坐标反算里程
关于坐标反算里程的超常规方法
关于坐标反算里程的超常规方法
(仅适用于隧道工程)
对于曲线隧道超开挖线放样测量,大家都觉得用坐标反算里程时计算的时间长,有的可能在三秒以内,有的可能会超过五秒钟,那让人期待的滋味的确让人难以忍受,如果不慎把坐标数据输入错误,更会让人抓狂(呵呵,因为必须得输正确坐标数据,错了要返工.),这样的无奈我也深有感触啊.有没有什么好方法让计算时间缩短呢?肯定有,下面我会详细介绍.
不管什么样式的曲线,它在某些情况下是可以看成直线的,(比如说 1.5米,2米这样的曲线线段),我说的这种方法就是把曲线当成直线来计算,这样就少去了很多计算步骤,而且能直接计算出结果.在现实施工中,我们的开挖面都是倾斜的,这个倾斜面就存在一个里程差,我们就可以把这个里程差当做直线来计算,我们只需取两个点就可以了,一个是凹进去最深的点,一个是最突出的点,我们架设好仪器后就先测算出这两点的里程,然后就把我们计算范围界定在这两个里程之间,把这两个里程点之间的当着一条直线,而且这条直线一般都很短,很少有超过2米的,然后我们在放开挖线的时候测出来的坐标都通过这条直线来反算它对应的真实里程,计算出测量点的偏移值.
接下来我们再说说精度的问题,我曾在CAD中画过这样的图,里程差取2米,半径取值为50米.隧道半幅宽度按8米计算,垂直于这条直线的距离和半径方向的距离误差也就只有0.0077米,半径50米2米长的弧线外矢距也就0.01米(现实中设计的曲线半径很少有小于50米的),完全能满足要求.且我们实际的开挖尺寸也是按直线掘进的,进尺完全大于我们所取的这两个里程差.所以这个误差完全是可以忽略不记的.
以上这种方法,我已经在实际当中用过,真的不错哟.希望同行们留意,也许能对你有所帮助,本人QQ468076885,欢迎同行灌水.。
浅谈用切线迭代法反算坐标里程

强烈 。 同时 , 论在压 密 路基 、 不 上部 路基 、 下部 路基 底部 节
【l 波 , 英 , 东 生 . 一路 垂 向耦 合 系 统 的动 力 分 析 【 . 道 5梁 蔡 朱 车 J铁 】
2 0 2 () — . 6 点 处 的加 速度 时 程 分析 曲线 波 动和 线 性 变化 趋 势 基 本一 学报 , 0 0, 2 1:5 71
【】 强 . 速 铁 路 路 桥 过 渡 段 动 力 学特 性 分析 及 工 程 试 验 研 究 6罗 高 致 , 们 的曲线形 式具 有较 好的 吻合性。 他 【 】 都 : 南 交 通 大 学 ,0 3 D. 成 西 20 . 3 结语 【】 谦 . 速 铁 路 路 基 空 闻 时 变耦 合 系统 动 力 分 析 模 璎 及 其 应 7苏 高 通过 前 述 分析 , 以得 到 如 下 认 识 : 速 度 时 程 曲线 可 加 用研 究【 . 都: 南 交通 大学 , 0 1 D1 成 西 20. 对于 越 处于路 基上 层 的土体 波动 越 大 ,波 动 幅度越 强 烈。 [】 谦 , 英 . 速 铁 路 路 基 结 构 空 间 时 变 系 统 耦 合 动 力 分 析 8苏 蔡 高 加速 度 时程 分析 曲线波 动和 线性 变化 趋势 基本 一致 , 有 [] 具 J. 西南 交 通 大 学 学报 ,0 1 3 () 0 — 1 . 2 0 ,65: 9 5 3 5 较好 的 吻合性。 【】 志 红 . 速 铁 路 轨 道 路 基 竖 向 动 力 响应 研 究 I ] 沙 : 南 9聂 高 D. 长 中
【2边 学 成 , 云 敏 于 2 5维 有 限 元 方 法 分析 列 车 荷 载 产 生 1】 陈 基 .
