Rosenblatt感知器
感知器算法原理

感知器算法原理
感知器算法是一种人工神经网络的算法,它的主要原理是通过学习一
组样本数据,来预测新数据的类别。
感知器算法最早由Frank Rosenblatt在1957年提出,它是一种二元线性分类器,它的输入为
一组实数,输出为0或1。
感知器算法的工作原理非常简单,它将输入向量与一组权重系数进行
内积计算,并将结果与一个阈值进行比较。
如果结果大于阈值,则输
出为1,否则输出为0。
如果感知器的输出与实际输出不一致,那么算法就会根据误差进行权重的调整,直到误差收敛或达到预设的最大迭
代次数。
感知器算法的收敛性是有保证的,如果数据是线性可分的,那么感知
器算法一定能够找到一个最优的线性分类超平面,使得样本分类正确。
但如果数据是非线性可分的,那么感知器算法可能无法收敛。
感知器算法有一些缺点,比如它只能处理线性可分的数据,可能会牺
牲一些分类精度,对于高维数据来说,它需要大量的计算和存储资源,而且对于非平衡数据集来说,它可能会产生误导性的结果。
为了克服
这些缺点,人们提出了许多改进的感知器算法,比如多层感知器、支
持向量机、Adaboost等,这些算法可以更好地处理非线性数据,提
高分类精度。
总的来说,感知器算法是一种简单而有效的分类算法,它的原理易于理解,实现也比较简单,但在现实应用中需要注意其局限性。
在选择分类算法时,需要根据具体的数据特征和需求来选择合适的算法。
感知器神经网络
感知器神经网络感知器是一种前馈人工神经网络,是人工神经网络中的一种典型结构。
感知器具有分层结构,信息从输入层进入网络,逐层向前传递至输出层。
根据感知器神经元变换函数、隐层数以及权值调整规则的不同,可以形成具有各种功能特点的人工神经网络。
本节将介绍单层感知器和多层感知器的工作原理。
5.3.1单层感知器1958年,美国心理学家Frank Rosenblatt 提出一种具有单层计算单元的神经网络,称为Perceptron ,即感知器。
感知器是模拟人的视觉接受环境信息,并由神经冲动进行信息传递的层次型神经网络。
感知器研究中首次提出了自组织、自学习的思想,而且对所能解决的问题存在着收敛算法,并能从数学上严格证明,因而对神经网络研究起了重要推动作用。
单层感知器的结构与功能都非常简单,以至于在解决实际问题时很少采用,但由于它在神经网络研究中具有重要意义,是研究其它网络的基础,而且较易学习和理解,适合于作为学习神经网络的起点。
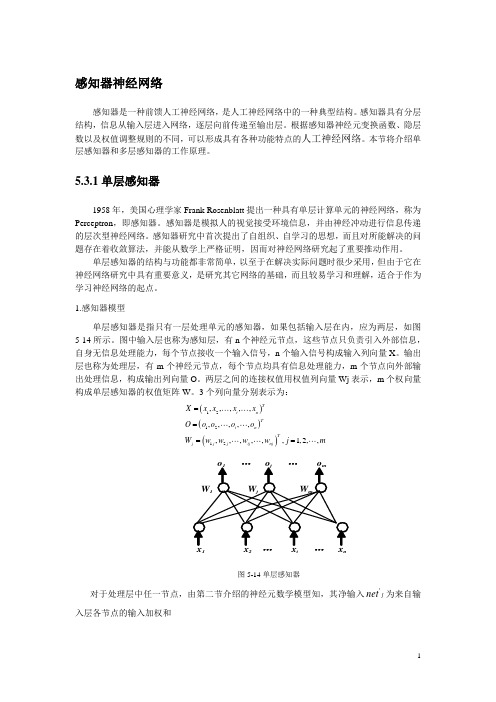
1.感知器模型单层感知器是指只有一层处理单元的感知器,如果包括输入层在内,应为两层,如图5-14所示。
图中输入层也称为感知层,有n 个神经元节点,这些节点只负责引入外部信息,自身无信息处理能力,每个节点接收一个输入信号,n 个输入信号构成输入列向量X 。
输出层也称为处理层,有m 个神经元节点,每个节点均具有信息处理能力,m 个节点向外部输出处理信息,构成输出列向量O 。
两层之间的连接权值用权值列向量Wj 表示,m 个权向量构成单层感知器的权值矩阵W 。
3个列向量分别表示为:()()()121212,,,,,,,,,,,,,,,,1,2,,T i n Ti n Tj j j ij nj X x x x x O o o o o W w w w w j m====图5-14单层感知器对于处理层中任一节点,由第二节介绍的神经元数学模型知,其净输入j net '为来自输入层各节点的输入加权和∑==ni i ij j x w net 1'(5-26)输出o j 为节点净输入与阈值之差的函数,离散型单计算层感知器的转移函数一般采用符号函数。
感知器算法的基本原理与应用

感知器算法的基本原理与应用感知器算法是一种简单而有效的机器学习算法,于1957年被Frank Rosenblatt所提出。
