自控复习题(答案)
自控复习题(答案)

复习题一、 填空题1、典型二阶振荡环节,当0<ξ<0.707时,谐振频率m ω与自然频率n ω 的关系是 ;2、反馈控制系统是根据给定值和__________的偏差进行调节的控制系统;3、对自动控制系统的基本要求是 、 、 ;4、负反馈根轨迹起始于 ;5、当开环增益一定时,采样周期越 ,采样系统稳定性越 ;6、串联校正装置可分为超前校正、滞后校正和__________;7、理想继电特性的描述函数是 ;9、对数幅频渐近特性在低频段是一条斜率为-20dB /dec 的直线,则系统存在 个积分环节。
10、串联超前校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,是 。
11、对1800根轨迹,始于 。
12、当开环增益一定时,采样周期越大,采样系统稳定性越 ; 13、传递函数的定义是 。
14、二阶线性控制系统的特征多项式的系数大于零是稳定的 条件。
15、要求系统快速性和稳定性好,则闭环极点应在 附近。
16、比例微分环节G(s)=1+T s 的相频特性为)(ωA =_______________。
17、线性定常系统的稳态速位置误差系数定义为 ; 18、比例微分环节G(s)=1+T s 的幅频特性为)(ωA =_______________。
19、对数幅频渐近特性在低频段是一条斜率为-40dB /dec 的直线,则系统有 个积分环节存在。
20、串联滞后校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,是 。
21、对1800根轨迹,实轴上根轨迹段右边开环零极点数之和应为 。
22、当采样周期一定时,加大开环增益会使离散系统的稳定性变 。
27、线性定常系统的稳态速度误差系数定义为 ;28、零阶保持器的传递函数是29、线性定常系统的稳态误差与 和 有关; 31、对自动控制系统的基本要求是 、 、 ; 32、要求系统快速性好,则闭环极点应距虚轴较 ;33、当采样周期一定时,加大开环增益会使离散系统的稳定性变 ;34、无纹波最少拍系统比有纹波最少拍系统所增加的拍数是 ; 35、实轴上根轨迹段右边开环零极点数之和应为36、线性定常系统的稳态误差与 、 有关 37、在伯德图中反映系统动态特性的是 ;38、对于欠阻尼的二阶系统,当阻尼比ξ 则超调量 。
自动控制原理填空题复习(答案仅供参考)
自动1. 对于一个自动控制的性能要求可以概括为三个方面: 稳定性 、 快速性 、 准确性 。
2. 反馈控制系统的工作原理是按 偏差 进行控制,控制作用使 偏差 消除或减小,保证系统的输出量按给定输入的要求变化。
3. 系统的传递函数只与系统 本身 有关,而与系统的输入无关。
4. 自动控制系统按控制方式分,基本控制方式有:开环控制系统 、 闭环控制系统 、混合控制系统 三种。
5. 传递函数G(S)的拉氏反变换是系统的单位 阶跃 响应。
6. 线性连续系统的数学模型有 电机转速自动控制系统。
7. ★系统开环频率特性的低频段,主要是由 惯性 环节和 一阶微分 环节来确定。
8. 稳定系统的开环幅相频率特性靠近(-1,j0)点的程度表征了系统的相对稳定性,它距离(-1,j0)点越 远 ,闭环系统相对稳定性就越高。
9. 频域的相对稳定性常用 相角裕度 和 幅值裕度 表示,工程上常用这里两个量来估算系统的时域性能指标。
10. 某单位反馈系统的开环传递函数2()(5)G S s s =+,则其开环频率特性是2-2.0tan -)(1πωωϕ-= ,开环幅频特性是424252)(A ωωω+=,开环对数频率特性曲线的转折频率为 。
11. 单位负反馈系统开环传递函数为2()(5)G S s s =+,在输入信号r(t)=sint 作用下,,系统的稳态输出c ss (t)= , 系统的稳态误差e ss (t)= .12. 开环系统的频率特性与闭环系统的时间响应有关。
开环系统的低频段表征闭环系统的 稳定性 ;开环系统的中频段表征闭环系统的 动态性能 ;开环系统的高频段表征闭环系统的 抗干扰能力 。
