机械原理课后答案——第十章_机械的平衡2222
西工大教材-机械原理各章习题及答案
电动机所需的功率为
p = ρ • v /η = 5500 ×1.2 ×10−3 / 0.822 = 8.029(KW )
5-8 在图示斜面机构中,设已知摩擦面间的摩擦系数 f=0.2。求在 G 力作用下(反行程),此斜面 机构的临界自锁条件和在此条件下正行程(在 F 力作用下)的效率。 解 1)反行程的自锁条件 在外行程(图 a),根据滑块的平衡条件:
解 1 ) 取 比 例 尺 μ 1 = 1mm/mm 绘 制 机 构 运 动 简 图 ( 图 b )
(a)
2 )计算该机构的自由度
n=7
pι=9
ph=2(算齿轮副,因为凸轮与齿轮为一体) p’=
F’= F=3n-2pe-ph
=3x7-2x8-2 =1
G7
D 64 C
EF
3
9
B
2
8
A
ω1
b)
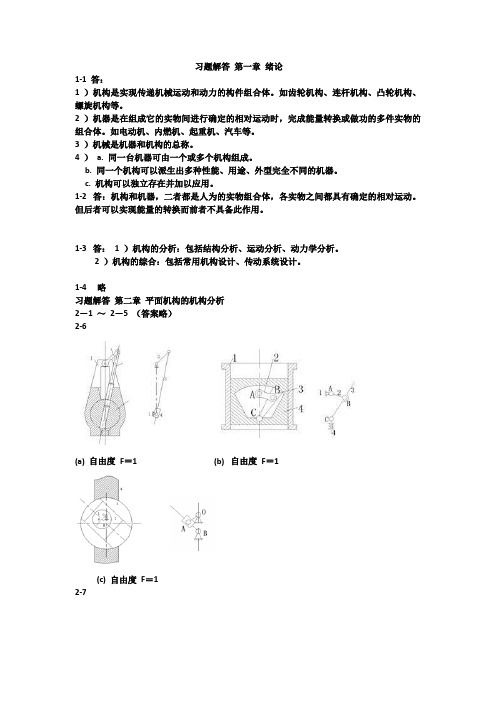
2-6 试计算如图所示各机构的自由度。图 a、d 为齿轮一连杆组合机构;图 b 为凸轮一连杆组合 机构(图中在 D 处为铰连在一起的两个滑块);图 c 为一精压机机构。并问在图 d 所示机构中, 齿轮 3 与 5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目是否相同?为什么?
C3 重合点继续求解。
解 1)速度分析(图 b)取重合点 B2 与 B3,有
方向 大小 ?
v vv vB3 = vB2 + vB3B2 ⊥ BD ⊥ AB // CD ω1lAB ?
D
C
3 d3
ω3
4
ω3 90°
2
B(B1、B2、B3)
ω1
A1 ϕ = 90°
机械原理课后答案
习题解答第一章绪论1-1 答:1 )机构是实现传递机械运动和动力的构件组合体。
如齿轮机构、连杆机构、凸轮机构、螺旋机构等。
2 )机器是在组成它的实物间进行确定的相对运动时,完成能量转换或做功的多件实物的组合体。
如电动机、内燃机、起重机、汽车等。
3 )机械是机器和机构的总称。
4 )a. 同一台机器可由一个或多个机构组成。
b. 同一个机构可以派生出多种性能、用途、外型完全不同的机器。
c. 机构可以独立存在并加以应用。
1-2 答:机构和机器,二者都是人为的实物组合体,各实物之间都具有确定的相对运动。
但后者可以实现能量的转换而前者不具备此作用。
1-3 答:1 )机构的分析:包括结构分析、运动分析、动力学分析。
2 )机构的综合:包括常用机构设计、传动系统设计。
1-4 略习题解答第二章平面机构的机构分析2-1 ~2-5 (答案略)2-6(a) 自由度F=1 (b) 自由度F=1(c) 自由度F=12-7题2 -7 图F =3 × 7 -2 × 9 -2 =12 -8a) n =7 =10 =0 F =3×7-2×10 =1b) B 局部自由度n =3 =3 =2 F=3×3 -2×3-2=1c) B 、D 局部自由度n =3 =3 =2 F=3×3 -2×3-2 =1d) D( 或C) 处为虚约束n =3 =4 F=3×3 -2×4=1e) n =5 =7 F=3×5-2×7=1f) A 、B 、C 、E 复合铰链n =7 =10 F =3×7-2×10 =1g) A 处为复合铰链n =10 =14 F =3×10 -2×14=2h) B 局部自由度n =8 =11 =1 F =3×8-2×11-1 =1i) B 、J 虚约束C 处局部自由度n =6 =8 =1 F =3×6 -2×8-1=1j) BB' 处虚约束A 、C 、D 复合铰链n =7 =10 F =3×7-2×10=1 k) C 、D 处复合铰链n=5 =6 =2F =3×5-2×6-2 =1l) n =8 =11 F =3×8-2×11 =2m) B 局部自由度I 虚约束4 杆和DG 虚约束n =6 =8 =1 F =3×6-2×8-1 =12-9a) n =3 =4 =1 F =3 × 3 -2 × 8 -1 =0 不能动。
机械原理(第二版)课后答案(朱理主编)

机械原理作业(部分答案)第一章结构分析作业1.2 解:(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。
