小斜臂说明书
拓斯达机械手使用说明书
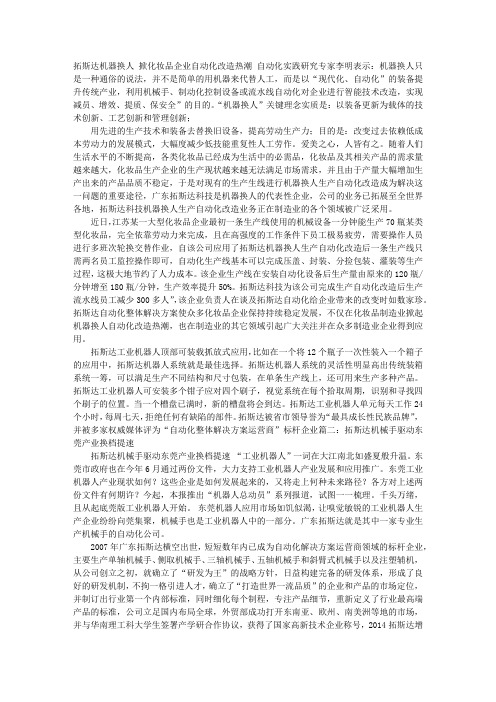
拓斯达机器换人掀化妆品企业自动化改造热潮自动化实践研究专家李明表示:机器换人只是一种通俗的说法,并不是简单的用机器来代替人工,而是以“现代化、自动化”的装备提升传统产业,利用机械手、制动化控制设备或流水线自动化对企业进行智能技术改造,实现减员、增效、提质、保安全”的目的。
“机器换人”关键理念实质是:以装备更新为载体的技术创新、工艺创新和管理创新;用先进的生产技术和装备去替换旧设备,提高劳动生产力;目的是:改变过去依赖低成本劳动力的发展模式,大幅度减少低技能重复性人工劳作。
爱美之心,人皆有之。
随着人们生活水平的不断提高,各类化妆品已经成为生活中的必需品,化妆品及其相关产品的需求量越来越大,化妆品生产企业的生产现状越来越无法满足市场需求,并且由于产量大幅增加生产出来的产品品质不稳定,于是对现有的生产生线进行机器换人生产自动化改造成为解决这一问题的重要途径,广东拓斯达科技是机器换人的代表性企业,公司的业务已拓展至全世界各地,拓斯达科技机器换人生产自动化改造业务正在制造业的各个领域被广泛采用。
近日,江苏某一大型化妆品企业最初一条生产线使用的机械设备一分钟能生产70瓶某类型化妆品,完全依靠劳动力来完成,且在高强度的工作条件下员工极易疲劳,需要操作人员进行多班次轮换交替作业,自该公司应用了拓斯达机器换人生产自动化改造后一条生产线只需两名员工监控操作即可,自动化生产线基本可以完成压盖、封装、分捡包装、灌装等生产过程,这极大地节约了人力成本。
该企业生产线在安装自动化设备后生产量由原来的120瓶/分钟增至180瓶/分钟,生产效率提升50%。
拓斯达科技为该公司完成生产自动化改造后生产流水线员工减少300多人”,该企业负责人在谈及拓斯达自动化给企业带来的改变时如数家珍。
拓斯达自动化整体解决方案使众多化妆品企业保持持续稳定发展,不仅在化妆品制造业掀起机器换人自动化改造热潮,也在制造业的其它领域引起广大关注并在众多制造业企业得到应用。
威猛机械手说明书2

治具夹取及进出模时间可双倍速度完成
加长的垂直臂便于堆垛
W733 - 夹具+产品重量可达 15 kg (33 lbs) - 垂直行程可达 1.800 mm (71“) - 柔性注塑自动化系统其锁模力可达到约750吨
W743 更大、更坚实的主臂及双壁X梁可使负载能力达到35 kg (77 lbs), 垂直行程达到2.600 mm (102”),可用于车间货物堆垛
机械手臂
水平行程 Z-轴最大 mm (inches)
垂直行程 Y-轴最大 mm (inches)
横向行程 X-轴最大 mm (inches) 横向行程 可达最大mm (inches) 最大载荷 制品+夹具最大kg (lbs) 注塑机 锁模力吨
技术数据的改动恕不另行通知
W733
5.000 (196.9)
伸缩臂
1.500 (59.1) 2.040 (80.3)
75 (165)
700 – 2.000
W773
10.000 (393.7)
3.000 (118.1)
伸缩臂
2.000 (78.7) 2.800 (110.2) 125 (275)
