三维模型特征提取算法
三维点云数据中的形状特征提取

三维点云数据中的形状特征提取一、三维点云数据概述三维点云数据是现实世界中物体表面或空间的点的集合,每个点包含其在三维空间中的坐标信息。
这种数据形式广泛应用于计算机视觉、机器人学、地理信息系统等领域。
三维点云数据的获取通常通过激光扫描、结构光扫描、立体视觉等技术实现。
点云数据的特点是能够精确地反映物体的几何形状和空间位置,但同时也伴随着大量的数据点,这给数据处理和分析带来了挑战。
1.1 三维点云数据的获取三维点云数据的获取方法多样,包括但不限于以下几种:- 激光扫描:通过发射激光束并接收其反射回来的光,计算光束飞行时间或相位差来确定物体表面点的三维坐标。
- 结构光扫描:投射特定的光条纹或光点阵列到物体表面,通过摄像头捕捉到的图像与已知的光模式进行匹配,计算出物体表面的三维坐标。
- 立体视觉:利用两个或多个摄像头从不同角度观察同一物体,通过三角测量法计算出物体表面的三维坐标。
1.2 三维点云数据的特点三维点云数据具有以下特点:- 高密度:能够提供物体表面的高密度采样,精确反映物体的细节。
- 无序性:点云数据中的点是无序排列的,没有固定的组织结构。
- 大数据量:由于高密度采样,点云数据通常包含大量的点,数据量庞大。
- 多维度:除了三维坐标信息,点云数据还可以包含颜色、强度、法线等多维度信息。
二、形状特征提取的重要性形状特征提取是从三维点云数据中识别和提取出能够代表物体形状的关键信息。
这些特征对于物体识别、分类、建模等任务至关重要。
有效的形状特征提取能够减少数据处理的复杂性,提高算法的效率和准确性。
2.1 形状特征提取的应用场景形状特征提取在多个领域有着广泛的应用,包括:- 物体识别:通过比较物体的形状特征来识别和分类不同的物体。
- 机器人导航:提取环境中的障碍物形状特征,帮助机器人进行路径规划。
- 医学影像分析:从医学扫描数据中提取形状特征,辅助疾病诊断和手术规划。
- 文物保护:提取文物的形状特征,用于文物的数字化存档和修复。
基于三维点云模型的特征线提取算法
刘
北京 1 0 0 8 7 5 )
倩 , 耿 国华 , 周 明 全 ,赵 璐 璐 , 李 姬 俊 男
( 1 .西北 大学 信 息科 学与技 术 学院 计 算机 系, 西安 7 1 0 1 2 7 ; 2 .北京 师 范大 学 信 息科 学与技 术 学院计 算机 系 ,
摘
要 :针对 以往 算法存 在无 法 区分 尖锐 和 非尖锐 特征 点 、 提取 的特 征 点与视 角有 关、 特征 点 未连 线等 问题 , 提
出一种基 于高斯 映射 和 曲率值 分析 的 三维 点云模 型尖 锐特 征 线提 取 算 法 。该 算法 先进 行 点 云数 据 点 的 离散 高
斯 映射 , 并将 映射 点 集聚类 ; 然后使 用 自适应 迭代过 程得 到 两 个或 多个面 的相 交线 上 曲率 值 和 法 向量发 生 突变
三维模型检索相关的特征提取和语义研究
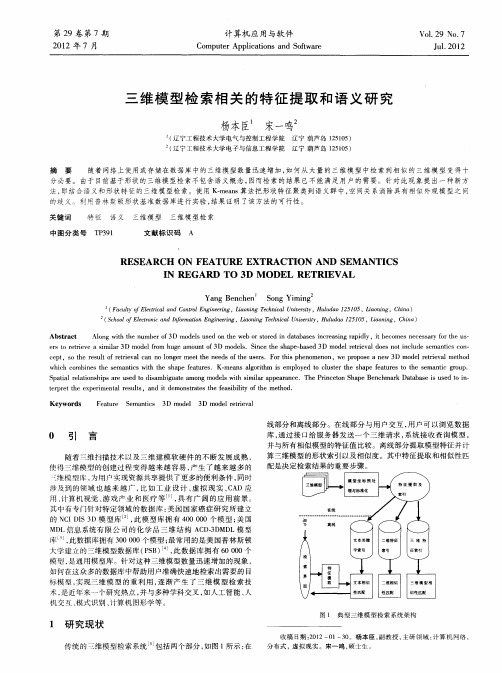
线部分和离线部分。在线部分 与用 户交互 , 用户 可 以浏览 数据
0 引 言
随 着 i维 扫 描 技 术 以 及 三 维 建 模 软 硬 件 的 不 断 发 展 成 熟 ,
Mn l 距 DXy=∑ a an 离:(, ht a )
l≤ i n 1≤ , n ≤ ≤
2 1 形状 以及相 似性计算 方 法 .