(b)F = 3n-2P L-P H = 3×5-2×6-2= 1B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:第二章运动分析作业2.1 解:机构的瞬心如图所示。
2.2 解:取mmmm l /5=μ作机构位置图如下图所示。
1.求D 点的速度V D13P D V V =而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=⨯==2. 求ω1s rad l V AE E /25.11201501===ω3. 求ω2因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=⨯==ωω 4. 求C 点的速度V Csmm C P V l C /2.10154446.0242=⨯⨯=⨯⨯=μω2.3 解:取mmmm l /1=μ作机构位置图如下图a 所示。
1. 求B 2点的速度V B2V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3V B3 = V B2 + V B3B2大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得:mmpb 223= ,所以smm pb V v B /270102733=⨯=⨯=μ由图a 量得:BC=123 mm , 则mmBC l l BC 1231123=⨯=⨯=μ3. 求D 点和E 点的速度V D 、V E利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:mmpd 15=,mmpe 17=,所以smm pd V v D /1501015=⨯=⨯=μ , smm pe V v E /1701017=⨯=⨯=μ;smm b b V v B B /17010173223=⨯=⨯=μ4. 求ω3s rad l V BC B /2.212327033===ω5. 求n B a 222212/30003010smm l a AB n B =⨯=⨯=ω6. 求3B aa B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?方向 B →C ⊥BC B →A ⊥BC ∥BC 22233/5951232.2s mm l a BCn B =⨯=⨯=ω223323/11882702.222s mm V a B B k B B =⨯⨯=⨯=ω取mms mm a 2/50=μ作速度多边形如上图c 所示,由图量得:mmb 23'3=π ,mmb n 20'33=,所以233/11505023's mm b a a B =⨯=⨯=μπ2333/10005020's mm b n a at B =⨯=⨯=μ7. 求3α233/13.81231000s rad l a BC tB ===α8. 求D 点和E 点的加速度a D 、a E利用加速度影像在加速度多边形,作e b 3'π∆∽CBE ∆, 即 BE eb CE e CB b 33''==ππ,得到e 点;过e 点作⊥3'b π,得到d 点 , 由图量得:mm e 16=π,mmd 13=π,所以2/6505013s mm d a a D =⨯=⨯=μπ ,2/8005016s mm e a a E =⨯=⨯=μπ 。
机械原理课后习题答案.pdf

[解]
(1)取μι作机构运动简图;
μl
=
0.002
m mm
C3
lBC =
l
2 AB
+
l
2 AC
−
l AB
⋅ lAB
⋅ cos135
= 302 + 1002 − 30 ×100 × cos135 = 123 (mm)
B
D
2
1 ω1
A
ϕ1
4
E
(2)速度分析 取C为重合点:C( C2, C3)
vB → vC 2 → vD ,vE → ω2
p(c3)
ω2
2
D
c2
2) 求aC2
aC 2 = aB
+ aCn 2B
+
at C 2B
=
aC 3
+
aCk
2C 3
+ aCr 2C 3
方向: B→A C→B ⊥CB
0 ⊥CБайду номын сангаас向下 ∥BC e
大小: √ √
?
