多普勒雷达工作原理
多普勒雷达原理
多普勒雷达原理多普勒雷达是一种利用多普勒效应进行目标探测与测速的雷达系统。
它基于多普勒效应的原理,通过测量目标相对于雷达的速度变化,实现对目标的探测和跟踪。
本文将介绍多普勒雷达的原理以及其在实际应用中的作用。
一、多普勒效应的基本原理多普勒效应是由奥地利物理学家克里斯托夫·多普勒于1842年发现的。
它描述的是当发射器和接收器相对于运动的目标靠近或远离时,频率会发生变化的现象。
在雷达系统中,这种频率变化可以用来确定目标运动的速度。
当雷达向目标发送电磁波时,如果目标与雷达靠近,接收器收到的回波会发生频率上升的变化。
反之,如果目标与雷达远离,则回波的频率会下降。
这种频率变化被称为多普勒频移,它与目标的速度成正比。
二、多普勒雷达的工作原理多普勒雷达的基本工作原理是利用多普勒效应测量目标的速度。
它通过发射器发送高频的电磁波,并接收目标回波的信号。
接收到的信号经过信号处理后,可以得到目标相对于雷达的速度信息。
具体而言,多普勒雷达系统包括一个发射器和一个接收器。
发射器发射高频的连续波或脉冲波,这些波在空间中以一定的速度传播。
当波与运动的目标相遇时,发生回波。
接收器接收到回波信号后,通过频率分析等方法,提取出其中的多普勒频移。
多普勒频移的大小与目标相对于雷达的速度成正比。
根据多普勒频移的大小可以确定目标的运动状态,包括向雷达靠近或远离以及速度大小等信息。
这些信息对于目标的跟踪、识别和定位非常重要。
三、多普勒雷达在实际应用中的作用多普勒雷达在许多领域都有着广泛的应用。
以下是一些常见的应用场景:1. 气象雷达:多普勒雷达被广泛用于天气预报中的降水预测和风暴跟踪。
通过测量降水物体的速度和方向,可以预测降水的类型和强度,并及时发出预警,保护人们的生命和财产安全。
2. 空中交通管制:多普勒雷达可以用于监测飞机的速度、航向和高度,为航空机构提供实时的飞行信息。
这些信息对于空中交通管制的安全和效率非常重要。
3. 汽车雷达:多普勒雷达广泛应用于汽车领域的自动驾驶和智能安全系统中。
多普勒雷达工作原理
多普勒雷达工作原理多普勒雷达是一种利用多普勒效应进行测速和距离测量的设备。
多普勒效应是指当发射器和接收器相对于目标物体运动时,接收到的信号频率会发生变化的现象。
多普勒雷达利用这一原理,可以通过测量信号频率的变化来计算目标物体的速度和距离。
接下来我们将详细介绍多普勒雷达的工作原理。
首先,多普勒雷达通过发射无线电波来探测目标物体。
当发射器发出无线电波时,这些波会以一定的速度传播,并被目标物体反射回来。
接收器接收到这些反射波,并分析其频率的变化。
如果目标物体静止不动,那么接收到的频率不会发生变化。
但是,如果目标物体在运动,那么接收到的频率就会发生变化。
其次,多普勒雷达利用接收到的频率变化来计算目标物体的速度。
当目标物体朝着雷达设备运动时,接收到的频率会比发射时的频率高,而当目标物体远离雷达设备时,接收到的频率会比发射时的频率低。
通过测量频率的变化,多普勒雷达可以计算出目标物体的速度。
这种方法对于测量车辆的速度和飞机的速度非常有效。
最后,多普勒雷达还可以利用接收到的频率变化来计算目标物体与雷达设备之间的距离。
当目标物体靠近雷达设备时,接收到的频率会比发射时的频率高,而当目标物体远离雷达设备时,接收到的频率会比发射时的频率低。
通过测量频率的变化,多普勒雷达可以计算出目标物体与雷达设备之间的距离。
这种方法对于测量飞机和船只与雷达设备之间的距离非常有效。
综上所述,多普勒雷达利用多普勒效应来测量目标物体的速度和距离。
通过测量信号频率的变化,多普勒雷达可以准确地计算出目标物体的运动状态。
多普勒雷达在军事、航空、航海等领域有着广泛的应用,其工作原理的深入理解对于提高雷达设备的性能和精度至关重要。
希望本文对多普勒雷达的工作原理有所帮助。
09多普勒探测原理

射频功率振荡型气象多普勒雷达框图
天线 调制器
f0
f0 ± f D
接收机 混频器 中频放 大器 回波强度 显示器
发射机
f0
锁相混频 器
f0
天线收 发开关
fc fc
本地振 荡器
f1 ± f D ± fD Nhomakorabeaf1
相干振荡 器
f1
相位检测 器
径向速度 显示器
射频功率振荡型气象多普勒雷达框图
2r
2 ( r + ∆r ) 4π∆r
λ
(a)
λ
(b)
相继返回的两个回波信号之间的相位差为: 相继返回的两个回波信号之间的相位差为:∆ϕ = ϕ 2 − ϕ1 = − 目标物沿雷达波束径向速度的表达式为: 目标物沿雷达波束径向速度的表达式为:
λ
(c )
∆r λ∆ϕ PRF Vr = = PRF × ∆r = − PRT 4π
Ch. 8
多普勒雷达探测 的基本原理
多普勒效应
假设雷达的工作波长为 λ ,初始相位为 ϕ0 ,经过 R 距离处目标 2R 物的后向散射作用,返回信号的相位与初始相位相差 × 2π , λ 4π R 即 ϕ = ϕ0 − (8.1) λ
⇒ dϕ 4π dR =− ⋅ dt λ dt (8.2)
dR 规定朝向天线的运动速度为正,即:v = − 规定朝向天线的运动速度为正 朝向天线的运动速度为 dt dϕ 由于 = ω = 2π f 不同波长的雷达探测不同多普勒 dt 2v 速度,产生的多普勒频率也就不同。 速度,产生的多普勒频率也就不同。 ⇒ f = (8.3)
产生速度模糊的原因及解决措施
产生的原因:多普勒速度模糊现象的产生与雷达的波长和脉冲重复频 产生的原因: 1 率有关, 率有关,vr max = ± λ ⋅ PRF 。 4 解决办法: 解决办法:
脉冲多普勒雷达原理
脉冲多普勒雷达原理
脉冲多普勒雷达是一种利用脉冲信号来测量目标距离和速度的雷达系统。
它通过发射脉冲信号并接收目标反射的信号来实现目标的探测和跟踪。
脉冲多普勒雷达具有较高的测速精度和抗干扰能力,因此在军事、民用航空等领域得到了广泛的应用。
脉冲多普勒雷达的工作原理主要包括脉冲信号的发射和接收、目标回波信号的处理以及速度测量等几个方面。
首先,当脉冲多普勒雷达工作时,会发射一系列的脉冲信号。
这些脉冲信号会以一定的重复频率被发射出去,然后在空间中传播。
当这些脉冲信号遇到目标时,会被目标反射回来,形成回波信号。
接着,雷达系统会接收这些回波信号,并进行信号处理。
在信号处理过程中,脉冲多普勒雷达会对接收到的回波信号进行时域和频域的分析。
通过时域分析,可以测量目标与雷达之间的距离,即目标的径向距离。
而通过频域分析,可以测量目标的速度。
这是因为目标的运动会导致回波信号的多普勒频移,通过测量多普勒频移的大小,可以计算出目标的速度信息。
除了距离和速度测量外,脉冲多普勒雷达还可以实现目标的探测和跟踪。
当目标被探测到后,雷达系统会不断地追踪目标,并根据目标的运动状态进行预测。
这样可以实现对目标的持续跟踪,从而满足实际应用中对目标监测的需求。
总的来说,脉冲多普勒雷达是一种能够实现目标距离和速度测量的雷达系统。
它通过发射脉冲信号、接收目标回波信号并进行信号处理,实现了对目标的探测和跟踪。
在实际应用中,脉冲多普勒雷达具有较高的测速精度和抗干扰能力,因此在军事、民用航空等领域有着广泛的应用前景。
多普勒雷达探测原理
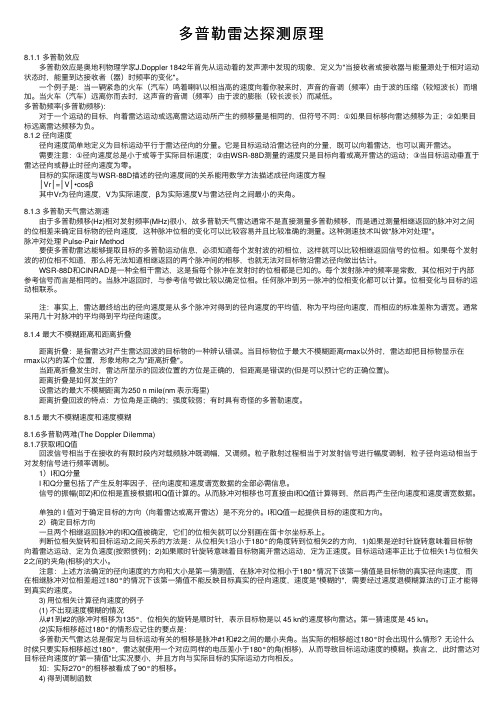
多普勒雷达探测原理8.1.1 多普勒效应多普勒效应是奥地利物理学家J.Doppler 1842年⾸先从运动着的发声源中发现的现象,定义为"当接收者或接收器与能量源处于相对运动状态时,能量到达接收者(器)时频率的变化"。
⼀个例⼦是:当⼀辆紧急的⽕车(汽车)鸣着喇叭以相当⾼的速度向着你驶来时,声⾳的⾳调(频率)由于波的压缩(较短波长)⽽增加。
当⽕车(汽车)远离你⽽去时,这声⾳的⾳调(频率)由于波的膨胀(较长波长)⽽减低。
多普勒频率(多普勒频移):对于⼀个运动的⽬标,向着雷达运动或远离雷达运动所产⽣的频移量是相同的,但符号不同:①如果⽬标移向雷达频移为正;②如果⽬标远离雷达频移为负。
8.1.2 径向速度径向速度简单地定义为⽬标运动平⾏于雷达径向的分量。
它是⽬标运动沿雷达径向的分量,既可以向着雷达,也可以离开雷达。
需要注意:①径向速度总是⼩于或等于实际⽬标速度;②由WSR-88D测量的速度只是⽬标向着或离开雷达的运动;③当⽬标运动垂直于雷达径向或静⽌时径向速度为零。
⽬标的实际速度与WSR-88D描述的径向速度间的关系能⽤数学⽅法描述成径向速度⽅程│Vr│=│V│•cosβ其中Vr为径向速度,V为实际速度,β为实际速度V与雷达径向之间最⼩的夹⾓。
8.1.3 多普勒天⽓雷达测速由于多普勒频移(Hz)相对发射频率(MHz)很⼩,故多普勒天⽓雷达通常不是直接测量多普勒频移,⽽是通过测量相继返回的脉冲对之间的位相差来确定⽬标物的径向速度,这种脉冲位相的变化可以⽐较容易并且⽐较准确的测量。
这种测速技术叫做"脉冲对处理"。
脉冲对处理 Pulse-Pair Method要使多普勒雷达能够提取⽬标的多普勒运动信息,必须知道每个发射波的初相位,这样就可以⽐较相继返回信号的位相。
如果每个发射波的初位相不知道,那么将⽆法知道相继返回的两个脉冲间的相移,也就⽆法对⽬标物沿雷达径向做出估计。
雷达多普勒原理
雷达多普勒原理
雷达多普勒原理是一种用于测量目标运动速度的技术。
它基于多普勒效应,即当天线向目标发送电磁波时,如果目标在运动,电磁波的频率会发生变化。
这种频率变化与目标的速度相关联。
具体而言,在雷达多普勒原理中,雷达系统首先向目标发送一束脉冲电磁波。
当这束电磁波与目标发生相互作用时,目标会对电磁波进行反射。
接收机会接收到反射回来的电磁波并分析它的频率。
如果目标静止不动,反射回来的电磁波的频率与发射时的频率相同。
但是,如果目标在运动,反射回来的电磁波的频率将会有所变化。
如果目标朝向雷达系统运动,反射回来的电磁波的频率将会增加。
相反,如果目标远离雷达系统运动,反射回来的电磁波的频率将减小。
通过测量反射回来的电磁波的频率变化,雷达系统可以计算出目标的运动速度。
这个频率变化与目标的速度成正比。
因此,通过测量这个频率变化,雷达系统可以非常准确地确定目标的运动速度。
雷达多普勒原理在许多应用中得到广泛使用。
例如,它可以用于航空领域中的空中交通管制,用于监测飞机或无人机的速度和运动方向。
此外,它还可以用于天气预报中,通过测量云层中的气流速度来预测风暴和气候变化。
总而言之,雷达多普勒原理基于多普勒效应,通过测量反射回
来的电磁波的频率变化来确定目标的运动速度。
它在许多应用领域中发挥着重要作用,并且是一种非常有效的测量技术。
多普勒雷达测速原理
多普勒雷达测速原理多普勒雷达是一种利用多普勒效应测量速度的无线电信号探测设备。
这种设备最早用于军事领域,用于测量飞机或导弹的速度和方向,现在也广泛应用于民用领域,如测量车辆、船只等的速度。
多普勒效应是一种物理现象,当射向运动物体的信号被反弹回来时,由于物体的运动会导致信号的频率发生变化。
具体来说,当物体向前运动时,信号的频率会变高,反之亦然。
这种变化的现象称为多普勒效应。
多普勒雷达使用这种效应来测量物体的速度。
多普勒雷达的工作原理是,向运动的物体发射一束电磁波,这个电磁波会反弹回来并被接收器接收。
接收器会检测到反弹回来的电磁波的频率,然后根据多普勒效应计算出物体的速度。
多普勒雷达的精度受到一些因素的影响,其中最明显的就是多普勒频移的大小。
这个频移的大小取决于物体的速度、雷达和物体之间的距离、以及电磁波的频率。
如果距离太远或者电磁波的频率太高,可能会导致多普勒频移过小,从而影响速度的测量精度。
另一个影响多普勒雷达精度的因素是多径效应。
当电磁波碰到物体后,它可能会反弹多次,导致接收器接收到多个信号。
这些信号可能会产生干扰,从而影响速度的测量精度。
为了解决这些问题,多普勒雷达通常会采用一些技术来提高测量精度。
可以使用更高精度的频率合成器来发射电磁波,或者使用数字信号处理技术来滤除多径效应。
除了测量速度,多普勒雷达还可以用于其他的应用,如测量距离、探测气象现象、探测海洋生物等。
测量距离是多普勒雷达最常见的应用之一。
它通过测量电磁波从雷达发射器到物体再返回到接收器的时间来计算距离。
多普勒雷达还可以用于探测气象现象,如暴风雨、雷暴等。
在这种情况下,雷达会发射电磁波,然后接收反弹回来的信号。
气象现象会导致反射信号的强度、频率和相位发生变化,从而使雷达可以识别出不同的气象现象。
多普勒雷达还可以用于探测海洋生物,如鱼类和海豚等。
在这种应用中,雷达会发射电磁波,然后监听反弹回来的信号。
当电磁波碰到鱼类或海豚等生物时,会反弹回来,产生一个信号。
相干多普勒测风激光雷达的工作原理
相干多普勒测风激光雷达的工作原理多普勒测风激光雷达是一种利用激光束进行风速测量的仪器。
它基于多普勒效应原理,通过测量激光回波的频率变化来获取风速信息。
在本文中,我将详细介绍多普勒测风激光雷达的工作原理。
多普勒效应是指当一个波源相对于观察者具有运动速度时,观察者会感觉到波的频率有所改变的现象。
根据多普勒效应,当一个物体靠近观察者时,波的频率会增加,而当物体远离观察者时,波的频率会减小。
多普勒测风激光雷达利用激光束发射器发射一束激光束向大气中传播。
当激光束与空气中的气溶胶粒子或颗粒物相互作用时,部分激光能量会被散射回到接收器。
接收器会接收到这些回波,并利用光电二极管将其转化为电信号。
在接收到回波信号之后,多普勒测风激光雷达会利用频谱分析的方法来解析这些信号,并提取出风速信息。
频谱分析是指将信号转化为频域表示的过程。
对于多普勒雷达来说,它会将接收到的回波信号转化为频谱表示,并通过分析频谱的峰值位置和宽度等参数来确定风速。
具体来说,多普勒测风激光雷达会通过比较接收到的激光回波信号与发射的激光信号的频率,来计算出频率差值。
这个频率差值与气体流动的速度成正比。
通过测量频率差值,多普勒测风激光雷达可以获取到风速信息。
在实际应用中,多普勒测风激光雷达可以被用于测量大气中的风速和风向。
它可以提供精确的风速测量,且对于气象、航空、环境等领域具有重要的应用价值。
总结起来,多普勒测风激光雷达的工作原理是基于多普勒效应。
它利用激光束与空气中的粒子进行相互作用,并通过测量激光回波信号的频率变化来获取风速信息。
多普勒测风激光雷达具有高精度、无需要涉及观测通量、有较长的测高范围等特点,因此被广泛应用于气象、航空、环境等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多普勒雷达工作原理
多普勒雷达是一种利用多普勒效应测量目标相对速度的雷达系统。
其工作原理基于多普勒效应,即当发射的电磁波与运动的目标相交时,电磁波的频率会发生变化。
多普勒雷达利用这种频率变化来计算目标的运动速度。
多普勒雷达包含一个发射器和一个接收器。
发射器发射出高频的电磁波,这些波经过天线发射出去,并与目标相交。
当电磁波与目标相交时,会发生频率的变化,这是由于目标的运动引起的。
接收器接收到目标反射回来的电磁波,并通过天线发送到接收器。
接收器会测量接收到的波的频率,并与发射时的频率进行比较。
根据频率的差异,可以计算出目标相对于雷达的速度。
为了提高测量的准确性,多普勒雷达通常会使用连续波或脉冲波进行测量。
连续波雷达通过持续地发射和接收电磁波来测量目标的速度。
脉冲波雷达则通过间歇性地发送短暂脉冲的电磁波来测量目标的速度。
除了测量速度,多普勒雷达还可以通过分析接收到的波的频谱来获得目标的运动方向和位置。
当目标接近雷达时,接收到的波的频率会增加,而当目标远离雷达时,接收到的波的频率会减小。
总之,多普勒雷达通过利用多普勒效应测量目标相对速度。
它
广泛应用于航空、气象、交通和军事等领域,可以提供有关目标速度和移动方向的重要信息。