机器视觉系统————图像采集卡
一个典型的机器视觉系统包括哪些硬件
⼀个典型的机器视觉系统包括哪些硬件⼀个典型的机器视觉系统包括以下五⼤块:1.照明照明是影响机器视觉系统输⼊的重要因素,它直接影响输⼊数据的质量和应⽤效果。
由于没有通⽤的机器视觉光源照明设备,所以针对每个特定的应⽤实例,要选择相应的照明装置,以达到最佳效果。
光源可分为可见光和不可见光。
常⽤的⼏种可见光源是⽩帜灯、⽇光灯、⽔银灯和钠光灯。
可见光的缺点是光能不能保持稳定。
如何使光能在⼀定的程度上保持稳定,是实⽤化过程中急需要解决的问题。
另⼀⽅⾯,环境光有可能影响图像的质量,所以可采⽤加防护屏的⽅法来减少环境光的影响。
照明系统按其照射⽅法可分为:背向照明、前向照明、结构光和频闪光照明等。
其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得⾼对⽐度的图像。
前向照明是光源和摄像机位于被测物的同侧,这种⽅式便于安装。
结构光照明是将光栅或线光源等投射到被测物上,根据它们产⽣的畸变,解调出被测物的三维信息。
频闪光照明是将⾼频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
2.镜头⼯业镜头FOV(Field Of Vision)=所需分辨率*亚象素*相机尺⼨/PRTM(零件测量公差⽐)镜头选择应注意:①焦距②⽬标⾼度③影像⾼度④放⼤倍数⑤影像⾄⽬标的距离⑥中⼼点 / 节点⑦畸变3.相机按照不同标准可分为:标准分辨率数字相机和模拟相机等。
要根据不同的实际应⽤场合选不同的相机和⾼分辨率相机:线扫描CCD和⾯阵CCD;单⾊相机和彩⾊相机。
AFTvision机器视觉⼯业相机4.图像采集卡图像采集卡只是完整的机器视觉系统的⼀个部件,但是它扮演⼀个⾮常重要的⾓⾊。
图像采集卡直接决定了摄像头的接⼝:⿊⽩、彩⾊、模拟、数字等等。
⽐较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进⾏处理。
有些采集卡有内置的多路开关。
例如,可以连接8个不同的摄像机,然后告诉采集卡采⽤那⼀个相机抓拍到的信息。
有些采集卡有内置的数字输⼊以触发采集卡进⾏捕捉,当采集卡抓拍图像时数字输出⼝就触发闸门。
机器视觉系统组成总结

机器视觉系统组成总结机器视觉系统通常由以下几个主要组成部分构成:
1. 图像采集设备
- 数字相机或工业相机
- 照明系统
- 镜头和滤光片
2. 图像传输接口
- 数据传输线路
- 图像采集卡或帧存储器
3. 图像处理硬件
- 中央处理器()
- 图形处理器()
- 数字信号处理器()
- 现场可编程门阵列()
4. 图像处理软件
- 图像预处理模块
- 图像分割模块
- 特征提取模块
- 模式识别模块
- 决策模块
5. 输出设备
- 显示器
- 控制系统
- 机器人执行器
6. 通信接口
- 工业以太网
- 现场总线
- 无线通信
机器视觉系统的各个组成部分协同工作,完成从图像采集到处理、分析、识别和执行控制的全过程。
每个部分都对系统的整体性能和可靠性起着重要作用。
根据具体应用场景和需求,可以对各个组成部分进行优化和定制化设计。
机器视觉工程师招聘笔试题及解答(某大型集团公司)2025年

2025年招聘机器视觉工程师笔试题及解答(某大型集团公司)(答案在后面)一、单项选择题(本大题有10小题,每小题2分,共20分)1、以下哪个技术不属于机器视觉的预处理步骤?A、灰度化B、滤波C、神经网络D、边缘检测2、在机器视觉中,以下哪个算法主要用于图像分割?A、K-means聚类算法B、卡尔曼滤波C、支持向量机(SVM)D、霍夫变换3、题干:在机器视觉中,以下哪个术语描述了一种通过检测图像中的特定形状或图案来识别物体的方法?A. 边缘检测B. 特征提取C. 光流分析D. 深度学习4、题干:以下哪种技术通常用于在机器视觉系统中实现图像增强,以提高图像质量或突出特定特征?A. 图像滤波B. 图像分割C. 图像压缩D. 图像配准5、题干:以下哪个技术不属于机器视觉中的图像预处理技术?A. 图像去噪B. 图像增强C. 图像分割D. 深度学习6、题干:在机器视觉中,以下哪种算法主要用于检测图像中的边缘?A. 卡尔曼滤波B. Canny边缘检测算法C. 支持向量机D. 