激光干涉仪原理介绍
激光干涉仪的原理
激光干涉仪的原理
激光干涉仪的工作原理主要基于试验光线和参考光线间的相干干涉现象。
通过干涉方式,可以直接或间接地测定物质的光学性质和几何参数,如折射率、厚度、温度、压力、振动、应力等。
首先,由激光源发出的激光经过分光器被分成两束。
一束作为参考光定向传播,另一束作为试验光无规则传播。
由于试验光经过物质介质后,其相位会发生改变,而参考光的相位则保持不变。
当参考光和试验光在相干条件下汇聚到一点时,两束光波的相位差就会在图像中形成干涉暗纹和亮纹。
干涉图案由于光波的干扰而产生。
当两束光的光程差为整数倍的波长时,干涉图案呈现亮纹。
当光程差为半整数倍的波长时,干涉图案呈现暗纹。
通过观察和分析这些干涉纹,可以精确地测定物质的光学性质和几何参数。
激光干涉仪的优点在于其测量的精度和灵敏度都非常高。
可以实现纳米级甚至皮米级的测量精度,广泛适用于国防科技、生命科学、物理化学、微电子制造等各个科技领域。
要点: 1) 激光干涉仪通过激光干涉的原理来测定物质的光学性质和几何参数;2) 激光干涉仪的测量精度和灵敏度都非常高,可达到纳米级甚至皮米级。
激光干涉信号的原理和应用

激光干涉信号的原理和应用1. 前言激光干涉信号是指在激光干涉实验中观察到的光强干涉信号。
激光干涉信号的产生和分析对于精密测量和光学仪器的研发具有重要意义。
本文将介绍激光干涉信号的原理和应用。
2. 原理激光干涉信号的产生是基于光的干涉原理。
当两束相干光相遇时,由于它们的光程差的改变而产生光强的干涉效应。
在激光干涉实验中,通常使用的是Michelson干涉仪。
该干涉仪由一个分束器和两个反射镜组成。
其中一束激光被分束器分成两束,然后通过两个反射镜反射回来,重新合并成一束光。
当两个反射镜的位置发生微小改变时,这个干涉信号就会发生变化。
3. 应用激光干涉信号的应用非常广泛,下面将介绍其中几个常见的应用领域。
3.1 波长测量激光干涉信号可以用于测量激光的波长。
通过将激光束分成两束,然后调节其中一束的光程差,观察干涉信号的变化,可以计算出激光波长的精确值。
这种方法在激光器的研发和制造中非常重要。
3.2 表面形貌测量激光干涉信号可以用于测量物体的表面形貌。
通过将激光束照射到表面上,观察干涉信号的变化,可以推断出表面的形状。
这种方法在精密制造、工程测量等领域得到广泛应用。
3.3 光学元件测试激光干涉信号可以用于测试光学元件的质量和精度。
通过将激光束通过待测试的光学元件,观察干涉信号的变化,可以评估光学元件的性能。
这种方法在光学仪器的研发和制造中非常重要。
3.4 光学波前调控激光干涉信号可以用于光学波前的调控。
通过调节激光束的光程差,可以改变干涉信号的形状和强度,从而实现光学波前的调控。
这种方法在自适应光学、光学成像等领域得到广泛应用。
4. 总结激光干涉信号是基于光的干涉原理产生的一种光强干涉信号。
它的产生和分析对于精密测量和光学仪器的研发非常重要。
激光干涉信号的应用领域广泛,包括波长测量、表面形貌测量、光学元件测试和光学波前调控等。
通过对激光干涉信号的研究和应用,可以推动光学技术的发展和应用的进一步创新。
激光干涉仪工作原理
激光干涉仪工作原理
激光干涉仪是一种用于测量光程差的仪器,基于激光干涉原理。
其工作原理如下:
1. 激光发生器产生一束单色、相干、准直的激光光源。
2. 光源经过分束器后,被分为两束光线,各自经过不同的光路。
3. 分别经过不同的光路后,光线再次汇聚在一个检测平面上,形成干涉条纹。
4. 当两束光线的光程差为整数倍的波长时,即满足相干条件,干涉条纹会呈现明暗交替的条纹图案。
5. 通过调节其中一条光路的长度,即可改变光程差,从而改变干涉条纹的位置和形态。
6. 引入被测物体时,可以通过测量光程差的变化来获取被测物体的形貌或长度等信息。
7. 干涉条纹的观察可以使用目视或使用光电探测器等设备进行记录和分析。
激光干涉仪广泛应用于光学、物理、电子等领域中的测量和检测工作中,可以用于精密测量、表面形貌测量、物体位移测量等。
其主要优点包括高分辨率、非接触性、非破坏性等。
激光干涉仪测量方法
或 =∑
某一目标位置的反向偏差为 ,即
= ↑- ↓
沿轴线或绕轴线的各目标位置的反
在某一目标位置的单向定位标准不确定度的估算值为 ↑ 或 ↓即
↑=
∑(
