微机原理与接口技术第八章课后答案
1632位微机原理汇编语言及接口技术第八章课后习题答案

习题8.4中断请求寄存器IRR保存8条外界中断请求信号IR0~IR7的请求状态Di位为1表示IRi引脚有中断请求;为0表示无请求中断服务寄存器ISR保存正在被8259A服务着的中断状态Di位为1表示IRi中断正在服务中;为0表示没有被服务中断屏蔽寄存器IMR保存对中断请求信号IR的屏蔽状态Di位为1表示IRi中断被屏蔽(禁止);为0表示允许习题8.6某时刻8259A的IRR内容是08H,说明IR3引脚有中断请求。
某时刻8259A 的ISR内容是08H,说明IR3正在被中断服务,其它不被处理。
在两片8259A级连的中断电路中,主片的第5级IR5作为从片的中断请求输入,则初始化主、从片时,ICW3的控制字分别是 20H 和 05H 。
习题8.9普通全嵌套方式:8259A的中断优先权顺序固定不变,从高到低依次为IR0、IR1、IR2、……IR7;中断请求后,8259A对当前请求中断中优先权最高的中断IRi予以响应,将其向量号送上数据总线;在ISR的Di位置位期间,禁止再发生同级和低级优先权的中断,但允许高级优先权中断的嵌套。
普通中断结束方式:配合全嵌套优先权方式使用;CPU用输出指令往8259A发出普通中断结束EOI命令;8259A就会复位正在服务的中断中优先权最高的ISR位。
习题8.13int08h proc far ;远过程sti ;开中断,允许中断嵌套push ds ;现场保护push axpush dx…… ;日时钟计时…… ;控制软驱马达int 1ch ;调用指令中断1CHmov al,20h ;发送EOI命令(00100000B,D4D3=00,说明是OCW2)out 20h,alpop ax ;现场恢复pop dxpop dsiret ;中断返回。
微机原理与接口技术课后习题答案
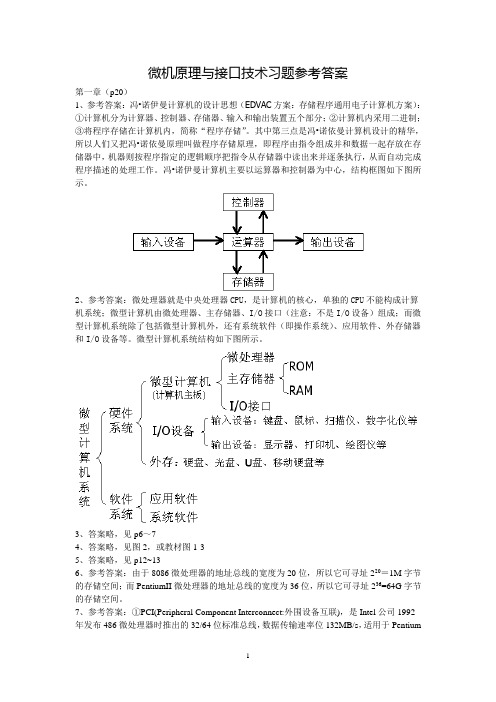
微机原理与接口技术习题参考答案第一章(p20)1、参考答案:冯•诺伊曼计算机的设计思想(EDVAC方案:存储程序通用电子计算机方案):①计算机分为计算器、控制器、存储器、输入和输出装置五个部分;②计算机内采用二进制;③将程序存储在计算机内,简称“程序存储”。
其中第三点是冯•诺依曼计算机设计的精华,所以人们又把冯•诺依曼原理叫做程序存储原理,即程序由指令组成并和数据一起存放在存储器中,机器则按程序指定的逻辑顺序把指令从存储器中读出来并逐条执行,从而自动完成程序描述的处理工作。
冯•诺伊曼计算机主要以运算器和控制器为中心,结构框图如下图所示。
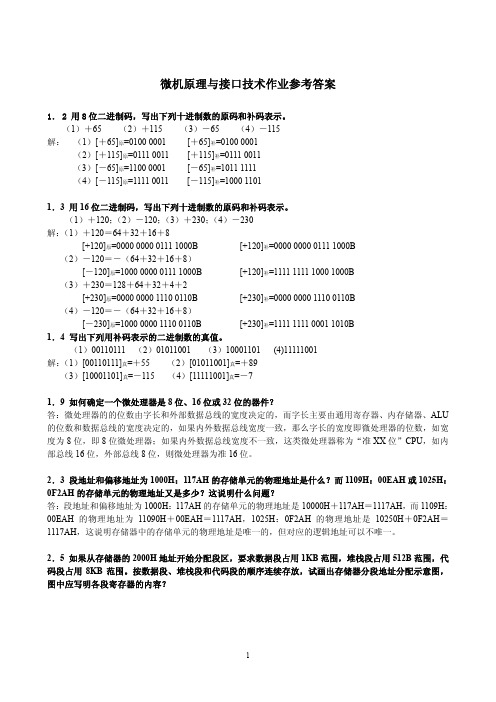
2、参考答案:微处理器就是中央处理器CPU,是计算机的核心,单独的CPU不能构成计算机系统;微型计算机由微处理器、主存储器、I/O接口(注意:不是I/O设备)组成;而微型计算机系统除了包括微型计算机外,还有系统软件(即操作系统)、应用软件、外存储器和I/O设备等。
微型计算机系统结构如下图所示。
3、答案略,见p6~74、答案略,见图2,或教材图1-35、答案略,见p12~136、参考答案:由于8086微处理器的地址总线的宽度为20位,所以它可寻址220=1M字节的存储空间;而PentiumII微处理器的地址总线的宽度为36位,所以它可寻址236=64G字节的存储空间。
7、参考答案:①PCI(Peripheral Component Interconnect:外围设备互联),是Intel公司1992年发布486微处理器时推出的32/64位标准总线,数据传输速率位132MB/s,适用于Pentium微型计算机。
PCI总线是同步且独立于微处理器的具有即插即用(PNP:Plug and play,所谓即插即用,是指当板卡插入系统时,系统会自动对板卡所需资源进行分配,如基地址、中断号等,并自动寻找相应的驱动程序)的特性.PCI总线允许任何微处理器通过桥接口连接到PCI 总线上。
微机原理第一章至第八章作业参考答案
1KB 512B