自动控制原理填空题复习(二)1、反馈控制又称偏差控制,其控制作用是通过 输入量 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 参考输入 的前馈复合控制和按 扰动 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G 1(s)+G 2(s) (用G 1(s)与G 2(s) 表示)。
电力拖动自动控制系统复习题及答案

电力拖动自动控制系统复习题及答案一、基础题1、反馈控制系统的作用是:抵抗扰动,服从给定。
2、带比例放大器的反馈控制闭环调速系统是有静差的调速系统,采用比例积分(PI)调节器的闭环调速系统是无静差的调速系统。
3、实际上运算放大器的开环放大系数并不是无穷大,特别是为了避免零点飘移而采用准IP调节器。
4、对于调速系统,最重要的动态性能是抗扰性能,主要是抗负载扰动和抗电网电压扰动的性能。
5、调速系统的动态指标以抗扰性能为主,而随动系统的动态指标则以动态跟随性能为主。
6、超调量的表达式为:δ=(Cmax-C∞)/C∞×100%。
7、在基频以下,磁通恒定时转矩也恒定,属于恒转矩调速性质,而在基频以上,转速升高时转矩降低,属于恒功率调速。
8、当电动机由三相平衡正弦电压供电时,磁链幅值一定时,u S 的大小与电压角频率δ1 成正比,其方向则与磁链矢量正交。
9、调速系统的动态性能就是抵抗扰动的能力。
10、抗扰性能是反馈控制系统最突出的特征之一。
11、转速反馈闭环调速系统的精度信赖于给定和反馈检测精度。
12、比例调节器的输出只取决于输入偏差量的现状;而积分调节器的输出则包含了输入偏差量的全部历史。
13、在起动过程中转速调节器ASR经历了快速进入饱和、饱和、退饱和、三种情况。
14、自动控制系统的动态性能指标包括:跟随性能指标和扰动性能指标。
15、动态降落的表达式为:(△Cmax/Cb) ×100%。
16、基频以上变频调速属于恒功率调速。
17、异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
18、两种最基本的直流调速方式为:调压调速方式和弱磁调速方式。
19、在典型II型系统性能指标和参数的关系分析中,引入了h,h 是斜率为–20dB/dec的中频段的宽度,称作中频宽。
20、Ws*+W =W1* 是转差频率控制系统突出的特点或优点。
21、异步电机的数学模型由电压方程、磁链方程、转矩方程和运动方程组成。
《自控理论》期末考试复习题及答案
N(S)
R(S)
1/S
-
1/(S+1)
C(S)
1
G(S) 10
十二已知开环传递函数为
S(S 4) , 若 输 入 信 号 为
求稳态误差。
十三 简述开环控制和闭环控制的含义,并分别说出其特点。
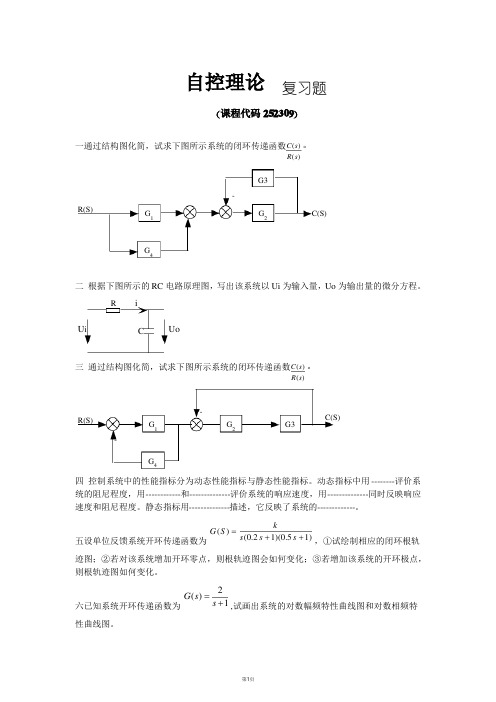
十四 已知控制系统结构图如下图所示,试求系统传递函数C(S) 。 R(S)
r(t)=4+6t+3t2,
H1(S)
R(S)
-
G1(S)
G2(S)
C(S)
G3(S)
十五 已知系统的闭环特征方程为 3S4+10S3+5S2+S+2=0,试用劳斯判据分析系统的稳定性。
若系统不稳定,指出不稳定根的个数。
十六 求出下图所示系统的开环和闭环传递函数。
R(s)
C(S)
K
1
-
0.05s 1
s
十七 设单位反馈系统开环传递函数为 G(S)
系统不稳定,指出不稳定根的个数。 8 已知系统开环传递函数为 G(s) 10 ,试画出系统的对数幅频特性曲线图和对数相频特
2s 1
性曲线图。
9 设单位反馈控制系统的开环传递函数为G(S)
2K
,试绘制根轨迹。
S(S 1)(S 2)
参考答案
C(s) (G G )G
1
1
42
R(s) 1 G G
23
性曲线图。
第1页
七简述奈氏稳定判据。 八自动控制系统从控制的基本方式看可分为哪三种控制?并分别介绍每种控制。
九已知一单位反馈系统的开环传递函数为G(s)
25 s(s 6)
,试计算其动态性能指标(σ%,tp
自动控制原理期末复习题答案

期末复习题概念题一、填空题1、把输出量直接或间接地反馈到输入端,形成闭环参和控制的系统,称作 闭环控制系统 。
