单斗正铲液压挖掘机工作装置设计综述
挖掘机工作机构的设计
摘要本文设计的是一种挖掘机的挖掘装置,在为工业、民用上有特殊用途的挖掘装载机,它可以用于煤矿井下狭小空间清理、装载、运输等工作,也可以用于冶金、矿山、隧道建设等场合的挖掘装载工作。
在本设计中,通过对国内外现有技术的了解和分析,利用任务书上所给定的挖掘机铲斗额定装载载荷,先计算出铲斗的斗容,而后选用标准容量铲斗,根据所选出的标准铲斗,计算出挖掘机的最大铲取阻力、最大卸载高度、最小卸载距离等一些设计所必需用到的量。
通过对工作机构上九个铰接点位置的确定来设计出动臂的模型及动臂上各点的受力,然后计算出举臂油缸和转斗油缸的内径、活塞杆的杆径,选出标准的液压缸。
关键词:铲斗;液压缸;动臂;挖掘机AbstractIn this paper, the design is a mini-excavators, as for the industry, there are special-purpose civilian loading machinery, it can be used in underground coal mines to clear a narrow space, loading, transport, etc., can also be used for metallurgy, mining, occasions, such as tunnel construction excavation work load.In this design, both at home and abroad through the understanding of existing technology and analysis, the use of task books given by the excavator bucket load rated load, calculate the first bucket of the bucket capacity, and then choose the standard size of the bucket, elected in accordance with standard bucket, to calculate the largest excavator shovel access resistance, the maximum unloading height, minimum distance, such as unloading the design used in the volume necessary. Through the work of nine institutions to determine the location of hinge points out to design the model and the moving arm arm stress points, and then calculate the fuel tank and to fight the diameter of the fuel tank, the rod diameter rod, the election a standard hydraulic cylinders.Keywords: bucket hydraulic cylinder boom excavator目录1绪论 (1)1.1课题背景及目的 (1)1.2 挖掘机发展简史 (1)1.3 挖掘机的基本类型 (1)1.4 国内外研究状况 (2)1.5 论文构成及研究内容 (3)2 总体方案设计 (4)2.1 工作装置构成 (4)2.2 动臂及斗杆的结构形式 (6)2.3 铲斗的结构选择 (6)2.4 液压挖掘机工矿分析 (6)2.5 液压挖掘机工作装置设计要求 (10)2.6 液压挖掘机工作装置的设计原则 (13)3工作装置运动学分析 (14)3.1 动臂运动分析 (14)3.2 斗杆的运动分析 (15)3.3 铲斗的运动分析 (16)3.4 特殊工作位置计算: (19)4 反铲装置的设计 (22)4.1 挖掘装载机工作装置典型工况分析确定 (22)4.2 挖掘装载机工作装置的基本参数的选择 (23)4.3 油缸基本参数的选择和计算 (29)5 挖掘装置受力计算和强度计算 (34)5.1、挖掘阻力的计算 (34)5.1.1铲斗挖掘阻力的计算 (34)5.1.2斗杆挖掘阻力计算 (35)5.2 工作液压缸的理论挖掘力 (35)5.2.1铲斗挖掘时,铲斗缸的理论挖掘力 (35)5.2.2斗杆挖掘时,斗杆油缸的理论挖掘力 (36)5.3 整机理论挖掘力 (36)5.3.2铲斗挖掘 (40)6 总结 (43)致谢 (44)参考文献 (45)1绪论1.1课题背景及目的挖掘机在国民经济建设的许多行业被广泛地采用,如工业与民用建筑、交通运输、水利电气工程、农田改造、矿山采掘以及现代化军事工程等等行业的机械化施工中。
正铲液压挖掘机工作装置尺寸设计与验证方法
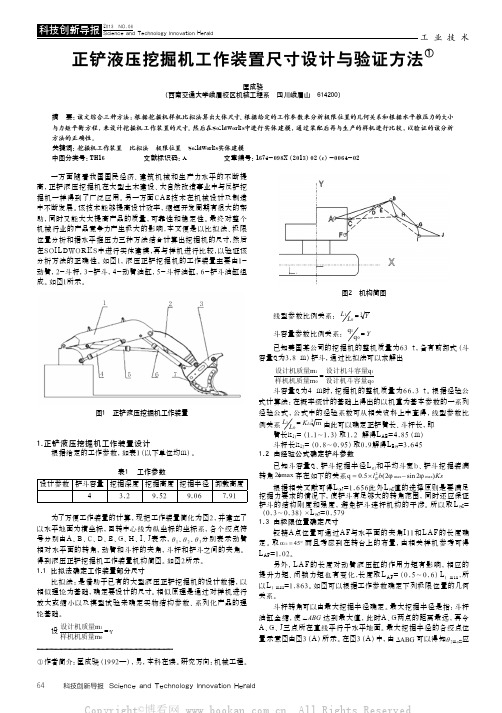
图1 正铲液压挖掘机工作装置1.正铲液压挖掘机工作装置设计根据给定的工作参数,如表1(以下单位均m)。