0√
?
E
d
b
其中:
an C 2B
= ω2 2
lBC
=
2.02
4
C P34
1
A P12
题3-1 试求图示各机构在图示位置时全部瞬心。
b) P13
P34 B
3
P 23 →∞
2
P12
A
4
C P14→∞
P24
1
题3-1 试求图示各机构在图示位置时全部瞬心。
c)
P13 P14 C
4
→∞ P 34
M
vM
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后习题答案部分)

第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
机械原理第十章习题答案
第十章 齿轮机构及其设计习题10-21解:1) 因为7692.06550cos ===K b K r r α, 故压力角452439715.3900'''==K α展角:1375.06932.08307.0tan =-=-==K K K K inv αααθ曲率半径:mm r K b K 535.418307.050tan =⨯==αρ2) 087273.050==K θ,根据渐开线函数表,有 图10-21 ()25434087223.0087273.0087223.0087925.0455*******'''=---+'=K α mm r r K b K 860.6082155.050cos ===α习题10-23 解:分度圆半径:mm mz r 3923262=⨯== 齿顶圆半径:mm mh r r a a 42339*=+=+=基圆半径:mm r r b 648.3620cos 39cos 0=⨯==α 齿廓在齿顶处压力角:0241.2942648.36arccos arccos ===a b a r r α 齿廓在分度圆处曲率半径:mm r 339.1320sin 39sin 0=⨯==αρ齿廓在齿顶处曲率半径:mm tg tg r a b a 516.20241.29648.360=⨯==αρ习题10-25解:基圆节距mm L L p b 914.5512.27426.3356=-=-= 模数mm p m b 003.220cos 1415.3914.5cos 0=⨯==απ 取标准模数mm m 2=。
习题10-26解:中心距()()()5059157001221121112=+⨯=+=⇒+=i m a z mz i a大齿轮齿数:9055091122=⨯==z i z 小、大齿圆分度圆直径为 mm mz d 25055011=⨯==,mm mz d 45059022=⨯==小、大齿轮齿顶圆直径为()mm h z m d aa 2605522*11=⨯=+=,()mm h z m d a a 4605922*22=⨯=+= 小、大齿轮基圆直径为mm d d b 923.23420cos 250cos 01===α,mm d d b 862.42220cos 450cos 02===α 分度圆上齿厚及齿槽宽mm m p s e 854.72514159.322=⨯====π习题10-27 解:齿根圆直径与基圆直径重合时,有()**02220cos c h z m mz a --= 齿数为()46.41229397.015.220cos 122**0**=--=-=-+=c h z m c h z a a 当齿数大于41齿时,齿根圆直径大于基圆直径。
《机械原理》第十章 平面机构的平衡
转子的平衡精度,而应以满足实际工作要求为度。为此,对
不同工作要求的转子规定了不同的许用不平衡量,即转子残 余不平衡量。
许用不平衡量有两种表示方法:
1. 用许用质径积[mr](单位g.mm)表示 此表示比较直观,便于平衡操作。 2. 用偏心距[e] (单位mm)表示 [e] = [mr]/m
设计机构时,可以通过构件的合理布置、加平衡质量或加平 衡机构的方法使机构的总惯性力得到完全或部分平衡。
一、完全平衡法 1)四杆机构的完全平衡 将构件2的m2用集中于
B、C 两点的两个质量代换;
m2B = m2 lCS’2/ lBC m2C = m2lBS’2/ lBC 在构件1和3的延长线上各加一平衡质量,使其质心分 别移到固定轴A和D处: m’=(m2BlAB+m1lAS’1)/r ’