1.000 – 4.000
创新的7系列机械手臂
整合的控制箱
采用了一流集成伺服模块机械手臂,整合了自身,从而不再需要外接控制箱。 整合的控制箱配于水平轴的后面,可让出空间给注塑单元。
较大的钢制横梁使主轴承间有更宽的距离,从而使X行程更长达到900mm
W731
(35.5”), 最大 1190mm (46.9”)垂直臂行程可达1.600 mm (63”)。
W731 类似W721的垂直臂设计,但纵向行程可达1.400 mm (55”)。 由于垂直臂的较高运行速度及负荷重量可达10 kg (22 lbs), W731成为了我们针对500吨锁模力注塑机的销售明星
小斜臂说明书

上一页 下一页
结束
5.夹具部:
C型內扣環
小插蕊
滾珠軸承 爪旋組本體
旋轉小齒輪 夾具固定板
夾具固定板-2
小插蕊 夾具氣缸 夾具磁簧 夾具本體固定塊
棘輪扳手 旋轉軸
目录
返回
上一页 下一页
结束
3.手臂部(单截):
快速接頭
上護套板 上下擋板
保護鍊條
手臂結構樑
滑軌 上下氣缸 護管接頭 調速接頭 護管固定架
線性軸承 上下座
氣缸固定板 手臂下固定板
滑塊 調速接頭 緩衝氣缸
下護套板 鍊條固定板
防落氣缸架 近接開關 防落氣缸
目录
返回
上一页 下一页
结束
3.手臂部(双截):
手臂上固定板 皮帶
下行程擋板 上護套板
保護鏈條 滑軌
皮帶固定板
手臂結構樑 護管接頭
下護套板 防落氣缸 氣缸防落架 近接開關固定板 近接開關 近接開關感應片 氣缸防落擋架 旋轉氣缸安裝板 皮帶輪軸墊片
目录
返回
上一页 下一页
结束
手臂蓋板 上下氣缸
滑軌 手臂結構樑
油壓緩衝器
滑塊 上下座
皮帶夾板 線性軸承 油壓緩衝器 皮帶輪軸 皮帶輪 皮帶輪固定板 手臂下固定板 皮帶輪定位板
電源濾波器
蜂鳴器 警示燈 中繼板
電控箱
目录
返回
上一页 下一页
结束
2.基座部:
快速接頭 雙點組合 快速接頭 電纜固定頭 電纜固定頭
滾珠軸承 旋轉軸
拱
定位柱 基座
滾動軸承用螺帽 旋出角度調整架 滾動軸承用墊圈
連軸板 旋出角度調整銷 滾珠軸承 旋出入氣缸 磁簧開關 滾動軸承用螺帽 滾珠軸承 調速接頭 氣缸旋轉軸
JM863斜臂机械手控制器操作说明书说明书1要点

0708 主臂放 0709 主臂上升
2.5.2 双臂动作程式
双臂:
程式0: 主臂吸 副臂夹 移动侧
0000 产 量 0001 开模延时 0002 突模延时 0003 双臂下降
0004 双臂前进 0005 真空吸 0006 副臂夹 0007 双臂后退
0008 双臂上升 0009 双臂前进 0010 机台旋出 0011 主臂下降
0312 主臂上升 0313 机台旋入
程式4: 吸 移动侧
0400 产 量 0401 开模延时 0402 突模延时 0403 主臂下降
0404 主臂前进 0405 真空吸 0406 主臂后退 0407 主臂上升
0408 机台旋出 0409 主臂下降 0410 真空放 0411 主臂上升
0412 机台旋入
副臂前进/后退动作,再按一次,则反相动作。
副臂夹/放动作,再按一次,则反相动作。
关模动作。
ห้องสมุดไป่ตู้2.