欧几里得距离变换7、以下哪个技术不属于机器视觉系统的基本组成部分?A、图像采集模块B、图像处理算法C、数据库管理D、传感器8、在机器视觉系统中,以下哪种图像处理技术主要用于消除图像噪声?A、边缘检测B、滤波C、颜色空间转换D、特征提取9、题干:在机器视觉系统中,用于检测物体边缘的常用算法是:A. 模糊算法B. 区域生长算法C. Canny边缘检测算法D. Hough变换 10、题干:以下哪种传感器在机器视觉系统中常用于获取图像数据?A. 温度传感器B. 加速度传感器C. 激光测距传感器D. 红外线传感器二、多项选择题(本大题有10小题,每小题4分,共40分)1、以下哪些技术属于机器视觉领域的基础技术?()A、图像处理技术B、机器学习技术C、深度学习技术D、光学成像技术E、信号处理技术2、以下哪些是机器视觉系统的常见应用?()A、工业自动化检测B、医疗影像分析C、智能交通系统D、人脸识别E、卫星遥感图像处理3、以下哪些技术属于机器视觉领域的核心算法?()A. 支持向量机(SVM)B. 人工神经网络(ANN)C. 深度学习(Deep Learning)D. 神经元网络(Neural Network)4、以下哪些因素会影响机器视觉系统的性能?()A. 环境光照B. 摄像头分辨率C. 图像处理算法D. 图像采集速度5、以下哪些技术属于机器视觉中图像处理的基本技术?()A. 颜色转换B. 图像滤波C. 边缘检测D. 形态学变换6、在机器视觉系统中,以下哪些是常见的图像配准方法?()A. 空间变换B. 基于特征的配准C. 区域匹配D. 光流法7、以下哪些是机器视觉系统中常见的图像预处理步骤?A. 图像去噪B. 图像增强C. 图像分割D. 图像压缩E. 特征提取8、以下哪些算法在机器视觉的物体检测任务中应用广泛?A. 深度卷积神经网络(CNN)B. 基于Haar特征的级联分类器C. 光流法D. 模板匹配法E. 区域生长法9、以下哪些技术是机器视觉系统常见的图像处理技术?()A. 图像滤波B. 边缘检测C. 图像分割D. 3D重建 10、以下哪些因素会影响机器视觉系统的性能?()A. 图像质量B. 照明条件C. 系统算法D. 硬件配置三、判断题(本大题有10小题,每小题2分,共20分)1、机器视觉系统中的相机通常需要校准,以确保图像的准确性和一致性。
机器视觉检测系统【深度解读】

机器视觉检测系统现代工业自动化生产中涉及到各种各样的检验、生产监视和零件识别应用,如汽车零配件批量加工的尺寸检查和自动装配的完整性检查、电子装配线的元件自动定位、IC上的字符识别等。
通常这种带有高度重复性和智能性的工作是由肉眼来完成的,但在某些特殊情况下,如对微小尺寸的精确快速测量、形状匹配以及颜色辨识等,依靠肉眼根本无法连续稳定地进行,其它物理量传感器也难以胜任。
人们开始考虑用CCD照相机抓取图像后送入计算机或专用的图像处理模块,通过数字化处理,根据像素分布和亮度、颜色等信息来进行尺寸、形状、颜色等的判别。
这种方法是把计算机处理的快速性、可重复性与肉眼视觉的高度智能化和抽象能力相结合,由此产生了机器视觉检测技术的概念。
视觉检测技术是建立在计算机视觉研究基础上的一门新兴测试技术。
与计算机视觉研究的视觉模式识别、视觉理解等内容不同,视觉检测技术重点研究的是物体的几何尺寸及物体的位置测量,如轿车白车身三维尺寸的测量、模具等三维面形的快速测量、大型工件同轴度测量以及共面性测量等,它可以广泛应用于在线测量、逆向工程等主动、实时测量过程。
视觉检测技术在国外发展很快,早在20世纪80年代,美国国家标准局就曾预计未来90%的检测任务将由视觉检测系统来完成。
因此仅在80年代,美国就有100多家公司跻身于视觉检测系统的经营市场,可见视觉检测系统确实很有发展前途。
在近几届北京国际机床展览会上已经见到国外企业展出的应用视觉检测技术研制的先进仪器,如流动式光学三坐标测量机、高速高精度数字化扫描系统、非接触式光学三坐标测量机等。
2.机器视觉检测系统构成、分类及工作原理2.1 系统构成与工作原理(1)系统构成典型的视觉系统一般包括光源、镜头、CCD照相机、图像处理单元(或图像采集卡)、图像处理软件、监视器、通讯/输入输出单元等。
(2)工作原理视觉系统的输出并非图像视频信号,而是经过运算处理之后的检测结果(如尺寸数据)。
通常,机器视觉检测就是用机器代替肉眼来做测量和判断。
图像采集与图像采集系统概述

图像采集示意图
coms图像采集系统原理.
coms .