2、传递函数反映系统本身的瞬态特性,和本身参数和结构 有关 ,和输入和初始条件无关 。
3、最大超调量只决定于阻尼比ξ,ξ越小,最大超调量越 小 。
4、已知系统频率特性为151+ωj ,当输入为t t x 2sin )(=时,系统的稳态输出为110)101t tg --。
5、校正装置的传递函数为TsaTss G c ++=11)(,系数a 大于1,则该校正装置为 超前 校正装置。
6、如果max ω为)(t f 函数有效频谱的最高频率,那么采样频率s ω满足条件max 2s ωω≥ 时,采样函数)(*t f 能无失真地恢复到原来的连续函数)(t f 。
二、 单选题1、闭环控制系统的控制方式为 D 。
A. 按输入信号控制 B. 按扰动信号控制 C. 按反馈信号控制 D. 按偏差信号控制2、某一系统在单位速度输入时稳态误差为零,则该系统的开环传递函数可能是 D 。
A.1+Ts K B. ))((b s a s s d s +++ C. )(a s s K + D. )(2a s s K+3、已知单位反馈系统的开环奈氏图如图所示,其开环右半S 平面极点数P=0,系统型号1v =,则系统 A 。
1-jA.稳定B.不稳定C.临界稳定D. 稳定性不能确定4、串联滞后校正是利用 B ,使得系统截止频率下降,从而获得足够的相角裕度。
A . 校正装置本身的超前相角B .校正装置本身的高频幅值衰减特性C .校正装置本身的超前相角和高频幅值衰减D .校正装置富裕的稳态性能 5、设离散系统闭环极点为i i i z j σω=+,则 C 。
A .当0i ω=时,其对应的阶跃响应是单调的;B .当0i σ<时,其对应的阶跃响应是收敛的;C 221i i σω+<时,其对应的阶跃响应是收敛的;D .当0i ω=时,其对应的阶跃响应是等幅振荡。
自动控制工程基础复习题及答案

一、单项选择题:1. 线性系统和非线性系统的根本区别在于 ( C )A .线性系统有外加输入,非线性系统无外加输入。
B .线性系统无外加输入,非线性系统有外加输入.C .线性系统满足迭加原理,非线性系统不满足迭加原理。
D .线性系统不满足迭加原理,非线性系统满足迭加原理。
2.令线性定常系统传递函数的分母多项式为零,则可得到系统的 ( B )A .代数方程B .特征方程C .差分方程D .状态方程 3. 时域分析法研究自动控制系统时最常用的典型输入信号是 ( D )A .脉冲函数B .斜坡函数C .抛物线函数D .阶跃函数4.设控制系统的开环传递函数为G (s)=)2s )(1s (s 10++,该系统为 ( B )A .0型系统B .I 型系统C .II 型系统D .III 型系统5.二阶振荡环节的相频特性)(ωθ,当∞→ω时,其相位移)(∞θ为 ( B )A .—270°B .—180°C .—90°D .0°6. 根据输入量变化的规律分类,控制系统可分为 ( A )A.恒值控制系统、随动控制系统和程序控制系统B 。
反馈控制系统、前馈控制系统前馈—反馈复合控制系统 C.最优控制系统和模糊控制系统 D.连续控制系统和离散控制系统7.采用负反馈连接时,如前向通道的传递函数为G (s ),反馈通道的传递函数为H (s ),则其等效传递函数为 ( C )A .)s (G 1)s (G + B .)s (H )s (G 11+C .)s (H )s (G 1)s (G +D .)s (H )s (G 1)s (G -8. 一阶系统G (s )=1+Ts K的时间常数T 越大,则系统的输出响应达到稳态值的时间 ( A )A .越长B .越短C .不变D .不定9.拉氏变换将时间函数变换成 ( D )A .正弦函数B .单位阶跃函数C .单位脉冲函数D .复变函数10.线性定常系统的传递函数,是在零初始条件下 ( D )A .系统输出信号与输入信号之比B .系统输入信号与输出信号之比C .系统输入信号的拉氏变换与输出信号的拉氏变换之比D .系统输出信号的拉氏变换与输入信号的拉氏变换之比 11.若某系统的传递函数为G(s )=1Ts K+,则其频率特性的实部R (ω)是 ( A ) A .22T 1Kω+B .-22T 1Kω+C .T1K ω+D .—T1Kω+12。