取出成型机发生警报但确认要继续自动时,可按自动键关警报,且机械手继续动作。若发生警报时按停止键,则机械手回退到原点状态,且退出自动状态。
按键后,显示自动画面,显示如右:
自动周期:记录当前自动循环所用的时间。
1.2控制系统的安装及调试……………...………………………………….………..2
第二章按键说明……..……………………………………………………….…........3
2.1操作面板按键位置图……..………………………………………...….………....3
2.2手动状态下操作说明……..………………………………………...….………...4
斜臂机械手
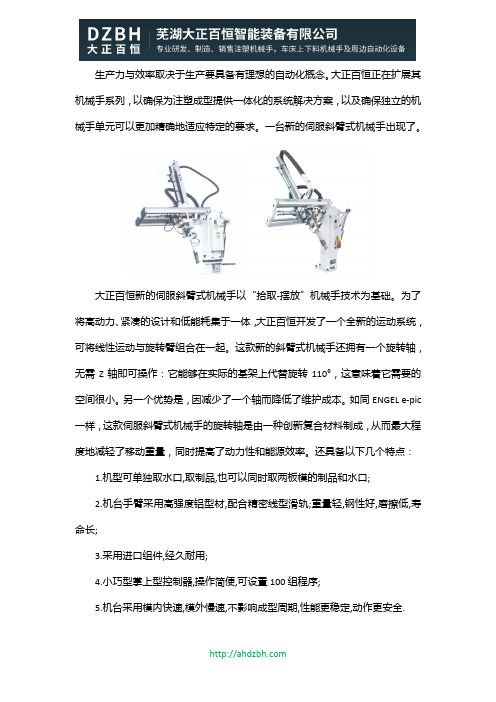
生产力与效率取决于生产要具备有理想的自动化概念。
大正百恒正在扩展其机械手系列,以确保为注塑成型提供一体化的系统解决方案,以及确保独立的机械手单元可以更加精确地适应特定的要求。
一台新的伺服斜臂式机械手出现了。
大正百恒新的伺服斜臂式机械手以“拾取-摆放”机械手技术为基础。
为了将高动力、紧凑的设计和低能耗集于一体,大正百恒开发了一个全新的运动系统,可将线性运动与旋转臂组合在一起。
这款新的斜臂式机械手还拥有一个旋转轴,无需Z轴即可操作:它能够在实际的基架上代替旋转110°,这意味着它需要的空间很小。
另一个优势是,因减少了一个轴而降低了维护成本。
如同ENGEL e-pic 一样,这款伺服斜臂式机械手的旋转轴是由一种创新复合材料制成,从而最大程度地减轻了移动重量,同时提高了动力性和能源效率。
还具备以下几个特点:1.机型可单独取水口,取制品,也可以同时取两板模的制品和水口;2.机台手臂采用高强度铝型材,配合精密线型滑轨;重量轻,钢性好,磨擦低,寿命长;3.采用进口组件,经久耐用;4.小巧型掌上型控制器,操作简便,可设置100组程序;5.机台采用模内快速,模外慢速,不影响成型周期,性能更稳定,动作更安全.芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
产品广泛适用于基础工业,汽车零部件,电子通信,环保化粪池,检查井、垃圾桶、托盘、食品包装,PET瓶坯,家电设备,光学制造等。
可调节手臂训练器使用说明

可调节手臂训练器使用说明使用说明手臂训练器是一种专为锻炼手臂力量和增加肌肉稳定性而设计的训练设备。
它能够提供可调节的阻力,帮助用户定制个性化的训练计划。
本使用说明将为您详细介绍手臂训练器的功能和正确使用方法,以确保您能够从中获得最佳的训练效果。
一、组装手臂训练器在开始使用手臂训练器之前,您需要先组装好设备。
请按照以下步骤进行操作:1. 将手臂训练器的主体部分与支架连接起来,确保连接结实可靠。
2. 根据个人需要,调整支架高度并锁定。
一般来说,刚开始使用时,较低的高度可以更好地掌握平衡。
3. 将手臂训练器的阻力调节器安装在主体部分上。
您可以根据个人的力量水平选择适当的阻力。
二、正确的姿势1. 站立或坐下,并保持身体的平衡。
双脚平行分开与肩宽相似。
2. 握住手臂训练器的手柄,双手间距适当,保持舒适。
3. 伸直你的手臂,与肩膀平齐,手掌朝下。
确保手臂与肩膀之间的夹角大约为90度。
4. 稳定身体,并保持上身直立。
避免任何剧烈的动作或摇晃。
三、使用手臂训练器1. 慢慢地屈臂,将手臂训练器的手柄向胸部拉至最大限度,同时保持手臂与肩膀平齐。
此动作重点是用手臂的力量,而不是身体的其他部分。
2. 在最大拉伸位置停留一会儿,然后缓慢地将手臂恢复到开始的位置。
这个过程应该保持平滑且稳定,避免用力过猛或过快。
3. 根据个人的需要,重复上述动作,建议每组进行10-15次,然后休息片刻。