gou irt n n u e y hgh p e ris a e s a r [] 分析 【 _ 动 与 冲 击 , 0 7 2 () 4 6 r d vba i s id c d b i -s e d tan t L d g adJ . o J振 】 2 0 ,63: — 7 6
线路上点坐标反算其里程桩号及中桩距
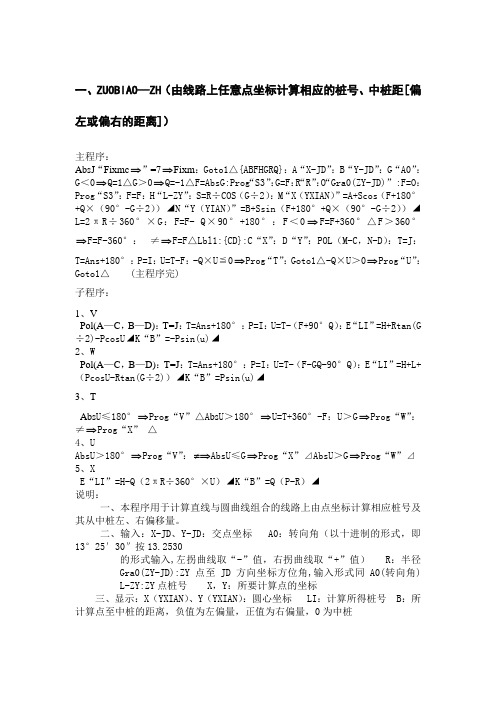
一、ZUOBIAO—ZH(由线路上任意点坐标计算相应的桩号、中桩距[偏左或偏右的距离])主程序:AbsJ“Fixmc⇒”=7⇒Fixm:Goto1△{ABFHGRQ}:A“X-JD”:B“Y-JD”:G“A0”:G<0⇒Q=1△G>0⇒Q=-1△F=AbsG:Prog“S3”:G=F:R“R”:O“Gra0(ZY-JD)”:F=O:Prog“S3”:F=F:H“L-ZY”:S=R÷COS(G÷2):M“X(YXIAN)”=A+Scos(F+180°+Q×(90°-G÷2))◢N“Y(YIAN)”=B+Ssin(F+180°+Q×(90°-G÷2))◢L=2πR÷360°×G:F=F- Q×90°+180°:F<0⇒F=F+360°△F>360°⇒F=F-360°:≠⇒F=F△Lbl1:{CD}:C“X”:D“Y”:POL(M-C,N-D):T=J:T=Ans+180°:P=I:U=T-F:-Q×U≦0⇒Prog“T”:Goto1△-Q×U>0⇒Prog“U”:Goto1△ (主程序完)子程序:1、VPol(A—C,B—D):T=J:T=Ans+180°:P=I:U=T-(F+90°Q):E“LI”=H+Rtan(G ÷2)-PcosU◢K“B”=-Psin(u)◢2、WPol(A—C,B—D):T=J:T=Ans+180°:P=I:U=T-(F-GQ-90°Q):E“LI”=H+L+(PcosU-Rtan(G÷2))◢K“B”=Psin(u)◢3、TAbs U≤180°⇒Prog“V”△A bs U>180°⇒U=T+360°-F:U>G⇒Prog“W”:≠⇒Prog“X”△4、UAbsU>180°⇒Prog“V”:≠⇒AbsU≤G⇒Prog“X”⊿AbsU>G⇒Prog“W”⊿5、XE“LI”=H-Q(2πR÷360°×U)◢K“B”=Q(P-R)◢说明:一、本程序用于计算直线与圆曲线组合的线路上由点坐标计算相应桩号及其从中桩左、右偏移量。
由坐标反算出路线里程桩号在工程测量中的应用

由坐标反算出路线里程桩号在工程测量中的应用摘要:文章系统地介绍了由已知坐标,反向推算出该坐标位于公路路线的里程桩号及距中距离的基本概念和方法,重点介绍利用卡西欧fx-4800计算器编程,由已知坐标反向推算出公路路线中常见的直线段、圆曲线段的里程桩号方法及其在工程测量中的应用,对缩短工程测量时间,提高测量效率起到重要作用。
关键词:坐标反向推算;公路路线里程;编程;工程测量;引言在公路施工测量中,我们常用的测设方法是通过设计文件、图纸中的直线、曲线及转角表,来计算出路线的中桩、边桩坐标,再利用全站仪的放样功能,将中桩及边桩坐标在实地位置测定出来。
那么我们能不能由某一已知坐标,通过卡西欧fx-4800计算器编程计算,就能知道该坐标的准确的路线里程桩号以及其距中线的距离,甚至其设计高程,这对我们提高施工测量的效率有很大的帮助。
本文将阐述由已知坐标反向推算出公路路线中较为常见的直线段、圆曲线段里程桩号的基本概念和方法,以及介绍利用卡西欧fx-4800计算器编程,快速反算出已知坐标的里程桩号及距中距离。