2 11 形 状 . .
形状是 三维模 型最重要的特性 , 与颜色 、 纹理相 比能够更细
致地描述模 型。而且形状是无量纲的 , 任何旋转 , 平移都不改变 其特性。从整个三维模 型的特征 中计算 形状模 型 , 提供 全局信
息如面积 、 体积 、 周长 、 半径等 。既不需 要初始分 割步骤也 不需
连通分量上的点归为一类 , 最终得 到原顶点 集 的一 个分类集
合, 即商集 。将商集 中的点根据原有 模型点 间的邻接 关系连接 起来 , 就得 到原有模 型的一个骨架 。骨架 图法 即首先计算 出 J 模型的骨架节点 , 然后通过各节点构造 出相应的骨架 图, 通过 中 轴线更简洁地再现三维几何 的形状及 拓扑变化 , 是一个有 向 这
库, 通过 接 口给服 务器发送一 个三维请求 , 系统接 收查询模 型 , 并与所有相似模型的特征值 比较 。离线部分提取模型特征并计 算三维模型的形 状索引以及相似度。其 中特征提取和相似性匹 配是决定检索结果的重要步骤。
使得 三维模 型的创建过程 变得 越来越 容易 , 产生 了越来越 多的 j 模 型库 , 维 为用 户 实现 资源 共 享 提 供 了更 多 的便 利 条 件 , 时 同 涉及到的领域 也 越 来越 广 , 比如工 业 设计 、 虚拟 现 实 、 A C D应 用、 计算机视觉 、 游戏 产业 和医疗 等… , 具有 广阔 的应用 前景 。 其 中有专 门针对特定领域 的数据库 : 国国家癌症 研究所建 立 美 的 N I I3 C S D模 型库 , D 此模 型库拥 有 4 00 0个模 型 ; 国 0 0 美 MD L信息系统有 限 公 司的化 学 品三 维结 构 A D3 MD C 一D L模 型 库 J此 数 据 库 拥 有 3 000个 模 型 ; 常 用 的 是 美 国普 林 斯 顿 , 0 0 最 大学建立的三维模型数据库 ( S ) , 数据库拥 有 6 0 PB 此 000个 模型 , 是通用模 型库 。针对这种三维模 型数量迅速增加 的现象 ,
三维模型检索中的特征提取方法
三维模型楦索 巾的特征 提取方法
海南 大学信 息科 学技 术 学院 潘 萍
[ 摘 要] 三维模 型检 索的关键 问题是如何 有效地提取 三维模型 的特 征。本文在 查阅 了国内外大量有关三 维模 型检 索文献的基础 上, 对三维模型的特征提 取方法进 行 了研 究, 总结了当前存在的特征提取算法 , 并对其进行 了分析与比较 。 [ 关键词] 三维模型 检 索 特征提取
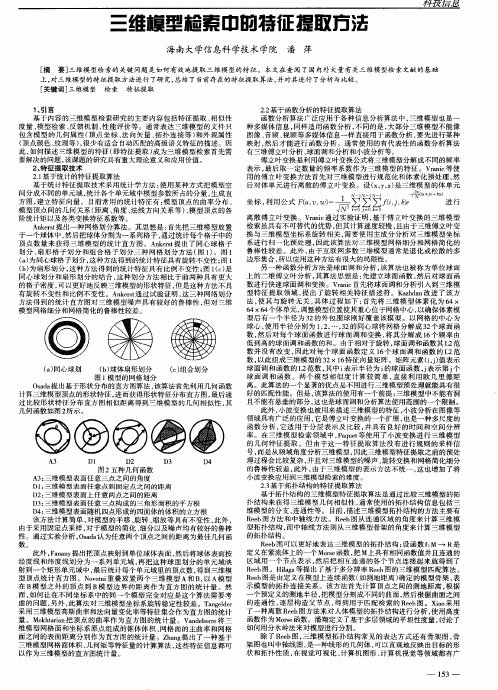
系进行归一化 预处理 , 因此 该算法对三维模 型网格细分和 网格简化 的 鲁 棒性较差 。此 外 , 由于互 联网多数三维模 型通常是退化或 松散 的多 边形 集合 , 以应用这种方法有很大 的局限性。 所 另一种 函数分析 方法是球 面调和分析 , 算法也被称 为单位球面 该 上 的二维傅立 叶分析 , 其算 法思想是 : 先建立球 面函数 , 然后 对球面 函 数 进行快速球面调和变换 。V ai首先将球面调和分 析引入到三维模 r c n 型特征 提取领 域 , 出了旋转 相关特 征描述 符。K zdn改进 了该方 提 ah a 法 , 其与 旋转无 关 , 使 具体 过程如 下 : 先将 三维模 型体 素化为 6 首 4X 4 6 6 × 个体单元 , 整模 型位置使其重心位于 网格 中心 , 4 调 以确保体素模 型后有一 个半径 为 3 2的外包 围球刚好覆 盖该模型 。