平面机构惯性力的平衡条件
对于活动构件的总质量为m、总质心S的加速度为as的机 构,要使机架上的总惯性力F 平衡,必须满足:
m 0 as=0 F mas 0
机构的总质心S 匀速直线运动或静止不动。
质心不可能作匀速直线 运动
欲使as=0, 就得设法使总 质心S 静止不动。
-F"
平衡原理
F1
F = F1 + F2 F1 L1 = F2L2 可解得 L2 F1 = F L L1 F2 = F L
(1) (2)
Ⅰ
F
F2
Ⅱ
(3) (4) F' L1 F" L2
将力F平行分解到两个平衡基面 上,得F1和F2 ,即 F = F1 + F2 F1 L1 = F2 L2 即 F1 = -F'
机械原理习题答案第十章
机械原理习题答案第十章10-1 试求出题10-1图中机构的最小传动角和最大压力角。
解:(a )、4583.01202530sin max =+=+=BC AB l e l α 所以最大压力角?==28.274583.0arcsin max α 最小传动角?=?-?=-?=72.6228.279090max min αγ (b )、最大压力角?=0max α最小传动角?=?-?=-?=9009090max min αγ10-2 标出题10-2图所示机构在图示位置的传动角。
解:(a)对于该机构,在滑块C处有一传动角c γ,如图所示;在滑块D处也有一传动角D γ,如图所示。
(b)从动件4受到的驱动力是由构件3提供的。
构件4的速度v 很好确定,而构件3作用于构件4的驱动力的方向的确定应当按照下面的步骤进行:①根据构件3上受有三个力、三个力应当汇交于一点可以确定出构件4作用在构件3上的力;②根据作用力和反作用力的关系,确定出构件3作用在构件4上的力的方向。
maxα?=0αB '题10-1图Fv Dγ)(a DF Dv图示机构在图示位置的传动角γ分别如图中所示。
10-5 标出题10-5图中各个凸轮机构在图示位置时的压力角。
凸轮为主动件。
解:图中各个凸轮机构在图示位置时的压力角α如图所示。
)(b nnn=0αααvv vnnnn α题10-5图10-6 在题10-6图中,凸轮为主动件,画出凸轮逆时针转过30o 时机构的压力角。
解:利用反转法,即将凸轮固定、机架和从动件沿与凸轮转向相反的方向运动,固定铰链点A 从点A “反转”到点A ’,从动件从AB 运动到A ’B ’,再由点B ’的速度方向和从动件的受力方向确定出凸轮逆时针转过30o时机构的压力角α,如图所示。
原教材6-8 在题6-8图中凸轮为半径为R 的圆盘,凸轮为主动件。
(1)写出机构的压力角α与凸轮转角之间的关系;(2)讨论如果][αα≥,应采用什么改进设计的措施?解:(1)、当凸轮转动任意角δ时,其压力角α如图所示。
机械原理课后习题答案
(2) 当取杆1为机架,将演化成何种机构?这时C、D是整转副还是摆动副;
(3) 当取杆3为机架,将演化成何种机构?这时A、B是整转副还是摆动副
解: (1) 28+72≤52+50且l1=28;曲柄摇杆机构; θ=19; φ=71;γmin={51,23}=23; K=1.236;
C2
2
C
B
1
3
A4
D
试用瞬心法求:
(1) φ=165°时,点C的速度VC;
C
(2) 当VC=0时,φ的值。
设计步骤: ①作φ=165°时四杆机构位置图;p相对瞬心
B
lPA=96,lPD=216,∠CDP=42 ° LPA*ω2=lPD*ω4;ω4=4.44; VC=lCD*ω4=400mm/s
ω2 A
φ
D
② 60+120≤90+120且lAB=60;曲柄摇杆机构;
C、D摆动副; (3)杆3不与最短杆1相联;双摇杆机构; A、B整转副;
2
C
B
1
3
A4
D
机械原理 作业
第3章 平面连杆机构
3-12:偏置曲柄滑块机构。已知: 曲柄l1=20,连杆l2=70,偏距e=10mm 求:1)曲柄为原动件,滑块行程H,极位夹角θ,机构最大压力角;
2)滑块为原动件,机构死点位置;
图a,b,c:K = 4*(4-1)/2 = 6;图d: K = 3*(3-1)/2 =3
P12,P24
P24 →∞
P23
P12,P13
P23
P14
P34,P13
P14
P34 →∞
P14,P13
P12
P23 →∞