高中物理必修一牛顿第二定律传送带模型
物理人教版(2019)必修第一册4.5牛顿第二定律的应用2-传送带问题
(1)物块下滑到斜面底端B处的速度大小; (2)物体在传送带上做匀加速运动的加速度的大小和物块运动到C 处的速度大小; (3)其它条件都不变,只改变传送带的速度大小,要使物块在最 短时间内到达传送带的最右端C处,传送带的速度至少为多大?
倾 斜 传 送 带
滑块在 传送带 初速度 不为0
滑块在 传送带 初速度
为0
µ<tanθ,一直加速
同 向 v传从上向下
v0>v传 v0<v传
µ>tanθ,x>l,一直减速 µ>tanθ,x<l,先减速后匀速
x>l,一直加速 µ>tanθ,x<l,先加速后匀速 µ<tanθ,x<l,先以a1加速后以a2加速
【讨论】a.运动时间;b.相对位移;c.运动图像。
1.传送带比较短时。提示:物体运动到B端时有v物≤v0.
v0
v物
A
B
2.传送带较长。提示:物体还未到v物达=vB0 端时就有v物=v0. v0
A
B
二、水平传送带类型分析
(一)无初速度的滑块在水平传送带上的运动情况分析
例1.如图所示,水平放置的传送带以速度v=2m/s向右运行, 现将一小物体轻轻放在传送带A端,物体与传送带间的动 摩擦因数µ=0.2。若A端与B 端相距l=4m,g=10m/s2。
二、水平传送带类型分析
(一)有初速度的滑块在水平传送带上的运动情况分析
【典例分析3】如图所示,小物体以v0=4m/s的速度从左 端冲上两端相距l=5m的传送带。已知物体与传送带之间 的动摩擦因数µ=0.2,传送带向左的速度v=2m/s, g=10m/s2。求物体在传送带上的运动时间。
(完整版)高中物理传送带模型(解析版)
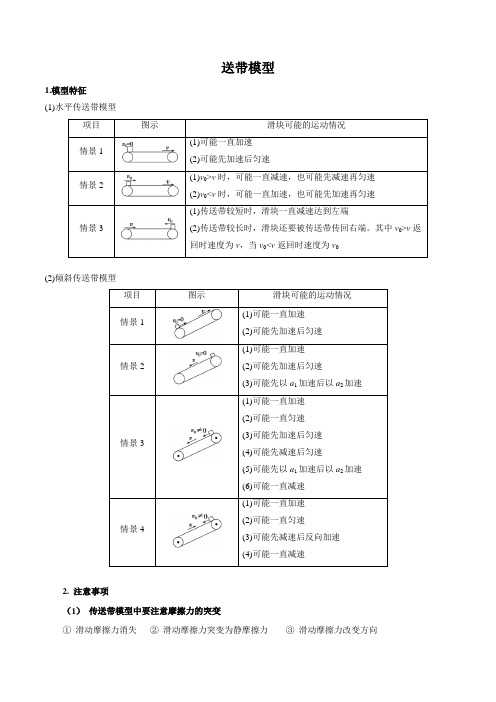
送带模型1.模型特征(1)水平传送带模型项目图示滑块可能的运动情况情景1(1)可能一直加速(2)可能先加速后匀速情景2(1)v0>v时,可能一直减速,也可能先减速再匀速(2)v0<v时,可能一直加速,也可能先加速再匀速情景3(1)传送带较短时,滑块一直减速达到左端(2)传送带较长时,滑块还要被传送带传回右端。
其中v0>v返回时速度为v,当v0<v返回时速度为v0(2)倾斜传送带模型项目图示滑块可能的运动情况情景1(1)可能一直加速(2)可能先加速后匀速情景2(1)可能一直加速(2)可能先加速后匀速(3)可能先以a1加速后以a2加速情景3(1)可能一直加速(2)可能一直匀速(3)可能先加速后匀速(4)可能先减速后匀速(5)可能先以a1加速后以a2加速(6)可能一直减速情景4(1)可能一直加速(2)可能一直匀速(3)可能先减速后反向加速(4)可能一直减速2. 注意事项(1)传送带模型中要注意摩擦力的突变①滑动摩擦力消失②滑动摩擦力突变为静摩擦力③滑动摩擦力改变方向(2)传送带与物体运动的牵制。
牛顿第二定律中a 是物体对地加速度,运动学公式中S 是物体对地的位移,这一点必须明确。
(3) 分析问题的思路:初始条件→相对运动→判断滑动摩擦力的大小和方向→分析出物体受的合外力和加速度大小和方向→由物体速度变化再分析相对运动来判断以后的受力及运动状态的改变。
【典例1】如图所示,传送带的水平部分长为L ,运动速率恒为v ,在其左端无初速放上木块,若木块与传送带间的动摩擦因数为μ,则木块从左到右的运动时间可能是( )A.L v +v 2μgB.L vC.2L μgD.2L v【答案】 ACD【典例2】如图所示,倾角为37°,长为l =16 m 的传送带,转动速度为v =10 m/s ,动摩擦因数μ=0.5,在传送带顶端A 处无初速度地释放一个质量为m =0.5 kg 的物体.已知sin 37°=0.6,cos 37°=0.8,g =10 m/s 2.求:(1)传送带顺时针转动时,物体从顶端A 滑到底端B 的时间; (2)传送带逆时针转动时,物体从顶端A 滑到底端B 的时间. 【答案】 (1)4 s (2)2 s【典例3】如图所示,与水平面成θ=30°的传送带正以v =3 m/s 的速度匀速运行,A 、B 两端相距l =13.5 m 。