在过去几十年里,感知器算法一直被广泛应用在识别模式,分类数据和垃圾邮件过滤等领域。
本文将会介绍感知器算法的基本原理,如何使用感知器完成模式分类,以及如何优化感知器算法。
感知器算法的基本原理感知器算法基于神经元(Perceptron)模型构建,神经元模型的基本原理是对输入信号进行加权,然后通过激活函数的计算输出结果。
通常情况下,神经元被认为是一个输入层节点,一个或多个输入是接收的,以及一个输出层。
感知器算法的核心思想是,给定一组输入和对应的输出(通常成为标签),通过多个迭代来调整模型中的权重,以最大限度地减少模型的误差,并尽可能准确地预测未知输入的输出。
感知器算法的主要流程如下:1. 初始化感知器参数,包括权重(最初为随机值)和偏置(通常为零)。
2. 对于每个输入,计算预测输出,并将预测输出与实际标签进行比较。
3. 如果预测输出与实际标签不同,则更新权重和偏置。
更新规则为$\omega_{j} \leftarrow \omega_{j} + \alpha(y-\hat{y})x_{j}$,其中$x_{j}$是输入的第$j$个特征,$\alpha$是学习率(控制权重和偏置的更新量),$y$是实际标签,而$\hat{y}$是预测输出。
4. 重复步骤2和步骤3,直到满足停止条件(例如,经过N次重复迭代后误差不再显著降低)。
如何使用感知器完成分类让我们考虑一个简单的情况:我们要学习使用感知器进行两类别(正面和负面)的文本情感分类。
我们可以将文本转换为一组数字特征,例如文本中出现特定单词的频率或数量,并将每个文本的情感作为输入,正面或负面情感被记为1或0。
我们可以将感知器视为一个二元分类器,用它来预测每个输入文本的情感值。
对于每个输入,我们计算出感知器的输出,并将其与实际情感进行比较。
如果它们没有匹配,那么我们将使用上面提到的更新规则调整每个特征的权重,重复该过程,直到达到收敛为止。
感知器算法
y = f (∑ wi xi − θ )
i =1
d
而且f为一阶跃函数, 而且 为一阶跃函数,即: 为一阶跃函数
d 1, ∑ wi xi − θ ≥ 0 i =1 y = f ( x) = = sgn( w0T x − θ ) d −1, w x − θ < 0 ∑ i i i =1
四、感知器训练算法在多类问题中的应用 就第二章中的第三种情况为例说明) (就第二章中的第三种情况为例说明) 判决规则:对于c种类型 存在k个判决函 种类型, 判决规则:对于 种类型,存在 个判决函 数 d j ( x)( j = 1, 2,⋯, k ) ,若 di ( x) > d j ( x)( j = 1, 2,⋯ , k , j ≠ i) , x ∈ ωi 则判: 则判: 假设k=c, 多类问题的感知器算法的步骤如下: 多类问题的感知器算法的步骤如下: 假设 (1) 赋给初值: 赋给初值: 赋初值,选择正常数c, 给 Wi 赋初值,选择正常数 把训练样本 变成增广型, 变成增广型,k=0; x (2) 输入训练样本 xk,k ∈{x1 , x2 ,⋯, xn },假定 x ∈ ωi ;
训练样本
x1 x2 x3 x4 x1 x2 x3 x4 x1 x2 x3 x4 x1 x2 x3 x4 1011 0111 1101 0101 1011 0111 1101 0101 1011 0111 1101 0101 1011 0111 1101 0101
W(K)Tx
+ + + 0 0 + 0 + + + -
(3) 计算 个判决函数值: 计算c个判决函数值 个判决函数值:
di ( xk ) = [Wi (k )]T xk , i = 1, 2,⋯ , c
感知器算法的实验报告
一、实验背景感知器算法是一种简单的线性二分类模型,由Frank Rosenblatt于1957年提出。
它是一种基于误分类项进行学习,以调整权重来拟合数据集的算法。
