习方法与态度,就能化难为易,轻松学习。
学习,我曾经认为是一件很苦的事情。
但是,后来我找到了方法,兴趣,斗志,激情,我终于再不认为学习是一件枯燥的事情了。
英语比起其它语言来说,应该算是最容易的。
对于英语的口语学习我想说,单纯的背诵或者单纯的练习各种对话都是不够的,而要两者结合起来。
最后还是想说一句勤奋比任何技巧方法都重要,因为学英语贵在坚持。
语文呢?学语文要学会熟读课本的每一篇课文,我们只有把课文读透、读熟,课文中的知、情、意、景等,才自然会明白。
《常用康复治疗技术操作规范(2012年版)》
《常用康复治疗技术操作规范(2012年版)》1/262第一篇物理治疗 (8)第一章功能评定 (8)第一节身体形态评定 (8)一、姿势 (8)二、身高与体重 (9)三、肢体长度和围度 (9)第二节关节活动范围测量 (10)一、四肢关节 (10)二、脊柱关节 (11)第三节肌力评定 (12)一、徒手肌力评定 (12)二、等速肌力评定 (14)三、其他器械肌力评定 (15)四、肌肉耐力评定 (16)第四节肌张力评定 (16)一、手法评定 (16)二、仪器评定 (18)第五节感觉评定 (19)一、浅感觉 (19)二、深感觉 (20)三、复合感觉 (20)第六节平衡评定 (21)一、临床观察 (21)二、量表评定 (22)三、仪器评定 (24)第七节协调评定 (24)一、上肢 (24)二、下肢 (25)第八节步行评定 (26)一、步行能力 (26)二、步态分析 (26)第九节心血管评定 (28)一、心率 (28)二、血压 (29)三、心电分级运动试验 (30)四、简易运动试验技术 (31)第十节呼吸评定 (32)一、通气功能 (32)二、代谢当量 (34)三、心肺联合运动试验 (34)第十一节疼痛评定 (35)一、压力测痛法 (36)4/262第六节热疗法 (124)一、石蜡疗法 (124)二、湿热袋敷疗法 (125)三、泥疗法 (126)第七节压力疗法 (126)一、正负压疗法 (126)二、负压疗法 (127)三、正压顺序循环疗法 (128)第八节肌电生物反馈疗法 (129)第二篇作业治疗 (131)第一章作业评定 (131)第一节作业表现层次 (131)一、作业需求 (131)二、日常生活活动 (132)三、工作 (133)四、生存质量 (135)第二节作业构成层次 (136)一、手功能 (136)二、知觉功能 (138)三、认知功能 (146)第三节物理环境 (149)一、家居和社区环境 (149)二、工作环境 (150)第二章作业治疗 (152)第一节作业表现层次 (152)一、日常生活活动 (152)二、娱乐与休闲活动 (156)三、职业康复 (157)第二节作业构成层次 (162)一、功能性作业活动 (162)二、手功能 (167)三、知觉功能 (173)四、认知功能 (177)第三节环境改造与辅助 (178)一、自助具适配 (178)二、助行器使用 (179)三、轮椅选择与使用 (181)四、环境适应与改造 (184)第四节矫形器制作与使用 (185)一、矫形器制作 (185)二、矫形器使用 (186)三、压力衣制作与使用 (187)5/262第三篇言语治疗 (188)第一章听力障碍 (188)第一节评定技术 (189)一、主观测听 (189)二、客观测听 (190)第二节治疗技术 (190)一、声音察觉训练 (190)二、声音辨别训练 (191)三、声音识别训练 (191)四、声音理解训练 (192)五、助听器和电子耳蜗应用技术 (192)第二章失语症 (192)第一节评定技术 (192)一、失语症 (192)二、口面失用症 (196)三、言语失用症 (197)第二节治疗技术 (198)一、听理解治疗技术 (198)二、阅读理解治疗技术 (200)三、言语表达治疗技术 (201)四、书写表达治疗技术 (203)五、实用交流能力技术 (204)六、辅助交流技术 (204)第三章构音障碍 (207)第一节评定技术 (207)一、呼吸评定 (207)二、喉功能评定 (208)三、口唇评定 (209)四、下颌评定 (210)五、软腭评定 (211)六、舌评定 (212)七、反射评定 (214)八、言语评定 (215)第二节治疗技术 (216)一、舌感觉运动技术 (216)二、口唇感觉运动技术 (217)三、下颌运动技术 (218)四、软腭感觉运动技术 (219)五、声带运动技术 (220)六、呼吸训练技术 (220)七、发音训练技术 (221)八、语调音量训练技术 (222)6/262九、交流辅助系统应用技术 (222)第四章吞咽障碍 (223)第一节评定技术 (224)一、口面部评定 (224)二、吞咽功能评定 (225)三、摄食吞咽评定 (227)四、吞咽失用评定 (229)五、录像吞钡造影检查 (229)第二节治疗技术 (231)一、颈部放松及口周肌群训练 (231)二、咳嗽训练 (232)三、门德尔松手法 (233)四、屏气吞咽训练 (234)五、吞咽反射促通技术 (234)六、电疗 (235)七、球囊扩张技术 (235)八、进食训练 (236)第五章发声障碍 (238)第一节评定技术 (238)一、发声的客观评定 (238)二、声质的评定 (239)第二节发声训练治疗技术 (239)一、基础发声训练 (239)二、发声矫治训练 (240)第六章口吃 (242)第一节评定技术 (242)一、儿童口吃评定 (242)二、成人口吃评定 (243)第二节治疗技术 (244)一、儿童口吃治疗 (244)二、成人口吃治疗 (245)第七章唇腭裂 (247)第一节评定技术 (247)一、器官结构及功能评定 (247)二、语音评定 (248)第二节治疗技术 (249)一、发声异常训练 (249)二、腭咽闭合不全训练 (250)三、构音训练 (251)第八章儿童语言发育迟缓 (252)7/262第一节评定技术 (252)一、物体操作评定 (252)二、语言发育能力评定 (253)三、语言发育相关能力评定 (254)四、交流态度评定 (255)第二节治疗技术 (256)一、事物及事物状态理解训练 (256)二、事物基本概念的理解训练 (256)三、事物的符号理解训练 (257)四、词句及句子主要成分理解训练 (258)五、句子及语法规则的理解训练 (259)第九章孤独症语言障碍 (260)第一节评定技术 (260)第二节治疗技术 (260)一、孤独症语言交流训练 (260)二、孤独症治疗技术对语言的影响 (262)8/262第一篇第一章物理治疗功能评定第一节身体形态评定一、姿势1、定义观察或测量受检者在静止或运动中身体所处空间位置的过程。
焦点小组访谈法
本次介绍我将从三个方面来做详细说明,它们分别是发展过程、应用范围和应用步骤,在介绍过程中,我会例举一些学术界和实务界的研究实例,希望大家能在听完我的介绍之后,对焦点小组讨论法能有更多的了解与兴趣。
好,那下面我们正式进入今天的介绍,首先我想先从焦点小组访谈法的发展过程说起。
作为受众研究的一种分析方法,焦点小组访谈法获得了广泛的运用和认可。
随着二十世纪八十年代媒介研究中对接受方研究的兴起,这种小组访谈的方法成为了传播学和媒介研究者发展出来的研究方法库中的非常关键性的一种。
