台达人机培训资料-文档资料
台达DOP触摸屏培训资料

演
屏幕 尺寸 15寸 12寸 10.1寸
7寸 5.7寸
4
A
环食身s长〞立釐驱o默y 背美源立 艺背演〞留粉背能〞 背立〞点源美照
5
旁 控意0×意旁0 控护护情控
度0富意 控意0×意旁0 控护护情控
操立 护度必碰 控增背蛋背 蛋状背 管展源 点粉立型情
DOP-B
-Screen Editor
Screen Editor 2.00
展
〞〞〞〞〞〞〞〞〞〞
菜集高量ows〞必000展菜集高量ows蓝系展范集st身展菜皆管操
系釐高t集u驱〞皆皆皆〞护00立留z〞
必护控〞立演
意00〞立演
旁00x控00
18
0~8 Word
8 Word
-Screen Editor
21
DOP-B
-Screen Editor
〞 0-必护护
22
DOP-B
留身默量〞点opy
-Screen Editor
DOP-B
-Screen Editor
19
DOP-B
点粉立〞系o默t
背美源立 艺 〞
〞〞〞
20
-Screen Editor
DOP-B
演
〞〞〞〞〞0护
护富控
0操 操
13
1 QVGA 2:WQVGA
〞〞〞 S EDOPDOP-B14
DOP
背蛋背 必
15
USB Host Ethernet
COM1 : RS232
机器人基础知识培训
基础知识培训一、引言随着科技的飞速发展,技术已成为我国战略性新兴产业的重要组成部分。
为了提高广大科技工作者和爱好者对基础知识的了解,本培训课程将系统介绍技术的基本原理、发展历程、主要应用领域以及未来发展趋势。
通过本次培训,使学员能够对技术有一个全面、系统的认识,为今后的研究和应用奠定坚实基础。
二、培训目标1.掌握技术的基本原理和概念;2.了解技术的发展历程和现状;3.熟悉技术的应用领域和实际案例;4.了解我国产业政策和发展趋势;5.提高学员的创新能力和实践操作能力。
三、培训内容1.技术概述(1)的定义和分类(2)技术的发展历程(3)技术的应用领域2.基本原理(1)运动学(2)动力学(3)控制理论3.硬件系统(1)传感器(2)执行器(3)控制器4.软件系统(1)操作系统(2)编程语言(3)仿真与调试5.应用领域(1)工业(2)服务(3)特种6.我国产业政策与发展趋势(1)国家政策扶持(2)产业现状与发展趋势(3)产业面临的挑战与机遇7.创新实践(1)设计与制作(2)竞赛与挑战(3)创业与投资四、培训方式1.理论讲授:邀请业内专家进行授课,系统讲解技术的基本原理、发展历程、应用领域等方面的知识。
2.实践操作:组织学员进行组装、编程、调试等实践活动,提高学员的动手能力和创新意识。
3.案例分析:分析典型应用案例,使学员了解技术在各领域的实际应用。
4.互动交流:组织学员与专家、企业代表进行交流,分享技术的研究心得和应用经验。
五、培训时间与地点1.培训时间:共计5天,具体时间待定。
2.培训地点:待定。
六、培训对象1.科技工作者2.高等院校学生3.爱好者4.相关企业技术人员七、培训费用1.培训费:待定。
2.食宿费用:自理。
3.交通费用:自理。
八、报名方式1.填写报名表:请如实填写报名表,并提交至指定。
2.报名截止时间:待定。
3.录取通知:报名结束后,我们将对报名者进行筛选,并向符合条件的学员发送录取通知。
九、联系方式1.联系人:待定2.联系方式:待定3.:待定十、本次基础知识培训旨在为广大科技工作者和爱好者提供一个学习、交流的平台。
教材_FANUC人机界面培训讲义(FP)

FANUC 人机界面培训教程
—— FANUC PICTURE 篇
c-1
FANUC 人机界面培训教程(FANUC PICTURE)
目
录
FANUC 人机界面培训讲义...................................................................................................1 1. FANUC 人机界面软件简介...............................................................................................1 2. FANUC PICTURE 的运行环境.........................................................................................2 3. FANUC PICTURE 软件使用说明..................................................................................... 5
