全站仪指标差和2C值
关于全站仪2C的问题

关于全站仪2C的问题2C的问题,恐怕要从源头说起,大家知道,视准轴不垂直于横轴便产生视准误差2C,它对读数的影响是:盘右方向值:A=R-ΔC盘左方向值:A=L+ΔC而ΔC=C/COSαΔC--视准轴误差影响,C为视准误差。
从上式可以看出,ΔC随垂直角α的增大而增大,高等级控制测量中,理论上假定α≈0°,此时ΔC≈C,则L-R=2C,这就是2C的概念。
但实际工作中,控制点间的高差可能比较大,即同一测站照准各方向的垂直角α之差相差较大,因而各方向的2C本身就相差大。
所以规范规定,当照准方向的垂直角超过±3°时,该方向的2C变化按同一观测时段内的相邻测回单独比较,因此,我认为2C的绝对值的大小人为无法完全控制。
我们知道,2C对水平角的影响可以通过正倒镜观测消除,也就是说2C绝对值的大小不影响观测结果的精度。
但规范和一般文献的解释是“2C的绝对值过大时给计算盘左、盘右的平均值带来不便”,所以规定J2经纬仪的2C绝对值不大于30”,J1经纬仪的2C绝对值不大于20”。
这样的解释显然有点勉强,况且一般的测角仪器通过了三轴鉴定和校正,在仪器鉴定条件下,2C的绝对值是能够控制的,事实上也有标准。
说了这么多,我的结论是:2C的绝对值大小,规范虽然有要求,不存在楼主说的“经纬仪(全站仪)的2C本身到底应该小于多少时,才可以使用的问题”,只要仪器经过三轴校正并鉴定合格,测量过程中,按规范严格控制2C互差范围,就可以使用。
另:竖盘指标差的绝对值一般不超过25″。
水平角观测(经纬仪原理)一、水平角测角原理如图3—9所示,A、B、C为地面三点,高程不相等。
将这三点沿铅垂线方向投影到PQ水平面上,在水平面上得到A1、B1、C1三点,则水平成B1A1与BlC1夹角β定义为地面上直线BA和BC间的水平角。
由此可见,地面任意两直线间的水平角度,为通过该两直线所作竖直面间的两面角。
为了能测出水平角的大小,可在此两竖直面的交线上任一高度0点水平地放置一刻度盘,通过BA和BC和一竖直面,与刻度盘的交线为0m、0n,在刻度盘上相应的读数为b 和a,从而求得水平角。
2C互差对CP_平面网精度影响的仿真计算与分析
2011年1月第1期(总148)铁 道 工 程 学 报J OURNAL OF RA IL W AY ENG I N EER ING SOC I ETYJan 2011NO.1(Ser .148)收稿日期:2010-07-24作者简介:张绪丰,1985年出生,男,在读硕士研究生。
文章编号:1006-2106(2011)01-0015-052C 互差对CP 平面网精度影响的仿真计算与分析张绪丰1刘成龙1陈 澍1郑子天2(1.西南交通大学, 成都610031; 2.中铁二院工程集团有限责任公司, 成都610031)摘要:研究目的:在满足CP 网点间相对点位精度要求的前提下,在CP III 网实测数据添加符合正态分布的随机误差,以此来模拟2C 互差值,同时采用边角网间接平差的严密精度估算方法,探究2C 互差对CP 平面网主要精度的影响。
研究结论:根据无碴轨道CP 平面网外业观测的方法和特点以及测量现状,通过添加符合正态分布随机误差的方法,模拟2C 互差值,并采用某客专的部分数据进行了仿真计算。
通过对结果的分析,证明了2C 互差对CP 平面网的主要精度有一定的影响,然而,在起算数据精度较好和投影变形较小的前提下,通过本文的研究认为可以适度放宽2C 互差的限差至15 ,这时CP 平面网的主要精度指标仍能满足规范的要求,这样的话放宽2C 互差的限差指标可提高CP 平面网的测量效率,也为高速铁路工程测量规范的修订与完善提供基础资料。
关键词:2C 互差;正态分布随机误差;CP 平面网;相邻点位相对精度中图分类号:U 212.24 文献标识码:ASi m ulati ng Calculati on and Analysis of t he I mpact of 2CM ut ualDeviati on onAccuracy of CP Plane Net workZHANG Xu -feng 1,LIU Cheng -long 1,CHEN Shu 1,ZHENG Zi -tian 2(1.Southw est Jiao tong Un i v ersity ,Chengdu ,S ichuan 610031,China ;2Ch i n a R ail w ay Eryuan Eng ineeri n g Group Co .Ltd ,Chengdu ,S ichuan 610031,China)Abst ract :R esearch purposes :The rando m error wh ich confor m ed to the nor m al d istr i b ution w as appended to the observed date o f CPIII net w