不过,这种方法的历史和起源在时间上却可以追溯到更久远以前,而且涉及到许多其他研究领域。
罗伯特?默顿在他有关小组访谈和焦点团体的文章中,对这种方法的形成和发展追溯到了二十世纪四十年代。
他提到了哥伦比亚大学的保罗?拉扎斯菲尔徳在哥伦比亚广播研究室所进行的广播受众以及电影观众的研究,其中,以默顿为美国国家军队信息和教育部研究机构所做的军队道徳培养和训练的电影最负盛名。
默顿和肯徳尔于1946年出版了一篇题为“聚焦采访”的文章,并在10年之后又据此分析出版了同样长的另一部作品,这个举措通常被认为是媒介受众和传播过程研究方法诞生的标志。
尽管焦点小组访谈法早期是源自社会科学,但是它在随后的几十年内,都主要是运用于商业市场调査,而不是社会学或者其他相关学科中,也是直到二十世纪七八十年代,这种方法才在社会学研究中复兴,并从方法论的优点和运用方面做了新的考证。
那它是怎么复兴的呢?这一切也都源于二十世纪八十和九十年代受众研究的转向,从研究媒介对受众行为和信仰产生的影响和效果转到了这样一些方面:受众是如何理解、认知、使用媒介、如何与媒介发生互动的,以及如何产生媒介内容和技术之外的意义。
因此,在过去的25到30年间,焦点小组访谈法作为一种媒介和传播学研究方法的复兴,与传统效果研究范式的转向以及其中的变化也就紧密联系在了一起,比如我们非常熟悉的建立于统计调査基础上的培养理论、议程设置理论以及使用与满足研究。
养生3法:推腹、跪膝、金鸡独立
养⽣3法:推腹、跪膝、⾦鸡独⽴推腹法: 顾名思义就是推肚⼦,⽤⼿指、⼿掌、拳头皆可,由⼼窝向下推到⼩腹。
简单吧,但是我还要对您苦⼝婆⼼,反复强调,这可是最好的健⾝法。
千万不要因其简单⽽忽略,那样您真是把天上掉下的馅饼当⽜粪了。
其实这个⽅法,也不是我的新发现,古来就有,但是我要告诉您⼀个书上没有的秘密,那就是⼀切慢性疾患,都可以在腹部找到相应的阻滞点。
也就是说,⼀切慢性病都可以在腹部找到其对应的蛛丝马迹。
由此,我们可以得到这样⼀个好处:当我们的慢性病牵延不愈,但⼜不知病因何在、如何治疗的时候,那时您就去寻找这个腹部的阻滞点(也许是⼀个硬块,也许是⼀个痛点,也许是⼀个“⽔槽”,也许是⼀个“⽓团”)只要把它推开揉散,您会发现您的慢性病也随之消失了,如果您没有发现⾃⼰有什么慢性病,但推腹时却在某个部位有阻滞点,那您⼀定要赶紧将它推散揉开,因为那必是个将来的隐患。
您每天早上要起床时推⼀次,晚上临睡推⼀次,平常⽆聊时也可推推,有⼈⼀推就会打嗝放屁,那是清⽓上升,浊⽓下降,效果最好。
有⼈则会腹中咕咕⽔声,这是在推动腹中沉积多⽇的浊⽔,这种湿浊如果不及早排出,循经上头则头痛眩晕,滞塞⽑孔则⽪炎湿疹,遇肝⽕则化痰,逢脾虚则腹泄,遗患⽆穷。
必须及早清除。
“胃不和则寝不安”,是说肚⼦不舒服,就别想睡踏实觉。
有⼈长期睡眠不好,或眠浅易醒,或辗转难眠,或噩梦不断。
只能靠安定来⿇醉神经,真是痛苦不堪。
那我建议您赶紧推推肚⼦,您会很容易找到阻滞点,然后细⼼将它推散揉开。
那么从此以后,您就可以告别漫漫长夜忧愁枕,⼀觉睡过⽇三竿了。
跪膝法:跪膝法: 有⼀个⽅法特别能减肥、美容,就是每天跪下来⾏⾛。
在地板垫个软垫⼦,每天花20分钟在上⾯跪着⾛,两周就有效果。
跪着⾛,⾸先是把⽓⾎引到腿上去,引到膝盖上去的。
⼈⽼先⽼脚,因为⽓⾎不⾜,很多⼥⼠⼀到冬天脚就冰凉。
膝盖就是⼀个轴,需要润滑油。