8KB
1KB=210 的偏移地址范围为: 00 0000 0000~11 1111 1111 即 000H~3FFH 512B=29 的偏移地址范围为: 0 0000 0000~1 1111 1111 即 000H~1FFH 8KB=213 的偏移地址范围为: 0 0000 0000 0000~1 1111 1111 1111 即 0000H~1FFFH
POP AX
PUSH CX
2.10 下列程序段中每一条指令执行完后,AX 中的十六进制内容是什么?
MOV AX,0
;0000H
DEC AX
;0000H-1=0FFFFH
ADD AX,7FFFH
;0FFFFH+7FFFH=7FFEH
ADD AX,2
;7FFEH+2=8000H
NOT AX
;NOT 8000H=7FFFH
目标:寄存器寻址
(5)TEST ES:[SI],DX
目标:寄存器间接寻址 源:寄存器寻址
(6)SBB SI,[BP]
目标:寄存器寻址
源:寄存器间接寻址
2.8 假定 DS=2000H,ES=2100H,SS=1500H,SI=00A0H,BX=0100H,BP=0010H,数据段中变
量名 VAL 的偏移地址值为 0050H,试指出下面源操作数字段的寻址方式是什么?其物理地址值是多少?
每条指令执行后 AX 的内容为:
0000H
0FFFFH 7FFEH
8000H
7FFFH
8000H
0000H
0BFDFH 0ABCDH 0CDABH 9B56H
36ADH
2.15 假定 DX=00B9H,CL=3,CF=1,确定下列各条指令单独执行后 DX 中的值。
微机原理与接口技术课后习题答案(马善农主编)

微机原理与接口技术课后习题部分解答习题一1.1将下列十进制整数转换为二进制数和十六进制数:(1)456=1C8H=111001000B (2)1000=3E8H=1111101000B(3)32767=7FFFH=111111*********B (4)40000=9C40H=1001110001000000B1.2将下列二进制数转换为十进制数和十六进制数:(1)10011B=19=13H (2)10111101B=189=BDH(3)11111111B=255=FFH (4)101010101010B=2730=AAAH1.3将下列十进制小数转换为二进制数(精确到小数点后4位):(1)0.5=0.1B(2)0.75=0.11B(3)0.625=0.101B(4)0.626=0.1010B1.4将下列十六进制数转换为十进制数和二进制数:(1)FAH=250=11111010B (2)FFFH=4095=111111111111B(3)FFFFH=65535=1111111111111111B (4)A5A5H=42405=1010010110100101B 1.5假设计算机的字长是8位,写出下列二进制数的原码、反码和补码:(1)1011=(00001011)原码=(00001011)反码=(00001011)补码(2)-1011=(10001011)原码=(11110100)反码=(11110101)补码(3)-1111=(10001111)原码=(11110000)反码=(11110001)补码(4)10111=(00010111)原码=(00010111)反码=(00010111)补码1.6下列各个数均为十进制数,请用8位二进制补码计算下列各题:(1)67-45 =(67)补码+(-45)补码=01000011B+11010011B=00010110B=22(2)85-(-15)=(85)补码+(15)补码=1010101B+1111B=1100100B=100(3)-76-37 =(-76)补码+(-37)补码=10110100B+11011011B=10001111B=-133(4)45-33=(45)补码+(-33)补码=101101B+11011111B=00001100B=12习题二2.1 简述8086 CPU 基本结构组成与功能。
微机原理与接口技术课后习题答案(详细完全版).