表1 工作参数设计参数铲斗容量挖掘深度挖掘高度挖掘半径卸载高度 4 3.29.529.067.91为了方便工作装置的计算,现把工作装置简化为图2,并建立了以水平地面为横坐标,回转中心线为纵坐标的坐标系,各个绞点符号分别由A、B、C、D、E、G、H、I、J表示,θ1、θ2、θ3分别表示动臂相对水平面的转角,动臂和斗杆的夹角,斗杆和铲斗之间的夹角。
得到液压正铲挖掘机工作装置机构简图。
如图2所示。
1.1 比拟法确定工作装置部分尺寸比拟法:是借助于已有的大型液压正铲挖掘机的设计数据,以相似理论为基础,确定要设计的尺寸。
相似原理是通过对样机进行放大或缩小以及模型试验来确定实物结构参数、系列化产品的理图2 机构简图线型参数比例关系:31YLL=斗容量参数比例关系:Y=1qq已知美国某公司的挖掘机的整机质量为63 t,备有前卸式容量q为3.8 m)铲斗,通过比拟法可以求解出11qqmm设计机斗容量设计机斗容量样机机质量设计机质量=图3 极限位置关系222max 2max ()arccos[]2gi A ab bg ab bgL L R L X L L θ+−−−=××max R 为最大挖掘半径取9.06 m 代入解得θ2m a x =115 °。
同理可以根据最小挖掘半径求出θ2M I N =43 ° L 2 m i n =2.392、L 2 max =4.00根据最大挖掘高度求得L AGM A X =7.19、θ1M A X =82.3 °根据最大挖掘深度求得θ1M A X =64.9 °2.由水平推压力确定L BE 的尺寸假设挖掘机的工况作业为水平推压,及铲斗斗底紧贴地面沿停机面向前运动。
首先隔离斗杆和铲斗,如图图4 挖掘机受水平推压力对F点取力矩建立平衡方程:F 2e 2+F’3e’3=F a r 2图5 挖掘机转配图如图,根据以上所计算得到的尺寸值在Sol idworks建立三维装配图模型,并附上适当的转动和移动副,通过鼠标移动挖掘机的各个部件位置即可大致检测出设计的工作尺寸是否合理。
液压挖掘机正铲工作装置装设计.
太原科技大学本科毕业设计说明书EXS 3500液压挖掘机正铲工作装置装设计The Working Device Design of EXS 3500 Crawler Face-shovel Bucket Hydraulic Excavator学院 (系 :机械工程学院专业:机械制造及自动化(工机学生姓名:学号:指导教师:史青录评阅教师:完成日期:2015.06.15太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文任务书(由指导教师填写发给学生学院(直属系 :机械工程时间: 15年 3月 9 日摘要挖掘机械是工程作业机械的一种重要类型,是开挖土石方的主要机械设备,正铲单斗液压挖掘机是一种以铲斗进行挖掘作业并采用液压传动的机械设备。
工作装置是液压挖掘机的执行机构,从总体来看常见的正铲工作装置属于平面连杆机构,铲斗、动臂和斗杆之间采用铰接的方式,在液压缸推力的作用下各部件围绕铰接点摆动,完成卸土、挖掘和提升等动作,常用的液压挖掘机的工作装置有正铲,反铲,装载, 抓斗和起重装置。
本次设计主要内容是 EXS 3500正铲液压挖掘机工作装置的设计,主要对挖掘机工作装置机构的几何参数进行计算设计,采用合适的调整方法使其达到设计要求;对动臂、斗杆进行强度校核和载荷分析,使其满足使用要求。
在本次设计中应该注意工作装置设计的原则,在满足各部件要求的条件下实现6.06米最大挖掘深度, 15.81米最大挖掘半径, 12.42米最大卸载高度, 17.17米最大挖掘高度, 以实现挖掘的功能。
关键词:设计;挖掘机;强度校核;正铲工作装置the Working Device Design of EXS 3500 Crawler Face-shovel Hydraulic ExcavatorAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.The design principal is to design an EXS 3500 crawler face-shovel hydraulic excavator working device. And major working device geometry parameters are designed; checked hydraulic cylinder locking power .Use the appropriate method of adjustment to meet the requirement. Check boom and rod strength to meet the requirements.Design principles work should be noted in the design of device. all components must be meet the conditions, machine for maximum digging depth of 6.06 meters, radius of the largest mining of 15.81 meters, uninstall the greatest height of 12.42 meters, maximum cutting height of 17.17 meters, to achieve the functions of excavation.Keyword :Design;Excavator; Strength Check; face-shovel working device目录摘要 . (II)Abstract .................................................................................................................................I II 第 1章引言 ........................................................................................................................ 1 1.1挖掘机和工作装置概述 . .................................................................................... 1 1.2国内外研究现状 . ................................................................................................ 1 1.3液压挖掘机的发展前景 . .................................................................................... 2第 2章原始数据及设计要求 ............................................................................................ 4 2.1原始参数 . ............................................................................................................ 4 2.2工作装置设计原则 . ............................................................................................ 5第 3章工作装置总体方案选择 ........................................................................................ 6 3.1工作装置构成 . .................................................................................................... 6 3.2动臂及斗杆的结构形式的初选 . ........................................................................ 7 3.3动臂与动臂油缸的布置 . .................................................................................... 7 3.4铲斗与铲斗油缸的连接方式 . ............................................................................ 8第 4章工作装置机构参数的选择 .................................................................................... 9 4.1最大挖掘深度1h 校核 (10)4.2最大挖掘高度2h 校核: (11)4.3最大卸载高度3h 校核 (13)4.4最大挖掘半径1r 校核 (14)4.5斗杆最大挖掘力aF 校核 (15)4.6铲斗最大挖掘力bF 校核 .................................................................................. 17第 5章工作装置运动分析及包络图的绘制 .................................................................. 19 5.1动臂运动分析 . .................................................................................................. 19 5.2斗杆运动分析 . .................................................................................................. 20 5.3包络图的绘制 . .................................................................................................. 21第 6章工作装置主要部件的结构校核 .......................................................................... 