伺服控制中电子齿轮比综述
一文看懂伺服电机电子齿轮比设置方法
一文看懂伺服电机电子齿轮比设置方法伺服电机是一种采用反馈控制技术的电机,能够精确地控制电机的位置、速度和力矩。
电子齿轮比则是伺服驱动器中的一个参数,用于调节电机的转速和输出力矩。
伺服电机的电子齿轮比设置方法如下:1.确定所需的电子齿轮比值。
电子齿轮比是指通过改变电机的驱动波形周期或频率来达到改变电机转速和输出力矩的目的。
一般情况下,电子齿轮比的取值范围为0.1至100之间,取值越大,电机的输出速度越慢,输出力矩越大。
2.进入伺服驱动器的参数设置界面。
不同型号的伺服驱动器具有不同的参数设置方式,一般通过控制面板、计算机软件或编程来进行设置。
根据具体的驱动器型号和操作方法,进入参数设置界面。
3. 找到电子齿轮比参数。
在参数设置界面中,找到电子齿轮比的参数,一般以“Gear Ratio”或“Gear Factor”等名称表示。
这个参数通常是一个浮点数,可以输入或选择合适的数值来设置电子齿轮比。
4.输入或选择电子齿轮比值。
根据实际需求,输入或选择合适的电子齿轮比值。
输入时,可以通过控制面板或键盘输入数值;选择时,可以通过菜单或旋钮等方式进行选择。
设置完成后,保存参数设置。
5.测试和调整电子齿轮比。
设置完成后,进行测试和调整。
通过观察和测量电机的转速和输出力矩,判断是否符合实际需求。
如果不符合,可以再次进行参数设置,调整电子齿轮比的数值,直至满足要求。
需要注意的是,不同的伺服驱动器可能有不同的参数设置名称和方式,以上只是一种常见的设置方法。
在实际操作中,应根据伺服驱动器的具体说明书和操作指南进行设置,以确保设置的准确性和安全性。
总之,伺服电机的电子齿轮比设置能够精确调整电机的转速和输出力矩,为实际应用提供更好的性能和控制效果。
通过以上步骤,可以一步一步地进行设置和调整,以满足不同的应用需求。
伺服驱动器的电子齿轮比的设置方法

伺服驱动器的电子齿轮比的设置方法上一节我们讲述了伺服电机编码器的分辨率与线数、位数的关系,今天我们说下伺服驱动器电子齿轮比的设置方法,电子齿轮比是干什么用的,我们通过使用伺服电机的电子齿轮,行程比例变更,可以设定每个脉冲的移动量。
下面我们通过位移量和旋转角度的电子齿轮比的设定来举例说明。
1位移量位移量通过电子带动丝杆或同步带的旋转量转换,如下图:伺服电机带丝杆为了提高输出转矩,在电机和丝杆机械部分还需要通过减速机或者齿轮大小来连接,常见的就是一些减速机(蜗轮蜗杆、行星式减速机)或者设置不同大小的齿轮通常是小轮带着大轮旋转实现减速。
以下图为例子,伺服电机编码器的分辨率是1000线通过4倍频就是4000p/r,减速机部分的减速比n=1/2,丝杆导程或者螺纹距Pb=10mm,现在要求将每个脉冲的移动量设定为10um也就是通常说的1丝。
机械丝杆那么电子齿轮比是如何计算的呢,首先我们看下在没有使用电子齿轮比情况下1个脉冲对应的移动量是1/8丝,没有达到我们的要求,因此需要放大量来提高使之到达1丝,这个放大量就是电子齿轮比数值就是相应提高8倍,也就是未使用电子齿轮比情况下移动量的倒数。
使用电子齿轮比8/1时,1个脉冲对应的位移量就是1丝。
电子齿轮比还有另外一种方法就是套公式:电子齿轮比计算公式其中,N、M是电子齿轮比的分子分母,△p是1个脉冲移动量,Pt是编码器分辨率,n是减速比,Pb是丝杠的导程(螺纹距)。
2角度量旋转台角度量就是类似上面的传导装置,旋转台一圈就是Pb等于360°,减速比或者同步带轮比n是8/64,伺服电机编码器分辨率是17位转换成脉冲量Pt就是131072p/r,现在要求将每个脉冲的旋转量设定△p 为0.01°。
和上面移动量分析一样,在没有使用电子齿轮比的时候,1个脉冲对应的旋转角度是1125/32768(0.01°),没有达到我们的要求,需要一个扩大倍数就是它的倒数32768/1125来扩大它后,也就是当设定电子齿轮比是32768/1125时,1个脉冲对用的角度就是0.01°。