牛顿第二定律传送带模型含答案

7.如图5所示,水平传送带A、B两端相距x=4 m,以v0=2 m/s的速率顺时针转动,将一小煤块无初速度地放到A点,已知小煤块与传送带间的动摩擦因数为0.4,取g=10 m/s2,由于小煤块与传送带之间有相对滑动,故会在传送带上留下划痕,则小煤块从A运动到B的过程中()图5A.所用的时间为2.25 sB.所用的时间为0.5 sC.划痕长度为4 mD.划痕长度为0.5 m解析小煤块在传送带上滑动时,根据牛顿第二定律有:μmg=ma,解得a=4 m/s2,当小煤块和传送带速度相同时,位移为x1=v202a=0.5 m<4 m,因此小煤块先加速后匀速,加速时间为t1=v0a =0.5 s,匀速运动时间t2=x-x1v0=1.75 s,小煤块从A运动到B的过程中所用时间为t=t1+t2=2.25 s,故选项A正确,B错误;在加速阶段相对位移产生划痕,故有Δx=v0t1-x1=0.5 m,故选项C错误,D正确。
答案AD【例1】如图1所示,水平长传送带始终以v匀速运动,现将一质量为m的物体轻放于A端,物体与传送带之间的动摩擦因数为μ,AB长为L,L足够长。
问:图1(1)物体从A到B做什么运动?(2)当物体的速度达到传送带速度v时,物体的位移多大?传送带的位移多大?(3)物体从A到B运动的时间为多少?(4)什么条件下物体从A到B所用时间最短?解析(1)物体先做匀加速直线运动,当速度与传送带速度相同时,做匀速直线运动。
(2)由v=at和a=μg,解得t=v μg物体的位移x1=12at 2=v22μg传送带的位移x2=vt=v2μg (3)物体从A到B运动的时间为t总=vμg +L-x1v=Lv+v2μg(4)当物体从A到B一直做匀加速直线运动时,所用时间最短,所以要求传送带的速度满足v≥2μgL。
答案(1)先匀加速,后匀速(2)v22μgv2μg(3)Lv+v2μg(4)v≥2μgL【拓展延伸1】若在【例1】中物体以初速度v0(v0≠v)从A端向B端运动,则:(1)物体可能做什么运动?(2)什么情景下物体从A到B所用时间最短,如何求最短时间?解析(1)①若v0<v,物体刚放到传送带上时将做a=μg的匀加速运动。
高中物理 高一 必修1 传送带模型

(1)物体在传送带上运动的时间;
(2)如果提高传送带的运行速率,物体就能被较快地传送到B处,求
传送带对应的最小运行速率。
[解析] (1)物体在传送带上加速时:μmg=ma
v=at1,x=12at1 2
物体在传送带上匀速时:L-x=vt2 解得:t=t1+t2=2.5 s。 (2)要使物体从 A 处传送到 B 处的时间要最短,物体一 直加速,则 L=12at2 2,解得 t2=2 s v1=at2,解得 v1=2 m/s。 [答案] (1)2.5 s (2)2 m/s
传送带模型分析方法
1.受力分析 根据v物、v带的大小和方向关系判断物体所受摩 擦力的大小和方向,注意摩擦力的大小和方向 在v物=v带时易发生突变。 2.运动分析 根据 v物、v带 的大小和方向关系及物体所受摩 擦力情况判断物体的运动规律。(匀速,匀加 速,匀减速)
2019-2-26
4
(一)水平传送带
1、若传送带静止,求物体从A运动到B所需时间是多少?