4. 根据您的训练计划,逐渐增加每组的重复次数和训练的组数。
5. 每次训练后,确保放松肌肉并进行适当的拉伸运动,以减少可能的肌肉酸痛和伤害。
四、注意事项1. 在开始使用手臂训练器之前,建议咨询专业教练或医生的建议,以确保您的身体状况适合进行手臂训练。
2. 在使用手臂训练器时,注意保持正确的姿势和动作。
不要使用过大的阻力,以免造成肌肉拉伤或其他伤害。
3. 如果感到任何不适或疼痛,应立即停止训练,并就医咨询。
4. 定期检查手臂训练器的各部件是否正常,如有发现损坏或松动的情况,请立即修复或更换。
斜臂机械手控制手册

目录 (11)第一章系统配置及安装.................................................................................................................1.1配置及说明 (1)1.2系统的安装 (1) (33)第二章操作说明.............................................................................................................................2.1操作面板 (3)2.2停止状态 (4)2.3手动操作 (4)2.4自动操作 (5)2.5功能设定 (7)2.5.1一般功能 (7)2.5.2特殊功能 (7)2.5.3单、双臂选择 (9)2.5.4显示屏亮度调节 (9)2.6动作程序 (10)2.6.1程序选择 (10)2.6.2程序教导 (10)2.7时间修改 (11)2.8I/O信号监视 (12)2.9报警记录 (14)第三章动作程序说明................................................................................................................... (1515)3.1标准动作程序 (15)3.1.1单臂动作程序 (15)3.1.2双臂动作程序 (16)第四章报警信息及解决方法....................................................................................................... (1919) (2424)第五章接线及安装尺寸............................................................................................................... 5.1中继板输入输出接线图. (24)5.2注塑机与机械手连线图 (25)5.3中继板安装尺寸图 (26)5.4操作面板尺寸图 (27)5.5开关电源安装尺寸 (28)第一章系统配置及安装1.1配置及说明1.彩色显示部分:(一套)1)手控板2)按键板3)液晶2.主机部分:(一套)1)中继(I/O)板3.电源部分:(一套)1)开关电源4.其它1)37芯线一根2)蜂鸣器一个1.2系统的安装1、配线作业必须由专业电工进行。
名称小斜臂机械手要点

*8.4“真彩触摸屏,美观大方,有屏幕延时自动保护功能。
能满足各种特殊动作,如排列,堆放,埋入等功能。
*可自动侦测故障情况并显示幕面并自动记录。
ARH中型系列适用于100-650吨的各型卧式射出成型的成品及水口取出。手臂型式为双截式;可增加副臂用于三板模,同时夹成品与料头;上下行程1000/1100/1200。模行轴标准为变频马达驱动,可选购AC伺服马达驱动。上下、引拔为气缸驱动,经济实用,提高模内的取出效率。