伺服电机电子齿轮比的算法

伺服电机电子齿轮比的算法
1.齿轮比计算:
1.1确定速度要求:
通过分析系统要求,确定所需的速度范围和精度。
可以考虑最大速度、最小速度、加速度和减速度等。
1.2确定实际系统参数:
确定伺服电机的最大速度和最大加速度。
这些参数通常可以从电机的
技术规格中获得。
1.3计算电子齿轮比:
通过将速度要求和实际系统参数进行比较,可以计算出电子齿轮比。
一种常见的方法是使用比例关系,例如:
电子齿轮比=(速度要求/实际系统参数)*缩放系数
缩放系数是一个因素,用于根据具体应用的需求进行调整。
例如,如
果需要更高的精度,则可以降低缩放系数。
2.控制器实现:
2.1设计控制器:
根据具体的应用需求,选择适当的控制器类型,例如PID控制器。
根
据传感器反馈和电机输出的误差,调整控制器参数以实现所需的控制性能。
2.2实现控制算法:
将电子齿轮比应用到控制算法中,以实现所需的速度控制。
例如,如果输入速度是1000rpm,而电子齿轮比是2,则输出到伺服电机的速度应是2000rpm。
2.3评估和调整:
实施控制算法后,通过实际测试和分析系统响应,评估控制性能并进行必要的调整。
这可能涉及到调整电子齿轮比、控制器参数或其他系统参数。
以上是一个基本的伺服电机电子齿轮比算法的框架。
具体的实现细节会因应用的不同而有所差异。
为了实现更高的精度和性能,可能需要考虑更复杂的算法和控制器设计。
伺服驱动的工作原理之电子齿轮比计数举例

伺服驱动的工作原理之电子齿轮比计数举例1)已知条件如下:
伺服电机额定转速为:2000r/min
编码器每圈发出脉冲数为4096p/r
PLC控制器输出的最高脉冲频率为100KHZ
伺服电机输出轴连接减速机构,输入转速:输出转速=4:1
求:PLC控制器输出分辨率(即脉冲当量)为0.1度/每个脉冲的电子齿轮比。
机械结构如下图所示:
2)计算说明:
当电子齿轮比为1:1时,伺服电机经减速机驱动工作台的分辨率为(即当前机构PLC控制器发出一个脉冲时,转盘转动的角度):
(度/每个脉冲)
3)脉冲当量为0.1度/每个脉冲的电子齿轮比:
式中:A为电子齿轮比的分子=1024
B为电子齿轮比的分母=225
4)PLC控制器输出最高脉冲频率为100KHZ时,伺服电机的转速:
伺服电机的转速= ≈ 6667(r/min)>2000(r/min)额定转速
由于PLC输出100KHZ脉冲频率时,伺服电机的转速超过额定转速,所以PLC输出的
脉冲频率必须加以限制为:≈ 30KHZ
式中C为PLC输出的上限脉冲频率为30KHZ。
伺服电机电子齿轮比计算公式

伺服电机电子齿轮比计算公式
伺服电机电子齿轮比计算公式是用来计算伺服电机的电子齿轮比,也称为“系数”。
电子齿轮比也被称作“减速比”,是伺服电
机的重要参数,可以定义伺服电机传动系统的功率和运动性能。
电子齿轮比是一个重要的特性,它可以确定转子转速和输出轴转速之间的比例。
电子齿轮比计算公式可以表示为R = N1/N2,其中R表示伺服
电机的电子齿轮比,N1表示伺服电机的自转速度,N2表示伺
服电机的输出轴速度。
本公式可以用来计算比较简单的伺服电机的电子齿轮比,也可以用来计算复杂的伺服电机的电子齿轮比。
在实际的应用中,在计算伺服电机的电子齿轮比时,多以电流和转矩为准则,以电流作为参考参数,以转矩来衡量电机的输出能力及传动系统的效率。
要算出电子齿轮比,首先定义好电机要输出的转矩(T), 要求驱动轴转速(N2)和电机电压(V),然后根据关系T=KVnN2可以求出电机的自转速度
(N1),最后可以得出电子齿轮比 R = N1 / N2。
伺服电机的电子齿轮比的计算公式是由电流、功率和转速,三个参数之间的关系推导而来的,是对电机及其传动系统进行参数设计的重要工具。
它在伺服电机的设计中具有重要的意义,可以确定伺服电机的转矩、电流、起动等行为,为提高伺服电机的工作效率和性能作出重要贡献。
(完整word版)伺服电机的电子齿轮比怎么理解