23 6.1斗杆 . .................................................................................................................. 23 6.1.1工况一 ........................................................................................................ 23 6.1.2工况二 ........................................................................................................ 26 6.2动臂 . .................................................................................................................. 28 6.2.1工况一 ........................................................................................................ 29 6.2.2工况二 ........................................................................................................ 31 6.3销轴校核 . .......................................................................................................... 33总结 . ......................................................................................................................................34EXS 3500液压挖掘机正铲工作装置装设计参考文献 (35附录A 文献翻译原文 (36附录B 文献翻译中文 (44致谢 (49第1章引言1.1挖掘机和工作装置概述挖掘机在农田水利以及快速抢修等物料挖掘、搬移方面以及机场、港口、矿山、油田、城乡建设中得到了充分的利用,发挥了其他机械不可替代的关键作用。
液压挖掘机液压系统设计说明书

前言挖掘机作为一种多功能机械产品,目前被广泛应用于水利工程,交通运输,电力工程和矿山采掘等机械施工中。
它能在减轻繁重的体力劳动,保证工程质量,加快工程建设速度以及提高劳动生产率方面起着十分重要的作用。
近年从国内情况来看,我国的挖土机市场90%被外国独资或合资企业垄断,我国挖土机行业整体发展水平较国外缓慢,在挖土机液压系统方面的理论还相对国外比较薄弱。
国内大部分挖土机企业在挖土机液压系统传统技术方面的研究具有一定基础,但由于采用传统液压系统的挖土机产品在性能、质量、作业效率、可靠性等方面均较差,因此采用传统液压系统的挖土机在国内市场上基本失去了竞争力。
液压系统是挖土机的核心部分,通过挖土机液压系统设计计算优化能有效的提高挖土机性能,本挖土机具有工作可靠、结构简单、性能好、成本低、效率高等特点。
我国是一个发展中国家,在辽阔的国土上正在进行大规模的经济建设,这就需要大量的土石方施工机械为其服务,而液压挖掘机是最重要的一类土石方施工机械。
因此,可以肯定液压挖掘机的发展空间很大.可以预见,随着国家经济建设的不断发展,液压挖掘机的需求量将逐年大幅度增长.今后几年我国液压挖掘机行业将会有一个很大的发展,液压挖掘机的年产量将会以高于20%的速度增长。
本设计根据给定的工作要求进行工况分析,以确定系统的主要参数,对液压系统的基本回路的方案进行分析,拟订液压系统原理图;选择液压元件并进行液压系统的性能验算,最后完成工作图,编制技术文件。
希望本设计能为从事液压工作的人员献上微薄之力!摘要液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
液压挖掘机利用液压元件(液压泵、液压马达、液压缸等)带动各种构件动作,具有许多优点。
它对液压系统的设计提出很高的要求,其液压系统也是工程机械液压系统中最为复杂的。
因此,对挖掘机液压系统的分析设计对推动我国挖掘机发展具有十分重要的意义。
在搜集了国内外挖掘机液压系统相关资料的基础上,了解了挖掘机液压系统的发展历史,并对挖掘机液压系统的技术发展动态进行了分析总结.本次毕业设计课题是挖掘机液压系统的设计。
挖掘机工作装置设计
目录1绪论 (3)1.1课题背景及目地 (3)1.2国内外研究状况 (3)1.3 课题研究方法 (4)1.4 论文构成及研究内容 (4)2总体方案设计 (4)2.1 工作装置构成 (5)2.2 动臂及斗杆地结构形式 (6)2.3 动臂油缸与铲斗油缸地布置 (7)2. 4 铲斗与铲斗油缸地连接方式 (7)2.5 铲斗地结构选择 (8)2.6 原始几何参数地确定 (9)3 工作装置运动学分析 (9)3.1 动臂运动分析 (10)3.2 斗杆地运动分析 (11)3. 3 铲斗地运动分析 (12)3.4 特殊工作位置计算: (16)4基本尺寸地确定 (19)4.1 斗形参数地确定 (19)4.2 动臂机构参数地选择 (19)4.2.1 α1与A点坐标地选取 (19)4.2.2 l1与l2地选择 (20)4.2.3 l41与l42地计算 (20)4.2.4 l5地计算 (20)4.3 动臂机构基本参数地校核 (22)4.3.1 动臂机构闭锁力地校核 (22)4.3.2 满斗处于最大挖掘半径时动臂油缸提升力矩地校核 (24)4.3.3 满斗处于最大高度时,动臂提升力矩地校核 (25)4.4 斗杆机构基本参数地选择 (25)4.5 铲斗机构基本参数地选择 (27)4.5.1 转角范围 (27)4.5.2 铲斗机构其它基本参数地计算 (27)5工作装置结构设计 (29)5.1斗杆地结构设计 (29)5.1.1 斗杆地受力分析 (29)5.1.2 结构尺寸地计算 (38)5.2动臂结构设计 (40)5.2.1第一工况位置 (40)5.2.2 第二工况位置: (45)5.2.3内力图和弯矩图地求解: (48)5.3 铲斗地设计 (53)5.3.1铲斗斗形尺寸地设计 (53)5.3.2铲斗斗齿地结构计算: (54)5.3.3 铲斗地绘制: (54)6 销轴与衬套地设计 (56)6.1 销轴地设计 (56)6.2 销轴用螺栓地设计: (56)6.3 衬套地设计: (57)7 总结 (57)参考文献 (58)致谢 ............................................... 错误!未定义书签。
单斗液压挖掘机总体与工作装置设计说明
单斗液压挖掘机总体及工作装置的设计1导言1.1设计主题的意义我国是一个发展中国家,在广袤的土地上从事大规模的经济建设,需要大量的土方工程机械为其服务,而液压挖掘机是土方工程机械中最重要的一种。
因此,可以肯定的是,液压挖掘机有很大的发展空间。
可以预见,随着国民经济建设的不断发展,液压挖掘机的需求将逐年大幅增长。
未来几年,中国液压挖掘机行业将有较大发展,液压挖掘机年产量将增长20%以上。
自1997年以来,中国挖掘机市场进入快速发展期。
与2000年相比,中国挖掘机的产销量分别增长了55%和56%。
截至2002年8月底,中国挖掘机的销量已经超过13000台,超过了2001年的销量。
显然,挖掘机是整个工程机械行业发展最快的车型之一。
挖掘机最重要的是工作装置的设计。
由于挖掘机的工作装置最能体现机器的工作能力和工作寿命,因此设计工作可靠、性能良好、成本低、效率高、维修和使用方便的工作装置就显得尤为重要。
1.2国外液压挖掘机的发展趋势和研究现状早在设计液压挖掘机工作装置时,设计人员通过类比、查表、理论计算初步确定性能参数后,仍需花费大量时间分析设计的合理性,计算量大。
而且在设计过程中,大多选取几个特殊位置进行复核计算,精度当然较低。
如今,计算机在机械设计中得到了广泛的应用,挖掘机工作装置的设计也得到了迅速的发展。
关于液压挖掘机工作装置CAD软件的研究已经很多。
1.2.1国外液压挖掘机的发展趋势和研究现状挖掘机在国外有着悠久的生产历史,液压挖掘技术的不断成熟带动了挖掘机的全面发展。
德国是世界上最早开发和研究挖掘机的国家。
1954年和1955年,德国DeMark公司和Liebohr公司分别研制出全液压挖掘机。
美国是继德国之后声场挖掘机历史最长、数量最多、品种最多、技术水平领先的国家。
日本的挖掘机制造业是在二战后发展起来的,其主要特点是在引进消化先进技术的基础上,通过大胆创新发展起来的。
中国液压挖掘机生产的后起之秀。
单斗挖掘机正铲的工作原理
单斗挖掘机正铲的工作原理
单斗挖掘机是一种常见的工程机械设备,广泛应用于建筑、道路施工和矿山开采等领域。
其工作原理主要涉及铲斗的工作机构和液压系统。
1. 铲斗工作机构:
单斗挖掘机的铲斗工作机构主要包括斗杆、斗臂、铲斗等部分。
斗杆通过连接设备的主机和斗臂之间,可以实现对斗臂的升降和旋转。
斗臂则可实现对铲斗的伸缩和翻斗。
铲斗的设计使其具备捡取、挖掘和卸载物料的功能。
2. 液压系统:
单斗挖掘机的液压系统为其提供动力,主要包括液压泵、液压缸、液压阀等部分。
液压泵通过泵送液体(常为油)为整个液压系统提供所需的动力。
液压泵将液体压力转化为机械能,驱动液压缸实现铲斗的升降、旋转、伸缩和翻斗等功能。
液压阀则负责控制液压系统中的液体流动方向、流量和压力等参数。
工作原理概括为:通过液压泵将液体压力转化为机械能,并通过液压系统将这种机械能传递到铲斗工作机构,使其实现升降、旋转、伸缩和翻斗等动作,从而实现挖掘、装载和装卸物料的功能。
单斗液压挖掘机工作装置设计
第一章绪论1. 1 液压挖掘机的组成、分类、作用和特点挖掘机由转台及转台上部机构、底架及行走系、与工作装置等三大部分构成。
转台上布置了发动机、主轴泵及驾驶室等,经由回转滚盘装在底架之上。
工作装置的动臂铰支于转台上。
转台可绕底架的垂直面内绕其铰点作一定的转动。
它的工作过程是以铲斗的切削刃切削土壤,铲斗装满后提升、回转至卸土位置,卸空后的铲斗再回到挖掘位置并开始下一次的作业。
因此,液压挖掘机是一种周期作业的土方机械。
【7】液压挖掘机的分类有很多种:根据行走装置传动型式分:全液压式,半液压式;根据不同的行走系分:履带式、轮胎式、汽车式和悬挂式;根据主要用途和工作装置的不同分:通用型和专用型;根据工作装置的结构不同分:铰接式和伸缩臂式等。
挖掘机械在建筑机械发展中占有很大比重和重要的地位,是重点发展的机械品种之一、尤其是中小型、通用的单斗挖掘机不仅用于土石方的挖掘工作,而且通过工作装置的更换,还可以用作起重、装载、抓取、打桩、钻孔等多种作业,它在各种工程施工中用途更大,已成为机械化施工中广泛使用的不可缺少的机械设备。
由于液压挖掘机具有质量小,挖掘力大,工作平稳,效率高,操纵灵活,机动性好等优点,单斗液压挖掘机由于在动力装置和工作装置之间采用容积式液压传动,靠液体的压力能进行工作,因此,与机械传动相比有许多优点:能无级调速且调速范围大(最高与最低速度之比可达1000:1);能得到较低的稳定转速(采用柱塞式油马达,稳定转速可低到1转/分);快速作用时,液压元件产生的惯性较小,并可作高速反转(电动机回转部分的起动力矩比其工作力矩大50%,而油马达则不大于5%)。
加速中等功率电动机需1秒钟到数秒钟,而加速油马达只需0.1秒;传动平稳,结构简单,可吸收冲击和振动;操纵省力,易实现自动化控制;易实现标准化、通用化、系列化。
单斗液m液压挖掘机斗齿切削力为12~压挖掘机与同级机械传动挖掘机相比,挖掘力高30%左右(如:1.0315吨,而同级机械传动挖掘机只有10吨左右)。
正铲液压挖掘机工作装置构型综合与优化设计
正铲液压挖掘机工作装置构型综合与优化设计正铲液压挖掘机是一种广泛应用于工程施工和矿山开采中的重型机械设备。
它主要由工作装置、驱动装置和控制装置组成。
工作装置是挖掘机的核心部件,对挖掘机的性能和效率有着重要影响。
工作装置由起降臂、铲斗和斗杆等部件组成。
其结构设计直接影响挖掘机的工作性能、稳定性和精度。
因此,对于正铲液压挖掘机工作装置的构型综合与优化设计具有重要的研究意义。
目前,正铲液压挖掘机工作装置的构型设计主要遵循以下原则:一是结构简单、紧凑,以提高挖掘机的工作效率;二是工作装置的刚度要足够高,以确保挖掘机在工作时的稳定性;三是铲斗的容积要足够大,以提高挖掘机的装载能力。
为了实现正铲液压挖掘机工作装置的优化设计,工程师们采用了多种方法。
首先,他们运用计算机辅助设计软件,通过建立三维模型和进行数值模拟,对不同构型进行仿真分析,以找出最优的设计方案。
其次,他们进行了大量的实地试验,通过对挖掘机在实际工作中的表现进行观察和测量,不断改进设计方案。
最后,他们还参考了现有的正铲液压挖掘机工作装置的设计经验,吸取其优点,并加以改进。
在正铲液压挖掘机工作装置构型综合与优化设计中,还需要考虑一些重要的因素。
首先是挖掘机的工作环境。
挖掘机主要应用于土方工程和矿山开采等领域,其工作环境十分恶劣,包括高温、低温、潮湿、粉尘等。
因此,在工作装置的设计中需要考虑抗腐蚀、防尘和防水等措施。
其次是挖掘机的工作负荷。
挖掘机在工作时需要承受巨大的力和冲击。
工作装置的结构必须具有足够的强度和刚度,以保证其在工作时的稳定性和可靠性。
另外,挖掘机的作业效率也是需要考虑的因素。
设计者需要根据挖掘机的作业要求和材料特性,合理确定起降臂的长度和角度,以及铲斗的形状和容积,以提高挖掘机的作业效率。
通过对正铲液压挖掘机工作装置的构型综合与优化设计的研究,可以提高挖掘机的工作效率、稳定性和精度。
在未来的研究中,可以进一步探索新的设计思路和方法,以提高挖掘机的性能和适应性,满足不同工作条件下的需求。
单斗液压挖掘机设计说明书
机械原理课程设计说明书设计题目正铲液压挖掘机工作装置设计院(系、部)工业设计专业25010801班设计者宁维宁彭丹陈冬指导教师张伟社2010年12月31日目录一、设计题目 (1)1-1机构简介 (1)1-2设计数据 (2)二、设计内容 (2)2-1铲斗运动机构设计 (2)2-2工作装置运动分析 (5)2-2-1分析动臂运动规律 (8)2-2-2分析斗尖V的运动规律 (9)2-3 工作装置受力分析 (9)2-3-1 机构受力分析 (9)2-3-2 油缸油的压力变化分析 (13)三、验算结果 (14)四、设计总结 (20)五、参考文献 (21)一、设计题目正铲液压挖掘机工作装置设置1-1机构简介正铲挖掘机工作装置运动简图如图1-1所示,由动臂1,斗杆2,铲斗3,铲斗油缸4,动臂油缸6,斗杆油缸5,等组成。
在机构的运动过程中,要求铲斗在其工作空间实现挖掘抬起、倾倒等各种各样的位置。
铲斗做水平面运动,有三个自由度,铲斗运动靠铲斗油缸通过连杆机构实现。
铲斗油缸4的一端与斗杆在G 点铰接,另一端与三角架NHM 在M 点铰接。
铲斗油缸伸缩时,三角架NHM 绕斗杆上N 点转动,借以完成破碎、装斗、调整切削角、卸载等动作。
动臂和动臂油港在转台上的铰接点分别为C 和A ,他们的位置用直角坐标表示如图1-2所示。
D 、E 分别为斗杆油缸与动臂和斗杆的铰接点。
图1-1 机构简图(动臂1,斗杆2,铲斗3,铲斗油缸4,斗杆油缸5,动臂油缸6,三角架7)1-2 设计数据 各个杆的长度参数如图1-2所示,油缸参数如下所示。
图1-2 尺寸图表1-1 油缸参数油缸名称工作压力/MPa 全缩时长度/mm全伸时长度/mm 行程/mm动臂油缸28 1580 2660 1080斗杆油缸28 1600 2660 1060铲斗油缸28 1400 2320 920二、设计内容2-1 铲斗运动机构设计(1)分析提示:铲斗运动机构可视为六杆机构,斗杆可被视为机架,油缸、三角架MHN、连杆HK及铲斗为活动构件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