1 直线段坐标反向推算路线里程桩号如图1,设直线段路线起始点O的里程桩号为K1,中桩平面坐标为(X0,Y0),路线方位角为α,P点平面坐标为(X,Y),求出P点位于该直线段的里程桩号,以及距中距离,计算步骤为:①计算直线起点O至P点的直线距离,计算公式为:②反算直线起点O至P点的坐标方位角,计算公式为:③计算直线0P与路线的夹角,计算公式为:④计算P点垂直投影于路线的垂直距离,即P点到路线中心的距离,计算公式为⑤计算P点的里程桩号,计算公式为:图1从图1中,可以看出P点的里程桩号由P点垂直投影于路线的P1点与直线起始点O之间的直线距离,与O点里程K0+000相加后,即为P点的里程桩号,L=Dsinβ即为P点位于路线右侧的距中距离,数值为正值;如果P点位于路线左侧,L=Dsinβ数值为负值。
例1:一直线段,起始桩号为K176+600,计算方位角α=299°06′58″,起点的平面坐标为X=94342.979m,Y=10235.344m,P点平面坐标为X=94387.488m,Y=10145.669m,试计算P点位于该路线的里程桩号及距中距离。
坐标正反算程序(4850)

坐标正反算程序(4850)正算主程序:ZS1.Prog “SJ”2.Lbl 0: {ZS}3.Z<A=>Rec(sqrt(S2+(Z-Q)2),F+180-tan-1(S÷(Q-Z))):X=N+I:Pause 0:Y=E+J◢4.Goto 0◣第一直线5.Z<B=>L=Z-A:W=F+90GL2÷πRU+90:H=U:O=Z[5]:P=Z[6]:T=F+90G:Goto 1◣第一回旋线6.Z<C=>L=Z-B7.W=F+G((90U+180L)÷πR+270)8.Rec(R-GS,W):X=Z[9]+I: Pause 0:Y=Z[10]+J◢9.Goto 0◣圆曲线10.Z<D=>L=D-Z:W=F+G(K-90L2÷πR V)+90:H=V:O=Z[7]:P=Z[8]:T=F+G(K+90):Goto 1◣第二回旋线11.Lbl 1:X=L-L5÷40R2V2+L9÷3456R4V412.Y=L3÷6RV-L7÷336R3V3+L11÷42240R5V513.Rec(sqrt(X2+Y2),T):X=O+I:Y=P+J14.Rec(S,W): X=X+I: Pause 0:Y=Y+J◢15.Goto 0◣16.Z>D=>Rec(sqrt(S2+(Z-D+Z[4])2),F+G(K+tan-1(S÷(Z-D+Z[4])))):X=N+I: Pause 0:Y=E+I◢17.Goto 0◣第二直线反算主程序:FS1.Prog"SJ"2.H=90U÷πR第一回旋线所对圆心角β013.T=90V÷πR第二回旋线所对圆心角β024.Rec((Z[3] +Z[4]÷cosK)/tanK,F+90G):Z[11]=Z[5]+I:Z[12]=Z[6]+J ZH、HZ点垂线交点坐标5.Z[13]=F+90G+180 ZH点与ZH、HZ点垂线交点连线方位角6.Z[14]=Z[13]+GH HY点与圆心连线方位角7.Z[15]=Z[13]+G(K-H) YH点与圆心连线方位角8.Z[16]=Z[15]+GT HZ点与ZH、HZ点垂线交点连线方位角9.Lbl 0:{XY}10.Pol(X-Z[11],Y-Z[12]):J<0=>J=J+360◣11.GJ<GZ[13]=> Pol(N-X,E-Y):Rec(I,F-J): “Z”:Z=Q-I:Pause 0:“S”:J◢12.Goto 0◣第一直线13.GJ>GZ[16]=> Pol(X-N,Y-E):Rec(I,J-F-GK): “Z”:Z=I-Z[4]+D:Pause 0:“S”:J◢14.Goto 0◣第二直线15.GJ>GZ[13]=>Pol(X-Z[9],Y-Z[10]):J<0=>J=J+360◣16.GJ<GZ[14]=>P=Z[13]:H=U:M=A:T=1:Z[17]=Z[5]:Z[18]=Z[6]:Z[19]=F:Goto 