电子齿轮设定本人经多次研究总结了一下经验:得出一种简单的电子齿轮设定方法,适用于初学者,高手请勿见笑!请大家支持原创,水平有限,不正之处请各位不吝指教!这种简单的电子齿轮设定方法为“将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母”如果再装减速器的话,PLC原来所发脉冲数再乘以减比。
以三菱MR-J2-S举个例子:伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。
)需要720个脉冲,电子齿轮就设为131072 / 720 化简分数后为8192 / 45 这样PLC每次发720个脉冲伺服马达转一圈如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5(720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
要使电机每个脉冲旋转0.01圈只要设定电机每100个脉冲旋转一圈就可以了,和齿轮变比没关系,如果伺服驱动器没有直接设定多少脉冲一圈这个参数(三菱j3系列有),那么就用电机编码器分辨/100就是电子齿轮(实际设定不能设定这么大的电子齿轮比)。
一般要求设定电子齿轮比是设定一个整数脉冲对应整数距离方便设定的,还有就是由于模块输出脉冲达不到电机运行最高速度而设定。
例如:螺距8毫米,大齿轮为70,小齿轮为56,电机在小齿轮上,电机编码器分辨为2000脉冲/转,要求设定为每个脉冲为0.01毫米,求电子齿轮?2000/(8*56/70/0.01)=2000/640伺服电机的电子齿轮比怎么理解就是将PLC送来的脉冲数乘以“电子齿轮比”,用所得的结果与编码器的反馈脉冲数进行比较产生控制行为。
例如电子齿轮比=2,则PLC送来1个脉冲,电机就会转动一个对应编码器2个反馈脉冲数的角度简单理解就是:输入一个脉冲X 电子齿轮比= 你需要移动的距离,每一款的伺服驱动器都有一点差异,你可以使用厂家的选型软件,可以自动计算伺服驱动器,伺服电机的功率等参数伺服不带减速比,传动周长为100mm ,伺服编码器分辨率为2500 ,驱动器是松下A4系列。
伺服控制中电子齿轮比
伺服控制中电子齿轮比是什么伺服系统的精度由编码器的线数决定,而通过电子齿轮设定可以使指令脉冲设为任意值.怎么理解??答:伺服系统的精度是编码启的线数决定,这个不假,但这个仅仅是伺服电机的精度在实际运用中,连接不同的机械结构,如滚珠丝杠,蜗轮蜗杆副,螺距、齿数等参数不同,移动最小单位量所需的电机转动量是不同的电子齿轮比是匹配电机脉冲数与机械最小移动量的举个例子:车床用10mm丝杠,那么电机转一圈机械移动10mm,每移动0.001mm就需要电机旋转1/10000圈而如果连接5mm丝杠,且直径编程的话,每0.001的移动量就需要1/5000转这个是电子齿轮的作用。
电子齿轮设置的是驱动给电机的,编码器精度是电机反馈给驱动的。
假如电子齿轮比设为3,上位控制器发出100个脉冲,经过伺服驱动器后实际发给伺服电机的脉冲数应该为100*3=300个脉冲。
同样,上位控制器发出的脉冲速度和脉冲加速度都要乘以这个比例电子齿轮功能是指可将相当于指令控制器输入指令1脉冲的工件移动量设定为任意值的功能,分为电子齿轮(分子)Pn 202、电子齿轮(分母)Pn 203两部分参数。
在无减速比条件下设定时,根据当前电机的编码器规格把相对应的编码器脉冲数13位:2048P/R 16位:16384P/R 17位:32768P/R乘以分频比4后,写入Pn 202。
将负载轴旋转一圈的脉冲数写入Pn 203。
例如:电机的编码器规格为16位时,把16384*4=65535写入电子齿轮(分子)Pn 202想要36000个脉冲转一圈的话,在电子齿轮(分母)Pn 203中写入36000 注:Pn 202/ Pn 203的值必须在[0.01,100],并且当Pn 202或Pn 203内的值超过65535后,请进行约分。