2、若传送带以v=10m/s的速率逆时针转动,从A运动到B 所需时间是多少.
37 °
课堂练习3: 如图所示,传送带与地面倾角为37 ° ,从A到B长 度为16m,传送带以v=20m/s的速率逆时针转动. 在传送带上端A无初速地放一个质量为m=0.5kg的 物体,它与传送带之间的动摩擦因数为μ=0.5.求物 体从A运动到B所需时间是多少.(sin37°=0.6)
[例一] 现在传送带传送货物已被广泛地应用,如图所示为一水平
传送带装置示意图。紧绷的传送带AB始终保持恒定的速率v=1 m/s 运行,一质量为m=4 kg的物体被无初速度地放在A处,传送带对物
牛顿第二定律的综合应用——动力学中的“板块”和“传送带”模型

动力学中的“板块”和“传送带”模型一.“滑块—滑板”模型1. 模型特点:上下叠放两个物体,在摩擦力的相互作用下发生相对滑动。
2. 两种位移关系①物体的位移:各个物体对地的位移,即物体的实际位移。
②相对位移:一物体相对另一的物体的位移。
两种情况。
(1)滑块和滑板同向运动时,相对位移等两物体位移之差,即.21x x x -=∆相 (2)滑块和滑板反向运动时,相对位移等两物体位移之和,即.21x x x +=∆相 这是计算摩擦热的主要依据,.相滑x f Q ∆=3. 解题思路:(1)初始阶段必对各物体受力分析,目的判断以后两物体的运动情况。
(2)二者共速时必对各物体受力分析,目的判断以后两物体的运动情况。
二者等速是滑块和滑板间摩擦力发生突变的临界条件,是二者相对位移最大的临界点。
(3)物体速度减小到0时,受力分析,判断两物体以后是相对滑动还是相对静止。
相对静止二者的加速度a 相同;相对滑动二者的加速度a 不同。
(4)明确速度关系:弄清各物体的速度大小和方向,判断两物体的相对运动方向,从而弄清摩擦力的方向,正确对物体受力分析。
例.如图,两个滑块A 和B 的质量分别为m A =1 kg 和m B =5 kg ,放在静止于水平地面上的木板的两端,两者与木板间的动摩擦因数均为μ1=0.5;木板的质量为m =4 kg ,与地面间的动摩擦因数为μ2=0.1.某时刻A 、B 两滑块开始相向滑动,初速度大小均为v 0=3 m/s.A 、B 相遇时,A 与木板恰好相对静止.设最大静摩擦力等于滑动摩擦力,取重力加速度大小g =10 m/s 2.求:(1)B 与木板相对静止时,木板的速度; (2)A 、B 开始运动时,两者之间的距离.〖思路指导〗(1)AB 开始运动时,相向均做减速运动,二者初速等大,加速度等大,则经历相等时间,v ∆相等.即相同时刻速度等大.对A 、B 、木板分析B 和木板同向向右运动,A 和木板反向运动,故B 和木板先相对静止,A 减速到0后,反向加速再与木板共速. (2)B 和木板共速后是相对滑动还是相对静止,假设法讨论.相对静止的条件:f<f max . 解析:(1)B 和木板共速前,AB 加速度分别为a A 、a B ,木板加速度为a 1.经t 1木板和B 共速. 对A 向左减速,加速度大小:../5,211向右解得s m a a m g m A A A ==μ 对B 向右减速,加速度大小:.m /s 5,21==B B B B a a m g m 解得μ对木板,由于g m m m g m g B A A B )(m 211++>-μμμ,则合外力向右,向右加速运动../5.2,)(-m 211211s m a ma g m m m g m g B A A B ==++-解得μμμB 和木板共速有:,1110t a t a v B =-解得t 1=0.4s../110s m t a v v B B =-=0.8m.t 2v v x 1Bo B =+= A 的速度大小v A =v B =1m/s.(2)设B 和木板共速后相对静止,对B 和木板:./m 35,)m 22212s a a m m g m g m m B A B A =+=+++解得)((μμ向右减速运动. 对B 有,木板和A相对静止.