自动控制原理复习练习题
自动控制原理复习练习题4、根据控制系统传输信号的性质分类,控制系统可分为( )A. 恒值控制系统、随动控制系统和程序控制系统B. 反馈控制系统、前馈控制系统、前馈一反馈控制系统C. 最优控制系统和模糊控制系统D.连续控制系统和离散控制系统5、系统的动态性能包括()一、选择题1•下图所示的图 _______ 是闭环控制系统R(S)1NC(S)----------------- AG(S)---►G 2(S)■(A)给定值1扰动■被控量---■ 控制器' --受控对象(C)2.下图所示函数曲线中,_是阶跃函数。
f(t) R(A) 3、控制系统的输入参考量是一个常值时, (C)我们一般称它为(D)( )(A)恒值控制系统 (B)随动系统(C)程序控制系统( )检测元件(B)(D)f(t)t(t)(B)A 稳定性、平稳性 B.快速性、稳定性C.平稳性、快速性 D .稳定性、准确性6系统的传递函数()。
A. 与输入信号有关B. 与输出信号有关C .完全由系统的结构和参数决定D. 既由系统的结构和参数决定,也与输入信号有关 7、 运算放大器具有的优点是()。
A .输入阻抗高,输出阻抗低B .输入阻抗低,输出阻抗高C.输入、输出阻抗都高 D .输入、输出阻抗都低8、 在自动控制理论中,数学模型有多种形式,属于时域中常用的数学模型的是( )。
9、对图示结构图简化正确的是(快。
A. 输入信号的幅度越小,积分时间常数越小B. 输入信号的幅度越小,积分时间常数越大A .微分方程B .传递函数C .结构图D .频率特性I ------- 1 I -------- 1 C叫T G2(S ) G(S )~►R *1G 2(S )G 2(SG I (S ) C_■1(D )),则积分环节的输出信号的上升速度越(B)C. 输入信号的幅度越大,积分时间常数越小D. 输入信号的幅度越大,积分时间常数越大11、一阶系统的阶跃响应()A.当时间常数T较大时有超调 B .当时间常数T较小时有超调C .有超调D .无超调12、对于欠阻尼的二阶系统,当无阻尼自然振荡角频率n保持不变时,()A .阻尼比越大,系统调节时间t s越大B.阻尼比越大,系统调节时间t s越小C .阻尼比越大,系统调节时间ts不变D.阻尼比越大,系统调节时间ts不定13、劳斯稳定判据和赫尔维茨判据形式不同,实际结论()A.也不同B. 有时相同C.基本相同D. 却是相同的14、二阶系统特征方程的系数均大于零,这表明该系统是的。
《自动控制理论》(高起专)课程知识 复习 学习材料 试题与参考答案

《自动控制理论》(高起专) 课程知识 复习 学习材料 试题与参考答案一、单项选择题(本大题共10小题,每小题2分,共20分)1.开环对数频率特性沿ω轴向左平移时 (B )A .c ω减少,γ增加 B. c ω减少,γ不变 C. c ω增加,γ不变 D. c ω不变,γ也不变2.某0型单位反馈系统的开环增益为K ,则在2()1/2r t t =输入下,系统的稳态误差为 (B )A .0 B. ∞ C. 1/K D. */A K3.单位反馈系统的开环传递函数()G s =,其幅值裕度h 等于 (D )A .0 B. dB C. 16dB D. ∞ 4.欠阻尼二阶系统的,n ξω,都与 (C )A .%σ有关 B. %σ无关 C. p t 有关 D. p t 无关5.两典型二阶系统的超调量%σ相等,则此两系统具有相同的 (B ) A .自然频率n ω B. 相角裕度γ C .阻尼振荡频率d ω D. 开环增益K6.最小相角系统闭环稳定的充要条件是 (A )A .奈奎斯特曲线不包围(-1,j0)点 B. 奈奎斯特曲线包围(-1,j0)点 C .奈奎斯特曲线顺时针包围(-1,j0)点 D. 奈奎斯特曲线逆包围(-1,j0)点 7.典型二阶系统,当0.707ξ=时,无阻尼自然频率n ω与谐振频率r ω之间的关系为 (B ) A .r n ωω> B. r n ωω<C .r n ωω≥ D. r n ωω≤ 8. 已知串联校正装置的传递函数为0.2(5)10s s ++,则它是 (C )A .