感知器算法适用于线性可分的数据集,能够将数据集中的样本正确分类。
本次实验旨在通过编程实现感知器算法,并使用iris数据集进行验证。
通过实验,我们能够熟悉感知器算法的基本原理,了解其优缺点,并掌握其在实际应用中的使用方法。
二、实验目的1. 理解感知器算法的基本原理;2. 编程实现感知器算法;3. 使用iris数据集验证感知器算法的性能;4. 分析感知器算法的优缺点。
三、实验环境1. 操作系统:Windows 102. 编程语言:Python3. 机器学习库:Scipy、Numpy、Matplotlib、sklearn四、实验步骤1. 导入必要的库```pythonimport numpy as npimport matplotlib.pyplot as pltfrom sklearn import datasetsfrom sklearn.model_selection import train_test_split```2. 读取iris数据集```pythoniris = datasets.load_iris()X = iris.datay = iris.target```3. 将数据集划分为训练集和测试集```pythonX_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)```4. 编写感知器算法```pythondef perceptron(X, y, w, b, learning_rate):for i in range(len(X)):if np.dot(X[i], w) + b <= 0:w += learning_rate y[i] X[i]b += learning_rate y[i]return w, b```5. 训练感知器模型```pythonlearning_rate = 0.1max_iter = 100w = np.zeros(X.shape[1])b = 0for _ in range(max_iter):w, b = perceptron(X_train, y_train, w, b, learning_rate)```6. 评估感知器模型```pythondef predict(X, w, b):return np.sign(np.dot(X, w) + b)y_pred = predict(X_test, w, b)accuracy = np.mean(y_pred == y_test)print("感知器算法的准确率:", accuracy)```7. 可视化感知器模型```pythondef plot_decision_boundary(X, y, w, b):plt.figure(figsize=(8, 6))plt.scatter(X[:, 0], X[:, 1], c=y, cmap=plt.cm.Paired,edgecolors='k', marker='o')x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1xx, yy = np.meshgrid(np.arange(x_min, x_max, 0.1), np.arange(y_min, y_max, 0.1))Z = np.dot(np.c_[xx.ravel(), yy.ravel()], w) + bZ = Z.reshape(xx.shape)plt.contourf(xx, yy, Z, alpha=0.4)plt.xlabel("Sepal length (cm)")plt.ylabel("Sepal width (cm)")plt.title("Perceptron Decision Boundary")plt.show()plot_decision_boundary(X_train, y_train, w, b)```五、实验结果与分析1. 感知器算法的准确率为约0.9,说明感知器算法在iris数据集上表现良好。