以网格 的中心为 球心, 使用半 径分别为 1 2 … ,2 同心球将 网格分解成 3 个球面 函 ,, 3的 2 数, 然后对 每个球 面函数进行 球面调 和变换 , 将其分 解成 1 个 频率 由 6 低 到高的球面调和 函数 的和。 由于相对于旋转 , 球面调 和函数 其 L 范 2 数并没有 改变 , 因此对 每个球 面函数定 义 1 个球 面调和 函数 的 L 范 6 2 数, 以此组成三维模 型的 3 ×1 特征向量矩阵 。矩阵元素 (, 值表示 2 6 ij ) 球 面调和 函数的 L 范数 , 中 i 2 其 表示半 径为 i 的球面 函数 ,表示 第 j j 个 球 面调 和 函数 。两个 模型 相似 度计算 较简 单 , 直接利 用欧 几里 德距 离。此算法的一个显著的优点是不用进行三维模型预处理就能具有很 好 的匹配性能。但是 , 该算法的使用有一个前提 : 三维模型 中不能有洞 且 不能有悬垂 的部分 , 这也是球面调 和分析算法使用范围的一个限制。 此外 , 小波变换也被用来描述三维模型的特征 , 小波分析在 图像等 领 域具有广泛的应用 , 它是傅立叶变换的一个扩展 , 也是一种多尺度 的 函数分 析 , 它适 用于分 层表示及 比较 , 具有 良好的 时间和空 间分辨 并 率 。在三 维模型检索 领域 中 ,au t P qe等使 用 了小波 变换进行 三维模型 的几何 特征提取 。但 由于这一 特征提取 算法没 有进行规 则 的采样信 号, 而是从频域角度分析三维模型 , 因此三维模型特征提取之前 的预处 理 过程会 比较复杂 , 并且对三维模型的噪声 、 旋转变换和 网格简化细分 的鲁棒性较差 , 此外 , 由于三维模型 的表示 方法 不统一 , 也增加 了将 这 小 波变换应用 到三维模 型检索 的难度 。
一种三维模型特征提取与压缩算法
成 都 大 学 学 报( 自然 科 学 版) Junl f hnd nvriyNtr l cec dto) ora egu iest ( ua Sine iin oC U a E
V_129 o . N O. 3 Se p. 201 0
对 于三维模 型检 索 , 征 提取 是 整 个 检 索 系 统 特 最 主要 和关键 的 问题 . 常 , 特征 提取 有两 个基 本 通 对 要求 : 一个 是提 取 的特征 要足够 区分 各个 三 维模 型 ,
要 实 现三维 模 型 的检索 ,首先 要把模 型进 行参 数化处 理 ,而参 数化 的三维模 型必 然要用 到很 多变 量参数 来表 示 .变量 太多 ,会增加 分析 问题 的难 度 与复杂 性 ,增加 计算 的工 作量 ,从 而使检 索 的速度
文章编号:0 4— 4 2 2 1 )3— 2 5一 4 10 5 2 (0 0 0 0 4 o
一
种 三 维 模 型 特 征 提 取 与压 缩 算 法
刘 作 军
( 阴工 学院 计 算机 工程 学院 , 苏 淮安 淮 江 230 ) 203
摘
要: 特征提取是三 维模型检 索最主要 的问题 , 提取 的特征决定检 索系统 的性 能和效率 , 如何对提取 的特征
量所 反 映 的信 息 .这样 做 既节省 存储 和后续计 算索的性 能 .本 文采 用 主元分 析 方法实 现该 功能 ,主元 分析
是 把 原来多 个变 量转 化 为少数 几个综 合指 标 的一种 统计 分 析 方 法 ,从 数 学 角 度 看 是 一 种 降 维 处 理 技
术.