相位迟后校正 B. 迟后超前校正 C .相位超前校正 D. A 、B 、C 都不是9. 二阶系统的闭环增益加大 (D )A .快速性越好 B. 超调量越大 C. 峰值时间提前 D. 对动态性能无影响10.系统的频率特性 (A )A .是频率的函数 B. 与输入幅值有关 C .与输出有关 D. 与时间t 有关 11、两典型二阶系统的超调量%σ相等,则此两系统具有相同的 (B ) A .自然频率n ω B. 相角裕度γC .阻尼振荡频率d ω D. 开环增益K 12、单位反馈系统的开环传递函数()G s =h 等于 ( D )A .0 B. dB C. 16dB D. ∞13、 已知串联校正装置的传递函数为0.2(5)10s s ++,则它是 ( C )A .相位迟后校正 B. 迟后超前校正 C .相位超前校正 D. A 、B 、C 都不是 14、开环系统Bode 图如图所示,对应的开环传递函数()G s 应该是 ( A )A .2111s sωω-+ B.2111ssωω+-C.1211s sωω-+ D.2111ssωω--15、单位反馈最小相角系统的开环对数频率特性如图所示,要用串联校正方式使校正后系统满足条件*4c ω≥,*050γ≥,则应采用 ( C )A .超前校正 B. 迟后校正C .迟后超前校正 D. 用串联校正方式不可能满足校正要求 16、典型二阶系统的超调量越大,反映出系统 (D ) A .频率特性的谐振峰值越小 B. 阻尼比越大 C .闭环增益越大 D. 相角裕度越小 17、系统的频率特性 ( A )A .是频率的函数 B. 与输入幅值有关 C .与输出有关 D. 与时间t 有关 18、典型欠阻尼二阶系统,当开环增益K 增加时,系统 (B )A .阻尼比ξ增大,超调量%σ增大 B. 阻尼比ξ减小,超调量%σ增大 C .阻尼比ξ增大,超调量减小 D. 无阻尼自然频率n ω减小19、下图是控制导弹发射架方位的电位器式随动系统原理图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
复习题一、 填空题1、典型二阶振荡环节,当0<ξ<0.707时,谐振频率m ω与自然频率n ω 的关系是 ;2、反馈控制系统是根据给定值和__________的偏差进行调节的控制系统;3、对自动控制系统的基本要求是 、 、 ;4、负反馈根轨迹起始于 ;5、当开环增益一定时,采样周期越 ,采样系统稳定性越 ;6、串联校正装置可分为超前校正、滞后校正和__________;7、理想继电特性的描述函数是 ;9、对数幅频渐近特性在低频段是一条斜率为-20dB /dec 的直线,则系统存在 个积分环节。
10、串联超前校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,是 。
11、对1800根轨迹,始于 。
12、当开环增益一定时,采样周期越大,采样系统稳定性越 ; 13、传递函数的定义是 。
14、二阶线性控制系统的特征多项式的系数大于零是稳定的 条件。
15、要求系统快速性和稳定性好,则闭环极点应在 附近。
16、比例微分环节G(s)=1+T s 的相频特性为)(ωA =_______________。
17、线性定常系统的稳态速位置误差系数定义为 ; 18、比例微分环节G(s)=1+T s 的幅频特性为)(ωA =_______________。
19、对数幅频渐近特性在低频段是一条斜率为-40dB /dec 的直线,则系统有 个积分环节存在。
20、串联滞后校正后,校正前的穿越频率ωC 与校正后的穿越频率C ω'的关系,是 。
21、对1800根轨迹,实轴上根轨迹段右边开环零极点数之和应为 。
22、当采样周期一定时,加大开环增益会使离散系统的稳定性变 。
27、线性定常系统的稳态速度误差系数定义为 ;28、零阶保持器的传递函数是29、线性定常系统的稳态误差与 和 有关; 31、对自动控制系统的基本要求是 、 、 ; 32、要求系统快速性好,则闭环极点应距虚轴较 ;33、当采样周期一定时,加大开环增益会使离散系统的稳定性变 ;34、无纹波最少拍系统比有纹波最少拍系统所增加的拍数是 ;35、实轴上根轨迹段右边开环零极点数之和应为36、线性定常系统的稳态误差与 、 有关 37、在伯德图中反映系统动态特性的是 ;38、对于欠阻尼的二阶系统,当阻尼比ξ 则超调量 。