)
()
或
=
(
∑
)
(
)
某一目标位置的单向重复定位精度为 ↑或 ↓,即
↑ = 4 ↑或 ↓ = 4 ↓
( 3) 确定采集移动方式采集数据方式有两种:一种是线性循环
采集方法,另一种是线性多阶梯循环方法。GB17421 评定标准中采用 线性循环采集方法。测量移动方式: 采用沿着机床轴线快速移动,分 别对每个目标位置从正负两个方向上重复移动五次测量出每个目标 位置偏差,即运动部件达到实际位置减去目标位置之差。
(图2) ( 2) 确定测量目标位置根据GB17421 评定标准中规定,机床规 格小1 000mm 取不少于10 个测量目标位置,大于1 000mm 测量目标 位置点数适当增加,一般目标值取整数,但是我们建议在目标值整数 后面加上三位小数。主要考虑机床滚珠丝杠的导程及编码器的节距所 产生的周期误差,同时也考虑机床全程上各目标位置上得到充分地采 集。
沿轴线或绕轴线的任一位置 的重复定位精度的最大值。即
R↑ = max [ ↑],R↓ = max [ ↓]
R = max [ ] 轴线单向定位精度A↑或A↓,即 A↑ = max [ + 2 ↑] - min [ - 2 ↑] 或 A↓ = max [ ↓ + 2 ↓] - min [ ↓ - 2 ↓] 轴线双向定位精度A,即 A = max [ ↑ + 2 ↑; ↓ + 2 ↓] - min[ ↑ - 2 ↑;
( 4) 评定方法采用双向计算方法进行评定机床的位置精度。目
激光干涉仪原理及应用
激光干涉仪原理及应用
激光干涉仪是一种利用激光光束干涉现象进行测量和检测的仪器。
它利用激光的单色性、相干性和定向性等特点,通过激光光束的干涉现象来测量光线的相位和波前差,从而达到测量目的。
激光干涉仪的原理和应用都具有重要的科学研究价值和实际应用意义。
激光干涉仪的原理可以简单描述为:两束激光光束通过分束器分开,分别在一边经过样品(或目标物)后再次合并在一起,然后通过干涉物后进入光电探测器进行信号采集。
当两束光经过样品后的相位有差异时,就会产生干涉,形成干涉条纹。
通过观察和分析干涉条纹的变化,可以得到样品的相关信息,如形状、厚度、折射率等。
激光干涉仪的原理中,常见的有两种干涉方式,即自由空间干涉和光纤干涉。
自由空间干涉指的是激光光束在空气中进行干涉,可用于测量样品的曲率、平面度、倾斜度等参数。
而光纤干涉则是将激光光束传输到光纤中进行干涉,可用于对光纤的插入损耗、光纤传输的延迟等进行测量。
激光干涉仪的应用非常广泛。
首先,在科学研究中,激光干涉仪可用于测量光学元件的表面形貌,如透镜、棱镜等,以及光学薄膜的厚度和折射率。
其次,激光干涉仪在工业领域中也得到广泛应用,如测量金属工件的平面度、光滑度等,以及检测半导体器件的曲率、形状等。
此外,激光干涉仪还可用于测量纳米颗粒、生物细胞和薄膜等微小尺度的物体,应用于生物医学领域,如细胞生长的监测、精确测量等。
总之,激光干涉仪作为一种精密测量和检测仪器,在科学研究和工业应用中具有重要意义。
其原理的理解和应用的熟练掌握可推动光学测量和微纳技术的发展,为实现精确测量和控制提供基础和技术支持。
详解激光干涉仪工作原理

详解激光干涉仪工作原理
干涉仪是以激光波长为已知长度、利用迈克耳逊干涉系统测量位移的通用长度测量工具。
激光干涉仪有单频的和双频的两种。
单频的是在20 世纪60 年代中期出现的,最初用于检定基准线纹尺,后又用于在计量室中精密测长。
双频激光干涉仪是1970 年出现的,它适宜在车间中使用。
激光干涉仪在极接近
标准状态(温度为20℃、大气压力为101325 帕、相对湿度59%、CO2 含量0.03%)下的测量精确度很高,可达1 乘以10。
单频激光干涉仪
图1 为单频激光干涉仪的工作原理。
从激光器发出的光束,经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而产生干涉条纹。
当可动反射镜移动时,干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉冲信号,经整形、放大后输入可逆计数器计算出总脉冲数,再由电子计算机按计算式[356-11]
计算式
式中λ为激光波长(N 为电脉冲总数),算出可动反射镜的位移量L。