假设正确,设再经t g,m μN 320a m f 2B 12B B <== A 全程加速度不变.对B 和木板:,222t a v v B -=对A 有:,222t a v v A +-=解得t 2=0.3s.v 2=0.5m/s.0.225m,m 409t 2v v x 22B /B ==+=0.875m.)t (t a 21)t (t v x 221A 210A =+-+= 故 1.9m.x x x L /B B A =++= 练习1. (水平面光滑的“滑块—滑板”模)如图所示,质量M =8 kg 的小车静止在光滑水平面上,在小车右端施加一水平拉力F =8 N .当小车速度达到1.5 m/s 时,在小车的右端由静止轻放一大小不计、质量m =2 kg 的物体,物体与小车间的动摩擦因数μ=0.2,小车足够长.从物体放上小车开始经t =1.5 s 的时间,物体相对地面的位移为(g 取10 m/s 2)( )A .1 mB .2.1 mC .2.25 mD .3.1 m解析:(1)刚放上物体时,对物体:.2m/s解得a ,ma μmg 211== 对小车:,/5.0,222s m a Ma mg F ==-解得μv 0=1.5m/s.设经t 1二者等速v 1.则2m/s.1s,v 解得t ,t a v t a v 11120111==+==此时物体运动:1m.t v 21x 111==故A 错.(2)共速后,设二者相对静止,整体:.0.8m/s,解得a m)a (M F 233=+= 对物体:μmg,<1.6N =ma =f 3假设正确.再经0.5s 物体运动:.1.2,1.12121223212m x x x m t a t v x =+==+=故故B 对CD 错.2. (水平面粗糙的“滑块—滑板”模型)如图所示,一长木板在水平地面上运动,在某时刻(t =0)将一相对于地面静止的物块轻放到木板上.已知物块与木板的质量相等,物块与木板间及木板与地面间均有摩擦,物块与木板间的最大静摩擦力等于滑动摩擦力,且物块始终在木板上.在物块放到木板上之后,木板运动的速度—时间图象可能是图中的( )解析:(1)物体刚放上木板,对木板:.a ,mg g )1121向左,减速运动(Ma M m =++μμ (2)共速后若二者相对静止:错,,则(BC a a Ma g M 2121,)m >=+μ 由于地面有摩擦,共速后木板做减速运动,故D 错。
牛顿第二定律应用专题:传送带模型课件-高一物理人教版(2019)必修第一册

带上原来没有任何工件。在t1=0时刻,将底部涂有黑色染料的一号
工件轻放于传送带的左端;t2=1s时,再将另一完全相同的二号工
件轻放于传送带的左端。已知传送带与工件之间的动摩擦因数为
0.6,g=10m/s2,不计传送带轮和工件的大小。下列说法正确的是
A.黑色的径迹将出现在木炭包的左侧
B.木炭包的质量越大,径迹的长度越短
C.传送带运动的速度越大,径迹的长度越短
D.木炭包与传送带间的动摩擦因数越大,径迹的长度越短
变式1. (多选)如图,顺时针匀速转动的水平传送带A、B两端相距 l=8m,
工件与传送带间的动摩擦因数μ=0.1 . 工件滑上A端瞬时速度vA=5 m/s,到
最短,则传送带速度至少为10m/s
53P103.6如图所示,三角形传送带以1m/s的速度逆时针匀速转动,
两侧的传送带长都是2m,且与水平方向的夹角均为37°。现有两
个小物块A、B(可视为质点)从传送带顶端都以1m/s的初速度沿
传送带下滑,物块与传送带间动摩擦因数均为0.5,取g=10m/s2,
sin37°=0.6,cos37°=0.8.下列说法正确的是( D )
《全品》P76第5题
[例1] 如图所示,水平传送带以4 m/s
的速度运动,传送带长ab=10 m。今
在其左端将一工件轻轻地放在上面,
工件被带动,传送到右端。已知工件
与传送带间的动摩擦因数μ=0.2,g取
10 m/s2,试求
(1)工件开始时加速度的大小a.
(2)工件由传送带左端运动到右端的
时间t.