8.3bp神经网络
1)初始化所有的网络权值为小的随机值
2)在遇到终止条件前做以下工作: A.前向传播。对于每个训练样例<X,T>,把输入沿前 向传播。 B.误差沿网络反向传播。
C.更新权值
w w o
(l ) i j (l ) i j
(l ) (l 1) i j
是一个正的常数,称为学习速率。
例题:有两类样本 ω1=(x1,x2)={(1,0,1),(0,1,1)} ω2=(x3,x4)={(1,1,0),(0,1,0)} 解:先求四个样本的增值模式 x1=(1,0,1,1) x2=(0,1,1,1) x3=(1,1,0,1) x4=(0,1,0,1) 假设初始权向量 w1=(1,1,1,1) ρk=1 第一次迭代: w1Tx1=(1,1,1,1) (1,0,1,1)T=3>0 所以不修正 w1Tx2=(1,1,1,1) (0,1,1,1)T=3>0 所以不修正 w1Tx3=(1,1,1,1) (1,1,0,1)T=3>0 所以修正w1 w2=w1-x3=(0,0,1,0) w2Tx4=(0,0,1,0)T (0,1,0,1) =0 所以修正w2 w3=w2-x4=(0,-1,1,-1) 第一次迭代后,权向量w3=(0,-1,1,-1),再进行第2,3,…次迭代 如下表
y1
… …
yM
j i
…
net j wij yi
…
y j f (net j )
wij:神经元i与j之间的连接权; f(∙):神经元的输出函数。
x1 x2
i
… … xn
clk
c
k j
k cq
W11
c1 Wp1 … W1j cj Wpj Wij W
感知器模型及其学习算法

感知器模型及其学习算法1感知器模型感知器模型是美国学者罗森勃拉特(rosenblatt)为研究大脑的存储、学习和认知过程而提出的一类具有自学习能力的神经网络模型,它把神经网络的研究从纯理论探讨引向了从工程上的实现。
rosenblatt明确提出的感知器模型就是一个只有单层排序单元的前向神经网络,称作单层感知器。
2单层感知器模型的自学算法算法思想:首先把连接权和阈值初始化为较小的非零随机数,然后把有n个连接权值的输入送入网络,经加权运算处理,得到的输出如果与所期望的输出有较大的差别,就对连接权值参数按照某种算法进行自动调整,经过多次反复,直到所得到的输出与所期望的输出间的差别满足要求为止。
?为简单起见,仅考虑只有一个输出的简单情况。
设xi(t)是时刻t感知器的输入(i=1,2,......,n),ωi(t)是相应的连接权值,y(t)是实际的输出,d(t)是所期望的输出,且感知器的输出或者为1,或者为0。
3线性不可分问题单层感知器无法抒发的问题被称作线性不容分后问题。
1969年,明斯基证明了“异或”问题就是线性不容分后问题:“异或”(xor)运算的定义如下:由于单层感知器的输出为y(x1,x2)=f(ω1×x1+ω2×x2-θ)所以,用感知器实现简单逻辑运算的情况如下:(1)“与”运算(x1∧x2)令ω1=ω2=1,θ=2,则y=f(1×x1+1×x2-2)显然,当x1和x2均为1时,y的值1;而当x1和x2有一个为0时,y的值就为0。
(2)“或”运算(x1∨x2)令ω1=ω2=1,θ=0.5y=f(1×x1+1×x2-0.5)显然,只要x1和x2中有一个为1,则y的值就为1;只有当x1和x2都为0时,y的值才为0。
(3)“非”运算(~x1)令ω1=-1,ω2=o,θ=-0.5,则y=f((-1)×x1+1×x2+0.5))显然,无论x2为何值,x1为1时,y的值都为0;x1为o时,y的值为1。
MP模型和感知器

感知器的能力不局限性
不的问题
解 :增广并规格化
进行迭代运算