第一章1.1 解:五代,详细见书1.2 解:微型计算机:以大规模、超大规模集成电路为主要部件,以集成了计算机主要部件——控制器和运算器的微处理器为核心,所构造出的计算机系统 。
PC机:PC(Personal Computer)机就是面向个人单独使用的一类微机 。
单片机:用于控制的微处理器芯片,内部除CPU外还集成了计算机的其他一些主要部件,如:ROM、RAM、定时器、并行接口、串行接口,有的芯片还集成了A/D、D/A转换电路等。
数字信号处理器DSP:主要面向大流量数字信号的实时处理,在宿主系统中充当数据处理中心,在网络通信、多媒体应用等领域正得到越来越多的应用1.3 解:微机主要有存储器、I/O设备和I/O接口、CPU、系统总线、操作系统和应用软件组成,各部分功能如下:CPU:统一协调和控制系统中的各个部件系统总线:传送信息存储器:存放程序和数据I/O设备:实现微机的输入输出功能I/O接口:I/O设备与CPU的桥梁操作系统:管理系统所有的软硬件资源1.4 解:系统总线:传递信息的一组公用导线,CPU通过它们与存储器和I/O设备进行信息交换 。
好处:组态灵活、扩展方便三组信号线:数据总线、地址总线和控制总线 。
其使用特点是:在某一时刻,只能由一个总线主控设备来控制系统总线,只能有一个发送者向总线发送信号;但可以有多个设备从总线上同时获得信号。
1.5解:(1)用于数值计算、数据处理及信息管理方向。
采用通用微机,要求有较快的工作速度、较高的运算精度、较大的内存容量和较完备的输入输出设备,为用户提供方便友好的操作界面和简便快捷的维护、扩充手段。
(2)用于过程控制及嵌人应用方向。
采用控制类微机,要求能抵抗各种干扰、适应现场的恶劣环境、确保长时间稳定地工作,要求其实时性要好、强调其体积要小、便携式应用强调其省电。
1.6 解:11.7 解:I/O通道:位于CPU和设备控制器之间,其目的是承担一些原来由CPU处理的I/O任务,从而把CPU从繁杂的I/O任务中解脱出来。
微机原理、汇编与接口技术习题答案 第8章习题答案

微机原理、汇编与接口技术第八章习题答案8.1端口地址为380H~383H 4个A端口基本输入、B端口基本输出的方式控制字为90H,方式控制字寄存器的端口地址为383H。
初始化程序段如下:MOV AL, 90HMOV DX, 383HOUT DX, AL8.2MOV DX, 383HMOV AL, 80H ;3个端口基本输出的方式控制字80HOUT DX, ALMOV AL, 0EH ;PC7置“0”的置位/复位字0EHOUT DX, ALMOV AL, 9 ;PC4置“1”的置位/复位字09HOUT DX, AL8.3stack segment stack 'stack'dw 32 dup(0)stack endsdata segmentBUF DB 0data endscode segmentstart pro farassume ss: stack, cs: code, ds: datapush dssub ax,axpush axMOV ES,AX ;ES为中断向量表的段地址 0000Hmov ax,datamov ds,axMOV DX,383H ;A端口方式1输入MOV AL,0B0HOUT DX,ALMOV AL,9 ;PC4置1,允许A端口中断OUT DX,ALMOV AX,SEG IS8255 ;填写中断向量表MOV ES:01C6H,AXMOV AX,OFFSET IS8255MOV ES:1C4H,AXMOV DX,380H ;A端口的端口地址送DXIN AL,0A1H ;修改中断屏蔽字,允许IQR9中断IND AL,0FDHOUT 0A1H,ALJMP $IN AL,0A1H ;恢复中断屏蔽字,禁止IRQ9中断OR AL,02HOUT 0A1H,ALretIS8255: IN AL,DX ;读键值MOV BUF,AL ;存键值MOV AL,61H ;指定EOI命令OUT 0A0H,ALMOV AL,62HOUT 20H,ALPOP AX ;修改返址INC AXINC AXPUSH AXIRETstart endpcode endsend start8.4控制程序的框图stack segment stack 'stack'dw 32 dup(0)stack endsdata segmentBUF DB 00H, 10H, 10H, 