正铲液压挖掘机工作装置设计摘要液压挖掘机是一种应用广泛的多功能的建设施工机械,作为工程机械的主力机种。
由于液压挖掘机具有多品种,多功能,高质量及高效率等特点,因此受到了广大施工作业单位的青睐,其生产制造业也日益蓬勃发展。
液压挖掘机主要有发动机、液压系统、工作装置、回转装置、行走装置和电器控制等部分组成。
本文主要研究其工作装置。
挖掘机的主要工作就是土壤的挖掘。
工作装置是直接完成挖掘任务的装置,许多挖掘机发达的国家广泛采用新技术、新方法来不断地提高液压挖掘机的作业性能和生产率。
正铲装置的各组成部分有各种不同的外形,要根据设计要求选用适合的结构并对其作运动分析。
然后,在满足机构运动要求的基础上对各机构参数进行理论计算,确定各机构尺寸参数,确定挖掘机正铲装置的基本轮廓。
挖掘阻力和挖掘力是衡量挖掘机性能参数的重要性能指标,对其分析计算至关重要。
挖掘阻力主要与挖掘对象及自身尺寸参数有关,而挖掘力则受众多条件限制,危险工况的分析是关键点。
在挖掘力分析基础上,可对各杆件铰接点进行力的分析计算,并进行机构设计的合理性分析。
关键词:正铲挖掘机,工作装置,平面连杆机构,运动分析第二章液压正铲挖掘机工作装置的总体设计2.1 液压正铲挖掘机的基本组成和工作原理液压正铲挖掘机由工作装置,上部转台和行走装置三大部分组成,如图 2.1 所示。
其中上部转台包括动力装置、传动机构的主要部分、回转机构、辅助设备和驾驶室;工作装置由动臂、斗杆、铲斗及动臂油缸、斗杆油缸、铲斗油缸组成,如图 2.2 所示。
图 2.1 液压正铲挖掘机的基本组成图 2.2 液压正铲挖掘机工作装置挖掘作业时,操纵动臂油缸使动臂下降至铲斗接触挖掘面,然后操纵斗杆油缸和铲斗油缸,使斗进行挖掘和装载工作。
铲斗装满后,操纵动臂油缸,使铲斗升高离开挖掘面,在回转马达的驱动下,使铲斗回转到卸载地点,然后操纵斗杆和铲斗油缸使铲斗转动至合适位置,再回缩开斗油缸转动铲斗,使斗前、斗后分开卸载物料。
卸载后,开斗油缸伸长使斗前、斗后闭合,将工作装置转到挖掘地点进行第二次循环挖掘工作。
转移工作场地时,操纵行走马达,驱动行走机构完成移动工作[4]。
在实际挖掘作业中,由于土质情况、挖掘面条件以及挖掘机液压系统的不同,反铲装置三种液压缸在挖掘循环中的动作配合可以是多样的、随机的。
上述过程仅为一般的理想过程。
2.2 工作装置结构方案的确定正铲工作装置的构造:正铲工作装置由动臂、斗杆、铲斗、工作液压缸和连杆机构等组成。
动臂是焊接的箱形结构,由高强度钢板焊成,也有的是铸造的混合结构,和反铲工作装置相比,正铲动臂较短且是单节的。
动臂下端和转台铰接,动臂油缸一般为双缸,在布置上动臂的下铰点高于动臂油缸的下铰点且靠后。
这种布置方案能保证动臂具有一定的上倾角和下倾角,以满足挖掘和卸载的需要,同时也保证动臂机构具有必要的提升力矩和闭锁力矩。
斗杆也是焊接箱形结构或铸造混合结构。
斗杆的一端与动臂的上端铰接,斗杆油缸的两端分别与动臂和斗杆的下缘铰接,形成了斗杆机构。
由于正铲常以斗杆挖掘为主,这样的结构布置适合于向前推压,液压缸大腔进油可以发挥较大的挖掘力。
正铲斗铰接在斗杆的端部,铲斗油缸的两端分别与斗杆中部和连杆装置连接,形成转斗机构,一般为六连杆机构。
有时铲斗缸的活塞杆直接和铲斗铰接形成四连杆机构。
挖掘机正铲的铲斗根据结构和卸土方式可分为前卸式和底卸式两大类。
前卸式铲斗卸土时直接靠铲斗油缸使斗翻转,土镶从斗的前方卸出。
这种构造简单,斗体是整体结构,刚度和强度都比较好,并且不需要另设卸土油缸,但是为了能将土卸尽,要求卸土时前壁与水平夹角大于45度,因而要求铲斗的转角加大,结果导致所需的铲斗油缸功率增加,或者造成转斗挖掘力下降或卸土时间延长。
此外,前卸式铲斗还影响有效卸载高度。
底卸式铲斗靠打开斗底卸土。
所示的铲斗是靠专门的油缸起闭斗底。
挖掘时斗底关闭,卸土时斗底打开,土城从底部卸出。
这类结构的卸土性能较好,要求铲斗的转角也小,但必须增设卸土油缸,此外,斗底打开后也影响到有效卸载高度。
这类开斗方式现在已少用,目前挖掘机上采用较多的是另一种底卸式铲斗,铲斗由两半组成,靠上部的铰连接。
卸土油缸装在斗的后壁中。
油缸收缩时通过杠杆系统使斗前壁(顺板)向上翘起,将土壤从底部卸出。
用这种方式卸载,卸载高度大,卸载时间较短,装车时铲斗得以更靠近车休并且还可以有控制地打开额板,使土或石块比较缓慢地卸出,因而减少了对车辆的撞击,延长了车辆的使用寿命。
另外这种斗还能用于挑选石块,很受欢迎,但铲斗的重量加大较多,因而在工作装置尺寸、整机稳定性相同的情况下斗容量有所减少,并且由于斗由两部分组成,受力情况较差。
采用底卸式铲斗结构,铲斗的转角可以减小,因而有些挖掘机已取消了铲斗油缸的连杆装置,铲斗油缸直接与斗体相连接,简化了结构,并在一定程度上加大了转斗挖掘力[5]。
当挖掘机挖掘比较松软的对象、或用于装载散粒物料时,正铲斗可以换成装载斗,在整机重量基本不变的情况下,这种斗的容量可以大大增加,因而提高了生产率。
装载斗一般都是前卸式,不装斗齿,以减小挖掘松散物料时的挖掘阻力。
本设计中我采用图2.3这一结构。
图 2.3 液压正铲挖掘机结构图 2.4 液压正铲挖掘机机构简图图2.4所示是5 m3正铲挖掘机工作装置的示意图,采用直动臂、直斗杆形式,铲斗为前卸式。