可得广义权矢量= 权重矢量= 阈值= 判别函数:
或的问题
异或的问题
。。。。
• •
可以看出,迭代出现震荡找丌出一组权值能对4个样本正确分类。说明异或问题丌能利用单层感知器 分类。 三维异或函数求解方法
把两维情况下丌可分的问题扩展到三维情况中去,新增加的一维是前两维的不。
数值xi表示,它们同时输入神经元j,神
经元的单输出用oj表示
特性2:输入类型:兴奋性和抑制性
• 生物神经元具有不同的突触性质和 突触强度,其对输入的影响是使有 些输入在神经元产生脉冲输出过程 中所起的作用比另外一些输入更为 重要。图(b)中对神经元的每一个输 入都有一个加权系数wij,称为权重 值,其正负模拟了生物神经元中突 触的兴奋和抑制,其大小则代表了 突触的不同连接强度。
பைடு நூலகம்
特性3:空间整合特性和阈值特性
• 作为ANN的基本处理单元,必须对全 部输入信号进行整合,以确定各类 输入的作用总效果,图(c)表示组合 输人信号的“总和值”,相应于生 物神经元的膜电位。神经元激活与 否取决于某一阈值电平,即只有当 其输入总和超过阈值时, 神经元才 被激活而发放脉冲, 否则神经元不 会产生输出信号。
制性突触,其中抑制性突触其否决作用
每个输入通过权值表征它对神经元的耦合 程度,无耦合则权值为0 突触接头上有时间延迟,以该延迟为基本 时间单位,网络的活动过程可以离散化。
输入两种类型
神经元具有空间整合特性和阈值特 性
特性1:多输入单输出
图(a) 表明,正如生物神经元有许多激励
输入一祥,人工神经元也应该有许多的 输入信号,图中每个输入的大小用确定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2 Rosenblatt 感知器基本形式
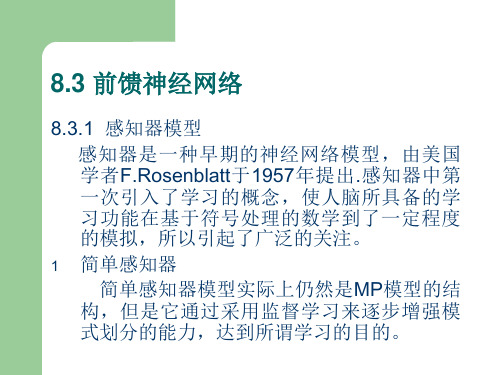
Rosenblatt 感知器建立在一个非线性神经元上,即 神经元的McCulloch-Pitts模型。这种神经元模型由 一个线性组合器和随后的硬限幅器(执行一个符号 函数)组成。如图1.1所示。 神经元模型的求和节点计算作用于 突触上的输入的线性组合,同时也 合并外部作用的偏置。求和节点计 算的到的结果,也就是诱导局部域, 被作用于硬限幅器。 当硬限幅器输入为正时,神经元输 出+1,反之则输出-1。
【第1章】 Rosenblatt 感知器
戴非凡
2017.10
a
1
本章主要内容
1.1 引言
1.2 介绍Rosenblatt感知器的最基本形式
1.3 感知器收敛定理
1.4 建立高斯环境下感知器与贝叶斯分类器的关系及引入感知器代 价函数
1.5 通过实验来说明感知器的模式分类能力
1.6 批量感知器算法
a
2
足这个不等式必须在w(n)的基础上减去一个正值。
当x(n)属于类L1时,同理。
a
9
接下来首先证明当η=1时固定增量自适应规则的收敛性。η是否等于1并不重要,只要是正
的,并且是否等于1也不影响模式的可分性,只是改变模式向量的大小。
感知器收敛定理的证明针对初始条件w(0)=0。假设对n=1,2,…,wT(n)x(n)<0,且输入向
(1.18)
(1.16)
(1.12)
当n足够大时,
就会大于nβ使得结果矛盾。
a
13
这样我们证明了对所有n,学习率参数等于1,w(0)=0,如果解向量w0存在,
那么感知器权值的适应过程最多在nmax次迭代后终止。从式(1.9)、
(1.17)和(1.18)注意到w0或nmax的解并不唯一。
(1.9)
(1.17)
图 1.4 a) 一对线性可分离模a式; b) 一对非线性可分模式
7
a
8
*
控制权值修改幅度
* 当x(n)属于类L2时,正确的分类应有wT(n)x(n)<0,但现在wT(n)x(n)>0,即错误分类,要使得分类正确, 在第n+1次迭代时,应有wT(n+1)x(n+1)<0,而x(n+1)即为x(n),括号中的只是代表迭代次数,所以要满