(
)
A.第1s末,传送带上黑色痕迹长度为9m
高中物理传送带模型(最新)
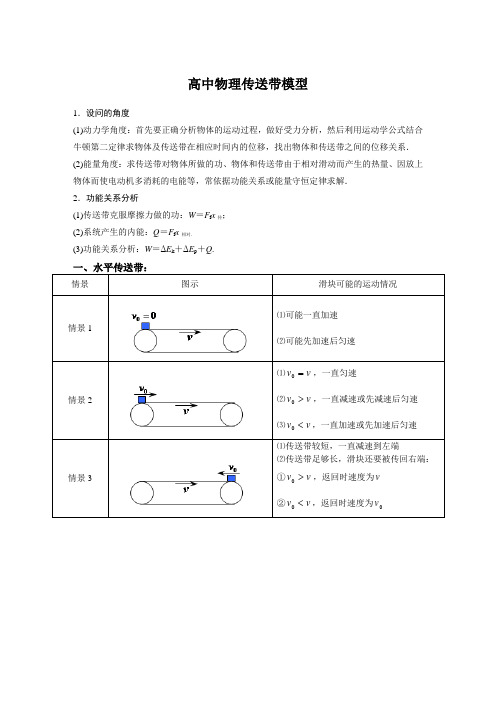
高中物理传送带模型1.设问的角度(1)动力学角度:首先要正确分析物体的运动过程,做好受力分析,然后利用运动学公式结合牛顿第二定律求物体及传送带在相应时间内的位移,找出物体和传送带之间的位移关系.(2)能量角度:求传送带对物体所做的功、物体和传送带由于相对滑动而产生的热量、因放上物体而使电动机多消耗的电能等,常依据功能关系或能量守恒定律求解.2.功能关系分析(1)传送带克服摩擦力做的功:W=F f x传;(2)系统产生的内能:Q=F f x相对.(3)功能关系分析:W=ΔE k+ΔE p+Q.一、水平传送带:情景图示滑块可能的运动情况情景1⑴可能一直加速⑵可能先加速后匀速情景2 ⑴vv=,一直匀速⑵vv>,一直减速或先减速后匀速⑶vv<,一直加速或先加速后匀速情景3 ⑴传送带较短,一直减速到左端⑵传送带足够长,滑块还要被传回右端:①vv>,返回时速度为v②vv<,返回时速度为v二、倾斜传送带:情景图示滑块可能的运动情况情景1 ⑴可能一直加速⑵可能先加速后匀速⑶可能从左端滑落情景2 ⑴可能一直加速⑵可能先加速后匀速⑶可能先以1a加速,后以2a加速情景3 ⑴可能一直加速⑵可能一直匀速⑶可能先加速后匀速⑷可能先减速后匀速⑸可能先以1a加速,后以2a加速情景4 ⑴可能一直加速⑵可能一直减速⑶可能先减速到0,后反向加速例1(多选)如图所示为某建筑工地所用的水平放置的运输带,在电动机的带动下运输带始终以恒定的速度v0=1 m/s顺时针传动.建筑工人将质量m=2 kg的建筑材料静止地放到运输带的最左端,同时建筑工人以v0=1 m/s的速度向右匀速运动.已知建筑材料与运输带之间的动摩擦因数为μ=0.1,运输带的长度为L=2 m,重力加速度大小为g=10 m/s2.以下说法正确的是()A.建筑工人比建筑材料早到右端0.5 sB.建筑材料在运输带上一直做匀加速直线运动C.因运输建筑材料电动机多消耗的能量为1 JD.运输带对建筑材料做的功为1 J答案AD解析 建筑工人匀速运动到右端,所需时间t 1=Lv 0=2 s ,假设建筑材料先加速再匀速运动,加速时的加速度大小为a =μg =1 m/s 2,加速的时间为t 2=v 0a =1 s ,加速运动的位移为x 1=v 02t 2=0.5 m<L ,假设成立,因此建筑材料先加速运动再匀速运动,匀速运动的时间为t 3=L -x 1v 0=1.5 s ,因此建筑工人比建筑材料早到达右端的时间为Δt =t 3+t 2-t 1=0.5 s ,A 正确,B 错误;建筑材料与运输带在加速阶段摩擦生热,该过程中运输带的位移为x 2=v 0t 2=1 m ,则因摩擦而生成的热量为Q =μmg (x 2-x 1)=1 J ,由动能定理可知,运输带对建筑材料做的功为W =12m v 02=1 J ,则因运输建筑材料电动机多消耗的能量为2 J ,C 错误,D 正确.例2 如图所示,绷紧的传送带与水平面的夹角θ=30°,传送带在电动机的带动下,始终保持v 0=2 m/s 的速率运行,现把一质量为m =10 kg 的工件(可视为质点)轻轻放在传送带的底端,经过时间t =1.9 s ,工件被传送到h =1.5 m 的高处,g 取10 m/s 2,求:(1)工件与传送带间的动摩擦因数; (2)电动机由于传送工件多消耗的电能. 答案 (1)32(2)230 J 解析 (1)由题图可知,传送带长x =hsin θ=3 m 工件速度达到v 0前,做匀加速运动,有x 1=v 02t 1工件速度达到v 0后,做匀速运动, 有x -x 1=v 0(t -t 1)联立解得加速运动的时间t 1=0.8 s 加速运动的位移x 1=0.8 m 所以加速度大小a =v 0t 1=2.5 m/s 2由牛顿第二定律有μmg cos θ-mg sin θ=ma 解得μ=32. (2)由能量守恒定律知,电动机多消耗的电能用于增加工件的动能、势能以及克服传送带与工件之间发生相对位移时摩擦力做功产生的热量. 