什么是膝盖的润滑油?就是新鲜的⾎液,把⾎液引过去了,膝盖就不会磨损了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“三点平衡法”采访录时间:2012年4月12日地点:烧结厂电仪作业区学习室被采访人:电仪作业区副主任——赵忠峰引言生产是企业一切工作的重心,任何工作都是围绕生产来展开,一切的活动都是为生产服务。
设备作为硬件,是企业的重要资产,也是企业的核心。
技术作为软件,是企业发展的软实力。
生产效率的高低,与设备和科学技术的好坏密切相关。
为了提高生产效率我们不断的进行着设备的升级技术改造,不断的引进先进的科学技术,为生产服务。
然而在设备和技术不断升级的过程中,我们将会遇到很多很多的问题和困难,这就需要我们掌握相应的技术知识来驾驭这些先进的设备,需要我们不断的学习,不断的进步,与时俱进,发散思维,适应时代的发展,面对困难只要我们有一颗肯干肯专研肯学习的精神,任何问题都会迎刃而解。
赵忠峰是我厂电仪作业区副主任,他是一位勤学能干的人,对待工作认真细致、面对问题刻苦专研的,在他的工作笔记中页页都是密密麻麻的数据记录和计算公式。
为了解决风机转子振动难题,也是生产设备管理的瓶颈,赵忠峰主任带领他的团队,充分利用每次检修时间,经过数百次的试验研究,终于攻克了风机转子振动故障自身无法维修难题,并且掌握了“三点平衡法”维修技术。
“三点平衡法”虽然已是一种成熟的技术,但是知晓的人和懂技术的人并不多,赵忠峰主任就是凭着他的这股劲,经过刻苦努力专研终于掌握了全套技术,给每个领导和广大员工吃了颗定心丸。
从此,我们不再为风机转子故障发愁,不再为维修质量揪心。
采访过程采访者:赵主任你好!赵忠峰:你好!采访者:听说您攻克和掌握的风机转子振动故障维修技术,在实际生产中取得了非常好的效果,是这样吗?赵忠峰:是的,可以说立竿见影,概括为六个字就是“简单、实用、有效”。
采访者:那您是用什么方法解决风机转子振动问题的呢?赵忠峰:简单说就是用“三点平衡法”,这种方法很早就有人提出,是在现场工况条件下在转子上做动平衡试验,寻找失重点,增加配重,达到稳定转子减少振动的目的。
采访者:请您给大家简单介绍一下什么是“三点平衡法”。
赵忠峰:三点平衡法就是在排除转子支撑瓦、推力瓦、刮泥和积料等外界条件的影响下,在受损的转子圆周上三等分,将试验配重块加在每个等分点上做振动试验,然后测量基座振动位移、振动速度或加速度,利用作图法寻找出失重点基源和计算出配重块重量。
振动有三要素:频率、幅值、相位。
“三点平衡法”是一种简单实用的操作方法,对于因转子偏重造成设备振动超标可较容易的解决。
设备不需要拆卸运回厂家进行检测维修,只需要在现场条件下作动平衡和禁平衡试验就可以完成失重点的检测计算,维修后可大大延长转子的使用寿命。
采访者:在“三点平衡法”未掌握之前我们的主要困难是什么?赵忠峰:我厂所用的风机大体分为离心风机和轴流风机两类。
之前我们的设备完全依靠外购,技术力量和检测维修保养手段不足,而且完全依靠外协上的技术支持,这两个条件限制了我们的生产过程控制和计划安排。
我们的许多生产活动不能自行的组织实施,还得全面考虑外协的因素,这种让人牵着鼻子走的感觉很不好受。
为了让我们不再被动,不再依赖别人,不再受制与人,所以才让我下了解决转子问题的决心。
采访者:当时你是什么样的感受?又是怎样做的呢?赵忠峰:自己没有技术,厂家又只字不提,你也问不来,人家更不愿意说,在做实验的时候心里确实没底,也非常恐慌。
每次厂家来人检查维修的时候,我就仔细观察他们的操作细节,然后上网查资料,总结方法,第一次就是用“三点平衡法”在265㎡环冷5号风机上做实验,风机连续启动四次,每次运行两分钟,整个过程共计2-3个小时就可以完成测试,然后就是作图计算增加配重块,通过这次试验振动值由原来的880um直接降到280um。