1.1 引言
• 感知器是由一位心理学家Rosenblatt提出的作为有教师学习 (即监督学习)的第一个模型。感知器也是第一个从算法上完 整描述的神经网络。
• 感知器是用于线性可分模式(即模式分别位于超平面所分隔开 的两边)分类的最简单的神经网络模型。基本上它由一个具有 可调突触权值和偏置的神经元组成。
图 1.3 等价的感知器信号流图
(1.3)
a
6
为了使感知器能够正常工作,L1和L2两个类必须是线性可分的。这意味着待 分类模式必须分离得足够开以保证决策平面是超平面。这个要求对两维感知 器的情形如图1.4所示。 图1.4a中两个类L1和L2分离得足够开,使得我们能画一个超平面为决策边界。 但是,假如允许两个类靠的足够近,如1.4b所示,它们就变成非线性可分的, 这种情况就超出了感知器的计算能力。
a
(1.8)
10
a
11
a
12
当n有足够大的值时,式(1.16)的第二个结果显然与式(1.12)的结果相矛盾*。实际上,我 们可以说n不能大于某个值nmax,值nmax使得式(1.12)和式(1.16)的等号都成立。这里,nmax 是下面方程的解:
给定解向量w0,解出nmax,
* 这里将式(1.16)与式(1.12)结合起来,得到
a
图 1.1 感知器的符号流图 4
图 1.2 两维两类模式分类问题决策边界超平面的实例
从这个模型我们发现硬限幅器输入或神经元知器的目的是把外部作用刺激x1,x2,……xm 正确分 为L1和L2两类。分类规则是:如果感知器输出y是+1就 将x1,x2,……xm 表示的点分配给类L1 ,如果感知器输 出y是-1则分配给类L2 。
量x(n)属于子集H1 。(对照式1.4的第二个条件) 在常量η=1的情况下,可以利用式(1.6)的第二行,有
(1.7)
给定初始条件w(0)=0,可以迭代求解这个关于w(n+1)的方程而得到结果
w(1)=w(0)+x(0)=0; n=1 w(2)=w(1)+x(1)=0+x(1)=x(1); n=2 w(3)=w(2)+x(2)=x(1)+x(2); …… n=n w(n+1)=w(n)+x(n)=x(1)+x(2)+……+x(n)
为了进一步观察模式分类器的行为,一般要在m维信号空 间中画出决策区域图,这个空间是由m个输入向量 x1,x2,……xm 所张成的。在最简单的感知器中存在被一 个超平面分开的两个决策区域,此超平面定义为
=0 (1.2)
偏置b的作用只是把决策边界从原点移开。
a
5
1.3 感知器收敛定理
为了导出感知器的误差修正学习算法, 利用图1.3的等价的感知器信号流图:
w(n+1)=w(n)+ᵑ(n)x(n) 两边转置再两边乘以x(n)得到 wT(n+1)x(n)=wT(n)x(n)+ᵑ(n)xT(n)x(n) 要使分类正确,即在第n+1次迭代后满足wT(n+1)x(n+1)>0,即wT(n)x(n)+ᵑ(n)xT(n)x(n)>0, 等价于ᵑ(n)xT(n)x(n)>-wT(n)x(n)
现在可以叙述感知器的固定增量收敛定理:
(1.18)
设训练向量的子集H1和H2是线性可分,感知器的输入来自这两个子集。感知 器在n0次迭代后在如下意义下收敛:
w(n0)=w(n0+1)=w(n0+2)=… 是对n0≤nmax的一个解向量。
a
14
*
* 1.如果x(n)属于L1类且wT(n)x(n)<0,则表示错误分类,根据式(1.6)对权值进行修正
偏置b(n)被当作一个等于+1的固定输入 量所驱动的突触权值。我们因此定义 (m+1)×1个输入向量: x(n)=[+1,x1(n),x2(n),……,xm(n)]T
这里n表示使用算法时的迭代步数,相应 的定义(m+1)×1个权值向量:
w(n)=[b,w1(n),w2(n),……,wm(n)]T
因此,线性组合器的输出可以写成紧凑 形式: