单片机仿真50例说明
单片机C语言程序设计实训100例

//恢复定时器 1 初值 //500ms 转换状态
名称:10s 的秒表 说明:首次按键计时开始,再次按键暂停,第三次按键清零。
*/ #include<reg51.h> #define uchar unsigned char #define uint unsigned int sbit K1=P3^7; uchar i,Second_Counts,Key_Flag_Idx; bit Key_State; uchar
34 上海师范大学信息与机电工程学院—倪继锋
《单片机 C 语言程序设计实训 100 例---基于 8051 和 PROTEUS 仿真》案例
34 /*
100 000s 以内的计时程序 名称:100 000s 以内的计时程序 说明:在 6 只数码管上完成 0~99 999.9s。
*/ #include<reg51.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int //段码 ucha 中断函数 void LED_Flash_and_Scroll() interrupt 1 { if(++k<35) return; //定时中断若干次后执行闪烁 k=0; switch(i) { case 0: B1=~B1;break; case 1: G1=~G1;break; case 2: R1=~R1;break; case 3: Y1=~Y1;break; default:i=0; } if(++j<300) return; //每次闪烁持续一段时间 j=0; P0=0xff; //关闭显示 i++; //切换到下一个 LED } 30 /* T0 控制 LED 实现二进制计数
单片机代码例子
单片机代码例子
单片机是一种集成电路,具有微处理器、存储器和各种输入输出接口,可用于控制各种电子设备。
下面是一些单片机代码例子:
1. LED闪烁:通过控制IO口的高低电平,使LED灯交替闪烁,实现简单的呼吸灯效果。
2. 温度测量:利用温度传感器采集环境温度,并将温度值转换为数字信号,通过串口输出或显示在LCD屏幕上。
3. 红外遥控:通过接收红外信号,并解码得到对应的遥控指令,实现对电视、空调等家电的遥控操作。
4. 超声波测距:利用超声波传感器发射超声波,并接收反射回来的信号,通过计算时间差来测量到障碍物的距离。
5. 矩阵键盘输入:通过矩阵键盘将按键输入转换为数字或字符信息,并进行相应的处理和反馈。
6. 电机控制:通过PWM技术控制直流电机的转速和方向,实现电机的正转、反转和变速等操作。
7. 温湿度监测:利用温湿度传感器采集环境的温度和湿度值,并将数据通过无线通信模块传输到上位机进行实时监测。
8. 蜂鸣器控制:通过控制IO口输出高低电平,实现蜂鸣器的开关
和不同音调的发声。
9. 光线感应:利用光敏电阻或光电二极管检测环境光线强度,并根据光线强度的变化做出相应的控制。
10. 电子钟:通过RTC模块获取当前的时间,并在LCD屏幕上显示或通过蜂鸣器报时。
以上是一些常见的单片机代码例子,涵盖了单片机在各个领域的应用。
通过编写这些代码,可以深入理解单片机的工作原理和应用技巧,为后续的项目开发打下基础。
当然,这只是冰山一角,单片机的应用领域非常广泛,还有许多其他有趣的项目等待我们去探索。
单片机程序100范例+详细注释

100例程序设计范例汇总第一章 (4)【实例1】使用累加器进行简单加法运算: (4)【实例2】使用B寄存器进行简单乘法运算: (4)【实例3】通过设置RS1,RS0选择工作寄存器区1: (4)【实例4】使用数据指针DPTR访问外部数据数据存储器: (4)【实例5】使用程序计数器PC查表: (4)【实例6】IF语句实例: (4)【实例7】SWITCH-CASE语句实例: (4)【实例8】FOR语句实例: (4)【实例9】WHILE语句实例: (5)【实例10】DO...WHILE语句实例: . (5)【实例11】语句形式调用实例: (5)【实例12】表达式形式调用实例: (5)【实例13】以函数的参数形式调用实例: (5)【实例14】函数的声明实例: (5)【实例15】函数递归调用的简单实例: (5)【实例16】数组的实例: (6)【实例17】指针的实例: (6)【实例18】数组与指针实例: (6)【实例19】P1口控制直流电动机实例 (6)第二章 (8)【实例20】用74LS165实现串口扩展并行输入口 (8)【实例21】用74LS164实现串口扩展并行输出口 (10)【实例22】P0I/O扩展并行输入口 (12)【实例23】P0I/O扩展并行输出口 (12)【实例24】用8243扩展I/O端口 (12)【实例25】用8255A扩展I/O口 (14)【实例26】用8155扩展I/O口 (19)第三章 (26)【实例29】与AT24系列EEPROM接口及驱动程序 (26)【实例30】EEPROM(X5045)接口及驱动程序 (30)【实例31】与铁电存储器接口及驱动程序 (33)【实例32】与双口RAM存储器接口及应用实例 (35)【实例33】与NANDFLASH(K9F5608)接口及驱动程序 (35)第四章 (43)【实例34】独立键盘控制 (43)【实例35】矩阵式键盘控制 (44)【实例36】改进型I/O端口键盘 (46)【实例37】PS/2键盘的控制 (49)【实例39】段数码管(HD7929)显示实例 (54)【实例40】16×2字符型液晶显示实例 (55)【实例41】点阵型液晶显示实例 (61)【实例42】LCD显示图片实例 (63)第五章 (70)【实例43】简易电子琴的设计 (70)【实例44】基于MCS-51单片机的四路抢答器 (71)【实例45】电子调光灯的制作 (76)【实例46】数码管时钟的制作 (81)【实例47】LCD时钟的制作 (96)【实例48】数字化语音存储与回放 (103)【实例49】电子标签设计 (112)第六章 (120)【实例50】指纹识别模块 (121)【实例51】数字温度传感器 (121)第七章 (124)【实例53】超声波测距 (124)【实例54】数字气压计 (125)【实例55】基于单片机的电压表设计 (132)【实例56】基于单片机的称重显示仪表设计 (133)【实例57】基于单片机的车轮测速系统 (136)第八章 (138)【实例58】电源切换控制 (138)【实例59】步进电机控制 (140)【实例60】单片机控制自动门系统 (141)【实例61】控制微型打印机 (144)【实例62】单片机控制的EPSON微型打印头 (144)【实例63】简易智能电动车 (145)【实例64】洗衣机控制器 (149)第九章 (152)【实例65】串行A/D转换 (152)【实例66】并行A/D转换 (153)【实例67】模拟比较器实现A/D转换 (154)【实例68】串行D/A转换 (155)【实例69】并行电压型D/A转换 (156)【实例70】并行电流型D/A转换 (156)【实例71】2I C接口的A/D转换 (157)【实例72】2I C接口的D/A转换 (161)【实例73】单片机间双机通信 (164)【实例74】单片机间多机通信方法之一 (166)【实例75】单片机间多机通信方法之二 (171)【实例76】PC与单片机通信 (176)【实例77】红外通信接口 (178)第十一章 (180)【实例79】单片机实现PWM信号输出 (180)【实例80】实现基于单片机的低频信号发生器 (182)【实例81】软件滤波方法 (183)【实例82】FSK信号解码接收 (186)【实例83】单片机浮点数运算实现 (187)【实例84】神经网络在单片机中的实现 (192)【实例85】信号数据的FFT变换 (194)第十二章 (198)【实例86】2I C总线接口的软件实现 (198)【实例87】SPI总线接口的软件实现 (200)【实例88】1-WIRE总线接口的软件实现 (205)【实例89】单片机外挂CAN总线接口 (207)【实例90】单片机外挂USB总线接口 (210)【实例91】单片机实现以太网接口 (214)【实例92】单片机控制GPRS传输 (221)【实例93】单片机实现TCP/IP协议 (223)第十三章 (229)【实例94】读写U盘 (229)【实例95】非接触IC卡读写 (234)【实例96】SD卡读写 (238)【实例97】高精度实时时钟芯片的应用 (242)第十四章 (247)【实例98】智能手机充电器设计 (247)【实例99】单片机控制门禁系统 (248)第一章【实例1】使用累加器进行简单加法运算:MOV A,#02H ;A←2ADD A,#06H ;A←A+06H【实例2】使用B寄存器进行简单乘法运算:MOV A,#02H ; A←2MOV B,#06H ; B←6MUL AB ; BA←A*B=6*2【实例3】通过设置RS1,RS0选择工作寄存器区1:CLR PSW.4 ; PSW.4←0SETB PSW.5 ; PSW.5←1【实例4】使用数据指针DPTR访问外部数据数据存储器:MOV DPTR, #data16 ; DPTR←data16MOVX A, @ DPTR ; A←((DPTR))MOVX @ DPTR, A ; (DPTR)←A【实例5】使用程序计数器PC查表:MOV A, #data ;A←dataMOVC A, @ A+DPTR ; PC←(PC)+1 ,A←((A)+(PC)) 【实例6】if语句实例:void main(){ int a,b,c,min;printf("\n please input three number:");scanf("%d%d%d ",&a,&b,&c);if(a<b&&a<c) printf("min=%d\n",a );else if(b<a&&b<c) printf("min=%d\n",b);else if(c<a&&c<c) printf("min=%d\n",c);else printf("There at least two numbers are equal\n");}【实例7】switch-case语句实例:void main(){ int num; printf("input one number:");scanf("%d",& num);switch(num){ case 1: printf("num =%d\n", num);break;case 2: printf("num =%d\n", num);break;case 3: printf("num =%d\n", num);break;case 4: printf("num =%d\n", num);break;default: printf("The number is out of the range\n", num);}}【实例8】for语句实例:void main(){ for(int a=10;n>0;a --)printf("%d",a);}【实例9】while语句实例:void main(){ int i=0;while(i<=10) i++;}【实例10】do…while语句实例:void main(){ int i=0;do{ i++;}while(i<=10);}【实例11】语句形式调用实例:void main(){ int i=0; while(i<=10) i++; ……Sum(); /*函数调用*/}【实例12】表达式形式调用实例:void main(){ int a,b,i=0; while(i<=10) i++; ……i=4*Sum(a,b); /*函数调用*/}【实例13】以函数的参数形式调用实例:void main(){ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例14】函数的声明实例:void main(){ int max(int x,int y); /*函数的声明*/ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例15】函数递归调用的简单实例:void fun(){ int a=1, result,i;for(i=0;i<10;){ i=a+I;result = fun(); /*函数调用*/}return result;}【实例16】数组的实例:void main(){ char num[3] [3]={{ '','#',''},{'#','','#'},{'','#',''}}; /*定义多维数组*/ int i=0,j=0;for(;i<3;i++){ for(;j<3;j++) printf(“%c”,num[i][j]);printf(“/n”);}【实例17】指针的实例:void main(){ int a=3,*p;p=&a; /*将变量a的地址赋值给指针变量p*/printf(“%d,%d”,a,*p); /*输出二者的数值进行对比*/}【实例18】数组与指针实例:void main(){ int i=3,num[3]={1,2,3},*p;p=num; /*将数组num[]的地址赋值给指针变量p*/result =max(p,3); /*函数调用,计算数组的最大值*/}【实例19】P1口控制直流电动机实例sfr p1=0x90;sbit p10=p1^0;sbit p11=p1^1;void main (){int i, m;int j=100;int k=20;// 正快转for (i=0; i<100; i++){P10=1;for (j=0; j<50; j++){m=0;}}P10=0;for (j=0; j<10; j++){m=0}//正慢转for (i=0; i<100; i++) {P10=1;for (j=0; j<10; j++) {m=0}}p10=0;for (j=0; j<50; j++) {m=0}// 负快转for (i=0; i<100; i++) {p11=1;for (j=0; j<50; j++) {m=0;}}p11=0;for (j=0; j<10; j++) {m=0;}// 负慢转for (i=0; i<100; i++) {p11=1;for (j=0;j<10;j++) {m=0;}}p11=0for (j=0; j<50; j++) {m=0;}}第二章【实例20】用74LS165实现串口扩展并行输入口(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit LOAD=P1^7;//用P1^7控制SH/ 管脚(2)串口初始化函数UART_init()//-------------------------------------------------------------------------------------------------------------- // 函数名称:UART_init()// 功能说明:串口初始化,设定串口工作在方式0//-------------------------------------------------------------------------------------------------------------- void UART_init(void){SCON=0x10;//设串行口方式0,允许接收,启动接收过程ES=0;//禁止串口中断}(3)数据接收函数PA()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PA()// 