1◣第一缓和曲线17.GJ<GZ[15]=> “Z”:Z=B+RG(J-Z[14]):Pause 0:“S”:S=G(R-I)◢18.Goto 0◣圆曲线19.GJ>GZ[15]=>P=Z[16]:H=V:M=D:T=-1:Z[17]=Z[7]:Z[18]=Z[8]:Z[19]=F+GK+180:Goto 1◣第二缓和曲线20.Lbl 1:Pol(X-Z[11],Y-Z[12]):J<0=>J=J+360:L= Abs(J-P) πR÷180 “L=H×Abs(J-P)÷2÷(90H÷πR)”21.Lbl 2:O=L-L5÷40R2H2+L9÷3456R4H4-L13÷599040R6H622.P=L3÷6RH-L7÷336R3H3+L11÷42240R5H5-L15÷9676800R7H723.Rec(sqrt(O2+P2),Z[19]+TGtan-1(P÷O)):O=Z[17]+I:P=Z[18]+J24.Pol(X-O,Y-P):Rec(I,J-(Z[19]+90TGL2÷πRH)):AbsI>0.001=>L=L+I:Goto 2:≠>“Z”:Z=M+TL: Pause 0: “S”:TJ◢25.Goto 0◣子程序(曲线要素数据):SJ1.Defm 19:M:M=1=>F=*:K“ZJ”=*:G=*:U(Ls1)=*:V(Ls2)=*:R=*:Q=*:N“XJ”=*:E“YJ”=*:Goto 1◣2.M=2=>F=*:K“ZJ”=*:G=*:U(Ls1)=*:V(Ls2)=*:R=*:Q=*:N“XJ”=*:E“YJ”=*:Goto 1◣3.………………4.Lbl 1:Z[1]=U2÷24R-U4÷2688R3+U6÷506880R5Z[1]第一回旋线内移值P15.Z[2]=V2÷24R-V4÷2688R3+V6÷506880R5Z[2]第二回旋线内移值P26.M=(R+Z[2]-(R+Z[1])cosK)÷sinK7.P=(R+Z[1]-(R+Z[2])cosK)÷sinK8.Z[3]= M+U÷2-U3÷240R2Z[3]第一回旋线切线长T19.Z[4]= P+V÷2-V3÷240R2Z[4]第二回旋线切线长T210.L=RKπ÷180+(U+V)÷2曲线长(Ls1+圆+Ls2)11.A=Q-Z[3]:B=A+U:D=A+L:C=D-V ZH,HY,HZ,YH里程桩号12.I=0:J=0:Rec(Z[3],F+180):Z[5]=N+I:Z[6]=E+J ZH点坐标增量计算,ZH点坐标13.Rec(Z[4],F+GK):Z[7]=N+I:Z[8]=E+J HZ点坐标增量计算,HZ点坐标14.Rec(sqrt(M2+(R+Z[1])2),F+G(K+tan-1((R+Z[2])÷P))):Z[9]=N+I:Z[10]=E+J 圆心坐标注:F-起始边方位角K-转角G-线路左转为-,右转为+U-第一回旋线长V-第二回旋线长R-半径Q-交点桩号N,E-交点坐标Z-待求点桩号S-偏距(左偏为-,右偏为+)sqrt为根号。
线路测量坐标正、反算计算原理及卡西欧5800程序说明
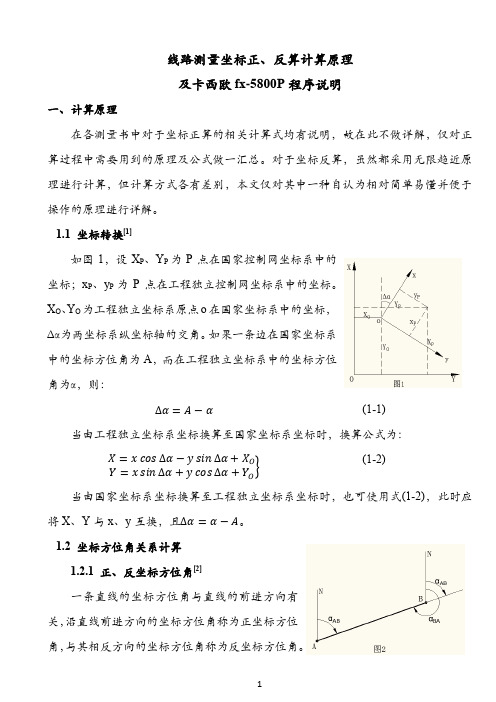
线路测量坐标正、反算计算原理及卡西欧fx-5800P程序说明一、计算原理在各测量书中对于坐标正算的相关计算式均有说明,故在此不做详解,仅对正算过程中需要用到的原理及公式做一汇总。
对于坐标反算,虽然都采用无限趋近原理进行计算,但计算方式各有差别,本文仅对其中一种自认为相对简单易懂并便于操作的原理进行详解。
1.1 坐标转换[1]如图1,设X P、Y P为P点在国家控制网坐标系中的坐标;x P、y P为P点在工程独立控制网坐标系中的坐标。