电子齿轮就电机编码器反馈脉冲与指令脉冲的一个比值简单实用地介绍伺服电子齿轮比的计算方法电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。
电子齿轮比
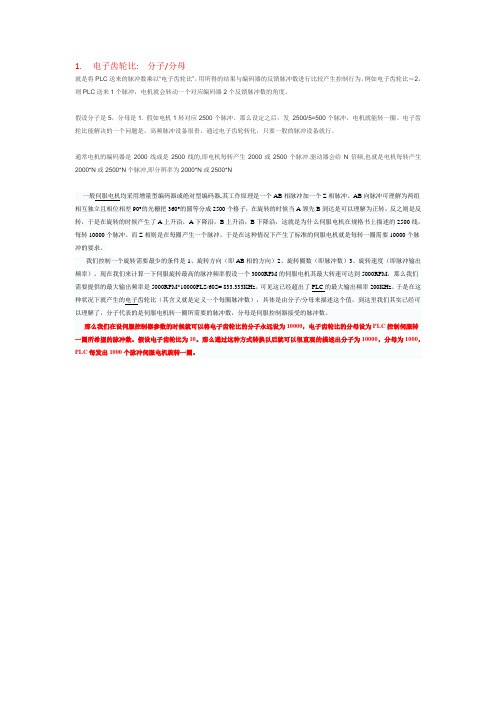
1.电子齿轮比: 分子/分母就是将PLC送来的脉冲数乘以“电子齿轮比”,用所得的结果与编码器的反馈脉冲数进行比较产生控制行为。
例如电子齿轮比=2,则PLC送来1个脉冲,电机就会转动一个对应编码器2个反馈脉冲数的角度。
假设分子是5,分母是1. 假如电机1转对应2500个脉冲。
那么设定之后,发2500/5=500个脉冲,电机就能转一圈。
电子齿轮比能解决的一个问题是,高频脉冲设备很贵,通过电子齿轮转化,只要一般的脉冲设备就行。
通常电机的编码器是2000线或是2500线的,即电机每转产生2000或2500个脉冲.驱动器会给N倍频,也就是电机每转产生2000*N或2500*N个脉冲,即分辨率为2000*N或2500*N一般伺服电机均采用增量型编码器或绝对型编码器,其工作原理是一个AB相脉冲加一个Z相脉冲。
AB向脉冲可理解为两组相互独立且相位相差90°的光栅把360°的圆等分成2500个格子,在旋转的时候当A领先B到达是可以理解为正转,反之则是反转,于是在旋转的时候产生了A上升沿,A下降沿,B上升沿,B下降沿,这就是为什么伺服电机在规格书上描述的2500线,每转10000个脉冲。
而Z相则是在每圈产生一个脉冲。
于是在这种情况下产生了标准的伺服电机就是每转一圈需要10000个脉冲的要求。
我们控制一个旋转需要最少的条件是1、旋转方向(即AB相的方向)2、旋转圈数(即脉冲数)3、旋转速度(即脉冲输出频率)。
现在我们来计算一下伺服旋转最高的脉冲频率假设一个3000RPM的伺服电机其最大转速可达到5000RPM,那么我们需要提供的最大输出频率是5000RPM*10000PLS/60S= 833.333KHz,可见这已经超出了PLC的最大输出频率200KHz。
于是在这种状况下就产生的电子齿轮比(其含义就是定义一个每圈脉冲数),具体是由分子/分母来描述这个值,到这里我们其实已经可以理解了,分子代表的是伺服电机转一圈所需要的脉冲数,分母是伺服控制器接受的脉冲数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服控制中电子齿轮比是什么伺服系统的精度由编码器的线数决定,而通过电子齿轮设定可以使指令脉冲设为任意值.怎么理解??答:伺服系统的精度是编码启的线数决定,这个不假,但这个仅仅是伺服电机的精度在实际运用中,连接不同的机械结构,如滚珠丝杠,蜗轮蜗杆副,螺距、齿数等参数不同,移动最小单位量所需的电机转动量是不同的电子齿轮比是匹配电机脉冲数与机械最小移动量的举个例子:车床用10mm丝杠,那么电机转一圈机械移动10mm,每移动0.001mm就需要电机旋转1/10000圈而如果连接5mm丝杠,且直径编程的话,每0.001的移动量就需要1/5000转这个是电子齿轮的作用。
电子齿轮设置的是驱动给电机的,编码器精度是电机反馈给驱动的。
假如电子齿轮比设为3,上位控制器发出100个脉冲,经过伺服驱动器后实际发给伺服电机的脉冲数应该为100*3=300个脉冲。
同样,上位控制器发出的脉冲速度和脉冲加速度都要乘以这个比例电子齿轮功能是指可将相当于指令控制器输入指令1脉冲的工件移动量设定为任意值的功能,分为电子齿轮(分子)Pn 202、电子齿轮(分母)Pn 203两部分参数。
在无减速比条件下设定时,根据当前电机的编码器规格把相对应的编码器脉冲数13位:2048P/R 16位:16384P/R 17位:32768P/R乘以分频比4后,写入Pn 202。
将负载轴旋转一圈的脉冲数写入Pn 203。