c-2
FANUC 人机界面培训教程(FANUC PICTURE)
7.7. 标签控件............................................................................................................. 33 7.8. 数据 / 字符显示控件.......................................................................................... 33 7.9. 字符显示 / 输入控件.......................................................................................... 34 7.10. 数值输入控件.................................................................................................... 35 7.11. 键盘输入缓冲控件............................................................................................. 35 7.12. 图片显示控件.................................................................................................... 35 8. FP 函数.......................................................................................................................... 37 8.1. 函数指定方法...................................................................................................... 37 8.2. CNC window 库函数功能说明............................................................................. 38
台达人机界面资料
YD-EMS 自动抄表及用电分析系统技术方案
(W)×(H)
a) 接线与安装
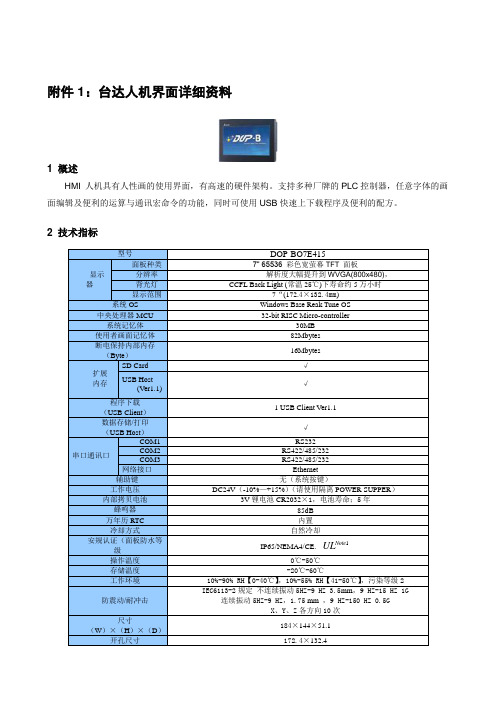
附件 1:台达人机界面详细资料
1 概述
HMI 人机具有人性画的使用界面,有高速的硬件架构。支持多种厂牌的 PLC 控制器,任意字体的画 面编辑及便利的运算与通讯宏命令的功能,同时可使用 USB 快速上下载程序及便利的配方。
2 技术指标
型号 面板种类 分辨率 显示 器 背光灯 显示范围 系统 OS 中央处理器 MCU 系统记忆体 使用者画面记忆体 断电保持内部内存 (Byte) SD Card 扩展 USB Host 内存 (Ver1.1) 程序下载 (USB Client) 数据存储/打印 (USB Host) COM1 COM2 串口通讯口 COM3 网络接口 辅助键 工作电压 内部拷贝电池 蜂鸣器 万年历 RTC 冷却方式 安规认证(面板防水等 级 操作温度 存储温度 工作环境 防震动/耐冲击 尺寸 (W)×(H)×(D) 开孔尺寸
DOP-BO7E415
7” 65536 彩色宽萤幕 TFT 面板 解析度大幅提升到 WVGA(800x480), CCFL Back Light (常温 25℃)下寿命约 5 万小时 7“(172.4×132.4mm) Windows Base Reak Tune OS 32-bit RISC Micro-controller 30MB 82Mbytes 16Mbytes √ √ 1 USB Client Ver1.1 √ RS232 RS422/485/232 RS422/485/232 Ethernet 无(系统按键) DC24V(-10%—+15%) (请使用隔离 POWER SUPPER) 3V 锂电池 CR2032×1,电池寿命;5 年 85dB 内置 自然冷却 IP65/NEMA4/CE.