使用单频激光干涉仪时,要求周围大气处于稳定状态,各种空气湍流都会引起直流电平变化而影响测量结果。
单频激光干涉仪原理图
双频激光干涉仪
图2 为双频激光干涉仪的工作原理。
在氦氖激光器上,加上一个约0.03 特斯。
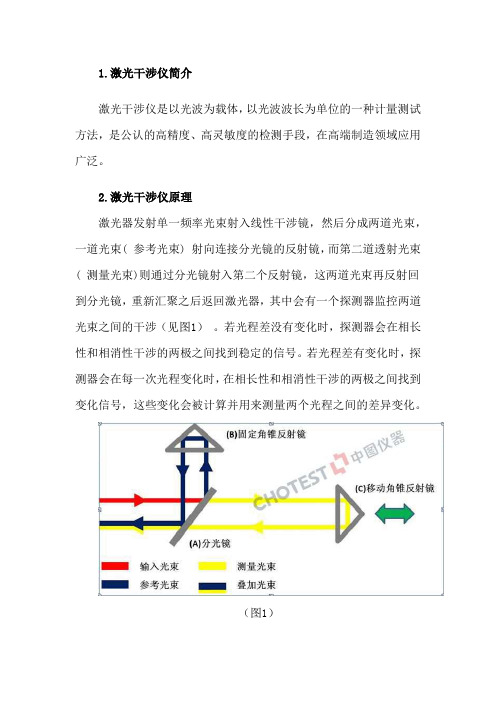
激光干涉仪原理

激光干涉仪原理
激光干涉仪是一种利用激光干涉现象进行测量的仪器。
其原理基于激光的相干性,通过将激光分成两束并使其相互干涉,从而获得待测物体的形状、尺寸等信息。
激光干涉仪由激光源、分束器、反射镜、检测器等主要组成。
激光源产生高强度、单色、相干性极好的激光束。
通过分束器,激光束被分成两束:参考光束和测量光束。
参考光束经过反射镜,反射回检测器。
测量光束则经过一系列光学元件,照射到待测物体上并反射回检测器。
在检测器上,参考光束和测量光束会发生干涉现象。
干涉引起的光强变化将被转换为电信号。
通过处理检测器输出的电信号,我们可以得到待测物体的干涉图样,从而获得其形状、尺寸等信息。
由于激光干涉仪具有高精度、高灵敏度等优点,在工业制造、光学测量等领域得到广泛应用。
需要注意的是,在激光干涉仪中,要确保激光束的相干性,以保证干涉现象的有效发生。
因此,在仪器的设计和操作中,要考虑消除外界干扰、控制光程差等因素,以提高测量的准确性和可重复性。
激光干涉仪原理介绍——线性测量与回转轴校准(图文并茂)

现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
回转轴校准测量步骤
典型测试(步距为5°)的步骤如下: 1. 将XR20-W定位在被测轴上并调整激光系 统的准直(如右图所示)。 2. 在轴的起始位置将激光装置置零,在计算 机上开始采集数据并运行数控程序。 3. 轴到达起始目标位置,记录激光读数。 4. 被测轴以5°步距移至第二个目标,XR20-W 内置的反射镜反向旋转5°。 5. 系统结合XL-80与XR20-W的读数,记录被 测轴在5°的位置误差。 6. 通过使回转轴依次到达一系列测量点, 可测量并绘出轴的总体精度图。
机械与汽车工程学院
激光的产生
LASER是Light Amplification by Stimulated Emission of Radiation 的缩写,意为通过受激发射线的放射达到光的放大,即激光。 大多数现代位移干涉仪都使用氦氖 (He-Ne) 激光管,这些激光管具 有633纳米 (nm) 的波长输出 氦氖激光管的构成如下所示:
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
激光及其特点 激光输出可视为一束正弦波。
波长
激光具有三个重要特性:
•激光波长非常稳定,可以精密测量测量的要求。 •激光波长非常短,可以用于高精度测量。 •激光具有干涉特性。
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
光的干涉
•当相位角相差180°(半个波长)时,复合光强为0,产生暗条纹。
现代集成制造与数控装备研究所 CIMS
机械与汽车工程学院
二、激光干涉测量原理
XL-80激光测量回路如下
•如果测量光路长度改变(角 锥反射镜C移动),干涉光束 的相对相位将改变,由此产 生的相长干涉和相消干涉的 循环将导致叠加光束强度的 明暗周期变化。 • 角锥反射镜每移动316 nm, 就会出现一个光强变化循环 (明-暗-明)通过计算这 些循环来测量移动。 • 通过在这些循环之间进行相 位细分,实现更高分辨率 (1 nm) 的测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相消干涉
如果相位相反,则光波会相互抵消,表现为 暗条纹。
6/10/2020 Slide 6
apply nnovation
线性测量原理
安装方式:
6/10/2020 Slide 7
apply innovation
线性测量光路图
固定反射镜和分光 镜
• The detection unit detects these changes and converts them to a reading that is proportional to the change in relative path length.
6/10/2020 Slide 2
apply innovation
基本概念—机床精度的21项误差
For Linear measurement (3): xdx ydy zdz
For Angular measurement (9): Ax Bx Cx Ay By Cy Az Bz Cz
For Straightness measurement (6): xdy xdz ydx ydz zdx zdy
For Squareness measurement (3) XZ, XY, YZ
6/10/2020 Slide 3
apply innovation
基本概念 – 激光及其特点
– 激光输出可视为一束正弦波.雷尼绍XL-80所用的激光的波长是633nm. Wavelength
6/10/2020 Slide 4
6/10/2020 Slide 17
apply innovation
直线度测量
6/10/2020 Slide 18
apply innovation
直线度测量
6/10/2020 Slide 19
apply innovation
直线度测量
Wollaston 棱镜
6/10/2020 Slide 20
激光头
光线 1
光线 2
直线度反射镜
apply innovation
直线度测量
Wollaston 棱镜
6/10/2020 Slide 21
激光头
光线 1
(加长)
光线 2
(缩短)
直线度反射镜
移动方向
apply innovation
直线度测量
• The easiest way to understand how the system detects straightness deviations is to imagine what happens to the relative path lengths of Beam 1 and Beam 2 if the straightness reflector moves sideways
移动反射镜
6/10/2020 Slide 8
激光头
apply innovation
线性测量原理
– 激光头
B (固定反射镜)
C (移动反射镜)
6/10/2020 Slide 9
输出光 反射光
A (分光镜)
测量光 汇合光
– 从激光头发出的激光被分光镜(A)分为2束光。 – 一束光经过固定的反射镜形成参考光. – 另一束激光经过移动的反射镜 (C) 形成测量光.
• As the reflector is moved upwards, Beam path 1 gets longer and Beam path 2 gets shorter
• This change in the relative path lengths causes a change in the interference signal intensity as the interference cycles between constructive and destructive interference.
6/10/2020 Slide 13
ISO 230-2 (1997)-
ASME B5.54 -
BS 3800
-
JIS B6330
-
GB 10931-89 -
VDI 3441
-
E60-099
-
International U.S.A. U.K. Japan China Germany France
apply innovation
–反射光和测量光经过分光镜后汇合,并且彼此干涉.
apply innovation
线性测量原理
参考光:固定不动
测量光:随着反射镜的移动而移动
移动反射 镜
6/10/2020 Slide 10
相长干涉
如果两束光相位相同,则光波会叠加增强, 表现为亮条纹。
相消干涉
如果相位相反,则光波会相互抵消,表现 为暗条纹。
apply innovation
激光干涉仪原理介绍
雷尼绍青岛办------韩克新
6/10/2020 Slide 1
apply innovation
基本概念 – 激光干涉仪 • 什么是激光干涉仪:
利用激光作为长度基准,对数控设备(加工中心、三 座标测量机等)的位置精度(定位精度、重复定位 精度等)、几何精度(俯仰扭摆角度、直线度、垂 直度等)进行精密测量的精密测量仪器。
角度测量
安装方式
6/10/2020 Slide 14
apply innovation
角度测量
激光头
6/10/2020 Slide 15
固定干涉镜
移动反射镜
apply innovation
角度测量
激光头
6/10/2020 Slide 16
固定干涉镜
移动反射镜
apply innovation
角度测量
– 激光具有三个重要特性:
•激光波长非常稳定,可以精密测量测量的要求。 •激光波长非常短,可以用于高精度测量。 •激光具有干涉特性。
apply innovation
基本概念 – 激光的产生
6/10/2020 Slide 5
apply innovation
基本概念— 激光的干涉特性
+
+
+
-
=
=
相长干涉
apply innovation
线性测量原理
6/10/2020 Slide 11
激光干涉仪通过接收到的激光的明暗条 纹变化,再通过电子细分,从而知道距 离的细微和准确变化。
+
+
+
-
=
=
apply innovation
线性测量
6/10/2020 Slide 12
apply innovation
激光干涉仪测量与国际标准