例如:电机的编码器规格为16位时,把16384*4=65535写入电子齿轮(分子)Pn 202想要36000个脉冲转一圈的话,在电子齿轮(分母)Pn 203中写入36000 注:Pn 202/ Pn 203的值必须在[0.01,100],并且当Pn 202或Pn 203内的值超过65535后,请进行约分。
电子齿轮就电机编码器反馈脉冲与指令脉冲的一个比值简单实用地介绍伺服电子齿轮比的计算方法电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。
例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少?来源于:528工控网计算如下图所示:根据上图中的算法,可以算出电子齿轮比CMX/CDV的值来源于:528工控网例子2:已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?来源于:528工控网△Lo=(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?电子齿轮比=(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc=解答:(1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo= 8mm/131072(2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少?△Lo×电子齿轮比×1000=0.1(3) 电机的额定速度为3000rpm,脉冲频率应为多少?Fc×电子齿轮比=3000/60×131072介绍电子齿轮比的概念及如何应用先看一下机械齿轮比的概念:两个直径不同的齿轮结合在一起转动,直径大的齿轮转速自然会比直径小的齿轮转慢一些,它们的转速比例其实和齿轮直径大小成反比,这个比例成为齿轮比.电子齿轮比的的作用同样也是用于转速比例调节,用很小的脉冲频率调节出很大的转速!以松下A4系列伺服电机为例,伺服电机旋转一周,伺服驱动器需要给伺服电机10000个脉冲,同时编码器反馈10000个脉冲给伺服放大器。
如果令伺服电机以20转/秒的速度旋转,控制器需要每秒发200000个脉冲,即是200K,如果我们用三菱FX1N来控制伺服电机,FX1N最高只能发送100K的脉冲。
这时就需要引入电子齿轮比以减小PLC发给伺服放大器发脉冲的频率。
伺服电机实际脉冲频率=PLC发给伺服驱动器的脉冲频率X电子齿轮比需要注意的是,电子齿轮比设的很大,每个脉冲对应的位移也很大,精度调整也就越困难!在设定电子齿轮比时要综合考虑速度与精度的矛盾!要使电机每个脉冲旋转0.01圈只要设定电机每100个脉冲旋转一圈就可以了,和齿轮变比没关系,如果伺服驱动器没有直接设定多少脉冲一圈这个参数(三菱j3系列有),那么就用电机编码器分辨/100就是电子齿轮(实际设定不能设定这么大的电子齿轮比)。
一般要求设定电子齿轮比是设定一个整数脉冲对应整数距离方便设定的,还有就是由于模块输出脉冲达不到电机运行最高速度而设定。
例如:螺距8毫米,大齿轮为70,小齿轮为56,电机在小齿轮上,电机编码器分辨为2000脉冲/转,要求设定为每个脉冲为0.01毫米,求电子齿轮?2000/(8*56/70/0.01)=2000/640每分行程:15*1000=15000mm电机转速:15000/10=1500转/分你说的100HZ如果是脉冲频率,那你可以算出脉冲周期F=1/T T=0.01 就是0.01S发一个脉冲根据周期和你电机一圈脉冲量就能算出你电机的转速,伺服电机在喷绘机上应用计算公式送布电机和小车板电机喷绘机中的电机从功能上分为3类:墨泵电机,送布电机和小车板电机,届于墨泵电机功率小,本文不做重点介绍,只对送布电机和小车板电机的选型应用做详细讲解。
目前喷绘机的送布电机和小车板电机从电机类型上分为步进电机和伺服电机,伺服电机又分为直流有刷电机和交流无刷电机。