39、线性定常系统的稳定的必要条件是 40、系统根轨迹方程式为41、单位负反馈系统的开环传函为G(s),其闭环传函为 ; 简答5.某负反馈系统开环传函为G(s)=K/(-Ts+1),作奈氏图,讨论其稳定性。
系统的p=1,z=1,系统不稳定。
二、计算1、已知系统结构如图示:①a = 0 时,确定系统的阻尼比ξ、自然频率ωn 和单位阶跃作用下系统输出表式,超调量σ%及稳态误差e ss 。
②当要求系统具有最佳阻尼比时确定参数a 值及单位斜坡函数输入时系统的稳态误差e ss 。
① )2()2(82n n s s s s ζωω+=+ 所以: 22=n ω, 42=ξ )6965.2sin(07.11)sin(111)(02+-=+--=--t e t e t h t d t n βωξξω)2(8+s s as- - R(s) E(s) C(s)- -21%ξξπσ--=e=30.6% e ss =0②)2()82(8)2(81)2(8)(2n n s s a s s s s as s s s G ξωω+=++=+++= ⎩⎨⎧==25.022a n ω 2.某负反馈系统,开环传函为)15.0)(1(5.0)(++=s s s Ks G ,试作出系统的根轨迹,并求1)系统阻尼比ξ=0.5的主导极点时的K 值,并估算σ%、t s 。
2)临界稳定时的K 值。
1). ①系统三个开环极点:p 1=0,p 2=-1,p 3=-2,无有限零点,有三条根轨迹,起于0,-1,-2,终于无穷远处;渐近线方程:⎩⎨⎧-=±=1,3/a a σππϕ;实轴上根轨迹为:[0,-1],[-2,-∞);分离点d :012111=++++dd d ;得:d=-0.42;与虚轴的交点:由特征方程: S 3+3s 2+2s+K=0,将s=j ω代入,得:K=6,2±=ω;得根轨迹如下: ②:时的阻尼线5.0=ξ060=β,它与根轨迹的交点为:58.033.0j j s ±-=±=ωσ 第三个极点为:3321321-=++=++p p p s s s 得:s 3=-2.34 所以将s 1 t 和s 2445.0667.0445.0))(()(22121++=--=Φs s s s s s s s s 系统的5.0=ξ;667.0=n ω所以有:%3.16%21/==--ξξπσe0.93==ns t ξωs2)、解:系统开环极点为:p 1=0,p 2=-1,p 3=-2 为根轨迹起点,三条根轨迹到无穷远处。
渐近线为:⎩⎨⎧±=-=060,1801a a ϕσ系统特征方程为:02323=++K s s s将s=j ω代入,得:ω=2时,临界的K=6,所以系统在60<<K 时稳定3、已知最小相位开环系统的渐近对数幅频特性如题图所示,试求该系统的开环传递函数G(s);估算相角裕量说明是否稳定;说明系统右移十倍频程时系统是否稳定。
(a) (b) (a)解:由图可知:系统的传函为:)140)(1()12(20)(+++=ss s s s G 036.7025.010905180=---+=c c c arctg arctg arctg ωωωγ系统稳定。
(b)由图可知:系统的传函为:)140)(1()12(20)(+++=ss s s s G 036.7025.010905180=---+=c c c arctg arctg arctg ωωωγ系统稳定。
(c) (d) (c)、解:由图可知:系统的传函为:)140)(1()12(20)(+++=ss s s s G 036.7025.010905180=---+=c c c arctg arctg arctg ωωωγ系统稳定。
