用有限体积方法求解欧拉方程
有限体积法介绍
有限体积法介绍有限体积法1 有限体积法基本原理上⼀章讲到的有限差分法将数值⽹格的节点上定义为计算节点,并在⽹格节点上对微分形式的流体基本⽅程进⾏离散,⽤⽹格节点上的物理量的代数⽅程作为原PDE 的近似。
在本章所要学习的有限体积法则采⽤了不同的离散形式。
⾸先,有限体积法离散的是积分形式的流体⼒学基本⽅程:d q ds ds SSΩΩ+??Γ=?φφρφn n v(1)计算域⽤数值⽹格划分成若⼲⼩控制体。
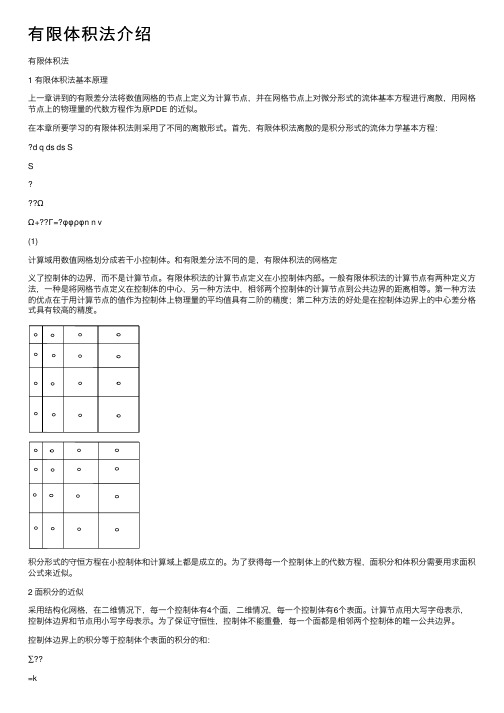
和有限差分法不同的是,有限体积法的⽹格定义了控制体的边界,⽽不是计算节点。
有限体积法的计算节点定义在⼩控制体内部。
⼀般有限体积法的计算节点有两种定义⽅法,⼀种是将⽹格节点定义在控制体的中⼼,另⼀种⽅法中,相邻两个控制体的计算节点到公共边界的距离相等。
第⼀种⽅法的优点在于⽤计算节点的值作为控制体上物理量的平均值具有⼆阶的精度;第⼆种⽅法的好处是在控制体边界上的中⼼差分格式具有较⾼的精度。
积分形式的守恒⽅程在⼩控制体和计算域上都是成⽴的。
为了获得每⼀个控制体上的代数⽅程,⾯积分和体积分需要⽤求⾯积公式来近似。
2 ⾯积分的近似采⽤结构化⽹格,在⼆维情况下,每⼀个控制体有4个⾯,⼆维情况,每⼀个控制体有6个表⾯。
计算节点⽤⼤写字母表⽰,控制体边界和节点⽤⼩写字母表⽰。
为了保证守恒性,控制体不能重叠,每⼀个⾯都是相邻两个控制体的唯⼀公共边界。
控制体边界上的积分等于控制体个表⾯的积分的和:∑??=kkfds fdS(2)上式中,f 可以表⽰n u ρφ或nΓφ。
显然,为了获得边界上的积分,必须知道f 在边界上的详细分布情况,这是不可能实现的,由于只是计算节点上的函数值,因此必须采⽤近似的⽅法来计算积分。
整个近似过程分成两步第⼀步:⽤边界上⼏个点的近似积分公式第⼆步:边界点上的函数值⽤计算节点函数值的插值函数近似⾯积分可采⽤以下不同精度的积分公式:⼆阶精度积分:e e e e S e Sf S f fds F e≈==?(3)上式中e f 为边界中点出的函数值。
欧拉公式的证明和应用

数学文化课程报告欧拉公式的证明与应用一.序言------------------------------------------------------------------------2二.欧拉公式的证明--------------------------------------3极限法 --------------------------------------3指数函数定义法-------------------------------4分离变量积分法-------------------------------4复数幂级数展开法-----------------------------4变上限积分法---------------------------------5类比求导法-----------------------------------7三.欧拉公式的应用求高阶导数-----------------------------------7积分计算------------------------------------8高阶线性齐次微分方程的通解------------------9求函数级数展开式----------------------------9三角级数求和函数----------------------------10傅里叶级数的复数形式-------------------------10四.结语------------------------------------------------11参考文献-----------------------------------------------11一.序言欧拉是十八世纪最杰出的最多产的数学家之一[1],留下了数不胜数的以其名字命名的公式。
本文关注的欧拉公式x i x e ixsin cos +=,在复数域中它把指数函数联系在一起。