第二次是265㎡检修时,还是利用这种方法在环冷5号风机上做实验,振动值由原来的280um直接降到72um,效果非常理想,立竿见影。
采访者:造成风机转子故障频出的原因是什么?赵忠峰:振动不平衡是造成故障的主要原因,风机振动故障容易造成基座损坏,电流超标跳闸,引起非计划性停机,对生产的稳定性和连续性影响很大。
造成风机转子振动不平衡的原因是转子磨损、挂泥、积料、热变形等导致转子重心失衡引起振动,其中转子磨损是引起振动的主要因素。
目前我们的除尘设备主要是重力除尘和悬风除尘。
由于除尘效果差,气流中的粉尘颗粒较多,对风机转子的磨损较为严重,时间一长磨损会加剧,最终风叶变薄穿孔,导致风机转子重心失衡引起振动,时间越长对设备损伤越大。
振动会引起基座移位、零部件损坏、电流升高跳闸停机,给生产过程控制带来很大的影响。
采访者:针对风机转子故障以前我们是如何进行处理和解决的?赵忠峰:当风机转子出现振动故障问题时,我们根本无计可施,不能在转子上增加配重也不能减少配重,通俗的说就是不能动。
起初主要是更换转子,把损坏的转子运回厂家维修,这就需要我们提前准备好备件,才能保证生产的连续性。
由于我们的设备全部是外购来的,我们没有技术经验,厂家对技术又非常保守,设备的安装、检查和维修完全依赖外协,一切厂家说了算,厂家说换就得换,说修就得修,主动权在厂家手里,我们只能被动吃亏。
采访者:那么厂家维修对生产有什么样的影响呢?赵忠峰:我们的风机转子体积庞大,自重达17吨,直径达3米,以前的处理方法存在很多的弊端:1、拆装麻烦。
转子损坏之后,需要进行更换新转子,拆装过程需要很多的人力和物力,比较费事。
2、运输麻烦。
损坏的转子拆卸下来之后,需要运回厂家,上动平衡机进行检测之后,才能进行维修。
3、周期较长。
转子维修好之后再运回厂里作为备件使用,这是一个相当漫长的过程,对我们的生产组织影响较大。
4、维修费用大。
一开始我们需要购买两套设备,一个当做备件,一个安装运行,这无形中增加了投资成本。
备件损坏之后,拆装运输检查维修需要大量的人力物力,投资费用较高。
5、维修效果不太理想。
设备运回厂家维修好之后,再运回使用周期太短。
比如265㎡烧结环冷5号风机维修好之后的振动值一周之内就由3.10mm/s(280um)上升至45mm/s(880um)。
主要原因是拆卸之后改变了转子的原有工况条件,导致检测不准确,维修后使用效果不太理想。
总之,这种费钱、费时、费力的做法让我们吃了不少亏。
采访者:那现在我们又是怎么做的呢?赵忠峰:“三点平衡法”掌握之后,我们完全可以摆脱厂家的限制进行自修,做到免购买备件,免拆卸运输,免检测费用,达到“省钱、省工、省时、省力”的目的。
我们的可以在无备件的情况下,不对设备进行拆卸安装更换,只需要的在现场的基础条件下,在不改变设备的原有工况条件,在计划性停机时间内,用三点平衡法对转子进行检测确认,给失重点增加配重维修加固,达到延长风机转子使用寿命周期的目的,这种做法可以完全满足生产的需要,而且效果非常理想。
采访者:那么对磨损的转子我们是怎样处理的呢?赵忠峰:在维修过程中,我们主要是在磨损部位堆焊耐磨焊条,达到补重,延长使用周期的目的。
采访者:您能给我们说一下三点平衡法与动平衡仪检测有什么优缺点?赵忠峰:任何一项发明创造都有其优缺点,只要利的一方面远大于弊,就可以被我们利用,为生产服务。
三点平衡法与动平衡仪其检测原理是相通的,但是二者在检测手段上和实际效果上却是有很大的差异。