ork to si m u late the 2C m utua l dev i a ti o n under the pre m ise o f m eeting the requ ire m ent o f re lative po i n t position accuracy of CP ne t w ork ,and also the tight and precise esti m ation m ethod for calcu lati o n of the i n direct ad j u st m ent ofm arg i n net w ork w as used for exp lori n g the i m pact o f 2C mutual dev iation on the accuracy o f CPIII plane net w or k.R esearch concl u sions :The va l u e of 2C m utua l deviati o n w as si m ulated by add i n g the rando m error confo r m ed to the nor m a l distri b u ti o n ,and the si m u lation calcu lation o f the partia l date of one passenger dedicated li n e w as m ade ,acco r d i n g to the fie l d observati o n m ethod and features as w e ll as m easure m ent situati o n of ballastless track CPIII p l a ne net w or k.The ana l y si resu lt sho w ed t h e 2C m utua l deviati o n has certain i m pact on the accuracy o fCPIII plane net w ork .But under the pre m ise o f hav ing good i n itial calc u lation data and little pro jecti o n distorti o n ,the m ain m easure m ent prec isions o f CPIII p lane net w o r k could m eet the specificati o n requ ire m ent by w iden i n g the 2C mutual dev iation to 15seconds .Such w i d ening the 2C m utual dev iation cou l d enhance t h e m easure m ent efficiency o f CPIII p lane net w or k and prov i d e he funda m enta l data for the rev isi o n and i m pr ove m ent o f the eng i n eering sur vey specification for h i g h-speedra il w ay .K ey w ords :2C mu t u a l dev iation ;nor m al d istri b uti o n rando m error ;CP plane net w or k;re lati v e precisi o n bet w een ad jacentm easure m ent spots高速铁路无碴轨道要求具有良好的平顺性,CP 控制网是保证这一要求的关键技术。
瑞得全站仪简明操作手册

瑞得全站仪简明操作手册一、参数设置按测量1键持续1秒钟,对合作目标、棱镜常数、测量模式和记录模式进行设置。
按左右键修改设置,最后回车确认.按测量2持续1秒也可进行上述设置,因此可分别设置两种测量模式以适应不同情况.按热键按钮,再按2键,进行温度、气压设置按住背景光设置键1秒钟,可进行背景光,声音,对比度设置二、坐标数据输入与删除按菜单键,再按4(数据),再按2(坐标数据)通过上下键选择坐标点,按测量1键删除该坐标,或按角度键输入新点的N,E,Z坐标、点名PT和编码CD的值。
回车确认后,仪器自动进入下一点坐标输入界面,点名自动累加。
三、测站设置按7键建站按1键输入测站点名,已知坐标,仪高并回车。
按[模式]键可切换数字与字母输入状态.若坐标已存在,可按显示,从坐标列表中直接调取.按1键进行坐标(或角度)后视定向输入后视点点名,坐标和棱镜高并回车。
若坐标已存在,可按显示,从坐标列表中直接调取。