(d))125.0)(110()15(2)(+++=S S S S s G036.7025.010905180=---+=ωωωγarctg arctg arctg(e) (f)(e)由图可写出系统的传函为:11101)(2++=s s s K s G ,由图可得出1110111⨯**=K得:K=0.1,所以:)1()110(1.0)(2++=s s s s G(f)解:)101.0()110(11001)110(1)(++=+⋅+⋅⋅=s s s k s s s ks G 而由图可知:1010101⨯⋅=K ,所以:1.0=K所以:)101.0()110(1.0)(++=s s s s G(没找到)4、设离散系统如图示,试问:1)当T=0.1s 时,系统是否稳定。
2)当r(t)为单位阶跃信号时,试计算稳态误差e(∞)及系统的输出C (Z )。
ω L(5、已知系统结构如图示: 1)要使ξ=0.5,ωn =5则K t ,K1为多少?并求阶跃作用下系统输出表式和超调量σ% 。
2)保持K 1不变,当要求系统具有最佳阻尼比时确定K t 值及求单位斜坡函数输入时系统的稳态误 差e ss 。
解:1)系统开环传函为:)258.0(25)(1t o K s s K s G ++=与标准式比较,得:⎩⎨⎧+====t N n K K 258.052252512ξωω,得:⎩⎨⎧==168.011t K K 系统阶跃响应:)6033.4sin(155.11)1sin(11)()(05.222+-=+---==--t e t e t h t c t n t n βξωξξω超调量:%3.16%21==--ξξπσe2)由标准式比较得:⎩⎨⎧+====t N n K K 258.0252252512ξωω得⎩⎨⎧==251.011t K K 由于系统为阶系统,系数大于零,满足稳定的条件,所以:283.025258.011=+==K K K e tss6、某反馈控制系统如图所示(K>0): (1)绘制奈奎斯特图;(2)试讨论系统的稳定的稳定性。
)8.0(25+s s K t s R(s) E(s) C(s) -- K 1 s s K )2(1+ - -R(s) C(s) )1(10+s s7、设离散系统如图示,其中采样周期,试问:1)当T=1s 时,r(t)=1+t,试求静态速度误差系数及稳态误差e(∞)。
解:系统开环脉冲传函为: ))(1()1()1(11)(11T T e z z z e z z z G -------•-•-= 闭环特征方程为:0368.0736.02)(22=+-=+-=--z z e z e z z D T T ,闭环极点为:482.0368.02,1j z ±=要单位圆内,系统稳定,则静态位置误差系数为:∞=p K ;静态速度误差系数为:11)()1lim(→=-=z v z G z K ;所以稳态误差为:1/==K T e ss8、采样系统如图示,其中采样周期T=1s, 当输入为单位斜坡输入时,求系统的稳 态误差 e (∞)。
解:系统开环脉冲传函为: ))(1()1()1(11)(11T T e z z z e z z z G -------•-•-= 闭环特征方程为:0368.0736.02)(22=+-=+-=--z z e z e z z D T T ,闭环极点为:482.0368.02,1j z ±=要单位圆内,系统稳定,则静态位置误差系数为:∞=p K ;静态速度误差系数为:11)()1lim(→=-=z v z G z K ;所以稳态误差为:1/==K T e ss(没找到)9.某负反馈系统,开环传函为)5)(2()(++=s s s Ks G ,试作出系统的根轨迹,并求1)系统主导极点为最佳阻尼比时的K 值,并估算σ%、t s 。
2)当取K=2时,求:()1r t t =+时,系统的稳态误差e ss10、系统方框图如下,用两种方法求出传递函数)S (R )S (C 。
解:1)系统开环传函为:)258.0(251t o K s s K ++=⎩⎨⎧+====t N n K K 258.052252512ξωω,得:⎩⎨⎧==168.011t K K 系统阶跃响应:)6033.4sin(155.11)1sin(11)()(05.222+-=+---==--t e t e t h t c t n t n βξωξξω超调量:%3.16%21==--ξξπσe11、图示系统,画出动态结构图,并求传函。