特点:
*机体结构
横行、上下手臂均使用进口的高刚性线性滑轨。引拔及上下使用质量轻高刚性的铝合金挤型梁,达到取出速度快、高效能、震动小、使用寿命长的要求。手臂为双截结构的采用皮带倍机构,大大缩短手臂高度,提高手手臂高度,提高臂速度和稳定性,更适合厂房比较低的场院合。
*控制系统简单,容易操作。
8组固定程式,20组教导程式,完全符合任何需要。
可外接输出点,控制输送带、承接台或是喷离型剂装置。
自动侦测故障情况,显示于幕面,并自动记录故障码。
*上下手臂由铝合金结构梁及使用寿命长等特点。
*双截式倍速机械手臂(特定型号)使用皮带倍速机构,使得手臂速度快、震动小、耐磨性强。
*侧姿机构可配合公模或母模的产品取出,固定旋转90。
*控制系统简单,容易操作;8组;固定程式,20组教导程式;可外接输出点,控制输送带、承接台或是喷离型剂装置;模组化设计,更换维修方便,抗干扰能力强。
*根据驱动方式不同,有气动、变频电机、伺服电机以供选择。
名称:中型横走机械手
所属类别:机械手系列
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
蜂鳴器 警示燈 中繼板
電控箱
目录
返回
上一页 下一页
结束
2.基座部:
快速接頭 雙點組合 快速接頭 電纜固定頭 電纜固定頭
滾珠軸承 旋轉軸
拱
定位柱 基座
滾動軸承用螺帽 旋出角度調整架 滾動軸承用墊圈
連軸板 旋出角度調整銷 滾珠軸承 旋出入氣缸 磁簧開關 滾動軸承用螺帽 滾珠軸承 調速接頭 氣缸旋轉軸
3. 機械手臂說明 3.1機械手臂說明 3.2機械手規格 3.3外型尺寸 3.4各部件爆炸圖
4. 開機前設定與調整 4.1射出機連接(CE選購配件)
下一页
4.2氣源連結 4.3開啟電源程序 4.4換模校機調整 4.5夾治具調整與安裝 4.6工作速度調整 5. 維護保養 5.1維修安全 5.2保養檢查項目和週期 5.3維修保養工具總表 5.4潤滑 6. 氣壓迴路圖 7. 控制系統 7.1電源系統圖 7.2接地系統圖 7.3緊急停止迴路圖 7.4輸出/輸入點說明圖 7.5GA28-PC2接頭定義及說明 7.6CN6:連線射出機 7.7電纜線編號及定義
當機械手允許射出機頂針前進時,則接點閉合,而頂針的控制請參閱3-6頁說 明
目录
返回
上一页 下一页
结束
3.机械手臂说明:
6.气阀箱部 4.引拔部
8.治具组
7.操作器
单截 3.手臂部
双截
2.基座部 1.电控部
5.夹具部
目录
Hale Waihona Puke 返回上一页 下一页
结束
1.电控部:
電源供應器固定板 電源供應器 電源開關 風扇
返回
上一页 下一页
结束
5.夹具部:
C型內扣環
小插蕊
滾珠軸承 爪旋組本體
旋轉小齒輪 夾具固定板
夾具固定板-2
小插蕊 夾具氣缸 夾具磁簧 夾具本體固定塊
當射出機開模位置等於取物需要的位置時,此接點必須閉。而不注意改變了模 子打開的行程比機械手取物需要的位置還小時,此情況必須不可能發生。
接點必須保持閉合,並且不可因為改變了射出機操作模式或將安全防護裝置( 如安全門)打開而中斷此信號。
當射出機安全裝置(例如:安全門、防護安全設備、腳踏板安全設備......等) 動作時,此接點必須閉合,也因此機械手可能有危險動作。而此信號在任 何操作模式下均須動作。根據EN201規定,模區安全裝置信號接點必須使 用極限開關系列,並且電流容量不可超過6A。
此點為機械手輸入點共同電位其代號L-。
當機械手模內取物成功上行至上位信號(LS1)時,則此接點閉合以允許射出 機開始關模。而機械手在動作中發生警報時將使關模動作中斷。
動作情況同NO.18,26允許關模(MAF)
當按下機械手操作器上的紅色緊急停止按鈕時,此接點必須打開(參閱 EN60204-1),並控制射出機緊急停止。