输入参数:无// 输出参数:返回由并口输入的数据// 功能说明:接收八位串行数据//-------------------------------------------------------------------------------------------------------------- unsigned char PA(void){unsigned char PA_data;LOAD=0;//当P1.7输出低电平,74LS165将并行数据装入寄存器//当中LOAD=1;//当P1.7输出高电平,74LS165在时钟信号下进行移位UART_init();//74LS165工作在时钟控制下的串行移位状态while(RI==0);//循环等待RI=0;PA_data=SBUF;return PA_data;//返回并行输入的数据}(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit a7=ACC^7;sbit simuseri_CLK=P1^6;//用P1^6模拟串口时钟sbit simuseri_DATA=P1^5;//用P1^5模拟串口数据sbit drive74165_LD=P1^7;//用P1^7控制SH/ 管脚(2)数据输入函数in_simuseri()//-------------------------------------------------------------------------------------------------------------- // 函数名称:in_simuseri()// 输入参数:无// 输出参数:data_buf// 功能说明:8位同位移位寄存器,将simuseri_DATA串行输入的数据按从低位到// 高位// 保存到data_buf//-------------------------------------------------------------------------------------------------------------- unsigned char in_simuseri(void){unsigned char i;unsigned char data_buf;i=8;do{ACC=ACC>>1;for(;simuseri_CLK==0;);a7= simuseri_DA TA;for(;simuseri_CLK==1;);}while(--i!=0);simuseri_CLK=0;data_buf=ACC;return(data_buf);}(3)数据输出函数PAs()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PAs()// 输入参数:无// 输出参数:PAs _buf,返回并行输入74LS165的数据// 功能说明:直接调用,即可读取并行输入74LS165的数据,不需要考虑74LS165的// 工作原理//--------------------------------------------------------------------------------------------------------------unsigned char PAs(void){unsigned char PAs_buf;drive74165_LD=0;drive74165_LD=1;PAs_buf= in_simuseri();return(PAs_buf);}【实例21】用74LS164实现串口扩展并行输出口单片机串口驱动74LS164的程序主要包括函数声明管脚定义部分、串口初始化函数以及数据发送函数。
51单片机仿真实例
51单片机仿真实例l示例6—扫描与判断—(单端口)位扫描与字节(多端口)扫描这是一个常用程序段—子程序—标准程序,通过端口扫描而获得输入数据或控制输出数据,达到节省位或字节的目的—节约硬件资源。
关于扫描,可以从位及其取反实现流水灯着手来理解。
可以通过移位实现流水灯—扫描。
可以通过字节数据(01H,02H,04H,08H,10H,20H,40H,80H—阳极管)的端口发送实现流水灯—扫描。
可以通过数据表(DB01H,02H,04H,08H,10H,20H,40H,80H—阴极管)实现流水灯—扫描。
可以通过循环跳转实现流水灯—扫描。
扫描注意入比出查—获得输入要比较数据、发送输出要检查出口扫描获取端口字节扫描输出位移动产生动态效果(01、02、04、08、10、20、40、80),可以用字节表扫描输出字符字节,通过延时可以变换字符以便造成数字进位效果ORG 0000HSTART:dbufequ30h;置存储区首址tempequ40h;置缓冲区首址org 00hmov 30h,#2 ;存入数据mov 31h,#0mov 32h,#1mov 33h,#0mov 34h,#7mov 35h,#1mov r0,#dbufmov r1,#tempmov r2,#6;六位显示器mov dptr,#segtab ;段码表首地址dp00:mov a,@r0;取要显示的数据movc a,@a+dptr ;查表取段码mov @r1,a;段码暂存inc r1inc r0djnz r2,dp00disp0:mov r0,#temp;显示子程序mov r1,#6;扫描6次mov r2,#01h;从第一位开始dp01:mov a,@r0mov p2,a;段码输出mov a,r2 ;取位码mov p1,a;位码输出acall delay;调用延时mov a,r2rl amov r2,ainc r0djnz r1,dp01sjmp disp0segtab:db 0C0H,0F9H,0A4H,0B0H,99H,92H;共阳极管db 82H,0F8H,80H,90H,88H,88H,83Hdelay:mov r4,#29h;延时子程序aa1:mov r5,0ffhaa:djnz r5,aadjnz r4,aa1retend************************************************* ***********************还可以用其他程序形式进行扫描,像循环、递增或递减判断程序等。
单片机在工业控制系统中的应用案例

单片机在工业控制系统中的应用案例工业控制系统是现代工业生产中不可或缺的一部分,它通过对生产过程的监测、控制和调节,提高生产效率、保证产品质量,降低人力成本。
而在工业控制系统中,单片机作为一种重要的核心控制组件,发挥着重要的作用。
本文将通过介绍几个实际的应用案例,来阐述单片机在工业控制系统中的应用。
案例一:温度控制系统在许多工业生产过程中,温度是一个重要的参数。
例如,化工、制药、食品加工等行业都需要严格控制温度。
单片机可以通过接收温度传感器的反馈信号,实时检测温度,并根据设定的温度范围进行控制。
通过控制加热或制冷设备,单片机可以精确调节温度,并保持在所需的范围内。
这种温度控制系统可以大大提高生产过程的稳定性和准确性。
案例二:流量控制系统在涉及到流体控制的工业过程中,流量控制是非常重要的。
例如,水处理、油气管道、风机控制等领域都需要准确控制流量。
单片机可以通过读取流量传感器的信号,实时监测流体的流量,并根据设定的目标值,通过控制阀门或泵,实现精确的流量控制。
这种流量控制系统可以确保流量稳定,同时减少能源消耗和资金成本。
案例三:速度控制系统在许多工业设备中,例如电机、输送带、机械手等,需要精确的速度控制。
单片机可以通过接收速度传感器的信号,实时监测设备的运行速度,并根据设定的速度要求,通过控制电机或变频器,实现精确的速度控制。
这种速度控制系统可以提高设备的运行效率,减少能源消耗,并保护设备免受过载和损坏。
案例四:定时控制系统在一些周期性的工业生产过程中,例如轨道交通信号系统、灯光控制系统等,需要按照特定的时间模式进行控制。
单片机可以通过内置的计时器和时钟模块,实现精确的定时控制。
它可以根据预设的时间表,自动进行任务的开启和关闭,从而实现智能化的定时控制,提高生产效率和安全性。
综上所述,单片机在工业控制系统中的应用是多种多样的,涵盖了温度控制、流量控制、速度控制、定时控制等多个方面。
通过合理利用单片机的功能,并与其他传感器、执行器等设备结合,可以实现精确、稳定、智能的工业生产控制。
单片机仿真实例
#include<reg51.h>
#include<intrins.h>
#defineucharunsignedchar
#defineuintunsignedint
//延时
voidDelayMS(uintx)
{
uchari;
while(x--)
{
for(i=0;i<120;i++);
}
}
//主程序
while(x--)
{
for(i=0;i<120;i++);
}
}
//主程序
voidmain()
0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff,
0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,
0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,
0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,
P2=0x01;
while(1)
{
for(i=0;i<7;i++)
{
P2=_crol_(P2,1);//P2的值向左循环移动
DelayMS(150);
}
for(i=0;i<7;i++)
单片机c语言程序设计实例100例--基于805i+proteus仿真
以下是一个基于8051单片机和Proteus仿真环境的C语言程序设计实例:实例1:点亮LED灯
在这个例子中,我们将使用C语言编写一个简单的程序来控制8051单片机的一个I/O引脚,使其驱动一个LED灯。
c代码:
要使用Proteus进行仿真,你需要按照以下步骤操作:
1. 打开Proteus软件,创建一个新的设计工程。
2. 在元件库中搜索并添加相应的8051单片机型号(如AT89C51)和LED 元件到工作区。
3. 根据实际硬件连接,正确配置单片机的引脚和LED的连接。
4. 右键单击单片机元件,选择“Edit Component”打开编辑窗口。