图 像 采 集 系 统 原 理
图像采集基本知识 视频采集 •即将视频转换成PC机可使用的数字格式。 微视专业图象采集卡是将视频信号经过AD转换后,经过PCI总线实时传到内存 和显存。 •在采集过程中,由于采集卡传送数据采用PCI Master Burst方式,图象传送速 度高达33MB/S,可实现摄像机图像到计算机内存的可靠实时传送,并且几乎不 占用CPU时间,留给CPU更多的时间去做图像的运算与处理。 •图象速率及采集的计算公式 •帧图像大小(Image Size):W×H(长×宽)---您必须首先了解:需要采集 多大的图象尺寸? • 颜色深度∶d(比特数)---希望采集到的图象颜色(8Bit灰度图象还是 16/24/32Bit真彩色) 帧 速∶f---标准PAL制当然就是25帧,非标准就没准了!500-1000帧都有可能 数 据 量∶Q(MB)---图象信号的数据量
4、分辨率:采集卡能支持的最大点阵反映了其分辨率的性能。一般采集卡能支持 768*576点阵,而性能优异的采集卡其支持的最大点阵可达64K*64K。单最大点数和 单帧最大行数也可反映采集卡的分辨率性能。 5、采样频率:采样频率反映了采集卡处理图像的速度和能力。在进行高度图像采集 时,需要注意采集卡的采样频率是否满足要求。 6、传输速率:主流图像采集卡与主板间都采用PCI接口,其理论传输速du132MB/S 。 随着数字化信息的快速发展,图像采集卡在监控、远程教学、大屏拼接、医疗等众 多行业中都有着广泛的应用。
• 视频采集卡是我们进行视频处理必不可少的硬件设备,是视频数字化合数字 • 化视频编辑后期制作中必不可少的硬件设备。通过视频采集卡,可以把摄像 • 机拍摄的视频信号从摄像带上转存到计算机中,利用相关的视频编辑软件 • , • 对数字化的视频信号进行后期编辑处理,比如剪切画面,添加滤镱,字幕和 • 音效,设置转场效果以及加入各种视频特效等等,最后将编辑完成的视频信 • 号转换成标准的VCD,DVD以及网上流媒体等格式,方便传播和保存
机器视觉工程师招聘笔试题与参考答案(某大型央企)2024年

2024年招聘机器视觉工程师笔试题与参考答案(某大型央企)(答案在后面)一、单项选择题(本大题有10小题,每小题2分,共20分)1、以下哪种传感器不属于常用的机器视觉系统中的图像采集设备?()A、CCD相机B、CMOS相机C、红外线传感器D、激光雷达2、在图像处理中,以下哪个步骤不属于图像增强的范畴?()A、灰度化B、锐化C、滤波D、边缘检测3、在机器视觉系统中,用于确定物体位置的算法通常被称为:A. 分类器B. 检测器C. 定位器D. 跟踪器4、以下哪种方法不是常用的图像去噪技术?A. 均值滤波B. 中值滤波C. 高斯滤波D. 直方图均衡化5、下列哪种传感器是机器视觉系统中常用的光源?A. 红外线传感器B. 紫外线传感器C. 可见光摄像头D. 激光雷达6、以下哪种图像处理算法用于图像二值化?A. 高斯模糊B. 中值滤波C. 归一化D. 阈值分割7、在机器视觉系统中,用于检测物体边缘或特征点的常用算法是?A. 傅里叶变换B. 卡尔曼滤波C. Canny边缘检测D. 霍夫变换8、在工业机器视觉应用中,为了提高图像对比度并突出感兴趣区域,经常采用哪种图像预处理技术?A. 图像旋转B. 灰度化C. 直方图均衡化D. 模板匹配9、以下哪个技术不属于机器视觉系统的关键技术?A. 模式识别B. 图像处理C. 机器学习D. 激光雷达 10、在机器视觉系统中,用于检测图像中物体边缘的算法是?A. 颜色分割B. 模板匹配C. Sobel算子D. 最近邻法二、多项选择题(本大题有10小题,每小题4分,共40分)1、在机器视觉系统中,下列哪些因素会影响图像处理的质量?A. 光源B. 相机分辨率C. 镜头焦距D. 图像处理算法2、以下哪些技术可以用于物体识别与分类?A. 卷积神经网络 (CNN)B. 支持向量机 (SVM)C. 决策树D. K-均值聚类3、以下哪些技术是机器视觉系统中常用的图像预处理技术?()A、灰度化B、滤波C、边缘检测D、几何变换E、直方图均衡化4、以下哪些是机器视觉系统中的特征提取方法?()A、颜色特征B、纹理特征C、形状特征D、轮廓特征E、光谱特征5、关于机器视觉系统的构成,以下哪些是正确的?()A、光源B、镜头C、图像传感器D、图像处理软件E、机械结构6、以下哪些技术属于机器视觉中的特征提取方法?()A、边缘检测B、角点检测C、纹理分析D、颜色识别E、形态学处理7、以下哪些是机器视觉系统中的基本组成部分?