基于PLC的电机软启动系统的设计与实现
(原创)S7-300PLC电机起动控制(带参FC法)项目设计图解

(原创)S7-300PLC电机起动控制(带参FC法)项目设计图
解
具有手动、自动档的Y/△电机启动PLC控制系统
(带参FC的应用)
一、组态硬件:
双击CPU打开CPU属性设置窗口,选择“启动”标签,设置启动方式(S7-300只有暖启动方式):
打开“周期/时钟存储器”设置扫描周期监视时间,即看门狗时间(默认为150ms):
打开“保留存储器”标签设置停电保持型存储器的范围(默认0-16)
二、结构化程序编写
1、在项目管理器中选择相应站点,并打开程序下的组织块,在块视图中右击“插入新对象
/组织块”,新建一个功能程序FC100
2、双击进入FC编程环境,首先设置功能程序的接口变量
3、输入梯形图程序,元件符号输入时右击鼠标“插入符号”并选择相应已经定义好的接口
变量作为元件符号。
4、功能程序输入完毕,保存退出,回到站点管理器打开站点中块视图,双击打开主模块
OB1,在其中调用功能程序FC100
并在接口处接入相应的控制按钮和输出
三、运行仿真
1、打开仿真器
2、选择项目管理器中相应站点程序文件夹中的“块”,将整个站点信息下载到CPU
3、设置仿真环境,打开用到的输入输出端口进行图形仿真。
《基于软PLC的PID控制系统的设计与实现》

《基于软PLC的PID控制系统的设计与实现》一、引言随着工业自动化程度的不断提高,PID(比例-积分-微分)控制系统在工业生产过程中扮演着越来越重要的角色。
而软PLC (软件可编程逻辑控制器)技术的出现,为PID控制系统的设计与实现提供了新的可能性。
本文将详细介绍基于软PLC的PID控制系统的设计与实现过程,以期为相关领域的研究与应用提供参考。
二、系统设计1. 需求分析在系统设计阶段,首先需要对实际工业生产过程中的控制需求进行详细分析。
确定系统需要控制的设备类型、控制精度、响应速度等关键指标。
同时,还需考虑系统的可扩展性、稳定性及易用性等因素。
2. 整体架构设计基于需求分析,设计整体架构。
软PLC作为核心控制单元,负责接收上位机的控制指令,并根据PID控制算法对现场设备进行控制。
系统架构包括上位机、软PLC控制单元、现场设备及传感器等部分。
3. PID控制算法设计PID控制算法是系统的核心部分,根据误差来调整控制量,使系统达到预期的控制效果。
设计过程中,需根据实际需求选择合适的PID控制算法,并确定算法的参数。
三、系统实现1. 软PLC控制单元的实现软PLC控制单元采用嵌入式系统实现,包括硬件平台选择、操作系统选择、编程环境搭建等步骤。
在编程环境中,使用梯形图或指令表等方式编写控制程序,实现PID控制算法。
2. 上位机软件实现上位机软件负责与软PLC控制单元进行通信,发送控制指令并接收反馈信息。
采用合适的通信协议,保证数据传输的实时性和准确性。
同时,上位机软件还需提供友好的人机界面,方便用户进行操作和监控。
3. 现场设备及传感器实现现场设备及传感器负责采集现场数据并将数据传输给软PLC 控制单元。
设备及传感器的选择需根据实际需求进行,保证数据的准确性和实时性。
同时,需考虑设备的可靠性和维护性。
四、系统测试与优化1. 系统测试在系统实现后,需要进行系统测试,包括功能测试、性能测试、稳定性测试等。
通过测试,发现系统中存在的问题并进行修复。
基于PLC的电机控制系统与实现
基于PLC的电机控制系统与实现摘要:PLC的电机控制系统在现代自动化生产中至关重要的,电机是现代自动化生产中最为常用的动力设备之一,是现代工业生产中必不可少的一环。
本文主要介绍了PLC电机控制系统的软件设计及实现,包括程序设计、编程语言、状态检测、动作控制、故障检测和报警处理等方面。
通过对软件设计的合理搭配和运用,可以构建出功能强大、稳定可靠的PLC电机控制系统,以满足不同工业应用场景的需求。
同时,本文还强调了软件设计在整个系统中的重要性,是整个系统的灵魂所在。
关键字:PLC电机控制系统;软件设计;编程语言0前言现代工业生产中,电机控制系统是必不可少的一环。
PLC(Programmable Logic Controller,可编程逻辑控制器)作为一种通用的工业控制设备,被广泛应用于电机控制系统中。
PLC电机控制系统可以实现电机的启动、停止、正转、反转、变速等控制操作,同时能够实时检测电机状态,监测故障,并给出相应的报警提示。
而这一切的实现离不开系统软件设计与实现。
本文将介绍PLC电机控制系统的软件设计,包括程序设计、编程语言、状态检测、动作控制、故障检测和报警处理等方面,以帮助读者更好地理解PLC电机控制系统的工作原理和软件设计流程。
1PLC的电机控制系统重要性PLC的电机控制系统在现代自动化生产中扮演着至关重要的角色。
电机作为现代自动化生产中最为常用的动力设备之一,其控制对于生产效率、产品质量、节能降耗等方面均具有重要意义。
PLC电机控制系统利用PLC的高效性能和可编程性,实现对电机的精准控制,能够提高生产线的稳定性、减少生产线的故障率、提高生产效率、降低能源消耗、优化生产成本等,从而极大地增强了生产线的竞争力。
因此,PLC的电机控制系统的重要性不言而喻,对于现代自动化生产具有不可替代的作用。
2PLC电机控制系统设计思路设计PLC电机控制系统的基本思路包括确定系统要实现的功能、选择适合的PLC型号、编写控制程序、选择合适的输入输出模块和传感器执行器、进行系统联调和测试、完成系统安装和调试以及完善系统文档和培训。
用PLC实现单台软起动器对多台电动机起动

用PLC实现单台软起动器对多台电动机起动传统的电动机起动的方法用于要求不高的场合,而选用软起动装置对于要求较高的场合应用。
软起动采用限流、电子起动、智能制动等工作方式。
软起动器适用于大容量电动机的控制。
用PLC来实现单台软起动器对多台电动机的起动式微电子技术和计算机相结合的,体现了小型化、专用化特点,应用越来越广泛。
标签:软起动器;PLC控制系统;手动过程;自动过程软起动器的应用范围广泛,在机械制造、冶金、石化、化纤纺织、食品加工产业领域的各类电力拖动。
取代了Y—△起动器、磁控式起动器、自耦减压起动。
软起动的起动电流可控制在3倍的额定电流以下,使电动机可以平稳起动。
通常异步电动全电压下运行过程中,电动机从空载起动到满载负荷的过程中磁场几乎不变。
因此磁化电流在所有负载下基本上是相同。
所以电机在全压起动时对电网的冲击最大,并且冲击时间也最长。
而通常使用的降压起动对电网的冲击比较小,但当某一个线圈电压切换时会出现二次冲击现象,使破坏程度加大。
软起动在起动前设定了一个对电网不影响的起动电流,电机电流是缓慢增大到设定起动电流,因此没有冲击电流,所以对电网的影响几乎没有,并且消除起动力矩带来冲击。
软起动器为电子调压并对电流实时检测,因此具有相序自动识别及纠正断相、三相电源不平衡、晶闸管超温、缺相、过载、等全电子保护。
1 总体方案本系统中选用一台软起动器对四台电动机的起动。
控制系统要求:一台软起动器起动四台风机,四台风机两台使用,两台备用。
单台风机45Kw。
使用要求:(1)每台都应有手动、自动两种选择,用开关人工设定;(2)无论手动、自动时,风机均由软起动器起动;(3)二用二备,控制程序中要能自动识别;(4)自动运行中,两台风机风量不够时,备用风机要能手工起动运行,通过控制程序实现软起动器起动运行。
软起动器在主电路中的接线如图所示,软起动器输、输出接接触器KMl、KM2、KM3、KM4常开触点,软起动器输入和输出端串联接触器KM和接触器KM2的常开触点。
基于PLC的控制电动机起动与停止系统设计
基于PLC的控制电动机起动与停止系统设计1.设计的意义随着工业的发展,继电器控制系统无法达到相应的要求,因此根据不同行业不同用户的要求开发专用的皮带运输机的控制系统,为此采用PLC控制皮带运输机控制系统是十分必要的。
采用可编程控制器﹙PLC﹚控制的系统优势有,1.可靠性高,皮带机综保装置以 PLC控制器为核心,系统具备高可靠性和强抗干扰性等特点,对环境要求不高,适用于恶劣环境中工作。
2.配置灵活,PLC在组态系统时具有极大的灵活性,具有极强的处理能力,以及大的I/O容量。
当现场控制要求发生变化时,只需改变程序即可, 3.设备扩展性强,PLC有很强的组网和扩展能力,今后可以很方便添加新设备和皮带控制。
从而避免了以前上一套设备需更换一套控制设备的弊端,节省了大量人力和财力。
4.维护方便,模块连接采用插拔式接线端子排,更换、维护非常方便。
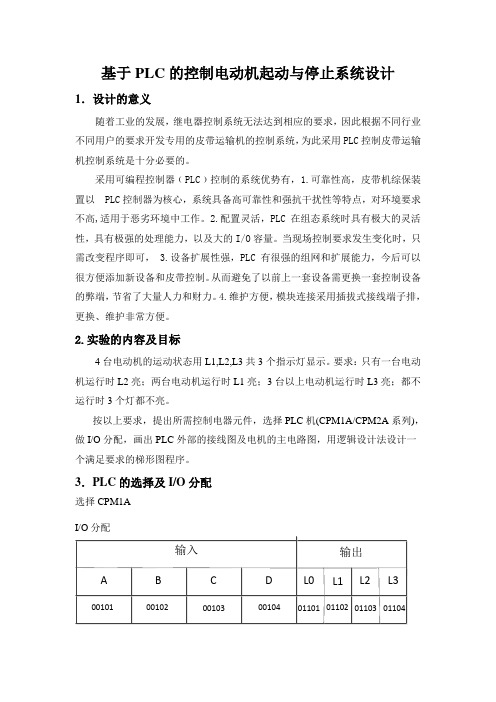
2.实验的内容及目标4台电动机的运动状态用L1,L2,L3共3个指示灯显示。
要求:只有一台电动机运行时L2亮;两台电动机运行时L1亮;3台以上电动机运行时L3亮;都不运行时3个灯都不亮。
按以上要求,提出所需控制电器元件,选择PLC机(CPM1A/CPM2A系列),做I/O分配,画出PLC外部的接线图及电机的主电路图,用逻辑设计法设计一个满足要求的梯形图程序。
3.PLC的选择及I/O分配选择CPM1AI/O分配输入输出A B C D 00101001020010300104L1L2L3011020110301104 L0011014. 硬件设计(画出硬件接线图)5.软件设计(程序清单以及程序的文字说.明等)L0:ABCD四个电动机都不转动,没有一个灯亮。
L1:在L0没有亮时,如果两个电动机转动,L1亮L2:在L0和L1都没亮时,如果有一个电动机转动,L2亮L3:当三个或者四个电动机转动时,L3亮中间程序是按顺序反应下去,一个不行则试运下一个,直到灯亮,程序运行停止。
6.心得体会通过本次课程论文设计,我巩固了课堂上所学的知识,对其更深层次的理解,并加以应用。
一种基于PLC的电机组软启停的程序设计
。机械 与电子0
S IN E&T C NO O F MA I CE C E H L GYI OR TON N
20 0 9年
第3 1期
一
种基于 P C的电机组软 启停 的程序设计 L
吕世 斌 刘鸿 利
( 甘肃 华 亭煤 电集 团股份 有 限公 司东 峡煤矿 甘肃 华 亭
【 摘
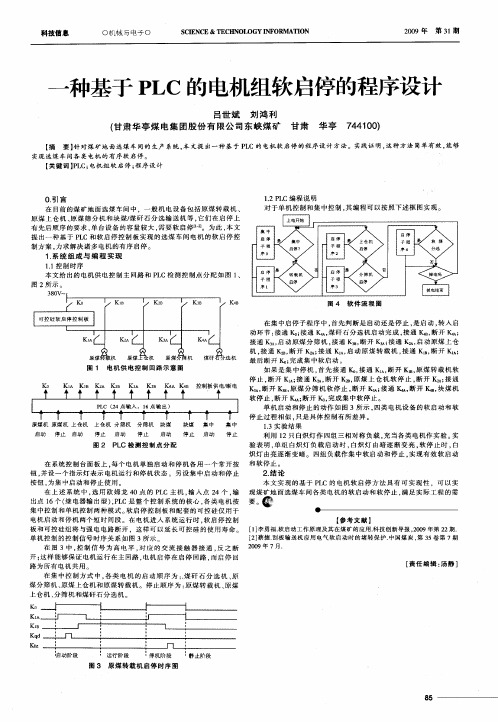
原煤机 原煤 机 上 仓机 启 动 停止 启动
上仓 机 丹辅机 停止 启动
分 筛机 停止
块 煤 启动
块煤 集 中 停 止 启动
集 中 停止
13实 验结 果 -
图 2 P C 检 测 控 制 点 分 配 L
利用 1 2只 自炽 灯 作 四组 三 相 对 称 负 载 , 当各 类 电 机 作 实 验 。 充 实 验 表 明 , 组 白炽 灯 负 载 启 动 时 , 炽 灯 由暗 逐 渐 变 亮 , 停 止 时 , 单 白 软 白 炽灯 由亮 逐 渐 变 暗 。 四组 负 载 作 集 中软 启 动 和 停 止 , 现 有 效 软 启 动 实
图 1 电 机 供 电 控 制 回 路 示 意 图
K0 Kl K1 Kz K2 K3 K3 K4 K4 控制板 供 电/ 电 A B ^ B A B A B 断
最 后 断 开 ; 成 集 中软 启 动 。 完 如 果 是 集 中停 机 , 先 接 通 l , 通 K 断 开 K 原 煤 转 载 机 软 首 (接 0 , 。 , 停 止 , 开 K 接 通 K 断 开 K 原 煤 上 仓 机 软 停 止 , 开 K 接 通 断 ; , , 断 ;
集 中 控 制 和单 机 控制 两 种 模 式 。 启 停 控 制 板 和 配 套 的 可 控 硅 仅 用 于 软 电机 启 动 和停 机 两个 短 时 间段 。在 电机 进 入 系 统 运 行 时 , 启 停 控 制 软
电动机智能软起动控制系统的研究与设计(PLC)
免责声明:文档在线网中所有的文档资料均由文档在线网会员提供,该文档资料的版权属于提供者所有。
文档在线网会对会员提供的文档资料进行筛选和编辑,但是并不声明或保证其内容的合法性和正确性。
毕 业 设 计 论 文题 目 电动机智能软起动控制系统的研究与设计(PLC )(院)系 电气与信息工程系 专业 自动化 班级 0101班 学号 010******* 学生姓名 肖 正 导师姓名 胡俊达(教授) 完成日期 2005年6月15日湖南工程学院毕业设计(论文)任务书设计(论文)题目:电动机智能软起动控制系统的研究与设计(PLC)姓名肖正系别电气与信息系专业自动化班级0101 学号0106指导老师胡俊达教研室主任唐勇奇一、本任务及要求:针对大中型异步电动机起动时的冲击电流问题及各类降压起动的方式进行分析研究,设计出一种以可编程序控制器(PLC)为控制核心的软起动和保护系统。
该系统除了能完成软起动功能外,还应具有多种保护功能,如断相、短路、过流、漏电闭锁等,并对变频器用于软起动的安全同步切换问题进行探讨。
主要设计内容:1系统主电路原理图,元器件计算2系统的软、硬件设计二、进度安排及完成时间:3月7日-3月26日查阅资料、撰写文献综述、撰写开题报告。
3月27日-4月9日毕业实习、撰写实习报告。
4月10日-4月22日主要完成系统硬件构建的初步设计。
4月23日-5月10日修改系统硬件构建设计。
5月11日-5月20日完成系统的主电路设计与元器件计算。
5月21日-5月29日完成系统的软件设计。
5月30日-6月11日完成系统主电路原理图的绘制,撰写毕业设计说明书(论文)。
6月12日-6月16日修改、装订毕业设计说明书、指导教师评阅。
6月17日-6月20日毕业设计答辩(公开、分组答辩)。
湖南工程学院毕业设计论文目录摘要 (Ⅰ)Abstract (Ⅱ)第1章异步电动机及其起动方式1.1异步电动机 (1)1.1.1异步电动机概述 (1)1.1.2异步电动机全压直接起动的危害 (4)1.1.3异步电动机常用的起动方式 (6)1.2软起动概述 (7)1.2.1软起动的概念 (7)1.2.2软起动常用的起动方式 (9)1.2.3软起动的运行特点 (9)1.2.4软起动应用场合 (9)1.2.5几种大中型异步电动机软起动方式在高压电动机软起动应用中的综合比较 (9)第2章可编程序控制器及其特殊功能模块2.1可编程序控制器 (13)2.1.1可编程序控制器的概念及历史 (13)2.1.2可编程序控制器的主要特点 (13)2.1.3可编程序控制器最新发展趋势 (15)2.1.4可编程序控制器的工作原理 (15)2.1.5可编程序控制器的基本结构 (17)2.1.6可编程序控制器的I/O滞后现象 (18)2.1.7可编程序控制器编程语言的国际标准 (18)2.2可编程序控制器特殊功能模块 (20)2.2.1模拟量输入输出模块 (20)第3章PID控制及其调节规律3.1 PID控制 (21)3.1.1 PID控制的概念 (21)3.1.2 PID控制的特点 (21)3.2 PID控制器 (22)3.2.1数字PID控制 (23)3.2.2 数字PID控制器的设计 (23)3.3 PLC的PID模块分析研究 (23)3.3.1 PID控制器设计及实现 (25)3.3.2现场实验校验 (26)第4章系统原理及方案设计4.1 基于PLC的大中型软起动控制系统 (27)4.1.1 系统的基本工作原理及结构特点 (27)4.1.2系统原理分析 (28)4.2磁控式PLC电动机起动控制系统结构的研究与设计 (28)4.2.1系统原理及方案设计 (29)4.2.2 硬件设计 (30)电动机智能软起动控制系统的研究与设计(PLC)4.2.3 软件编程 (31)4.3基于单台软起动器对多台异步电动机的软起动 (32)4.3.1主回路图 (32)4.3.2软件编制 (33)第5章大中型异步电动机变频—工频同步切换研究5.1变频器的输出切换方法分类 (35)5.2硬切换的危害及改进方法 (36)5.3同步切换(软切换) (38)5.4锁相控制 (38)5.5变频器旁路与软起动器的分析比较 (39)5.6同步切换问题小结 (40)结束语 (41)参考文献 (42)致谢 (44)附录A 基于PLC的磁控式软起动器的主程序 (45)附录B 基于单台软起动器对多台电动机实现软起动的主程序 (47)附录C PID运算主程序 (54)湖南工程学院毕业设计论文电动机智能软起动控制系统的研究与设计摘要:本文阐述了PLC技术在大中型异步电动机软起动自动控制中的应用及其优越性,并给出了具体的实施办法。
基于台达PLC的电机软启动器的设计
用 于 电力 拖 动 系 统 中 。但 电机直 接 启
动 时 瞬 间 电流 非 常 大 ,对 周 围 电 网产 生 严 重 的冲 击 ,影 响设 备 本 事 的使 用 寿 命 。启 动 瞬 间 转矩 造 成 的 机械 冲 击 也 会 影 响其 本 身 及拖 动 设 备 的 使用 寿
达 P LC控 制 液 态 电 阻 的 软 起 动 器 。
2基 于 P L  ̄的 电机 软 启 动 器 硬 件 设 计
2 . 1电机 软启 动器 控制 结构
电机 软 启 动 器控 制 结 构 如 图 1所 示 ,系 统 以台达 DVP . E H系列的 P L C 为 核 心控 制 单 元 ,包 括 有 上 位 机 ,上 位机通 过 P C / P P I电 缆 与 P L C 的 通 信 端 口相 连 , 上位 机 通 过 编程 软件 编 写 程序 ,或者 修改 、下载 、上传 程序 等 ,
系统 应用
S YS TEM AP P LI CA丁I ON
基于台达 P L C 的 电机软启动器 的设计
A De s i gn o f Mo t or 5 o f t S t a r t e r B a s e d on De l t a P L C
武汉 纺织 大学 电子 与 电气工程 学 院 祁 玉 兰 ( Qi Yu l a n )
பைடு நூலகம்
摘
要 :分 析 了交 流 异 步 电 动 机软 启 动 器 的 工 作 原 理 ,详 细 介 绍 了 基 于 台达 P L C的 电机 软 起 动 系 统 的 硬
件 实现 和 软 件 编 程。 提 出了 分 段 线 性 化 液态 电 阻的 思 想 ,使 软 起 动 过 程 更 加 符 合 实 际 电 阻的 变 化 , 软启 动效 果 更 好。 并 添 加 了人 机 界 面 ,可 以 选择 软 启 动器 的运 行 方式 以适 应现 实 。 整 个 电路 简 单 紧 奏,安装 、
plc电机启动实验课程设计
plc电机启动实验课程设计一、教学目标本课程旨在通过PLC电机启动实验,使学生掌握PLC电机启动的基本原理和操作方法,培养学生的动手能力和实际操作技能。
同时,通过实验课程的学习,增强学生对自动化技术的认识和兴趣,培养学生的创新意识和团队合作精神。
具体的教学目标包括:1.知识目标:使学生了解PLC电机启动的基本原理,掌握PLC电机启动的程序设计和操作方法。
2.技能目标:培养学生能够独立完成PLC电机启动实验的程序设计和操作,提高学生的动手能力和实际操作技能。
3.情感态度价值观目标:通过实验课程的学习,使学生增强对自动化技术的认识和兴趣,培养学生的创新意识和团队合作精神。
二、教学内容本课程的教学内容主要包括PLC电机启动的原理、PLC电机启动的程序设计和PLC电机启动的操作方法。
1.PLC电机启动的原理:介绍PLC电机启动的基本原理,包括PLC的工作原理、电机的工作原理等。
2.PLC电机启动的程序设计:讲解PLC电机启动的程序设计方法,包括程序的编写、调试和优化等。
3.PLC电机启动的操作方法:介绍PLC电机启动的操作方法,包括操作步骤、操作注意事项等。
三、教学方法本课程的教学方法主要包括讲授法、实验法和实践法。
1.讲授法:通过讲解PLC电机启动的原理、程序设计和操作方法,使学生掌握相关的理论知识。
2.实验法:通过PLC电机启动实验,使学生动手实践,加深对理论知识的理解和掌握。
3.实践法:通过实际操作,使学生掌握PLC电机启动的操作方法和技巧。
四、教学资源本课程的教学资源主要包括教材、实验设备和多媒体资料。
1.教材:选用合适的教材,为学生提供系统的理论知识学习。
2.实验设备:准备必要的实验设备,如PLC控制器、电机等,为学生提供实际操作的机会。
3.多媒体资料:利用多媒体资料,为学生提供丰富的学习资源和直观的学习体验。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分,每个部分分别占总分的30%、30%和40%。
基于PLC的高压异步电机软起动控制
图l 氨压 缩 机组 系统 一 次 线路 图。 了限 制起 动 为 为
电 流 , 电机 三 相 定 子 绕 组 末 端分 别 串入 一 个 可 变 液 在
体 电 阻, 体 电阻 的 大 小 由一 台 电极 升降 电动 机 改 变 液
作者简介: 罗卫华, 国家注册安 全工程师, 电气工程师, 事化 从
等特点 。
液 阻柜 动 极 板和 静极 板 的距 离实 现 。 主机 起 动结 束 后 ,
星 点柜 开 关合 闸, 液体 电阻短 接 , 将 软起 动 装 置在 主 回
路 中完 全 处于 零 电位 , 极 板 白动 复位 , 下 次起 动 作 动 为 好 准备 。
1 V Ok
该 软起 动 装置 采 用具 有 国 内领 先水 平 的计 算 机仿
L UO W e- u , AO Ha i a XI h i
(ih a Mef g hmiaId syC . t Deag6 80 , ia Sc un i n C e cl ut o Ld yn 10 0Ch ) e n r , , n
A sr c: e ue ot e trn me o o h g otg id c o b t tArd cdv l g a t g t d f i a a s i i l hv l e n u t nmoo i it d c d Se n ¥ —0 N r s L s sda te o t l a i trs n o u e . ime s 72 0C si P Ci ue sh c nr r ee o
图 1 氨压 缩机组 一次线 路 图
装置 自动改变液体 电阻动 、 定极板之问的问距, 电阻 使
线性均匀减小, 电机 端 电压 均 分 配和 接 线