10H ;SEGPT表中位移量为10H处的显示代码为全灭SEGPT DB 40H, 79H, 24H, 30H, 19H, 12H, 2,78HDB 0, 18H, 8, 3, 46H, 21H, 6, 0EH, 7FHKYTBL DB 17H, 27H, 2BH,2DH, 47H, 4BH, 4DH, 87H, 8BHDB 8DH, 8EH, 4EH, 2EH, 1EH, 1DH, 1BHdata endscode segmentstart proc farassume ss: stack, cs: cods, ds: datapush dssub ax, axpush axmov ax, datamov ds, axMOV DX, 383HMOV AL, 81H ;A口基本I/O出、PC H出、PC L入MOV DX, ALMOV DI, 0 ;存键入数的指针DISUP: MOV AH, 88H ;位选值, 从PC H输出, 1位为0, 3位为1 MOV BX, 0DISUP1: MOV CL, BUF [BX] ;取一个显示数XOR AL, ALMOV CH, AL ;将显示数扩展为16位MOV DX, 382HOUT DX, AL ;关显示,七段显示器的共阴极为高电平MOV SI, OFFSET SEGPT ;七段显示代码表的偏移首地址ADD SI, CX ;求得显示数的显示代码的偏移地址MOV AL, [SI] ;取显示代码MOV DX, 380H ;输出显示代码到A口OUT DX, ALMOV AL, AHMOV DX, 382H ;输出显示数位到C口(PC H)OUT DX, ALCALL D1MS ;1ms延时CMP AH, 11H ;是最低数位吗?JE DECKY ;是,转键盘扫描和键译码程序INC BX ;否,指向下一位数的存储地址ROR AH, 1 ;移到下一个数位JMP DISUP1DECKY: MOV AL, 7FHMOV DX, 380HOUT DX, AL ;关显示,七段显示器的七段均为低电平MOV AL, 0F0HMOV DX, 382HOUT DX, AL ;输出,使所有行线为低电平IN AL, DX ;读入键盘列数据AND AL, 0FH ;屏蔽无用位(D7~D4)CMP AL, 0FH ;有键按下吗?JE DISUP ;无键按下,返回显示程序CALL D20MS ;有键按下延时20ms,消除键抖动MOV CX, 4 ;行计数器MOV AH, 10HDECKY1: MOV AL, AHOUT DX, AL ;设置选择的行为低电平IN AL, DX ;输入列数据AND AL, 0F0H ;屏蔽无用位CMP AL, 0F0H ;该行有键按下吗?JNE DECKY2 ;有,转键译码SHL AH, 1 ;无,扫描下一行LOOP DECKY1 ;所有行扫描完成了?否,扫描下一行JMP DISUP ;是,转显示DECKY2: OR AL, AH ;行和列数值合并为键码MOV BX, 0DECKY3: CMP AL, KYTBL [BX] ;查键码表,找到按键吗?JE DECKY4 ;找到按键转DECKY4INC BX ;没找到JMP DECKY3 ;循环查找DECKY4: MOV BUF [DI], BL ;存按键INC DICMP DI, 4 ;存满4位键入数吗?JNE DECKY5 ;未存满,不修改指针MOV DI, 0 ;已存4位,修改指针DECKY5: IN AL, DX ;检测键释放AND AL, 0FHCMP AL, 0FHJNE DECKY5 ;直到键释放CALL D20MS ;消去键释放时的抖动等待20msJMP DISUPretstart endpD1MS PROC ;延时1ms子程序┇RETD1MS ENDPD20MS PROC ;延时20ms子程序┇RETD20MS ENDPcode endsend start8.5stack segment stack 'stack'dw 32 dup(0)stack endscode segmentstart proc farassume ss: stack, cs: codspush dssub ax, axpush axmov ax, datamov ds, axMOV DX, 383HMOV AL, 90H ;A口方式0入,B口和C口方式0出OUT DX, ALMOV DX, 380HIN AL, DX ;从A口读入原码AND AL, AL ;判原码的符号JNS DN ;为正去DNAND AL, 7FH ;为负,取其绝对值MOV DX, 382HOUT DX, AL ;绝对值从C口输出NEG AL ;将负数的绝对值求补DEC DXOUT DX, AL ;负数的补码从B口输出RETDN: INC DX ;正数直接从B口和C口输出OUT DX, ALINC DXOUT DX, ALretstart endpcode endsend start8.68.7设端口地址为380H~383H。