()A. 光源B. 相机C. 图像处理软件D. 传感器E. 机械结构8、以下哪些是机器视觉系统的应用领域?()A. 自动化检测B. 工业制造C. 医学影像分析D. 交通监控E. 生物识别9、以下哪些技术或算法常用于图像处理和机器视觉领域?()A. 深度学习B. 遗传算法C. 支持向量机D. 随机森林E. 卡尔曼滤波 10、在机器视觉系统中,以下哪些是常见的图像预处理步骤?()A. 图像增强B. 图像滤波C. 归一化D. 透视变换E. 颜色空间转换三、判断题(本大题有10小题,每小题2分,共20分)1、机器视觉系统中的摄像头可以完全替代人眼进行图像采集和处理。
机器视觉系统详述
右图中,绿色背景 采用红色光源提高 对比度 (灰阶图像)
光源
代码 R G B V W IR UV
颜色 红 绿 蓝 紫 白 红外 紫外
波长(nm) 625(600~720) 517(510~530) 465(430~480) 400 色温:5500k
应用 背景为黑色的透明软板孔位定位、绿色线路 板检测、透光膜厚度测量等。 红色背景产品检测、银色背景产品检测等。
• 特殊要求,需要用到红外或紫外相机情况
镜头--如何选择镜头
•
定焦与变焦 变焦镜头
工作距离不变的情况下获得不同的放大倍率
镜头--如何选择镜头
•
远心镜头与标准工业镜头
远心镜头
• 精密测量系统
CCTV镜头
• 一般工业测量、缺陷检测,对物体成像的放大倍率没有严格要求
远心镜头
CCTV镜头
镜头--如何选择镜头
目录
1 2
机器视觉系统构成 成像系统核心器件选型方法
3 4
5
机器视觉系统设计步骤 应用案例
飞行捕捉和相机丢帧解决办法
机器视觉系统构成
机 器 (Machine)
1、机器视觉系统介绍
+
视 觉 (Vision)
机械
运动
控制
视(硬件)
觉(软件)
机器视觉是一个系统的概念,运 用现代先进的控制技术、计算机 技术及传感技术,表现为光机电 的结合。
镜头
镜头畸变
畸变是镜头放大倍率随着视场变化而变化的现象。
测量应用,畸变越小越好
畸变可以通过软件进行校正
镜头
镜头景深
对于理想的光学系统,像平面对应一个理想物平面。实际光学
系统,能清晰成像的最远物面到理想物平面的距离称为远景深 度,能清晰成像的最近物面到对准平面的距离称为近景深度, 远景深度和近景深度的和就是光学系统的景深。
机器视觉检测系统
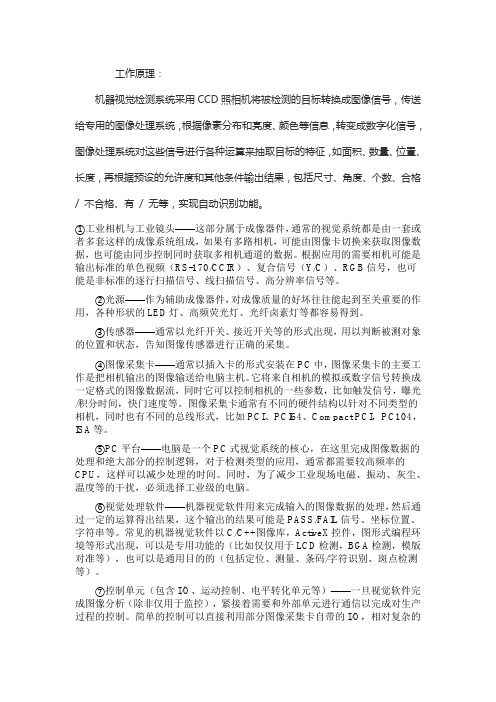
工作原理:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/ 不合格、有/ 无等,实现自动识别功能。
①工业相机与工业镜头——这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。
根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。
②光源——作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用,各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。
③传感器——通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态,告知图像传感器进行正确的采集。
④图像采集卡——通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。
它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。
图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
⑤PC平台——电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。
同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。
⑥视觉处理软件——机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器视觉系统————图像采集卡收藏
图像采集卡是机器视觉系统的重要组成部分,其主要功能是对相机所输出的视频数据进行实时的采集,并提供与PC的高速接口.