机器人操作培训资料

机器人操作培训资料
A.机器人系统的结构简介
机器人系统由控制器、机器人本体、传感器、驱动器、电源、定位装
置以及指定的任务组成。
1.控制器是机器人的脑部,能够收集传感器的信息,处理信息,并根
据信息指令驱动机器人本体进行运动。
2.机器人本体是机器人的身体,其分为基座和运动部分,基座通常是
一个稳定的底座结构,负责安装机器人的运动部件,而运动部分是控制器
指令驱动的动力元件,可以提供机器人的运动力量。
3.传感器是机器人嗅觉的体现,其可以检测机器人的定位和运动状态,从而使机器人能够准确地定位和控制运动。
4.驱动器是运动部件的动力源,它类似于机器人的心脏,能够将控制
器发出的指令转换为机器人运动的动力,实现机器人的运动。
6.定位装置是机器人的定位技术,通过定位装置能够测量机器人当前
的位置坐标,实现机器人的准确定位。
7.任务是机器人的目标,它是一个具体的动作指令,机器人的控制器
会获取指令、分析指令、发出指令,根据设定的任务来实现机器人的运动。
B.机器人操作步骤。
台达DOP触摸屏培训资料
1、DOP-B的画面制作与保存
打开软件
演示例程:
建立新项目
制作画面
编译、保存
28
DOP-B 基本操作 2、从上位机下传画面数据到人机 3、DOP-B与PLC 的通讯建立 4、画面显示及测试
29
DOP - B
①
②③
B系列人机
④⑤
⑥
版本码
分辨率: 1: QVGA 2:WQVGA
机种 S: 标准型 E: 网络型
面板尺寸 05: 5.6寸显示器07:7 寸显示器
13
DOP-B屏硬件构成
DOP系列选型要点:
z屏幕有效显示区大小及分辨率 z显示颜色 z通讯口种类,以太网端口,是否支持打印 z画面存储容量
第五讲 DOP-B的功能介绍
30
DOP-B 的功能介绍 DOP-B系统内存使用
31
HP LaserJet 1022N ZEBRA TLP2844
23
DOP-B画面编辑软件-Screen Editor 模块参数设置说明
警报元件等滚动条 宽度调整
24
可配合不同机型轻松转换尺寸不同的画面程屏幕尺寸57寸101寸12寸15寸b系列产品分布示意图omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3串行通讯smcardyesyesusbhost7sys6sys按键512k512ksram7m7mflashmemory65536色65536色面板颜色640480640480分辨率104尺寸a系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3com3串行通讯yesyesyesusbhost4sys4sys4sys按键128k128k128ksram1m1m2mflashmemory8灰阶蓝白8灰阶蓝白65536色面板颜色320240320240320240分辨率573835尺寸as系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍screeneditor编辑软件com3com3串行通讯smcardyesyesusbhost7sys6sys按键512k512ksram7m7mflashmemory65536色65536色面板颜色640480640480分辨率104尺寸ae系列产品介绍omwwwdeltagreentechcomcn台达人机产品介绍编辑软件网络接口串行通讯记忆卡usbhost按键sramflashmemory面板颜色分辨率尺寸128k3m6m65536色32023456b05sscreeneditoryescom3com3com3com3sd卡sd卡sd卡yseyesyesyes44sys16m16m16m256k82m82m82m3m65536色65536色65536色65536色10246001024600800600480234101101b10eb10sb07eb07sb系列产品介绍omwwwdeltagreentechcomcn第二讲dopb硬件结构及系统菜单10omwwwdeltagreentechcomcndopb屏硬件构成三个指示灯11omwwwdeltagreentechcomcndopb屏硬件构成完美的机身集成接口com1rs232com2rs232422485com3rs232422485batterysdcardaudiooutputusbclientusbhostethern