征提取和压缩算法 , 该算法能同时确保三维模型检 索的性能和速度 .
三维人脸特征提取方法
SW:总类内离散度矩阵
2、当采用主成分分析方法提取人脸特征时, 人脸图像的局部特征往往反映了人脸的内 在特性,对分类具有重要作用,但是主成 分分析是对人脸图像特性的一种整体统计 方法,图像中的像素占有了同等的地位, 对于人脸特征如嘴巴,鼻子,眼睛等特征 没有强调其重要性。 3、PCA方法是一种离线计算方法,训练库 中添加新的训练样本,要重新计算特征向 量,花费时间长。
两大优点
1、消除了模式样本的相关性 2、实现了样本的以所有样本的最优重 建为目的,并没有利用样本之间的类别信 息,因此就分类角度而言,PCA提取的特征 不一定对分类有益。(fisher线性判别是以 样本的最优可分为目标的监督子空间方法)
W0
1 Sw (m1 m2 ) 1 Sw (m1 m2 )
思路:寻找正交矩阵A使得A对x的变换得到 的y的协方差矩阵Cy为对角矩阵
设x为n维的粗特征 y为m维的经加工后的特征 则线性变换的关系为:y=Ax
K-L变换
由λ的N阶多项式|λI-Cx|=0,求矩阵Cx的特征值 λ0, λ1, …, λN-1 求矩阵Cx的N个特征向量A0, A1, …, AN-1 (CxAi=λi Ai, i=0, 1, …, N-1) 将A0, A1, …, AN-1归一化,即令<Ai, Ai>=1, i=0,1,… N-1 由归一化的向量A0, A1, …, AN-1构成正交矩阵A, 即A=[A0, A1, …, AN-1]T 由y=Ax实现对信号x的K-L变换,此时y的协方 差矩阵Cy为对角阵
主成分分析法
c00 c01 c c11 10 Cx E x x x x T cN 10 cN 11 c0 N 1 c1N 1 cN 1N 1
三维模型检索中若干特征提取方法的研究与应用
Abstract
With the development of 3D model acquisition, modeling methods, and hardware technology, 3D models are more and more widely used in many areas. Not only increasing number of 3D models are produced, did the quantity and scale of 3D model databases. Since constructing a new 3D model is a time-expending task as well as a energy-consuming job, it becomes more and more important to reuse the existing 3D models. In order to fully make use of the existing model resources, and find the models that one needs accurately and efficiently, the research on building the 3D model search engine is an urgent issue. A complete 3D model retrieval system typically includes feature extraction, similarity matching, index structure, and query interface. Among them, feature extraction is the most important for the 3D model retrieval. Hence 3D model feature extraction is the key technology in 3D model retrieval, and it is also the focus of this paper. The main job of this paper is to research and implement the technology of 3D model feature extraction, the innovation is that it proposes and implements three new methods of feature extraction: 1. The first method proposed in this paper is a 3D model geometric shape matching based on 2D projective point sets. It is different from the method of Min which compared the 3D shapes based on 2D contour map, also different from the means of Loffer which used the technology of of 2D image retrieval. This method compares the 3D shapes by measuring the statistical characteristic of 2D projective point sets, and it has low complexity. It is the first innovation of this paper. 