平面弯曲问题
第1节 平面弯曲的概念和实例
第七章 直梁弯曲时的内力和应力
第七章 直梁弯曲时的内力和应力
第七章 直梁弯曲时的内力和应力
二、静定梁的基本形式 梁的支座形式:工程中常见的梁的支座有以下三 种形式。 1)固定铰支座:如图a所示,固定铰支座限制梁在 支承处任何方向的线位移,其支座反力可用两个正 交分量表示,即沿梁轴线方向的 FAx 和垂直于梁轴 线方向的FAy。
第七章 直梁弯曲时的内力和应力
第一节
平面弯曲的概念和实例
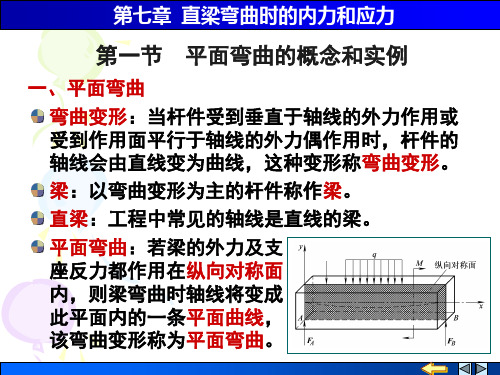
一、平面弯曲 弯曲变形:当杆件受到垂直于轴线的外力作用或 受到作用面平行于轴线的外力偶作用时,杆件的 轴线会由直线变为曲线,这种变形称弯曲变形。 梁:以弯曲变形为主的杆件称作梁。 直梁:工程中常见的轴线是直线的梁。 平面弯曲:若梁的外力及支 座反力都作用在纵向对称面 内,则梁弯曲时轴线将变成 此平面内的一条平面曲线, 该弯曲变形称为平面弯曲。
或
第七章 直梁弯曲时的内力和应力 2)活动铰支座:如图b所示,活动铰支座只能限制 梁在支承处垂直于支承面的线位移,支座反力可用 一个分量FRA表示。 3)固定端支座:如图c所示,固定端支座限制梁在 支承处的任何方向线位移和角位移,其支座反力有 两个正交力FAx、FAy和一个力偶分量MA。
或
MA
第七章 直梁弯曲时的内力和应力 静定梁的形式:根据梁的支座情况,工程中常见 的静定梁可以简化成以下三种形式。 1)简支梁:梁的支座一端是 固定铰支座,另一端是活 动铰支座。 2)外伸梁:梁的支座与简支 梁相同,只是梁的一端或 两端伸出在支座之外。 3)悬臂梁:梁的一端自由, 另一端是固定支座。
第七章 直梁弯曲时的Biblioteka 力和应力三、梁上载荷的简化
1)集中力:集中力作用在梁上的很小一段范围内, 可近似简化为作用于一点,如图所示的力F。单位 为牛顿(N)或千牛顿(kN)。 2)集中力偶:作用在微小梁段上的力偶,可近似 简化为作用于一点,如图所示的力偶M。单位为牛 顿· 米(N· m)或千牛顿· 米(KN· m)。 3)分布载荷:沿梁轴线方 向、在一定长度上连续分布 的力系,如图所示的均布载 荷q。其大小用载荷集度表 示,单位为牛顿/米(N/m) 或千牛/米(kN/m)。
弹性力学:平板弯曲问题的有限元分析(1)

平板弯曲问题的有限元分析(1) Kirchhoff弹性薄板理论
参考文献: “弹性力学(下册)”第13章。徐芝纶
x
2w
2 (z2
2
2
)dz 4
E 3 12(1 2 )
x
2w
(c)
同样,在y为常量的截面上,每单位宽度内的 y , yx , yz
也分别合成如下的弯矩,扭矩,和横向剪力:
M y
2 2
z
y dz
E
12(1
3
2
)
(
2w y2
2w x2
)
(d)
M yx
2
2
z yxdz
E 3 12(1 2 )
(9-6)
( z )z q
(f)
2
将(9-6)式代入薄板上板面的边界条件:
得:
E
12(1
3
2
)
4
w
q
(9-7)
或 D4w q, (9-8)
其中
D
E
12(1
3
2
)
(9-9)
薄板的弹性曲面微分方程
为薄板的弯曲刚度
§9-3 薄板横截面上的内力
► 薄板横截面上的内力,称为薄板内力,是指薄板横截面的单 位宽度上,由应力合成的主矢量和主矩。
对z积分,得到: z
2(1 2 )
2
( 4
z
z2 )4w 3
F3 (x,
弯曲-理论力学,经典

②精确适用于纯弯曲梁;
③对于横力弯曲的细长梁(跨度与截面高度比l/h>5),
上述公式的误差不大,但公式中的M应为所研究截面
上的弯矩,即为截面位置的函数。