5. 在“Program File(s)”区域,点击右侧的浏览按钮,选择你的C语言源文件(如上述的main.c)。
6. 点击“OK”关闭编辑窗口,然后点击工具栏上的“Play”按钮开始仿真。
在仿真过程中,你应该能看到LED灯被点亮,这表明你的C语言程序已经在Proteus环境中成功运行。
以上只是一个基础的例子,实际的"单片机C语言程序设计实例100例--基于8051+Proteus仿真"会包含更复杂和多样化的应用场景,包括定时器/计数器
应用、中断处理、串口通信、ADC/DAC转换、液晶显示等等。
每个实例都会详细介绍程序设计思路、代码实现以及如何在Proteus中进行仿真调试。
通过这些实例的学习和实践,你可以逐步掌握8051单片机的C语言编程技巧和Proteus仿真环境的使用方法。
单片机汇编语言入门实例
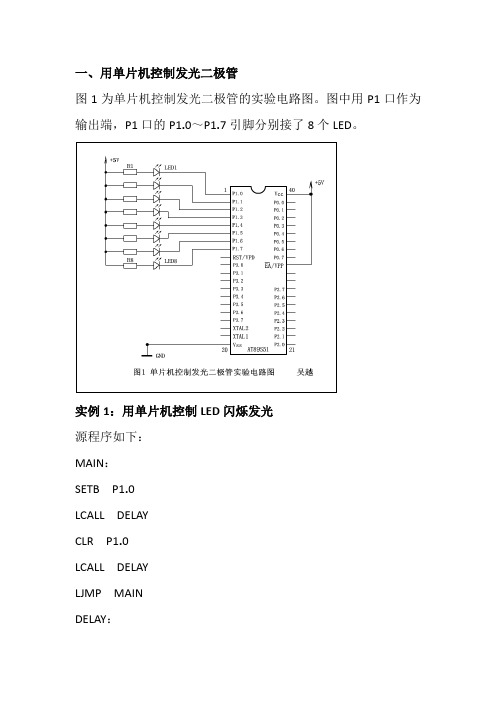
一、用单片机控制发光二极管图1为单片机控制发光二极管的实验电路图。
图中用P1口作为输出端,P1口的P1.0~P1.7引脚分别接了8个LED。
实例1:用单片机控制LED闪烁发光源程序如下:MAIN:SETB P1.0LCALL DELAYCLR P1.0LCALL DELAYLJMP MAINDELAY:MOV R7,#250D1:MOV R6,#250D2:DJNZ R6,D2DJNZ R7,D1RETEND程序说明:1、SETB P1.0:将P1.0口置“1”,既让P1.0输出高电平,让LED 熄灭。
2、LCALL DELAY:LCALL称为子程序调用指令,指令后面的参数DELAY是一个标号,用于标识第6行程序,执行LCALL指令时,程序转到LCALL后面的标号所指示的程序行处执行,如果执行指令过程中遇到RET指令,则程序就返回到LCALL指令下面的一条指令继续执行。
3、CLR P1.0:将P1.0口置“0”,既让P1.0输出低电平,让LED 亮。
4、LCALL DELAY:调用延时子程序DELAY。
5、LJMP MAIN:跳转到第1条指令处执行第1条指令。
6、第6~10条指令是一段延时子程序,子程序只能在被调用时运行,并有固定的结束指令RET。
7、END:不是S51单片机的指令,不会产生单片机可执行的代码,而是用于告诉汇编软件“程序到此结束”,这类用于汇编软件控制的指令称为“伪指令”。
延时程序说明:1、程序中的R6、R7代表工作寄存器的单元,用来暂时存放一些数据。
2、MOV指令的含义是传递数据。
指令“MOV R7,#250”的含义是:将数据250送到R7中。
250前面的“#”号表示250是一个数,而不是一个地址,“#”号后面的数称为立即数。
3、DJNZ指令后面有两个符号,一个是R6,一个是D2。
R6是寄存器,D2是标号。
DJNZ指令的执行过程是:将其后面第一个参数中的值减1,然后看这个值是否等于0,如果等于0,往下执行,如果不等于0,则转移到第二个参数所指定的位置去执行,这里是转移到由D2所标识的这条语句去执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《单片机实验仿真50例》说明
《单片机原理与控制技术》(第3版)和《单片机学习指导及习题解答》(第2版)已经出版,该书封面广告词中有一句“免费下载仿真DSN文件和hex文件”。
《单片机实验仿真50例》即为与该二本书配套的Proteus仿真文件包,50例全部取自于二本书中例题和习题。
但仅提供仿真电路DSN文件和驱动程序hex文件,没有源程序(源程序印在书上)。
读者从网上免费下载后,可对照书中程序,边学边练。
文件包共分8章50例(不计一题多解),每章用一个大文件夹,大文件夹中包含若干子文件夹。
每个子文件夹即为一个仿真题目,取一简明名称,体现其内容和功能。
子文件夹中,包含一个DSN文件、若干hex文件和一个调试提示。
hex文件分两类:一类是汇编程序形成的hex文件,用“×××asm.hex”表示;另一类是C51程序形成的hex文件,用“×××c.hex”表示。
其中,“×××”通常用“例×-×”或“习题×-×”表示,以表明其在书中的位置,便于读者查照。
有的题目还一题多解,有几个同类hex文件。
“例×-×”程序在《单片机原理与控制技术》(第3版)中,“习题×-×”程序在与教材书配套的《单片机学习指导及习题解答》(第2版)中。
为帮助读者操作,每一题均附有调试提示。
一般给出原理电路图,少量解释和调试操作步骤。
除标题按目录标示,题号、图号仍沿用书中原题号、图号,以便读者查照。
为便于读者观察仿真运行效果,有的题目增加了原书中没有的显示电路和显示程序,增加部分程序均在调试提示中给出。
需要注意的是,原书为节省版面,有的程序在调用前面已用过的子程序时,没有将子程序同时刊出(例如延时程序),读者在自行输入程序并Keil调试时,必须同时补充输入该子程序,否则编译器会提示出错。
仿真运行方法和步骤:打开DSN文件(须事先下载安装Proteus7.6以上软件),若运行已经装入的hex文件,可直接左键单击全速运行按钮;若需运行子文件夹中其它hex文件,可左键双击仿真电路图中A T89C51,选择处于同一文件夹中的其它hex文件,再全速运行。
张志良。