Phoenix系列说明书
旋臂式机械手
(包括GA-28控制) 版本:亚洲中文版 東莞艾爾發自動化機械有限公司
开始
目录
1. 安全規範 1.1安全描述 1.2保證與非保證
2. 安裝 2.1搬運 2.2安裝尺寸 2.3防護區域 2.4噪音水準測試表 2.5射出機連結 2.6氣源連結 2.7連結安全、功能測試 2.8拆除機械手步驟
棘輪扳手 旋轉軸
目录
返回
上一页 下一页
结束
3.手臂部(单截):
快速接頭
上護套板 上下擋板
保護鍊條
手臂結構樑
滑軌 上下氣缸 護管接頭 調速接頭 護管固定架
線性軸承 上下座
氣缸固定板 手臂下固定板
滑塊 調速接頭 緩衝氣缸
下護套板 鍊條固定板
防落氣缸架 近接開關 防落氣缸
目录
返回
上一页 下一页
结束
3.手臂部(双截):
4.引拔部(单截):
引引引 拔拔拔 封導氣 板桿缸
調油引 速壓拔 接緩氣 頭 衝缸
器固 定 板
引環 拔首 擋螺 板栓
引引 拔拔 座臂
目录
返回
上一页 下一页
结束
4.引拔部(双截):
引 拔 氣 缸
引 拔 氣 缸
導
杆
引
拔
座
環 首
固
螺
定
栓
螺
絲
引
引 拔 封 板
拔
油
汽
壓
缸
緩
固
衝
定
器
座
引
拔
引擋 拔板
上
臂
下
座
目录
手臂上固定板 皮帶
下行程擋板 上護套板
保護鏈條 滑軌
皮帶固定板
手臂結構樑 護管接頭
下護套板 防落氣缸 氣缸防落架 近接開關固定板 近接開關 近接開關感應片 氣缸防落擋架 旋轉氣缸安裝板 皮帶輪軸墊片
目录
返回
上一页 下一页
结束
手臂蓋板 上下氣缸
滑軌 手臂結構樑
油壓緩衝器
滑塊 上下座
皮帶夾板 線性軸承 油壓緩衝器 皮帶輪軸 皮帶輪 皮帶輪固定板 手臂下固定板 皮帶輪定位板
信號名稱
歐規接點 編 號
射出機緊急停止
1
(ESM)
開模終止(MOP) 2
射出機安全裝置
3
(SDM)
參考電位 (L-)
允許關模 (MAF)
循環啟動 (EMC)
機械手緊急停止 (ESR)
允許頂針前進 (EEF)
16,9,11 18,26 17,32 19,27 22,32
說明
當射出機緊急停止裝置被動作時(參閱EN60204-1),則此接點必須打開,當 打開此開關接點時,將使機械手緊急停止。
结束
目录
7.8控制板GA28配置圖 (RBD-GA28-PC3) 7.9按鍵板GA28-PC1配置圖 (RBD-GA28-PC1) 7.10中繼板GA28-PC2配置圖 (RBD-GA28-PC2) 7.11PC板JUMP說明 8. 操作組織圖 8.1操作組織圖(1) 8.2操作組織圖(2) 8.3固定模式說明 9. 計時與計數說明 9.1時間定義 9.2計數定義 10. 模式操作說明 10.1模式操作說明 10.2自動/啟動-自動運轉模式 10.3單循環 10.4計時 10.5計數 10.6輸送帶/噴霧 11. 手動模式操作說明
结束
2.5 射出機連結 標準機型無接頭,直接接入射出成型機,當不使用機械手時,請直接關機械手臂之電源,則自
動復歸,機械手不控制射出機;當關掉電源仍然無法復歸時,請通知本公司或代理商。
2.5.1歐規接頭接點配置圖(選購)
目录
返回
上一页 下一页
结束
2.5.2接點說明
接點編號
GA28-PC2
3 1
2
4 5,6 7,8 11,12 9,10
上一页
11.1手動 11.2輸入 11.3功能 11.4故障記錄 11.5鎖檔 11.6機械臂不使用 12. 模式 12.1模式 12.2教導 12.3計時數 12.4計數 12.5輸送帶/噴霧 12.6記憶 12.7記憶完成 13. 歸零 14. 警報及故障排除
14.1警報錯誤碼說明 14.2警告訊號碼說明 14.4警報故障排除流程圖