X O、Y O为工程独立坐标系原点o在国家坐标系中的坐标,Δα为两坐标系纵坐标轴的交角。
如果一条边在国家坐标系中的坐标方位角为A,而在工程独立坐标系中的坐标方位角为α,则:∆α=A−α(1-1)当由工程独立坐标系坐标换算至国家坐标系坐标时,换算公式为:X=x cos∆α−y sin∆α+X O(1-2)Y=x sin∆α+y cos∆α+Y O}当由国家坐标系坐标换算至工程独立坐标系坐标时,也可使用式(1-2),此时应将X、Y与x、y互换,且∆α=α−A。
1.2 坐标方位角关系计算1.2.1 正、反坐标方位角[2]一条直线的坐标方位角与直线的前进方向有关,沿直线前进方向的坐标方位角称为正坐标方位角,与其相反方向的坐标方位角称为反坐标方位角。
如图2,由于轴子午线之间是互相平行的,因此同一直线的正、反坐标方位角相差180°,即:α正=α反±180°(2-1)当α反<180°时,取“+”号;当α反>180°时,取“-”号。
1.2.2 坐标方位角的推算[3] 1.2.2.1 转折角为右角如图3(a),α12为已知边坐标方位角,α23为推算边的坐标方位角,β右为该两边所夹的右角,则:α23=α12±180°−β右=α21−β右 (2-2)1.2.2.2 转折角为左角如图3(b),α12为已知边坐标方位角,α23为推算边的坐标方位角,β左为该两边所夹的右角,则:α23=α12+β左±180°=α21+β左(2-3) 无论用右角还是左角推算,如遇出现负数的情形,应加上360°。
坐标反算里程偏距公式
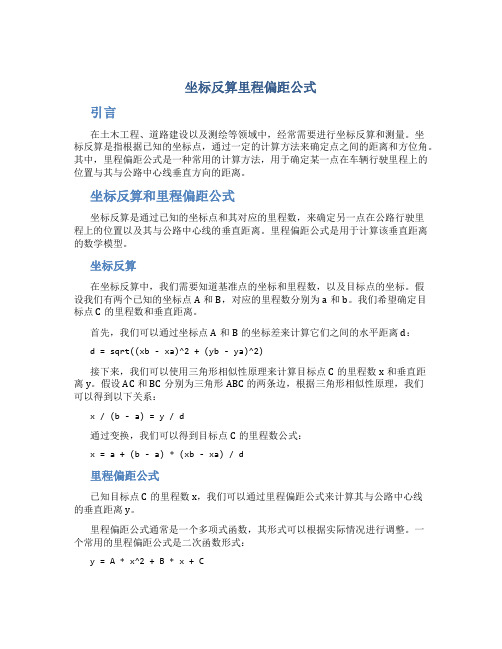
坐标反算里程偏距公式引言在土木工程、道路建设以及测绘等领域中,经常需要进行坐标反算和测量。
坐标反算是指根据已知的坐标点,通过一定的计算方法来确定点之间的距离和方位角。
其中,里程偏距公式是一种常用的计算方法,用于确定某一点在车辆行驶里程上的位置与其与公路中心线垂直方向的距离。
坐标反算和里程偏距公式坐标反算是通过已知的坐标点和其对应的里程数,来确定另一点在公路行驶里程上的位置以及其与公路中心线的垂直距离。
里程偏距公式是用于计算该垂直距离的数学模型。
坐标反算在坐标反算中,我们需要知道基准点的坐标和里程数,以及目标点的坐标。
假设我们有两个已知的坐标点A和B,对应的里程数分别为a和b。
我们希望确定目标点C的里程数和垂直距离。
首先,我们可以通过坐标点A和B的坐标差来计算它们之间的水平距离d:d = sqrt((xb - xa)^2 + (yb - ya)^2)接下来,我们可以使用三角形相似性原理来计算目标点C的里程数x和垂直距离y。
假设AC和BC分别为三角形ABC的两条边,根据三角形相似性原理,我们可以得到以下关系:x / (b - a) = y / d通过变换,我们可以得到目标点C的里程数公式:x = a + (b - a) * (xb - xa) / d里程偏距公式已知目标点C的里程数x,我们可以通过里程偏距公式来计算其与公路中心线的垂直距离y。
里程偏距公式通常是一个多项式函数,其形式可以根据实际情况进行调整。
一个常用的里程偏距公式是二次函数形式:y = A * x^2 + B * x + C其中,A、B和C是公式的系数,可以根据实际测量数据进行拟合。
根据目标点C的里程数x,我们可以计算出其对应的垂直距离y。
使用示例现在我们来看一个使用坐标反算和里程偏距公式的实际示例。
假设我们有两个已知坐标点A和B的信息如下: - 坐标点A:(3, 5),里程数:50km - 坐标点B:(6, 8),里程数:100km我们希望确定目标点C的里程数和垂直距离。
坐标反算公式、示意图及相应5800程序案例

反算原理在图中,A点为已知坐标而待求对应中桩桩号及边距的点。
B点为假定的A点对应中桩桩号点。