在时间t 1内,传送带运动的位移 x 传=v 0t 1=1.6 m在时间t 1内,工件相对传送带的位移 x 相=x 传-x 1=0.8 m在时间t 1内,摩擦产生的热量 Q =μmg cos θ·x 相=60 J最终工件获得的动能E k =12m v 02=20 J工件增加的势能E p =mgh =150 J 电动机多消耗的电能 E =Q +E k +E p =230 J.例3如图所示,绷紧的传送带,始终以2 m/s 的速度匀速斜向上运行,传送带与水平方向间的夹角︒=30θ. 现把质量为10 kg 的工件轻轻地放在传送带底端P 处,由传送带传送至顶端Q 处.已知P 、Q 之间的距离为4 m ,工件与传送带间的动摩擦因数23=μ,取2/10s m g = (1)通过计算说明工件在传送带上做什么运动;(2)求工件从P 点运动到Q 点所用的时间.答案:⑴工件先以2/5.2s m 的加速度匀加速运动0.8m ,之后匀速;⑵时间s t t t 4.221=+=例4如图甲所示,绷紧的水平传送带始终以恒定速率v 1运行.初速度大小为v 2的小物块从与传送带等高的光滑水平地面上的A 处滑上传送带.若从小物块滑上传送带开始计时,小物块在传送带上运动的v -t 图象(以地面为参考系)如图乙所示.已知v 2>v 1,则( )A .t 2时刻,小物块离A 处的距离达到最大B .t 2时刻,小物块相对传送带滑动的距离最大C .0~t 2时间内,小物块受到的摩擦力方向先向右后向左D .0~t 3时间内,小物块始终受到大小不变的摩擦力作用 答案:B例5如图所示,水平地面上有一长L =2 m 、质量M =1 kg 的长板,其右端上方有一固定挡板.质量m =2 kg 的小滑块从长板的左端以v 0=6 m/s 的初速度向右运动,同时长板在水平拉力F 作用下以v =2 m/s 的速度向右匀速运动,滑块与挡板相碰后速度为0,长板继续匀速运动,直到长板与滑块分离.已知长板与地面间的动摩擦因数μ1=0.4,滑块与长板间的动摩擦因数μ2=0.5,重力加速度g 取10 m/s 2.求:(1)滑块从长板的左端运动至挡板处的过程,长板的位移x ; (2)滑块碰到挡板前,水平拉力大小F ;(3)滑块从长板的左端运动至与长板分离的过程,系统因摩擦产生的热量Q . 答案 (1)0.8 m (2)2 N (3)48 J 解析 (1)滑块在板上做匀减速运动, a =μ2mg m =μ2g解得:a =5 m/s 2根据运动学公式得:L =v 0t -12at 2解得t =0.4 s (t =2.0 s 舍去)碰到挡板前滑块速度v 1=v 0-at =4 m/s>2 m/s ,说明滑块一直匀减速 板移动的位移x =v t =0.8 m (2)对板受力分析如图所示,有:F +F f2=F f1其中F f1=μ1(M +m )g =12 N ,F f2=μ2mg =10 N 解得:F =2 N(3)法一:滑块与挡板碰撞前,滑块与长板因摩擦产生的热量: Q 1=F f2·(L -x ) =μ2mg (L -x )=12 J滑块与挡板碰撞后,滑块与长板因摩擦产生的热量:Q 2=μ2mg (L -x )=12 J 整个过程中,长板与地面因摩擦产生的热量: Q 3=μ1(M +m )g ·L =24 J 所以,系统因摩擦产生的热量: Q =Q 1+Q 2+Q 3=48 J法二:滑块与挡板碰撞前,木板受到的拉力为F 1=2 N (第二问可知) F 1做功为W 1=F 1x =2×0.8=1.6 J 滑块与挡板碰撞后,木板受到的拉力为:F2=F f1+F f2=μ1(M+m)g+μ2mg=22 NF2做功为W2=F2(L-x)=22×1.2 J=26.4 J 碰到挡板前滑块速度v1=v0-at=4 m/s滑块动能变化:ΔE k=20 J所以系统因摩擦产生的热量:Q=W1+W2+ΔE k=48 J.。