微机原理与接口技术课后习题答案(马善农主编)
微机原理与接口技术课后习题部分解答习题一1.1将下列十进制整数转换为二进制数和十六进制数:(1)456=1C8H=111001000B (2)1000=3E8H=1111101000B(3)32767=7FFFH=111111*********B (4)40000=9C40H=1001110001000000B1.2将下列二进制数转换为十进制数和十六进制数:(1)10011B=19=13H (2)10111101B=189=BDH(3)11111111B=255=FFH (4)101010101010B=2730=AAAH1.3将下列十进制小数转换为二进制数(精确到小数点后4位):(1)0.5=0.1B(2)0.75=0.11B(3)0.625=0.101B(4)0.626=0.1010B1.4将下列十六进制数转换为十进制数和二进制数:(1)FAH=250=11111010B (2)FFFH=4095=111111111111B(3)FFFFH=65535=1111111111111111B (4)A5A5H=42405=1010010110100101B 1.5假设计算机的字长是8位,写出下列二进制数的原码、反码和补码:(1)1011=(00001011)原码=(00001011)反码=(00001011)补码(2)-1011=(10001011)原码=(11110100)反码=(11110101)补码(3)-1111=(10001111)原码=(11110000)反码=(11110001)补码(4)10111=(00010111)原码=(00010111)反码=(00010111)补码1.6下列各个数均为十进制数,请用8位二进制补码计算下列各题:(1)67-45 =(67)补码+(-45)补码=01000011B+11010011B=00010110B=22(2)85-(-15)=(85)补码+(15)补码=1010101B+1111B=1100100B=100(3)-76-37 =(-76)补码+(-37)补码=10110100B+11011011B=10001111B=-133(4)45-33=(45)补码+(-33)补码=101101B+11011111B=00001100B=12习题二2.1 简述8086 CPU 基本结构组成与功能。
微机原理与接口技术课后习题答案

2-2 段寄存器 CS = 1200H,指令指针寄存器 IP = FF00H,此时指令的物理地址为多少? 指向这一物理地址的 CS 值和 IP 值是惟一的吗?
【解】 指令的物理地址 = 12000H + FF00H = 2lF00H
物理地址是 CPU 存取存储器所用的地址。逻辑地址是段和偏移形式的地址,即汇编语言程序中使用的存储器地址。物理地址可以对应于不同的逻辑地址,指向这一物理地址的 CS 值和 IP 值不是惟一的
端口A可工作于方式0,方式1,方式2;端口B可工作于方式0,方式1;端口C只可工作于方式0。
8-19 串行通讯与并行通讯的主要区别是什么?各有什么特点?
串行通信是在单条1位宽的导线上将二进制数的各位一位一位地按顺序分时传送。用于通信的线路少,因而在远距离通信时可以极大地降低成本,串行通信适合于远距离数据传送,也常用于速度要求不高的近距离数据传送。
第四章
4.4 4.7
第五章
5.4(什么是存储器访问的局部性?研究和讨论这一现象有什么意义?) 5.6(存储器体系为什么采用分级结构?主要用于解决存储器中存在的哪些问题?)没有整理答案啊......!
第六章
6.1(cpu与外设之间数据传输控制方式有哪几种?何为程序控制?他有哪两种基本方式?) 6.4(什么是接口?什么是端口?在8086|8088微机系统中,cpu如何实现端口寻址的?)
(5)MOV CX,LENGTH TABLEB ;(CX)=1]
7-1 什么是中断?简述一个中断的全过程。
解:所谓中断,是指在CPU执行程序的过程中,由于某些紧急事件发生,向CPU 提出申请,CPU停止当前正在执行的程序,转去执行处理紧急事件的程序,待处理完紧急事件后,再返回接着执行刚才被停止执行的原程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第八章作业参考答案
D和D/A转换器在计算机应用系统中起什么作用
答:在计算机应用系统中使用A/D转换器能把外部的模拟信号转换成数字信号输入计算机;使用D/A转换器能把计算机输出的数字信号转换成模拟信号,控制外部的执行机构。
2.A/D、D/A转换器的分辨率和精度有什么区别
答:分辨率是指转换器变化1位数字量时,对应模拟量的变化值。
精度分绝对精度与相对精度,指某种条件下的理论值与实际值的差异。
3. 设DAC0832端口地址为PORTDA,编写程序要求输出周期性的方波、锯齿波和三角波。
方波的参考程序:MOV DX, PORTDA
AA: MOV AL, 0FFH
OUT DX, AL
CALL DELAY
MOV AL, 00H
OUT DX, AL
CALL DELAY
JMP AA
锯齿波的参考程序:MOV DX, PORTDA
MOV AL, 00H
AA: OUT DX, AL
INC AL
JMP AA
三角波的参考程序:MOV DX, PORTDA
MOV AL, 00H
UP: OUT DX, AL
INC AL
JNZ UP
MOV AL, 0FEH
DOWN:OUT DX, AL
DEC AL
JNZ DOWN
JMP UP
4.设260H端口接了一片8位D/A,满量程输出为-5V~+5V,运行了下列程序后,将输出何种波形输出幅度是多少频率约为多少(注:D1MS是一个延时1ms的子程序)
MOV DX,260H
MOV AL,AL,00H
LOP1:OUT DX,AL
CALL D1MS
INC AL
JNZ LOP1
DEC AL
LOP2:DEC AL
OUT DX,AL
CALL D1MS
JNZ LOP2
JMP LOP1
解:程序运行后产生:三角波;
输出波形的幅值变化范围:-5V~+5V;
频率约为:2HZ。
5.有1个16通道的8位A/D 接口电路,占用I/O 地址260H~26FH ,启动转换后10us 即可读入转换结果,试编写16个通道循环采样一次的程序。
解:转换结果存入内存BUF 指示的后续单元中。
MOV DX ,260H
LEA SI ,BUF
MOV CX ,0010H
AA0:OUT DX ,AL
AA :MOV BH ,05H
NOP
DEC BH
JNZ AA
IN AL ,DX
MOV [SI],AL
INC SI
INC DX
LOOP AA0
HLT
6.什么叫采样保持电路的采样状态的保持状态请图示说明。
解:采样状态是指采样保持电路的输出端信号跟随输入信号的变化;
保持状态是指采样保持电路的输出端信号维持采样状态的最后时刻的输入信号。
7
且锯齿波周期可调。
解:参考电路:
假设端口地址为PORT ,参考程序如下:
AA :MOV DX ,PORT
MOV AL ,00H
MOV CX ,N
AA :OUT DX ,AL
ADD AL ,K
LOOP AA
JMP AA0
注:K 、N 用于改变周期,但K 、N 是正整数,且K*N 小于255。
采样状态 保持状态 DAC 0832 + I OUT1
I OUT2 - Rfb V O
8.设ADC0809的8个端口地址为260H~267H,试编制采用延时等待的方式采集数据的程序段(包括数据段定义)。
要求对8路通道进行循环采集,各采集100个数据分别存入8个数据区中。
解:注:假设延时程序可调用DELAY,时间足以保证一次A/D转换结束。
DATA SEGMENT
BUF0 DB 100()
BUF1 DB 100()
BUF2 DB 100()
BUF3 DB 100()
BUF4 DB 100()
BUF5 DB 100()
BUF6 DB 100()
BUF7 DB 100()
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
BEGIN:PUSH DS
XOR AX,AX
PUSH AX
MOV AX,DATA
MOV DS,AX
MOV CX,100
MOV SI,0000H
AA:MOV BX,OFFSET,BUF0
MOV DX,0260H
OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF1
OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF2
OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF3
OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF4
OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF5 OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF6 OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC DX
MOV BX,OFFSET BUF7 OUT DX,AL
CALL DELAY
IN AL,DX
MOV [BX+SI],AL
INC SI
LOOP AA
MOV AH,4CH
INT 21H
CODE ENDS
END BEGIN。