M ( x) y 1 M ( x) , Iz ( x) EI z
26 材料力学多媒体_孙艳 例题
b III、三种典型截面对中性轴的惯性矩 1.矩形截面 h
2qa 2qa FS图
2qa2
M图
6qa2
15 材料力学多媒体_孙艳 例题
Ⅱ、平面曲杆 面内受力时的内力——轴力、剪力、弯矩 弯矩的符号约定——使杆的曲率增加(即外侧受拉) 为正 作平面曲杆内力图的约定与刚架相同。 F m B m
A
材料力学多媒体_孙艳
R
O
16 例题
例 一端固定的四分之一圆环,半径为R,在自由端 B受轴线平面内的集中荷载F作用如图,试作出其内 力图。 F h F m FS( B m FN( z M R ( A O O 解:取分离体如图写出其任意横截面m-m上的内力 方程: FN F sin 0 π/2
E
E
A
ydA E I yz 0
E
Sz 0
中性轴z通过截面形心
(2) M y
A
zydA
(3) M z y dA
A
E
A
y dA
2
E
Iz M
M EI z
24
1
材料力学多媒体_孙艳
例题
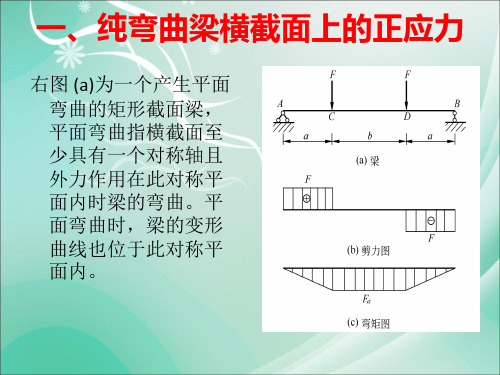
4.纯弯曲梁横截面上的应力(弯曲正应力):
My ①距中性层y处的应力: Iz ②梁的上下边缘处,弯曲正应力取得最大值,分别 为:
第四章 平面弯曲解析
14
4.2.2 剪力方程和弯矩方程 剪力图和弯矩图
(1)剪力方程和弯矩方程
剪力和弯矩沿着梁轴线分布的数学表达 式:
Q=Q(x) M=M(x)
(2)剪力方程和弯矩图
以x为横坐标,剪力Q为纵坐标→Q-x图。 以x为横坐标,弯矩M为纵坐标→M-x图。
15
[例4-1] 试作出如图所示简支梁的剪力图和弯矩图。
第4章 平面弯曲
平面弯曲计算 简单超静定梁的求解 压杆的稳定性简介
1
第
4.1 平面弯曲的概念和实例
4
4.2 平面弯曲的内力分析
章
4.3 平面弯曲的正应力计算
4.4 平面弯曲的变形计算
平
面 4.5 简单超静定梁的求解
弯 曲 4.6 压杆稳定性简介
目录
2
4.1 平面弯曲的概念和实例
(1)实例:
桥式起重机
A
y 2 dA
2 h
y2
bdy
b13
2
y
3
2
h
2
bh3 12
bh3
WZ
IZ ym ax
12
h
2
bh2
6
28
(2)圆形截面
D
Iz
y2dA
A
3 sin 2 dd
2
2
3d sin 2 d
D 4
0
0
64
(3)圆环形截面
Wz
Iz ymax
D4 64 D3
D 2 32
内径为d 外径为
2) 纵线(a-a,b-b)弯曲成曲线, 且梁的一侧伸长,另一侧缩 短。
纯弯曲梁的变形特点 图4-10 纯弯曲梁的变形特点
平面弯曲
•
有
EIz
1 M = M及 = ρ ρ EIz
式中,1/ρ表示中性层的曲率。反映梁产生弯曲变 形的程度;EIz表示梁抵抗弯曲变形的能力,称为 抗弯刚度。由式(4-44)可知,在指定截面上M为一 定值时,梁的抗弯刚度越大,曲率越小,梁的弯 曲变形也越小。 将 σ = E ⋅ ε = E y 代入得
ρ
My σ = Iz
式(4-45)是计算梁在纯弯曲时横截面上任意一点的 正应力公式。 式中,M——横截面上的弯矩; y——所求点到中性轴的距离; Iz——整个截面对中性轴的惯性矩。 正应力σ的正负号可根据变形判断,以中性轴为界 ,变形后凸边的纤维受拉,应力为正(拉 应力) ,凹边的纤维受压,应力为负(压应力)。
(2) 求梁的最大正应力值,及最大正应力值发生的 位置。该梁为等截面梁,在全梁范围内惯性矩为 一常数,任意截面的上下边缘至截面中性轴的距 离均相等。所以最大正应力发生在最大弯矩截面 的上下边缘处。 则最大正应力为