2. Make use of multi-feature weighted distance to match the 3D models. Combine two characteristics, which is: the boundary feature of 2D projective point sets the former method had extracted, and the vertex density of triangle mesh of 3D models. The technology of the multi-feature weighted distance combining 2D boundary feature with 3D vertex density is the second innovation of this paper. 3. Introduce the curvature of discrete points into the 3D models matching. Extract the boundary conture of 2D projective point sets, compute the feature which is the product of the two: the curvature of discrete points on the boundary conture, and the distance between these points and
SolidWorks建模特征的自动提取与优化技术
SolidWorks建模特征的自动提取与优化技术SolidWorks是一种强大的计算机辅助设计(CAD)软件,广泛应用于机械工程和制造业。
在设计产品或零件时,SolidWorks的建模特征起着关键作用。
建模特征是定义对象形状的基本构建单元,如孔、凸台、切削特性等。
但是,在大型复杂模型中,手动提取和优化建模特征可能非常耗时且容易出错。
因此,开发一种自动提取与优化建模特征的技术对于提高设计效率和准确性至关重要。
自动提取建模特征是指通过分析已有几何形状和边界条件,从中自动识别并提取关键的建模特征。
这种技术可以大大节省时间和精力,特别是在复杂模型中。
SolidWorks在自动提取方面提供了一些功能,例如自动识别孔和凸台等基本特征,但在处理更复杂的特征时仍存在一些限制。
为了进一步优化自动提取建模特征的准确性和效率,可以采用以下方法:首先,利用参数化建模技术。
通过将设计参数化,可以创建可重复使用的模型,从而简化模型的构建和修改。
参数化建模技术可以减少手动操作,提高建模的一致性。
在自动提取建模特征时,参数化建模技术可以准确地识别并提取不同形状和尺寸的特征。
其次,采用几何分析和形状识别算法。
几何分析可以通过对模型进行三维形状的测量和分析,自动提取出具有代表性的特征。
通过将测量的几何特征与现有的形状数据库进行比较,并应用形状识别算法,可以有效地识别出建模特征。
形状识别算法可以通过对一系列形状特征进行匹配和比对,找到最佳的匹配结果。
另外,应用机器学习和人工智能技术。
机器学习和人工智能技术可以通过训练模型来分析和理解建模特征的模式和属性,并自动提取和优化建模特征。
通过对大量数据进行学习和模式识别,机器学习和人工智能技术可以更准确地提取和优化建模特征。
此外,采用反馈机制和迭代优化算法,可以不断改进自动提取和优化建模特征的准确性和效率。
在优化建模特征方面,可以考虑以下几个方面:首先,考虑设计目标和约束条件。
在提取和优化建模特征时,应该将设计目标和约束条件纳入考虑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维模型特征提取算法一、特征提取需求由来虚拟装配在CAD 建模领域使用广泛,Solidworks 、Pro/E、UG 等都有自己的零件装配程序模块,但是它们相互之间并不能进行直接的数据格式转换。
比如:Solidworks 创建一个简单的零件直接用Pro/E 打开会丢失很多模型拓扑信息。
STL 文件格式是通用的固体三维模型表示文件,常用CAD 软件都能打开。
STL 文件是一种简单数据格式,其中只记录了模型的顶点和法向量(数据格式下一节具体介绍),大多数CAD 软件支持STL 文件格式的零件输出。
然而,无论何种CAD 软件打开STL 文件之后,都难以读取模型的特征信息,甚至连模型的一个表面都选不中。
在这种情况下,如果我们想把一大堆的STL 格式模型,加载到某款CAD 软件中进行装配,可能性几乎为零。
在这种情况下,出现了对提取模型拓扑信息的需求。
下面将详细介绍这种方法,并给出在OSG 场景中提取一个齿轮面的例子,供大家二、基本概念三角形是三维引擎的基本绘制图元。
任意一个三角形包括三个顶点和一个法向量(三个顶点和一个法向量确定了一个最小单位的表面),无论是什么样子的三维模型都可以分解成三角形的组合。
一个三维模型上的三角形并非独立存在,它们是有相互关系的,这些关系主要体现在两方面:(1)邻接关系(共边、共顶点)。