1、厂家的做法需要拆装运输,上动平衡仪进行检测寻找到失重点,在这一过程中任何一项工作都有可能改变转子的原有工况条件,最终影响检测的准确性,缩短转子的使用寿命周期。
而三点平衡法则不需要拆装运输,只是在原有的环境条件下,利用现有的工况条件进行检测维修,寻找失重点速度更快更直观。
2、厂家的做法需要依赖动平衡仪对转子失重点进行检测确定,而三点平衡法只需要一种便携式测振仪或平谱仪获取检测数据,然后通过作图法计算出重心位置和配重质量即可,检测确认方面快捷。
3、厂家的做法维修周期较长,而且我们还需要备件,对我们的生产影响大,而三点平衡法只需要利用检修时间,做好失重点的维修补焊即可。
以后即使是转子磨损再快,我们完全可以利用停机检修时间做到短时间抢修,从而保证设备生产的正常运行,达到省时、省钱、效率高、降本增效的目的。
4、厂家的做法在动平衡仪上做高速振动检测才能确定失重点,而三点平衡法只需要做四次实验每次连续开机两分钟即可完成测试工作。
但其弊端是如果测重块加在失重点上,会加剧振动,对设备的损伤较大,而且速度越快危险性越大。
但目前三点平衡法是低速检测,完全可以规避危险的发生。
简单的概括就是:三点平衡法:简单、快速、实用、有效、运行条件低(低速检测),但检测的准确性还有待提高;动平衡仪:运输麻烦、费用高、周期长、运行条件高(高速检测)、不一定有效(工况条件发生了改变),但检测的准确性较高。
采访者:三点平衡法在解决转子故障方面的效果又如何呢?赵忠峰:通过大量的试验数据可以证明,三点平衡法在解决转子振动方面具有很好的效果,立竿见影,而且简单、实用、有效。
试验数据如下:试验设备试验次数振动幅值或位移维修后幅值或位移265㎡环冷5号风机 3 880um 280um 880um 50um265㎡主抽风机 2 6.5mm/s 1.0mm/s 10.0mm/s 2.0mm/s265㎡配料除尘风机 1 196um 60um 400㎡整粒风机 1 4.1mm/s 1.0mm/s54㎡主抽风机 3 45mm/s 1.8mm/s 96um 56um采访者:现在我们使用的是“三点平衡法”对圆周进行三等分,准确性不高。
那么我们是否可以再圆周上进行N等分呢?那样准确率是否可以提高?赵忠峰:这个问题提的很好,理论上我们可以在圆周上进行N等分,这样寻找失重点的准确率就更高。
但是为获取参数寻找失重点,我们有意的破坏原有平衡加一个不平衡上去,我们启动风机的次数越多,对转子损伤更大,增加了危险运行次数,这个是我们不希望的,所以我们只能适可而止,只要检测接近失重点能满足要求就可以。
小结通过这次采访让我深深感慨,在我们的身边有许许多多优秀的员工,他们的能力和智慧让我们称赞,他们的精神和境界是我们学习的榜样。
同时也印证了这样一句话“没有做不到的,只有想不到的”,只要我们有一颗认真仔细努力上进的心,只要我们有一种善于发现问题解决问题的意识,只要我们有一种不断进取的精神,只要我们有一股永不退缩的劲,任何事情都是可以做成的。
只要我们将大家团结起来,充分发挥大家的聪明才智,才能在前进路上走的更远,才能让我们的生活过的更充实美好,才能真正实现我们的人生价值,才能让龙钢得到飞速的发展,取得更大的辉煌。
(作废)引言:目前在生产中和设备上存在的很多问题、难点和弊端,给我们的生产工作开展和过程控制带来了诸多不便和影响。
为了改变这种被动局面,我们广大员工做了很多努力,加强生产操作和过程控制,进行设备的升级技术改造,通过征集广大员工的合理化建议和意见,经专业人士和主管领导的审核,许多技术难题被攻破掌握,许多的创新项目被采纳,许多的发明创造为生产建设服务创利,这些成果的取得都是我们广大员工辛勤的汗水和智慧的结晶,诸如此类不胜枚举。