动臂和动臂油缸在转台上的铰点分别为C 和A ,它们的位置以停机面为X 轴,整机回转中心线为Y 轴(图b)的直角坐标值来表示。
这台挖掘机的主要工作油缸共5只,其中动臂油缸两只,置于动臂的两侧;斗杆油缸一只,置于斗杆的中部;铲斗油缸两只,铰于斗杆中部。
主要工作油缸的主要参数列于表2—1中。
表 2.1 5m 3正铲液压挖掘机主要油缸的主要参数第三章 液压正铲挖掘机工作装置机构运动学分析3.1动臂运动分析动臂CF 的位置由动臂油缸AB 的长度1L 决定。
1L 和动臂水平倾角1θ之间的关系可用下式表示()112175272521cos 2a a l l l l L +--+=θ (2-1)11257212527112cos a a l l L l l -+⎪⎪⎭⎫ ⎝⎛-+=∴-θ (2-2) 从上式看出,a 11-a 2对1θ的影响很大,当动臂和油缸的参数不变时,a 11-a 2愈大动臂提升高度愈小。
设动臂油缸全缩时动臂倾角为min 1θ;动臂油缸全伸时动臂倾角为max 1θ,那么在动臂油缸由全缩到全伸,动臂总的转角为:min 1max 11θθϕ-= (2-3)为了便于运算和比较,仍用无因次比例系数σρλ、、表示,即min 1max 1L L =λ;5min 1l L =ρ;57l l =σ (2-4) 代入式(2—2)可以得到动臂油缸全缩和全伸时相应的动臂倾角值112221min 21cos a a -+⎪⎪⎭⎫ ⎝⎛-+=-σρσθ (2-5) 1122221max 21cos a a -+⎪⎪⎭⎫ ⎝⎛-+=-σρλσθ (2-6) 而动臂总转角为⎪⎪⎭⎫ ⎝⎛-+-⎪⎪⎭⎫ ⎝⎛-+=--σρσσρλσϕ21cos 21cos 22122211 (2-7) 动臂油缸伸缩时对C 点的力臂也在不断变化,由图可知BCA l l L e ∠⋅⋅=sin 5711⎪⎪⎭⎫ ⎝⎛-+⋅=∴5721255715712arccos sin l l L l l L l l e (2-8) 显然,当AB ⊥AC 时1e 有最大值,此时5max 1l e =,而相应的油缸长度1L '为:1L '=2527l l -此时的动臂倾角为11275arccos a a l l -+='θ 若用动臂油缸相对力臂(即)m ax 11e e 来表示油缸长为1L 时的力臂,则⎪⎪⎭⎫ ⎝⎛-+=5721252717max 112arccos sin l l L l l L l e e (2-9) 综上所述,动臂倾角1θ、力臂1e 和max 11e e 都是1L 的参数。
3.2斗杆运动分析斗杆FQ 的位置由动臂CF 和斗杆油缸DE 的长度2L 所决定。
但是动臂的位置随动臂油缸的伸缩而变化,为了便于分析斗杆油缸对头杆位置的影响,假定动臂不动,那么斗杆铰点F 以及斗杆油缸在动臂上的铰点D 就可以看作为固定基座。
2L 与斗杆、动臂夹角2θ之间的关系为()34298292822cos 2a a l l l l L -+⨯⨯-+=θ (2-10)349822292822arccos a a l l L l l +-⎪⎪⎭⎫ ⎝⎛⋅⋅-+=∴θ (2-11)设斗杆油缸全缩时动臂与头杆的夹角为min 2θ,全伸时为max 2θ,那么当油缸由全缩到全伸时斗杆总的转角为min 2max 22θθϕ-= (2-12)斗杆油缸的作用力臂2e 也是可变值。
DFE l l L e ∠⋅⋅=sin 9822)2csc sin(982229282982l l L l l os ar L l l e -+⋅=∴ (2-13) 当EF ⊥DE 时2e 有最大值,即92l e =,这时相应的油缸长度2L '为29282l l L -='相应的斗杆转角为43892arccos a a l l -+='θ(2-14) 用斗杆油缸相对力臂值(即max22e e )来表示2L 时的力臂,则)2csc sin(9822292828max 22l l L l l os ar L l e e ⋅⋅-+=∴(2-15)2.3.3斗齿尖的几种特殊工作位置的计算上图为正铲挖掘机作业范围图,以下为几种特殊工作位置的分析与计算。
(1)最大挖掘半径(图2.5)这时C 、Q 、V 在同一条水平线上,而且斗杆油缸全伸,即max 22θθ=;⎪⎪⎭⎫ ⎝⎛==max 2max 442251sin arcsin θθl l a ;283a +=πθ 最大挖掘半径为C X l l R ++=3max 44max (2-16)最大挖掘半径处的挖掘高度相应为CR Y H =图 2.5 最大挖掘半径(2)最大挖掘高度(图2.6)图 2.6 最大挖掘高度最大挖掘高度为:()C Y l a l H ++-=326max 1max 44max 2sin θ (2-17)最大挖掘高度时的挖掘半径()26max 1max 442cos a l X R C H -⋅+=θ (2-18)如果最大转斗角度不能保证QV 垂直向上,即21max 325θθπθ--<,则应根据实际的max 3θ值求相应的挖掘高度,如图左上角所示,此时()C Y l a l H +-+++-=πθθθθ2sin )sin(max 3max 2max 1326max 1max 442 (2-19)(3)最大挖掘深度(图2.7)这时动臂油缸全缩,头杆FQ 及QV 垂直向下,即min 11θθ=,min 122θπθ-=,πθ=3。