步进电机在低速时扭矩大,但步进电机的机构决定了步进电机无法支持600RPM以上的速度,另外,由于步进电机在停机时定位时的缺陷会造成走位误差,已经无法满足现在喷绘机高速高效的要求。
由于伺服电机响应快,速度高,并且定位精度高的特点,现在喷绘机普遍选用这一类电机作为送布电机和小车板控制电机。
届于成本的压力,目前在中低速喷绘机上的主流电机为低压直流伺服电机,配套的控制器分别有模拟伺服驱动器和全数字伺服驱动器。
模拟伺服驱动器以深圳雷赛科技的DB810A为代表,全数字伺服驱动器厂商国内主要由上海哲佑P系列和深圳雷赛的DCS810系列为代表。
由于模拟电路在使用中的漂移性,从而使得模拟伺服驱动器不太适合高速定位的应用。
本文着重讲解P系列全数字伺服控制器在喷绘机上的应用举例。
送布系统要求:要求能够正反转,进布和退布速度保持平稳,在停机时自动锁死,防止布滑落。
设计:采用PH100DC伺服驱动器+PM100DC伺服电机,最大输出功率100W,编码器线数为1 000PPR,定位精度为正负1个脉冲,锁死电流为6A,响应频率为20KHZ,在24V额定电压下最高速度为2500RPM,额定扭矩0.29Nm。
测试结果:同上位机控制卡保持同步性能较好,走布误差在2个脉冲之内。
小车板控制系统要求:高速响应,最高速达到1.2米/秒,机械减速比为1:6 ,采用PH10 0DC伺服驱动器+PM100DC伺服电机,定位精度为正负1脉冲,在24V额定电压下最高速度为2500RPM,额定扭矩0.29Nm,轴径8mm。
下面将通过举例介绍如何通过喷头选择电机和驱动器设计1:根据喷头点火频率计算喷头打印速度;如:Xaar 128/40喷头,点火频率是8.3KHz,打印分辨率为360dpi时:喷头打印速度===0.585m/s因此,此喷头的打印速度为0.585m/s。
设计2:喷头电机齿轮直径15mm,变速皮带轮:大轮直径68mm,小轮42mm:(以1200mm/s 的打印速度为例)电机转速计算:电机轴周长:C =πD = 3.14×15 = 47.1mm1200mm/s时,电机转速:n =综合:当喷头打印速度为1200mm/s时,电机最高转速为2475RPM。
因此额定转速为2500RP M的PM100DC可以满足1.2米/秒的高速要求。
由设计1和设计2:喷头速度为0.585m/s时电机最高转速为:n =设计3:喷头重量为5kg,喷头打印速度1.2m/s,电机加速时间0.3s,小车匀速摩擦力2 0N,机械效率80%,减速比6,喷头小车加速时的力:F = m +f = 5kg×4m/ +20N=40N加速所需扭矩:TL = = 40N×0.034m=1.36Nm电机输出扭矩:T= 0.18Nm综上所述:当喷印速度为1.2m/s时,电机所需最大扭矩为0.18Nm,所需转速为2475RPM,PH100DC电机在恒定额定电压下输出扭矩0.29Nm,转速2500RPM,能够满足高速要求。
测试结果:电机从0加速至2475RPM时间为0.3s,小车板在移动过程中稳定无振动,小车板静止时保持力度足够大。
系统测试结论:对于喷头轴和进布轴伺服性能的要求主要是伺服系统有较高的动态响应及较高的定位精度。
全数字直流伺服驱动器基于专用运动控制器DSP 和高效MOSFET等先进技术的硬件平台,有着高速度频率响应,具有共振抑制功能,可以精确调谐,消除震动;控制精度可以达到1个脉冲,最大的输入频率可以达到250Kpps,这都很好的保证了进布轴所需驱动的要求。
对于主轴伺服要求有快速的启停特性和稳定的速度控制,全数字直流伺服驱动器是基于DSP的硬件控制,具有开放式的参数调整接口,可以根据用户的使用情况进行参数的设置。
这些特点是步进电机系统和模拟伺服系统所不能比拟的。
伺服电机原理一、交流伺服电动机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。
当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。