一、图像采集卡的基本概念
1、图像采集卡(Frame Graber)
图像采集卡是图像采集部分和处理部分的接口。
图像经过采样、量化以后转换为数字图像并输入、存储到帧存储器的过程,叫做采集、数字化。
2、A/D转换
视频量化处理是指将相机所输出的模拟视频信号转换为PC所能识别的数字信号的过程,即A/D转换。
视频信号的量化处理是图像采集处理的重要组成部分。
A/D转换过程
3、传输通道数(Channel)
采集卡同时对多个相机进行A/D转换的能力。
如:2通道、4通道。
4、分辨率
采集卡能支持的最大点阵反映了其分辨率的性能。
即,其所能支持的相机最大分辨率。
5、采样频率
采样频率反映了采集卡处理图像的速度和能力。
在进行高速图像采集时,需要注意采集卡的采样频率是否满足要求。
6、传输速率
指图像由采集卡到达内存的速度。
主流图像采集卡与主板间都采用PCI接口,其理论传输速度为132MB/S。
7、图像格式(像素格式)
(1)黑白图像:通常情况下,图像灰度等级可分为256级,即以8位表示。
在对图像灰度有更精确要求时,可用10位,12位等来表示。
(2)彩色图像:彩色图像可由RGB(YUV)3种色彩组合而成,根据其亮度级别的不同有8-8-8,10-10-10等格式。
8、图像采集卡附加功能
相机触发功能
灯源控制功能
基本I/O功能
相机复位功能
相机时序输出功能
9、颜色空间
对一种颜色进行编码的方法统称为“颜色空间”或“色域”(Color Space)。
——RGB(16位/24位/32位)
——YUV(YCbCr)
——其他(HSV、CMYK、数码相机自定义格式等)
——Alpha通道
10、帧和场
——标准的模拟视频信号是隔行信号,一帧分成两场
——偶数场包含所有的偶数行(0, 2, . . . )
——奇数场包含所有的奇数行(1, 3, . . . )
——采集和传输的过程中使用的是场,而不是帧
——一帧图像的两场之间有时间差
二、图像采集卡基本原理
1、视野(FOV)或现场是相机及光学系统“看”到的真实世界的具体部分。
2、CCD芯片将光能转化为电能。
3、相机将此信息以模拟信号的格式输出至图像采集卡。
4、AD –转换器将模拟信号转换成8 位(或多位)的数字信号。
每个象素独立地把光强以灰度值(Gray level)的形式表达。
5、这些光强值从CCD芯片的矩阵中被存储在内存的矩阵数据结构中。
三、视觉系统成象原理
灰度值(Gray Level)——象素光强弱信息的表示灰度值为真实世界图像量化的表现方法。
通常灰度值从最黑到最白为0 -255。
光线进入CCD象素,如果光强达到CCD感应的极限,此象素为纯白色。
对应于内存中该象素灰度值为255。
如果完全没有光线进入CCD象素,此象素为纯黑色。
对应于内存中该象素灰度值为0。
四、图像采集卡的组成
•视频输入模块;
•模数转换(A/D)模块;
•时序及采集控制模块;
•图像处理模块;
•总线接口及控制模块;
•输出及控制模块
五、图像采集卡分类
1、依据输入信号类型可以分为
模拟制式图像采集卡
数字图像采集卡
2、依据功能可以区分为
单纯功能的图像采集卡
集成图像处理功能的采集卡
六、图像采集卡的基本技术参数
•输入接口:数字,模拟;
•灰度等级;
•分辨率;
•带宽;
•传输速率;
七、板卡硬件发展趋势
1、传统图像采集卡(A/D转换)最终将被淘汰
2、CAMERALINK,FIREWIRE等数字接口采集卡很快将被广泛使用
本文来自CSDN博客,转载请标明出处:/happyopencv/archive/2008/10/19/3097938.aspx。