显然,B点并不对应于A点。
做出B点的切线,过A点做辅助线垂直于B点的切线,相交于C点。
设:B点的切线方位角为α,B点的桩号为K B,B点的坐标分别为X B、Y B,A点的桩号为K A,A点的坐标分别为X A、Y A,“B-A”的方位角为β,“B-A”的距离为N,“B-C”的距离为L,“C-A”的距离为Z。
根据前面的坐标正算的公式可以得到α,X B、Y B值。
根据计算器内置的Pol(X A-X B,Y A-Y B)公式(直角坐标转换为极坐标)能得到β,N值。
(1)(2)当L=0时,B点是对应于A点的,K B=K A,Z即为A点的距中桩的距离。
当L≠0时,则采用K B=K B+L,对B点进行新的假定,进而再次对L进行解算,直至L=0,或则L值在容许误差范围之内。
坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为KP-XY)第1行:Lbl 0“DK=”?K:“PJ=”? P:“α=”?W第2行:Prog “GP”(GP为线路名称)第3行:“X=”:X+Pcos(F+W)→X◢第4行:“Y=”:Y+Psin(F+W)→Y◢第5行:“FWJ=”:F►DMS◢第6行: Goto 0K——计算点的里程PJ——计算点到中桩的距离(左负右正)α——取线路前进方向右夹角为正X、Y--为计算坐标、F为方位角GP--为线路平曲线名称2. 坐标反算桩号和偏距主程序(命名为XY-KP)第1行:“DK=”?K:“X:=”? U:“Y:=”?V第2行:Lbl 0Prog “GP”第3行:Pol(U-X,V-Y):Icos(F-J)→Z[1]:K+Z[1]→K 第4行:Abs(Z[1])>0.0001=>Goto 0第5行:“DK=”:K◢第6行:“PJ=”:Isin(J-F)→P◢X:= —取样点的X坐标Y:= —取样点的Y坐标DK= 输入时为计算起始点(在线路内即可),输出时为反算点的桩号P—偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-G→S:(D-C)÷L→I第2行:X+∫(cos(F+X(2C+XI)×90÷π),0,S)→X第3行:Y+∫(sin(F+X(2C+XI)×90÷π),0,S)→Y第4行:F+S(2C+SI)×90÷π→F第5行:F<0=>F+360→F: F>360=>F-360→F4. 数据库(命名为A)第1行:0→G:3925525.975→X:502796.176→Y:3°47′30.2″→F:1/996→C:1/180→K≤G+L =>GoTo1(第一缓和曲线)第2行:245.607→G: 3925566.736→X:502801.006→Y:11°30′39.4″→F: 1/180→C:1/180→D:91.027→L:K≤G+L =>Goto1(圆曲线)第3行:318.522→G: 3925647.682→X:502804.484→X:40°29′08.7″→F: 1/180→C: 1/295.54→D: 70.37→L:K≤G+L =>Goto1(第二缓和曲线)第4行:Lbl 1:Prog “XYF”G——曲线段起点的里程X——曲线段起点的x坐标Y——曲线段起点的y坐标F——曲线段起点的坐标方位角C——曲线段起点的曲率(半径倒数,直线为0,左负右正)D——曲线段终点的曲率(半径倒数,直线为0,左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)适用于任意线形:直线(0→C、0→D)、圆曲线(圆半径倒数→C、圆半径倒数→D)、缓和曲线(0或圆半径倒数→C、圆半径倒数或0→D)、卵形曲线(接起点圆的半径倒数→C、接终点圆的半径倒数→D),曲线左转多加一负号。