M max
ql 2 2 × 52 = = kN ⋅ m = 6.25kN ⋅ m 8 8 M max ymax M max h 6.25 × 106 × 200 = = = = 6.25N/mm 2 = 6.25MPa 8 IZ 2I Z 2 × 10
距中性轴y处的纵向纤维 a1a2的原长为,变形后 的长度,所以纤维的 伸长量为,相应的纵 向线应变为: ydφ y ε= = ρ dφ ρ 上式表明:各纤维的纵 向线应变与它到中性 层的距离成正比
距中性层最远的上、下 边缘处的线应变最大 ,而中性层上线应变 为零。
2. 物理方面 假设梁在纯弯曲时纵向 纤维之间无挤压作用 ,梁内各点处于单向 受力状态,材料在线 弹性范围内。则
工程力学习题库-弯曲变形

第8章 弯曲变形本章要点【概念】平面弯曲,剪力、弯矩符号规定,纯弯曲,中性轴,曲率,挠度,转角。
剪力、弯矩与荷载集度的关系;弯曲正应力的适用条件;提高梁的弯曲强度的措施;运用叠加法求弯曲变形的前提条件;截面上正应力分布规律、切应力分布规律。
【公式】 1. 弯曲正应力 变形几何关系:yερ=物理关系:Ey σρ=静力关系:0N AF dA σ==⎰,0y AM z dA σ==⎰,2zz AAEI EM y dA y dA σρρ===⎰⎰中性层曲率:1MEIρ=弯曲正应力应力:,My Iσ=,max max z M W σ=弯曲变形的正应力强度条件:[]maxmax zM W σσ=≤ 2. 弯曲切应力矩形截面梁弯曲切应力:bI S F y z z S ⋅⋅=*)(τ,A F bh F S S 2323max ==τ工字形梁弯曲切应力:dI S F y z z S ⋅⋅=*)(τ,A F dh F S S ==max τ圆形截面梁弯曲切应力:bI S F y z z S ⋅⋅=*)(τ,A F S 34max =τ弯曲切应力强度条件:[]ττ≤max3. 梁的弯曲变形梁的挠曲线近似微分方程:()''EIw M x =-梁的转角方程:1()dwM x dx C dx EIθ==-+⎰ 梁的挠度方程:12()Z M x w dx dx C x C EI ⎛⎫=-++ ⎪⎝⎭⎰⎰ 练习题一. 单选题1、 建立平面弯曲正应力公式zI My /=σ,需要考虑的关系有()。
查看答案A 、平衡关系,物理关系,变形几何关系B 、变形几何关系,物理关系,静力关系;C 、变形几何关系,平衡关系,静力关系D 、平衡关系, 物理关系,静力关系;2、 利用积分法求梁的变形,不需要用到下面那类条件()来确定积分常数。
查看答案A 、平衡条件B 、边界条件C 、连续性条件D 、光滑性条件3、 在图1悬臂梁的AC 段上,各个截面上的()。
《平面弯曲变形》课件

平面弯曲变形的应用实 例
桥梁和建筑结构的平面弯曲变形分析
桥梁结构:桥梁 的平面弯曲变形 分析,包括梁、 拱、索等结构
建筑结构:建筑结构 的平面弯曲变形分析, 包括框架、剪力墙、 筒体等结构
变形原因:荷载、 温度、湿度、地 震等外部因素引 起的变形
变形影响:对结构 安全性、稳定性、 耐久性的影响
变形控制:通过设 计、施工、维护等 手段控制变形,保 证结构安全
剪切应力的分布规律:剪切应力在剪切面上分布不均匀,靠近剪切面中心处应力较小, 远离剪切面中心处应力较大
剪切应力的影响因素:剪切力、剪切面形状、材料性质等
剪切应力的应用:在工程设计中,需要考虑剪切应力对结构的影响,以避免结构破坏 或失效。
平面弯曲变形的能量平 衡
弹性势能与动能之间的关系
弹性势能:物体在弹性形变过 程中储存的能量
感谢观看
汇报人:
平面弯曲变形可以分为弹性变形和塑性变形两种类型。
弹性变形是指物体在外力作用下,其形状和尺寸发生变化,但外力消失后,物体可以 恢复到原来的形状和尺寸。
塑性变形是指物体在外力作用下,其形状和尺寸发生变化,但外力消失后,物体不能 恢复到原来的形状和尺寸。
平面弯曲变形的分类
弯曲变形:物体在外力作用下发生弯曲变形 扭转变形:物体在外力作用下发生扭转变形 弯曲-扭转变形:物体在外力作用下同时发生弯曲和扭转变形 弯曲-弯曲变形:物体在外力作用下同时发生弯曲和弯曲变形
平面弯曲变形的稳定性 分析
稳定性分析的基本概念
稳定性分析的目的:确定结构在受力作用下的稳定性 稳定性分析的方法:有限元分析、能量法等 稳定性分析的指标:临界载荷、临界应力等 稳定性分析的应用:结构设计、优化等
稳定性分析的方法和步骤
第十一章 弯曲问题的进一步研究与组合变形

M z ,max Wz M y ,max Wy
19.3 103 5.18 103 6 402 10 48.3 106
155 106 Pa 155MPa
故此梁满足正应力强度条件
讨论:若F力的作用线与y轴重合,即=0,则梁的最大正应力为 M max 20 103 6 max 49.8 10 Pa 49.8MPa 远小于155MPa 6 Wz 402 10
对称轴
FA
问题:当梁不具有纵向对称平面,或梁虽具有纵向对称平面,但 外力的作用面与该纵向对称平面间有一夹角,则该梁发生什么变 形呢?
F
F F
z
C
F
C
z
C
z
y
y
y
斜弯曲
斜弯曲
平面弯曲与扭转
工程中的许多受力构件往往同时发生两种或两种以上的基本变形, e 称为组合变形。 F
Me
F
(轴向压缩 和弯曲) 偏心压缩
a
z
C
wz
wy b
y
z
z
C
a
F
w
y
F
y
F
讨论: (1)若梁的截面是正方形,由于Iy=Iz,所以b =,故梁不会 发生斜弯曲,而发生平面弯曲。正多边形也是如此。 (2)若梁的截面是圆形,由于Iy=Iz,所以b =,故梁不会发 生斜弯曲,而发生平面弯曲。
例11-2 外力F通过截面形心,且与y方向的 夹角=15°,材料许用应力[170MPa, 试校核此梁的强度。 解: 梁跨中截面上的弯矩最 2m 大,故为危险截面,该截面 上的弯矩值为 M Fl 1 20 4 20kN.m
例11-1 悬臂梁的横截面分别采用如图所示三种截面,在自由 端受集中力F作用,F力均通过这些截面的形心C。试指出这三 种截面梁各产生何种变形形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
将三个结点的位移和面积坐标代入上式,可
得:a1=wi , a2=wj, a3=wm。代入上式对Li ,Lj求导,注意Lm=1-Li-Lj,可得
L w i w iw ma4Lja5(L mL i)a6Lja7(L 2 j2LjL m ) a8(4L iL mL 2 i L 2 m )a9(L 2 j2L iLj)
Li Lj Lm及其一阶导数在三个结点为零, 对于确定待定参数 无用;考虑到用结点位移表示待定参数时计算方便,不考虑二
次和三次的前三项。因此,只能在剩下的6个三次项中选择三 个或利用某种线性组合。考虑对称性,假设位移模式为:
w=α1L1+α2L2+α3L3+α4L12L2+21L1L2L3+α5L22L1+21L1L2L3 +α6L22L3+21L1L2L3+α7L32L2+21L1L2L3 +α8L32L1+21L1L2L3 +α9L12L3+21L1L2L3
第十章 平板弯曲问题
主要内容:
薄板弯曲理论基本假设和基本方程 基于薄板理论的非协调板单元 基于薄板理论的协调板单元
1、薄板弯曲理论基本假设和基本方程
基本假设 ——Kirchhoff假设
(1)直法线假设:薄板中面法线变形后仍保持为法线 。由此,板中面内剪应变为零。
(2)忽略板中面的法线应力分量,且不计其引起的应 变。
薄板弯曲问题中的弹性矩阵[D]
[D]12(1E3t 2)1
1
0
1
10D0
1
0
0
1
0 0 2 0 0 2
D0
Et3
12(1
2)
➢内力矩表示薄板应力的公式
{}1t23z{M}
平衡方程
2M x2x2 2x M yx y 2M y2yq(x,y)0
由广义应力应变关系及几何关系代入平衡方程得 由W的微分方程:
对于三角形单元,面积坐标的一、二、三次齐次分
别有以下项:
一次项Li,: Lj,Lm
二次 L 2 i,L 2 j项 ,L 2 m ,L iL : j,L jL m ,L m L i
Li Lj Lm 1
Li
Ai A
三 L 3 i, 次 L 3 j,L 3 m ,L 2 iL j, 项 L 2 jL m ,L 2 m L i,L : iL 2 j,L jL 2 m ,L m L 2 i,L iL jL m
每个角结点有6个参数 w i, w x i, w y i, 2 x w 2 i, 2 y w 2 i, x 2 w y i,i 1 ,2 ,3
每个边中结点有1个参数
w n k
,k
4,5,6
共21个条件恰好可以确定21个待定系数
每个边界w是5次变化,两端节点分别有6个结点参数:
j,m)
Nji 12LiLj 12(LiL2j L2iLj)
利用:w,Li Lwi cj w x bj w y bjx cjy
w,Lj
w Lj
ci
w x bi
w y bix
ciy
bi yi ym, ci xmxi
(i, j,m)
将w,Lii和w,Lji变换成θxi、 θyi,从而得到相应于θxi、 θyi的形函数Nxi、 Nyi
L w j w jw ma4(L mL j)a5L ia6L ia7(L 2 jL 2 m4L jL m ) a8(2L iL mL 2 i)a9(2L iL jL 2 i)
将结点的面积坐标代入上述两式,可得6个关 于a4~a9的方程,求解后可得a4~a9:
a4
1 2
( w , Ljj w , Ljm
{}z{}
应力
x
{}y[Dp]{}z[Dp]{}
xy
[D0 ]
E
1
2
1
1
0
0
1
0 0 2
内力:板单位宽度
上弯矩Mx 、 My和 Mxy ,为应力分量 在板截面上的合力
矩:
Mx
t
[M]My Mxy
2 t
z{}dz
2
弹性矩阵
t
2 t
2
z2[Dp
]{}dz
t3 12[Dp
]{}
[D][]
{ai}
单元结点位移列阵
a1
{a}e
a
2
w
i xi
yi
w
i
(
w y
)
i
w ( x ) i
a
3
a 4
2、位移模式
矩形薄板单元有4个结点,12个结点位移分 量,1个挠度独立变量,根据选取位移函数的原 则,取:
w (x ,y ) a 1 a 2 x a 3 y a 4 x 2 a 5 x y a 6 y 2 a 7 x 3 a 8 x 2 y a 9 x2 y a 1y 0 3 a 1x 1 3 y a 1x 2 3y
),
a5
1 2
( w , Lii w , Lim
),
a6
1 2
( w , Lii w , Lij w , Lji w , Ljj
),
a7
w j
wm
1 2
( w , Ljj
w , Ljm
)
a8
wi
wm
1 2
( w , Lii w , Lim
)
w,Lij 表示w对Li的 偏导数在j点的值。
在常应变下,校正函数对项恒为零,对原来位移函数W0
的完备性没有干扰。且边界上的法向导数 w n 可以唯一
的确定。故单元是协调元。
3、多结点参数的协调元
多结点参数:结点参数中除w和 w n 外,还包含 w的二阶导数,甚至更高阶项。
Eg:图示的三角形板单元, 位移采用完全5次多项式,其 中包含21个待定系数,可以用 21个结点的条件决定。
wi
,
w s
i
,
2w s2
i
可唯一的确定边界上5次变化的w,
在边界上位移w是协调的
在每个边界 w
n
是4次变化,两端节点分别有4个结点
参数
w n
i
,
2w ns
i
还有边中结点
w n
共5个结点参数
w
可唯一确定边界上4次变化的 n
,在边界上 w
n
是协调的
故这种单元完全满足协调性要求
{P }eqa 1b ba1b a1ba1ba
3 3 3 3 33 3 3
非协调板单元可以通过分片试验,当单元划分不断缩 小时,计算结果可以收敛于精确解答,但是收敛并非 一定是单调的,即不一定是精确解的上界或下界。
2.2 薄板三角形单元
a 1 a 2 x a 3 y a 4 x 2 a 5 x a 6 y y 2 a 7 x 3 a 8 x 2 y a 9 x 2 a 1 y y 3 0
3、基于薄板理论的协调板单元
非协调板单元的收敛性是以分片试验为条件的即使收 敛也非单调,不能对解的上下界作出估计。
经典薄板理论范围内使板单元满足协调性 要求的方法:
1)增加结点参数 结点参数中包含w的二次导数 项
2)保持结点3个参数前提下采取其他措施,如附加 校正函数法、在分割法等。
1、3结点的协调元
1-3项刚体位移 4-5项常应变
单元间法线导数 可能不连续
非协调元
将结点坐标和结点位移代入上式,可解出 a1~a12,再代入该式并整理得位移函数
w[N]{a}e
式中形函数
[N ][N 1N 2N 3N 4] [N]i [Ni NxiNy]i
Ni
81(1i)(1i)(2i
i2
2
Nxi 81bi(1i)(1i)(12) Nyi 81ai(1i)(1i)(12)
问题:
1、为什么结点位移参数
要取
yi
w ?x i
2、在矩形单元中四结点12自由度薄板单元位移四次
项为什么选x3y和xy3,而没有选其它四次项?选用x4
和y4将导致什么结果?
3、四结点12自由度薄板单元挠度和转角协调,法向 转角不协调,所以称其为非协调元,如何来证明?
4、对于非协调的矩形单元除广义坐标法外还有什么 方法可更容易的确定插值函数?
(3)薄板中面内的各点没有平行于中面的位移,即中 面不 变形。
利用上述假设将平板弯曲问题转化为二维问题, 且全部应力和应变可以用板中面挠度w表示。
w w (x,y) uw z vw z
x
y
基本方程
(1)位移:由假设(1)、(3),有
(2)应变
w w (x,y) uw z vw z
x
y
由假设(1)、(2),薄板弯曲问题只需要考虑三
D 0( 4 xw 42x 2 4 w y2 4 yw 4)q(x,y)
边界条件
(1)位移边界条件
S1
w |s1 w
(2)混合边界条件
w n s1
S2
w |s2 w
Mn |s2 Mn
其中
(Qn
Mns S
(3)力边界条件
S 3 Mn |s3 Mn
) Vn
s3
Mn|s2D02nw2 2sw2
1、位移模式
三角形单元能较好地适应斜 边界,实际中广泛应用。单 元的结点位移仍然为结点处 的挠度wi和绕x,y轴的转角
θxi、θyi,独立变量为wi。
三角形单元位移模式应包含9个参数。若考虑完全 三次多项式,则有10个参数。若以此为基础构造位 移函数,则必须去掉一项。无法保证对称。经过许 多研究,问题最后在面积坐标下得以解决。
a9
wi
wj