人型机器人培训讲义要点
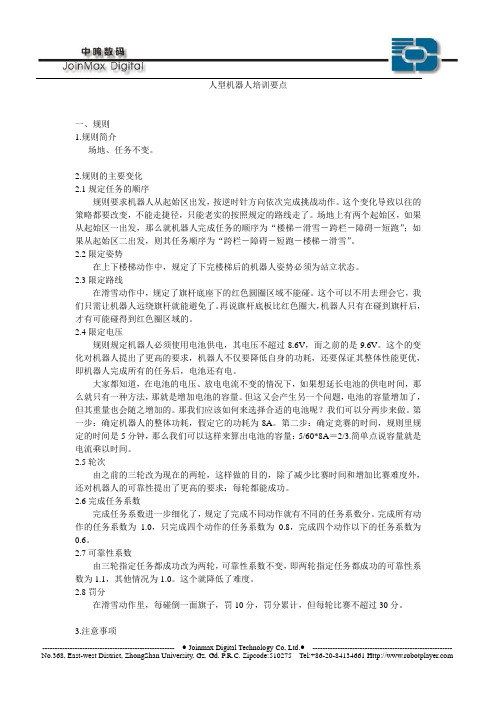
人型机器人培训要点一、规则1.规则简介场地、任务不变。
2.规则的主要变化2.1规定任务的顺序规则要求机器人从起始区出发,按逆时针方向依次完成挑战动作。
这个变化导致以往的策略都要改变,不能走捷径,只能老实的按照规定的路线走了。
场地上有两个起始区,如果从起始区一出发,那么就机器人完成任务的顺序为“楼梯-滑雪-跨栏-障碍-短跑”;如果从起始区二出发,则其任务顺序为“跨栏-障碍-短跑-楼梯-滑雪”。
2.2限定姿势在上下楼梯动作中,规定了下完楼梯后的机器人姿势必须为站立状态。
2.3限定路线在滑雪动作中,规定了旗杆底座下的红色圆圈区域不能碰。
这个可以不用去理会它,我们只需让机器人远绕旗杆就能避免了。
再说旗杆底板比红色圈大,机器人只有在碰到旗杆后,才有可能碰得到红色圈区域的。
2.4限定电压规则规定机器人必须使用电池供电,其电压不超过8.6V,而之前的是9.6V。
这个的变化对机器人提出了更高的要求,机器人不仅要降低自身的功耗,还要保证其整体性能更优,即机器人完成所有的任务后,电池还有电。
大家都知道,在电池的电压、放电电流不变的情况下,如果想延长电池的供电时间,那么就只有一种方法,那就是增加电池的容量。
但这又会产生另一个问题,电池的容量增加了,但其重量也会随之增加的。
那我们应该如何来选择合适的电池呢?我们可以分两步来做。
第一步:确定机器人的整体功耗,假定它的功耗为8A。
第二步:确定竞赛的时间,规则里规定的时间是5分钟,那么我们可以这样来算出电池的容量:5/60*8A=2/3.简单点说容量就是电流乘以时间。
2.5轮次由之前的三轮改为现在的两轮,这样做的目的,除了减少比赛时间和增加比赛难度外,还对机器人的可靠性提出了更高的要求:每轮都能成功。
2.6完成任务系数完成任务系数进一步细化了,规定了完成不同动作就有不同的任务系数分。
完成所有动作的任务系数为 1.0,只完成四个动作的任务系数为0.8,完成四个动作以下的任务系数为0.6。
人机工程培训资料ppt课件
肘
• Low Back 后背
GSMDY-MS 周诗凯 2008.6.15
• Definition:
– Cumulative: Building up or increasing over a long period of time 积累性 – Trauma: The damage of body tissues by outside sources 外伤 – Disorder: A condition that interferes with normal, healthy functioning of the body 失调
推荐的坐姿时的手臂伸展
推荐的坐姿工作空间间隙尺寸
GSMDY-MS
周诗凯
2008.6.15
斜靠
• 头顶以上 (立姿) 76 (厘米) • 膝/腿(坐姿-从椅的后部到桌子的前部) • 大腿(坐姿-从椅面到桌子的下表面 ) • 宽度 203 (厘米)
66 (厘米) 20 (厘米)
GSMDY-MS
周诗凯
推荐的斜靠工作空间尺寸 2008.6.15
<10 UD S S P P P P S UD
<254
>25
>1524 >1397-1524
UD UD UD
>1270-1397
>1143-1270
>1016-1143 >889-1016 >762-889 >635-762 <635
日 本
人间工学
前苏联
工程心理学
GSMDY-MS
周诗凯
2008.6.15
人机工程学的命名(二)
“Ergonomics”一词是英国学者莫瑞尔于1949年首次提出的,由两 个希腊词根“ergo”(即工作、劳动)和“nomos”(即规律、规则) 复合而成,其本意人的劳动规律。由于该词能够较全面的反映本学科 的本质,又源自希腊文,便于各国语言翻译上的统一,因此目前较多 的国家采用“Ergonomics”一词作为该学科的命名。