(2)归一化法向量之间的夹角关系(法向量相等、法向量共面等等)。
通过上述关系可以把三角形归类,从而组成不同的曲面。
下面以平面和柱面为例对三角形组成的曲面进行介绍。
定义一:模型中任意两个三角形存在公共边,则称两个三角形紧邻。
定义二:模型中任意两个三角形存在公共顶点,则称两个三角形邻接。
定义三:如果存在一组三角形它们具有邻接关系(紧邻、邻接)并且归一化法向量全等则这一组三角形在同一个平面上。
定义四:如果存在一组三角形它们具有邻接关系(紧邻、邻接)并且归一化法向量处于某个平面上则这组三角形处在同一个柱面上。
定义五:归一化法向量,满足公式:关于其他形状的定义大家可以自己总结(如球面、圆柱面、圆锥面等等),这里只给出平面和一般柱面(多面体、圆锥面、圆柱面都是柱面)的定义。
下面给出一个平面获取的例子:粉红色区域为三角形组成的平面15 边形,法向量平行(归一化法向量相等)。
在图形中可以看到,在模型的所有三角形中可以确定这样一组三角形,它们共同组成了粉红色区域,即在粉红色区域上取任意三角形作为起始,搜索模型中所有三角形能够确定一组与起始三角形归一化法向量相等且相邻。
三、特征提取算法介绍为了简洁起见,在此只讨论“曲面提取”算法,关于拉伸凸台等算法大家可以自己去推算,其实有了表面提取算法其他特征的提取也并不复杂。
下面详细介绍这个算法。
算法定义:在模型的所有三角形中搜索满足邻接条件的、法向量满足特定数学方程的三角形集合。
(本定义只能满足归一化法向量)1、类定义如下:(1)定义一个三角形或多边形的边Edge {Vertext* v1;//边的第一个顶点Vertext* v2;//边的第二个顶点Triangle *owned_triangle; // 所属的三角形}(2)定义一个三角形Triangle{Vertex *v1;//三角形的第一个顶点Vertex *v2;//三角形的第二个顶点Vertex *v3;//三角形的第三个顶点Edgee1;//三角形的第一条边Edgee2;//三角形的第二条边Edgee3;//三角形的第三条边Normal *normal;//三角形的法向量Surface *owned_surface; // 所属的曲面(3)定义一个表面Surface {Vector<Triangle*> tri_buf;//一个表面包含的三角形集合Vector<Edge*> edge_buf;//一个表面包含的边(包含三角形的边//不一定是表面的边)}(4)Vector<Triangle> all_triangle_buf; //存储模型包含的所有三角形。
2、表面搜索算法表面搜索算法大致可以分为两个步骤:第一步,在模型包含的所有三角形中搜索符合相同数学方程的三角形。
第二步,判断搜索到的三角形是否有邻接关系,如果有添加到要搜索的表面,如果没有则抛弃。
Surface* buildSurface(Triangle*pSeed,Vector<Triangle>*all_triangle){Surface *surface = new Surface(); surface->addTriangle(pSeed);std::vector<Triangle*> buf;/* 查找所有符合法线相等条件的三角形*/for (unsigned int i=0; i< all_triangle.size(); i++){Triangle* tri = all_triangle) ;//判断两个向量是否满足特定方程,这一步尤为重要//isCo nsiste nt()方法可以重载多个以便分别求解平面、//柱面、球面等数学定义。
if (isConsistent (pSeed->getNormal(),tri->getNormal())&& tri->getOwnedSurface() == NULL){ buf.push_back(tri);}}//在符合法线相等的三角形中查找和平面邻接的三角形//找到的三角片虽然都符合同一个数学方程算法,但是//它们未必处在同一个曲面上(如两个曲面平行),所以//要进一步判定它们的邻接关系。
Triangle *tri = getAdjacencyTriangle(surface,&buf);for(;tri != NULL;){surface->addTriangle(tri); // 如果是邻接三角形则添加到曲面上surface->rebuild();//添加完三角形后需要重新构建平面//以便确定曲面的边tri = getAdjacencyTriangle(surface,&buf);// 本方法确定曲面的边和所有//符合特定数学方程三角形的//邻接关系。
}return surface;}四、STL 文件的表示格式本节将详细介绍STL 文件的格式。
以便于大家分析。
大家可以编制文件读取程序直接将STL 文件中Outer loop 关键字包含的顶点信息和Facet normal 关键字包含的法向量信息创建成第三节中介绍的Triangle 类。
然后,将Triangle 和法向量信息放到osg::Geometry 类中进而显示在osg::Viewer 中。
简洁起见,读取程序不再讨论。
1、介绍STL 是固体界面描述语言( Stereolithography Interface Language )的缩写,是一种快速成型标准。
任意表面的图元是三角形,三角形的法向量遵循逆时针轮廓方向2、关键字SolidFacetNormalOuterLoopVertexEndloopEndfacetEndsolid3、语法Solid [part name]Facet normal value value value Outer loopVertex value value value Vertex value value valueVertex value value valueEndloopEndfacetEndsolid [part name]4、正方体样例solidfacet normal 0.000000 1.000000 0.000000outer loopvertex 1.000000 1.000000 1.000000vertex 1.000000 1.000000 -1.000000vertex -1.000000 1.000000 -1.000000 endloopendfacetfacet normal 0.000000 1.000000 0.000000outer loopvertex -1.000000 1.000000 -1.000000 vertex -1.000000 1.000000 1.000000 endloop endfacetfacet normal 0.000000 0.000000 1.000000 outer loopvertex 1.000000 1.000000 1.000000 vertex -1.000000 1.000000 1.000000 vertex -1.000000 -1.000000 1.000000 endloopendfacetfacet normal 0.000000 0.000000 1.000000 outer loopvertex 1.000000 1.000000 1.000000vertex 1.000000 -1.000000 1.000000 endloopendfacet facet normal 1.000000 0.000000 0.000000outer loopvertex 1.000000 1.000000 1.000000vertex 1.000000 -1.000000 1.000000 vertex 1.000000 -1.000000 -1.000000 endloop endfacet facet normal 1.000000 0.000000 0.000000outer loopvertex 1.000000 1.000000 1.000000 vertex 1.000000 -1.000000 -1.000000 endloop endfacetfacet normal 0.000000 0.000000 -1.000000 outer loopvertex -1.000000 -1.000000 -1.000000 vertex 1.000000 1.000000 -1.000000vertex 1.000000 -1.000000 -1.000000 endloopendfacetfacet normal 0.000000 -1.000000 0.000000 outer loopvertex -1.000000 -1.000000 -1.000000 vertex 1.000000 -1.000000 -1.000000 vertex 1.000000 -1.000000 1.000000endfacet facet normal 0.000000 -1.000000 0.000000outer loopvertex -1.000000 -1.000000 -1.000000vertex 1.000000 -1.000000 1.000000 vertex -1.000000 -1.000000 1.000000 endloopendfacet facet normal -1.000000 0.000000 0.000000outer loopvertex -1.000000 -1.000000 -1.000000vertex -1.000000 -1.000000 1.000000 vertex -1.000000 1.000000 1.000000 endloop facet normal -1.000000 0.000000 0.000000 outer loopvertex -1.000000 -1.000000 -1.000000 vertex -1.000000 1.000000 1.000000 vertex -1.000000 1.000000 -1.000000 endloopendfacet facet normal 0.000000 0.000000 -1.000000 outer loopvertex -1.000000 -1.000000 -1.000000 vertex -1.000000 1.000000 -1.000000 vertex 1.000000 1.000000 -1.000000 endloopendfacet五、使用OSGConv对STL文件转换后的OSG文件格式在文件格式中我们只保留的顶点和法线向量定义部分,可以发现定点数正好是法线向量数的三倍( VertexArray Vec3Array 840 ,NormalArray Vec3Array 280 ),三个顶点(一个三角形)对应一个法线向量。