高中物理必修一牛顿第二定律传送带模型

f<mg sin θ时(f =μ mg cos θ)即:(μ< tanθ),滑块以a2=g sin θ - μg cos θ 做匀加速 运动(a与v0方向相同)
v
v0
v0
2倾斜传送带模型
情景3
v
v0 0
(3)v0>v传送带较短时, f>mg sin θ(f =μ mg cos θ)(μ > tanθ),滑块做匀 减速运动,a=g sin θ - μg cos θ(与v0方向相反);
f =mg sin θ(f =μ mg cos θ)(μ = tanθ),滑块做匀 速运动;
f<mg sin θ(f =μ mg cos θ)(μ< tanθ),滑块做匀 加速运动a=g sin θ - μg cos θ(与v0方向相同);
v0 v
t1
2倾斜传送带模型
情景3
v
v0 0
(3)v0>v传送带较长时, f>mg sin θ(f =μ mg cos θ)(μ > tanθ),滑块先 做匀减速运动,a=g sin θ - μg cos θ(与v0方向相 反);后做匀速运动
高中物理必修一牛顿第二 定律传送带模型
1水平传送带模型
情景2
v0
v
(1)v0=v,滑块一直做匀速运动
v0
1水平传送带模型
情景2
v0
v
v v0
(2)v0>v, 传送带较短时,滑块一直做匀加速 运动; 传送带较长时,滑块先做匀加速运 动后做匀速运动
v v0
t1
1水平传送带模型
情景2
v0
v
(3)v0<v, 传送带较短时,滑块一直做匀减速 运动;
v
v0ቤተ መጻሕፍቲ ባይዱ
t1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
v
v
v0
v0
t1
t1
O
O
-v0
tv
t
v
2倾斜传送带模型 情景1 v
v0 0
(1)f >mg sin θ(f =μ mg cos θ)(μ > tanθ), 传送带较短时,滑块一直做匀加速运动,a=μg cos θ - g sin θ(与v方向相同);
传 送 带 较 长 时 , 滑 块 先 做 匀 加 速 运 动 a= μ g cos θ - g sin θ(与v方向相同),后做匀速运动
v v0
t1
1水平传送带模型
情景2
v0
v
(3)v0<v, 传送带较短时,滑块一直做匀减速 运动;
传送带较长时,滑块先做匀减速运 动后做匀速运动
v0
v0
v
v
t1
1水平传送带模型
情景3
v
v0
(1)传送带较短时,滑块一直做匀 减速运动到达左端
v v0
O
v
t1
t
1水平传送带模型
情景3
v
v0
(2)传送带较长,可能先减速再反向加 速,v0<v,到达右端速度为v0;
f<mg sin θ(f =μ mg cos θ)(μ< tanθ),滑块先以 a1=g sin θ+μg cos θ(与v方向相同)加速运动 ,v0=v后以a2=g sin θ - μg cos θ(与v方向相同)
v
t1
v
t1
2倾斜传送带模型
情景3 v v0 0
(1)v0<v传送带较短时, 滑块做匀加速运动;
v v0
O
v
t1
t
2倾斜传送带模型
情景4
v
v0 0
v
(1)f>mg sin θ(f =μ mg cos θ)(μ > tanθ), 传送带较长时, v0<v,滑块先做匀减速运动后反向匀加速 到v0;a=g sin θ - μg cos θ(与v0方向相反)
v0 > v 滑 块 先 做 匀 减 速 后 反 向 匀 加 速 到 v,a=g sin θ - μg cos θ(与v0方向相反)
v
v0
v0
2倾斜传送带模型
情景3 v v0 0
(3)v0>v传送带较短时, f>mg sin θ(f =μ mg cos θ)(μ > tanθ),滑块做匀 减速运动,a=g sin θ - μg cos θ(与v0方向相反);
f =mg sin θ(f =μ mg cos θ)(μ = tanθ),滑块做匀 速运动;
f =mg sin θ(f =μ mg cos θ)(μ = tanθ),滑块做匀 速运动;
f<mg sin θ(f =μ mg cos θ)(μ< tanθ),滑块做匀 加速运动a=g sin θ - μg cos θ(与v0方向相同);
v0 v
t1
2倾斜传送带模型
情景4
f =μ mg cos θ)(μ > tanθ),传送带较短时, 滑块做匀减速运动,a=g sin θ - μg cos θ (与v0方向相反);
v
v0
v0
t1
t1
O
O
t
v
t
-v0
-v0
v
2倾斜传送带模型
情景4
v
v0 0
(2)f=mg sin θ(f =μ mg cos θ)(μ = tanθ),滑 块以v0匀速下滑; (3)f<mg sin θ(f =μ mg cos θ)(μ < tanθ), 滑块做匀加速运动,a=g sin θ - μg cos θ(与 v0方向相同);
v v0
2倾斜传送带模型
情景3 v v0 0
(1)v0<v传送带较长时, f ≥mg sin θ(f =μ mg cos θ)(μ ≥ tanθ),滑块先做匀 加速运动a=g sin θ+μg cos θ(a与v0方向相同)v0=v 后做匀速运动;
f<mg sin θ(f =μ mg cos θ)(μ< tanθ),滑块先以 a1=g sin θ+μg cos θ加速运动,v0=v后以a2=g sin θ - μg cos θ(a与v0方向相同)
v
v0
O
v
t1
t
v v0
O
v
t1
t
v v
t1
2倾斜传送带模型 情景1 v
v0 0
(2)f =mg sin θ(f =μ mg cos θ)(μ = tanθ),合 力为零,物体保持静止
(3)f< mg sin θ(f =μ mg cos θ)(μ< tanθ),合 力向下,物体从左端滑下
2倾斜传送带模型
情景2 v v0 0
f<mg sin θ(f =μ mg cos θ)(μ< tanθ),滑块做匀 加速运动a=g sin θ - μg cos θ(与v0方向相同);
v0 v
t1
2倾斜传送带模型
情景3 v v0 0
(3)v0>v传送带较长时, f>mg sin θ(f =μ mg cos θ)(μ > tanθ),滑块先 做匀减速运动,a=g sin θ - μg cos θ(与v0方向相 反);后做匀速运动
v v0
t1
v v0
t1
2倾斜传送带模型
情景3 v v0 0
(2)v0=v, f ≥mg sin θ时(f =μ mg cos θ)即:(μ ≥ tanθ), 滑块做匀速运动;
f<mg sin θ时(f =μ mg cos θ)即:(μ< tanθ),滑块以a2=g sin θ - μg cos θ 做匀加速 运动(a与v0方向相同)
(1)传送带较短时, 滑块一直做匀加速运动a=g sin θ+μg cos θ(与v方向相同)
v
2倾斜传送带模型
情景2 v v0 0
(2)传送带较长, f ≥mg sin θ(f =μ mg cos θ)(μ ≥ tanθ),滑块先加 速运动后匀速运动a=g sin θ+μg cos θ(与v方向 相同);
1水平传送带模型
情景1
v0 0
v
(1)传送带较短时,滑块一直做匀 加速运动
(2)传送带较长时,滑块先做匀加速 运动后做匀速运动
v v
t1
1水平传送带模型
情景2
v0
v
(1)v0=v,滑块一直做匀速运动
v0
1水平传送带模型
情景2
v0
v
v v0
(2)v0>v, 传送带较短时,滑块一直做匀加速 运动; 传送带较长时,滑块先做匀加速运 动后做匀速运动