应用有限差分法计算二维欧拉方程
应用有限差分法计算二维欧拉方程有限差分法是一种常用的数值计算方法,用于求解偏微分方程。
二维欧拉方程是一类常见的二阶偏微分方程,表示为:∂u/∂t=a(∂²u/∂x²+∂²u/∂y²)其中,u(x,y,t)是待求解的函数,a是常数。
为了使用有限差分法计算二维欧拉方程,我们需要离散化方程中的时间和空间变量。
我们可以将定义域分成n个小区间,将时间区间分成m个小区间,其中n和m可以任意选择,但需要满足数值稳定性要求。
在空间方向上,我们可以将二维区域分成nx × ny个小网格,每个小网格的尺寸为Δx × Δy,其中Δx和Δy是步长。
在时间方向上,我们将整个时间域分成m个时间步长,每个时间步长的尺寸为Δt。
我们可以用u(i,j,k)表示空间坐标(x,y)为(iΔx,jΔy)、时间坐标t 为kΔt的节点处的值。
根据欧拉法的思想,我们可以使用以下差分格式来近似二维欧拉方程:(u(i,j,k+1)-u(i,j,k))/Δt=a((u(i+1,j,k)-2u(i,j,k)+u(i-1,j,k))/Δx²+(u(i,j+1,k)-2u(i,j,k)+u(i,j-1,k))/Δy²)注意到,上式使用中心差分来近似二阶偏导数项。
通过对上述方程进行适当的变换和代数运算,我们可以得到u(i,j,k+1)的计算公式:u(i,j,k+1)=u(i,j,k)+aΔt((u(i+1,j,k)-2u(i,j,k)+u(i-1,j,k))/Δx²+(u(i,j+1,k)-2u(i,j,k)+u(i,j-1,k))/Δy²)通过以上公式,我们可以在每个时间步长上,从已知时刻的u值,计算下一个时刻的u值。
在进行计算前,我们还需要确定边界条件。
边界条件是在方程定义域的边界上给出的额外条件,用于限定问题的解。
常见的边界条件有固定值边界条件、导数值边界条件和周期性边界条件等。
欧拉公式19种证明
欧拉公式19种证明欧拉公式是数学中的一个重要公式,它的表达式为e^(ix)=cos(x)+i*sin(x),其中e表示自然对数的底数2.71828…,i表示虚数单位。
欧拉公式有多种证明方法,下面我们将介绍其中19种常见的证明方法。
1. 泰勒级数证明法:利用泰勒级数展开式展开e^(ix)和cos(x)+i*sin(x),然后将它们相等的系数进行比较,即可得出欧拉公式。
2. 复合函数证明法:将e^(ix)看作复数函数f(x)=e^x,将cos(x)和sin(x)看作f(x)的实部和虚部,则有f(ix)=cos(x)+i*sin(x),即e^(ix)=cos(x)+i*sin(x)。
3. 微积分证明法:将欧拉公式两边分别对x求导,得到ie^(ix)=-sin(x)+i*cos(x),再将其两边同时乘以i,即可得到欧拉公式。
4. 积分证明法:将欧拉公式两边同时积分,得到e^(ix)/i=-sin(x)/i+cos(x),再将其两边同时乘以i,即可得到欧拉公式。
5. 欧拉级数证明法:将e^(ix)和cos(x)+i*sin(x)的泰勒级数展开式进行对比,即可得到欧拉公式。
6. 幂级数证明法:将e^(ix)和cos(x)+i*sin(x)的幂级数展开式进行对比,即可得到欧拉公式。
7. 矩阵证明法:构造一个2x2矩阵,使其特征值为e^(ix)和e^(-ix),然后求解该矩阵的本征向量,即可得到欧拉公式。
8. 矩阵幂证明法:将e^(ix)表示为矩阵的形式,然后对该矩阵进行幂运算,即可得到欧拉公式。
9. 极限证明法:将e^(ix)表示为极限的形式,然后通过极限的性质推导出欧拉公式。
10. 解微分方程证明法:将e^(ix)看作微分方程y'=iy的解,并利用欧拉公式将其转化为y=cos(x)+i*sin(x),即可得到欧拉公式。
11. 解偏微分方程证明法:将e^(ix)看作偏微分方程u_t+iu_x=0的解,并利用欧拉公式将其转化为u=cos(x-t)+i*sin(x-t),即可得到欧拉公式。
应用有限差分法计算二维欧拉方程

基于非结构网格二维Euler方程的Jameson求解方法姓名:王司文学号:sx摘要本文介绍了基于CFD理论的求解二维可压缩流Euler方程的Jameson中心格式方法。
在空间离散上采用的是有限体积法,时间上采用的是四步显式Runge -Kutta迭代求解。
人工耗散项为守恒变量的二阶和四阶差分项。
边界条件采用的是无反射边界条件,并采用当地时间步长进行加速收敛。
最后对NACA0012翼型划分了三角形,并应用本文程序进行数值模拟,结果较为理想。
关键字:CFD,Jameson中心格式,Euler方程,有限体积法AbstractA method for the numerical solution of the two-dimensional Euler equations has been developed. The cell-centred symmetric finite-volume spatial discretisation is applied in a general formulation. The integration in time, to a steady-state solution, is performed using an explicit, four-stage Runge-Kutta procedure. The artificial dissipation is constructed as a blending of second and fourth differences of the conserved variables. And in the boundary, there is none of the outgoing waves are reflected back into the computational domain. An acceleration technique called local time stepping is used. At last, standard test cases for both subsonic and supersonic flows have been used to validate the method.Key words:CFD, Jameson method,Euler equations, finite-volume第一章引言在工程应用的推动下,计算流体力学随着计算机技术的发展和计算格式的不断更新而迅猛发展。
计算流体力学中的有限体积法 pdf

计算流体力学中的有限体积法 pdf 有限体积法(Finite Volume Method)是计算流体力学中一种常用的数值求解方法,它通过将流域划分为离散的有限体积单元来近似描述流体的宏观守恒方程。
这一方法在许多领域中得到广泛应用,如流体动力学、热传导、质量传递等。
有限体积法通过将流域划分为有限体积单元,将守恒方程应用于每个单元,并通过积分得到方程在单元内的平均值。
在有限体积单元内,流体的宏观守恒方程可以表示为一个线性代数方程组。
通过对方程组进行离散化,可以得到数值解,进一步用于模拟和预测流体力学现象的特性。
在有限体积法中,流域被划分为网格,通常是结构化或非结构化网格。
结构化网格以规则的矩形或立方体单元组织,而非结构化网格则根据流体流动的特性灵活调整单元的形状和大小。
无论是结构化还是非结构化网格,有限体积法都能够准确地处理流体流动的各种边界条件。
有限体积法的优势之一是它保持了宏观物理量的守恒性质。
例如,在处理流体流动时,有限体积法能够准确地保持质量、能量和动量的守恒。
这使得有限体积法在工程领域的应用十分重要。
例如,在空气动力学中,有限体积法可以精确地模拟飞机周围的空气流动,从而帮助设计师优化飞行器的性能。
为了得到准确的数值解,有限体积法需要进行离散化和数值逼近。
通常使用线性或高阶的插值方法对守恒方程进行离散化。
此外,为了解决方程组中的非线性项,可以采用迭代方法,如简单迭代或牛顿迭代。
有限体积法在多相流、湍流流动和传热等领域有着广泛的应用。
例如,在化工工艺中,有限体积法可以模拟复杂的多相流动,从而帮助工程师优化生产过程。
同时,有限体积法还可以用于研究液体和气体的传热特性,如对流、传导和辐射的影响。
总之,有限体积法是计算流体力学中一种重要的数值求解方法,通过将流域划分为离散的有限体积单元,通过离散化和数值逼近得到数值解,以模拟和预测流体力学现象的特性。
它具有保持宏观守恒性质的优势,适用于各个领域的流体流动问题。
欧拉方程推导过程

欧拉方程推导过程概述欧拉方程(Euler’s equation)是描述流体运动的基本方程之一,它是由瑞士数学家欧拉(Leonhard Euler)在18世纪提出的。
欧拉方程在流体力学、空气动力学等领域具有广泛的应用。
本文将介绍欧拉方程的推导过程,以及一些相关的概念。
基本假设在推导欧拉方程之前,我们需要先明确一些基本假设和定义: 1. 流体是连续的:假设流体是连续、无限可分的。
这意味着我们可以对流体的性质进行连续的观察和分析。
2. 流体是可压缩的:假设流体在运动过程中可以发生密度的变化。
3. 流体满足牛顿力学:假设流体的运动可以用牛顿力学描述,即满足牛顿第二定律。
推导过程为了推导欧拉方程,我们首先需要从基本假设出发,利用牛顿第二定律来描述流体运动。
1. 守恒方程守恒方程是流体力学中的基本方程,描述了质量、动量和能量的守恒。
在欧拉方程的推导中,我们主要关注质量守恒和动量守恒。
1.1 质量守恒质量守恒可以表达为以下形式:∂ρ+∇⋅(ρv)=0∂t其中,ρ表示流体的密度,v表示流体的速度。
该方程描述了密度在空间和时间上的变化。
1.2 动量守恒动量守恒可以表达为以下形式:ρ(∂v ∂t+v ⋅∇v)=−∇p +∇⋅T +ρg 其中,p 表示流体的压强,T 表示应力张量,g 表示重力加速度。
该方程描述了流体的动量在空间和时间上的变化。
2. 应力张量欧拉方程中的应力张量T 描述了流体内部的相互作用力。
它可以通过牛顿第二定律和基本假设推导得到。
2.1 应力张量的定义应力张量是一个二阶张量,它描述了流体内部各点沿不同方向的力和应变之间的关系。
在流体力学中,应力张量可以表示为:T ij =−pδij +σij其中,p 是流体的压强,δij 是克罗内克(Kronecker )δ符号,σij 是剪切应力张量。
2.2 应力张量的推导为了推导应力张量,我们考虑流体中某一点的受力情况。
由牛顿第二定律可知,该点受到的合力等于质量乘以加速度:F =ma将质量表示为体积乘以密度m =ρV ,并将加速度表示为速度的时间导数a =dv dt ,可以得到:F =ρV dv dt将体积表示为面积乘以厚度V =SΔz ,并将速度的导数表示为时间的偏导数dv dt =∂v ∂t ,可以得到:F =ρSΔz ∂v ∂t当体积趋近于0时,左侧的合力可以表达为面积上的应力乘以面积元dS,即F= TdS。
限体积法中面积分离散格式的精度分析
北京航空航天大学学报 Journal of Beijing University of Aeronautics and Astronautics
October 2000 Vol. 26 No15
有限体积法中面积分离散格式的精度分析
马 亮 李亭鹤
( 北京航空航天大学 飞行器设计与应用力学系)
近年来 ,在复杂流场的数值计算中出现了另 一种有限体积格式 — — — 顶点中心格式 , 它让物理 变量处于网格的节点上 , 而控制体为围绕该点的 虚拟网格 . 这种格式吸取了中心格式结构简单的 长处 ,又保留了顶点格式中物理量位于网格节点 的特点 , 已有人将此格式应用于复杂流场的计 算 [2 ] ,但还没有对此格式的详细精度分析 . 本文以 文献 [ 1 ] 的分析方法为基础 ,采用 Taylor 级数展开 的方法 ,给出了顶点中心格式在不同网格上的精
由此可以看到有限体积法的中心格式由于其本身固有的零阶误差不能通过加密网格来提高精度要保持较好的计算精度网格必须充分光滑正交顶点格式和顶点中心格式精度高于中心格式对于光滑性较差的网格也能保持一阶精度可以通过加密网格来减小误差因而更适合于绕复杂外形流场的计算
2000 年 10 月 第 26 卷 第 5 期
图6 粗网格上计算的等压图
图 7 是粗网格上计算的局部等压线 . 可以看 到 ,对于中心格式 ,等压线在网格扭曲较大的前后 缘处有明显的抖动 , 而顶点格式和顶点中心格式 则较光滑 . 图 8 和图 9 是在细网格上计算的等压 线 . 与粗网格相比 ,中心格式的等压线在前后缘处 的抖动依然存在 , 而顶点格式和顶点中心格式在 相应区域的等压线则变得更光滑了 .
x
5V
V→ 0 V
采用中心格式在网格单元 V i , j 的中心点上对 一阶导数进行数值近似 ( 图 3) , 有
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限体积法求解二维可压缩Euler方程——计算流体力学课程大作业老师:夏健、学强学生:徐锡虎学号:SQ日期:2010年2月5日目录一、容摘要 (2)二、流动控制方程 (2)三、有限体积法的空间离散 (2)四、人工耗散 (3)五、时间离散 (4)六、边界条件 (5)七、计算结果 (8)八、结论与展望 (11)参考文献 (11)一、容摘要本文通过运用JAMESON 有限体积法求解了二维定常和非定常可压缩Euler 方程。
程序实现语言为C++。
其中,使用的网格是三角形非结构网格。
在时间推进上使用的是四步龙—库塔推进格式。
推进的时间步长取的是当地的时间步长。
为了消除迭代误差、round-off 等误差,本文采用了添加人工耗散项的办法。
另外,本文计算了NACA0012翼型在跨音速下不同迎角的情况,并与fluent 软件的计算结果进行了比较,来验证程序的准确性。
二、流动控制方程守恒形式的Euler 方程:0=-+Ω∂∂⎰⎰ΩGdx Fdy wd t S(1) 其中x 和y 代表笛卡儿坐标系。
W 是守恒变量。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=E V U W ρρρρ (2)F,G 表示通量⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+=UH UV P U U F ρρρρ2, ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+=VH P V UV V G ρρρρ2(3) ρ,P , H 和E 表示密度,压强,单元总焓和单元总能量。
U,V 表示笛卡儿坐标系下的速度矢量。
这些量由理想气体的单位体积的总能量和总焓相互联系。
2/122)()(V U P E ++-=ργρ (4)P E H +=ρρ (5)三、有限体积法的空间离散计算域被划分为互不重叠的单元。
在每个单元运用守恒形式的Euler 方程。
由于每个单元相对于时间都是不变的,所以等式(1)可以写成:⎰⎰ΩΩ--=∂∂d Gdx Fdy tWS )( (8)其中Ω和S 是单元的体积和边界。
W 是单元的平均值。
在对上述方程进行时间离散前,先对空间进行离散,则方程(6)可以写为:k k k QdtdW Ω-= (9)其中k Ω表示第k 个单元的体积,k W 是第k 个单元的守恒变量。
k Q 表示第k 个单元的通量。
方程(7)的右边项可以写成:∑=∆-∆=kedgesi ik x G y F Q 1)( (10)其中 a b i a b i y y y x x x -=∆-=∆, (11) (8)式中的求和是对第k 个单元的所有边进行的。
守恒参数的量是单元中心值,在求通量时,第I 条边的守恒参数值是用左右单元的平均来表示的:2/)(W p k i W W += (12)引入变量:i i i i i x V y U Z ∆-∆= (13)则第k 单元的Euler 方程可以写为:∑=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆-∆+Ω-=kedges i ik k H Z x P V Z y P U Z Z dt dW 11ρρρρ (14) 在本文中,采用的是JAMENSON 有限体积法,为了减少存储的相关信息的量,其存储的方式选择的是按边存储的方法。
在存储的每条边的信息中,包含了这条边的边号,左右单元号和边的端点。
在计算通量时采用按边循环的方式:do I=1,nedgek=connmatrix(I,1) a=connmatrix(I,2) b=connmatrix(I,3) p=connmatrix(I,4)flux=function(k,a,b,p) sum(k)=sum(k)+flux sum(p)=sum(p)-flux end do这里给出的是FOTRAN 语言的形式,我编写采用的是C ,具体表现在上交的程序中。
在计算时间步长、人工耗散项等也可用象这样按边循环,从此处我们可以看出求解时与单元的形状无关。
四、人工耗散人工粘性模型对方法的成功应用起着关键作用,人工粘性抑制解在激波附近的振荡,又阻尼解在光滑区域的高阶误差,对解的线性稳定和收敛于定态是很重要的。
本文在方程(14)的右端加入了人工耗散项,如对于单元k ,其表达式可以表示为:()k k k k D Q dtdW Ω--= (15)在有限体积法中,耗散项的公式可以表示为:∑∑==+=kedgesi ikedgesi ik ddD 1)4(1)2( (16)其中:()()ik pii ii k p i i i W WdW W d 22)4()4()2()2(∇-∇=-=εαεα (17)其中的I 表示单元k 和p 的公共边,2∇定义为:()∑=-=∇kedges i k jk W WW 12(18)上面的j 表示与k 相邻的单元。
∑∑==+-=kedges i ik pkedgesi ik pk P PP P11)()(ν (19)),0max(),max()2()4()4()2()2(iii k p i kk εεννε-== (20)其中的量)4()2(,k k的围是:0.121,3212561)2()4(<<<<k k 。
在计算时发现上面方法得到的人工耗散项并不太适合。
其在光滑区域耗散项太大,而在大剃度区域又显得太小,为了弥补上面的不足,作下面的修改:kp k p i P P P P +-=ν (21)自适应系数为:),0max()2()4()4()2()2(iii i kk εενε-== (22)尺度系数为:()22y xcx V y U i ∆+∆+∆-∆=α (23)其中的U,V 表示边上的值,C 表示当地声速。
五、时间离散方程最后的稳定解是通过时间上的迭代得到的,可以写为:k kR dtdW = (24) 右边项的表达式为:()k k k k D Q R Ω--=/ (25)为了加速收敛,时间迭代使用的是4步龙—库塔推进格式。
格式如下:)4(1)1()0()()0(4..1.....W W to m for tR W WW W n m m m n==∆+==+-α (26)其中的n 表示的是当前的时间步,n+1表示的是新的时间步:()Ω--=)0()()(D Q Rm m (27)1,21,1,414321====αααα (28)为了减小计算时间,人工耗散项的计算只在第一步进行,在下面几步的迭代中保持不变。
运用上面的方法计算,可以发现CFL 数可以取到22,本文中使用的是2.0。
使用显示格式迭代的主要缺点是由于稳定区域的限制,所以不能使用过大的时间步长。
可以用近似的方法估算时间步长,对于任意形状的网格,可以使用下面的方法:()∑=∆+∆+∆-∆Ω=∆kedges i i iii i iik k y xc x V yU CFLt 122 (29)六、边界条件 1 固面边界条件对与无粘流动,固面边界条件无穿透条件,设其法向的速度通量为零,即0=i Z 。
由于压强项的影响,x -向和y -向的动量通量并不为零。
固面的压强近似的取为其相邻的单元的单元中心压强。
广泛的数值研究证明,如果贴近壁面的单元足够小,并且人工耗散项运用正确,用这种方法取得的压强对结果的精度不会产生太大的影响。
2 远场边界条件本文提到的远场,实际是人为的有界边界,对于流场中的扰动会传到很远的地方。
因而对于远场边界条件,情况比较复杂,它不能直接给定具体的流场值,需要与流场的值来共同确定远边场的流场值。
如果边界取得过小,则通常采用环量修正。
一般情况下,我们采用无反射边界条件。
为了保证扰动波不会反射回流场,应用A.Jamson 提出的远场边界法向一维特征分析方法,来建立无反射的远场边界条件。
一维均熵流动的Euler 方程可写成:0=++x t U U ρρρ (30)02=++x x t a UU U ρρ(31)这里,动量方程中除去了压强项,将上式写成矩阵形式为:0=∂∂+∂∂xw A t w (32) 这里:⎥⎦⎤⎢⎣⎡=U w ρ, ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=U a U A ρρ2(33) A 的特征值为:a U -=1λ,a U +=2λ因此,上式的两族特征线为:a U dtdx-= (34)a U dtdx+= (35) (34)为-C 特征线,(35)为+C 特征线。
沿-C ,+C 给出了众所周知的Riemann 不变量+R ,-R :12--=-γaq R n (36) 12-+=+γaq R n (37) 这里不变量-R ,沿入流特征线-C 是常数,可以用来流条件计算得到;+R 沿出流特征线是常数,可以用流场部向外插值计算:12--=∞∞-∞γa q R n (38)12--=-γene e a q R (39) 上式中下标“∞”表示来流值,下标“e ”表示以计算域部参数外插获得的值。
通过Riemann 不变量+R ,-R 的加减,可获得远场的法向速度n q 和音速a :()-∞++=R R q e n 21 (40) ()-∞+--=R Ra e 41γ (41)根据Riemann 不变量,按边界附近信息传播的性质把远场边界条件分成以下四种情况: A 、 亚音速入流条件()0<⋅n U ,它有三条入流特征线,需规定三个条件:()1212-+=-+∞γγa q a q n n (42) ()1212--=--∞γγaq a q n n (43) ∞=)(t t q q (44) ∞=s s (45)其中下标t 表示切向,n 代表方向,()∞代表自由流,()e 代表从流场到边界的外插值,上式的右端皆为已知,可解出边界上的s q c q t n ,,,值,再由s 和c 求出p 和ρ。
B 、 亚音速出流条件()0≥⋅n U ,它有一条入流特征线,需规定一个条件()1212--=--∞∞γγa q aq n n (46) ()1212-+=-+γγe e n n a q aq (47) e t t q q )(= (48) e s s =(49)C 、 超音速出流条件()0≥⋅n U ,无入流特征线,不需在边界上规定边界条件l W W = (50)其中的W 表示边上的守恒变量,l W 表示与此边相邻元素的守恒变量值。
D 、 超音速入流条件()0<⋅n U ,它有四条入流特征线,需规定全部四个条件∞=W W (51)其中的W 表示边上的守恒变量,∞W 表示来流值。
七、计算结果本文计算了三个算例,一个是攻角 0,马赫数0.80的情况,二是攻角25.1,马赫数0.80的情况,三是攻角2.5°,马赫数1.5的情况XY-10-50510-10-5510XY0.51-0.500.5翼型网格示意图 1.80.00=Ma ,=α表面压强系数分布 等压线等马赫线 压力云图马赫数云图升力系数 CL=-3.27408E-005 阻力系数 CD= 1.14998670E-002 2.80.025.1==Ma ,α上下表面压强系数分布图等压线图 等马赫图压力云图 马赫数云图升力系数为 CL =2.741130755E-001阻力系数为 CD=2.15905376E-0023.5.15.2==Ma ,α上下表面压强系数分布压力云图 马赫数云图升力系数为 CL= 0.1352582564阻力系数为 CD= 0.1037842242八、结论与展望本文主要介绍了求解二维非结构网格欧拉方程定常解的问题。