照准后视点按回车完成设置,或按测量键检核后视四、坐标测量测站设置完成后,照准待测目标点棱镜,按测量1开始测量按上下翻页键或显示键查看测量结果五、坐标放样先进行测站设置(方法同三).再进行坐标放样。
按8号放样键,按2坐标放样。
若放样坐标已存在仪器中,可按显示,从坐标列表中直接调取。
否则连续回车,进入放样点坐标输入界面.输入放样点坐标,按回车确认。
界面显示角度差,旋转仪器直至角度差dAZ为零,即为放样点方向将棱镜放在该方向上,照准棱镜中心,按测量1键测量后,显示测量点与放样点差值,不断调整棱镜位置,使各差值为零,则棱镜处即为放样点位置。
六、后方交会按7键建站,再按2(后方交会),按显示键调取第1个已知点坐标数据,或直接回车输入第1个已知点坐标。
回车确认后瞄准第1个已知点棱镜,按测量1键显示测量成果,确认。
同样方法再调用或输入第2个已知点坐标,回车确认后瞄准第2个已知目标,按测量1显示成果,确认。
此时交会点被自动计算,按显示键可翻页查看计算结果.当显示的残差值满足要求时,按记录键把该点设为测站点。
全站仪2C和指标差

仪器的2C值(视准轴不垂直于横轴,在水平方向观测同一点时会产生一个C值,且盘左=盘右,符号相反)
操作方法:先用盘左、照准目标、水平制动
(VR竖直角度控制在0°-10°之间)
水平角置零,HR显示为0°0′0″,松开水平制动,转动180°,用盘右照准目标,理想角度HR显示180°0′0″,一般很难达到。
之间差为2C值
2C=(&左-&右)±180°
全站仪指标差也称i角误差(视准线与横轴不在90°或270°平面上)
指标差=
操作方法:用望远镜分别在正镜和倒镜位置瞄准(垂直角控制在±10°左右的平行光管分划板或远处目标
THANKS !!!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
欢迎您的下载,资料仅供参考。
导线测量(导线测量2C值有效范围)
原创不容易,【关注】店铺,不迷路!牛人经验分享!全站仪导线测量的详细操作方法一目了然!由于一般提供的控制点较远,一般需要在道路工程开工前对控制点进行加密,这将涉及到附合导线测量。
我们将与你分享两篇关于如何做的文章。
阐述了导线测量的野外工作,包括选点、埋石和观测;下一部分说明办公室的调整和坐标计算。
首先,实地选定控制点选址前,必须有计算程序,路线的设计参数经过编辑,知道路线的大致走向。
选点的几个要求:基础稳固,便于架设仪器和后期放线,超出施工挖填范围一定距离,相邻两点能见度好,各点与前后相邻点的距离尽可能长。
要确定导线等级,请参考下面的《导线测量的主要技术参数》。
第二,埋石头在选定的点挖一个坑。
根据土质情况,建议埋深不小于0.6m.将钢筋切成约50厘米长的小块,选择横截面平坦光滑的一端,用钢锯锯成约2mm深的十字丝,备用。
将搅拌好的混凝土倒入坑内,人工夯实,表面平整,在中心插入钢筋,钢筋顶端高出混凝土表面1厘米左右。
在混凝土表面标记点数。
这样的控制点被埋没了。
注意:有些问题不是绝对的。
例如,也可以在坚固稳定的岩石或建筑物上做标记和标记。
总之把握一个原则,控制点要稳定,便于后期保存和使用。
第三,导线测量(角度测量和距离测量)为了方便大家&prime的学习和理解,我将用一个案例来论证。
案例背景G1、G2、G3、G4为设计院给出的坐标已知的控制点,D1、D2、D3为待测的埋地加密点。
连接两个相邻点后,形成一个导线电路图,如下图所示:测量方案从G1点到G4点测量,测得的水平角为左角。
导线等级为一级,测量仪器为二级;全站仪,使用同型号的两个棱镜。
根据技术要求,每个站需要观测两次回波测量。
开始前的一些常识说明线边:两个线点的连线在水平面上的投影称为线边,所以线边的长度就是相邻两点之间的水平距离。
水平角:指相邻两条导线边缘形成的夹角。
左右角:观测推进方向的左角称为左角,右角称为右角,一般测量。
前点和后点:前点和后点由观测点的位置决定,在相对于观测点的观测方向上称为前点,反之亦然。
全站仪测角精度分析1

全站仪测角精度分析作者:风流无情*易言*刘清利让许多测量初学者头痛的并不是测量如何进行,仪器如何操作的问题,其关键在于测角、测边的各种限差如何得知,不同的仪器其2C、上下半测回角之差限值、测回间角值较差限差如何确定的问题。
此文只就仪器精度进行分析。
全站仪精度为2’’是指一测回水平方向中误差不大于2’’。
而一测回水平方向是指盘左盘右方向值的平均值,即:一测回方向=盘左方向值+(盘右方向值±180°)2一、半测回归零差限差:设一测回方向中误差为m=±2’’,则盘左方向中误差=盘右方向方中误差=2√2’’由于半测回归零差=盘左方向值-(盘右方向值±180°)则半测回归零差方向值中=√2*2√2=4’’.2C限值取中误差的2倍,即2C=8’’二、一测回角值中误差及测回间角值较差的限差:一测回角值为两个方向值之差,所以,一测回角值中误差为mβ=m√2=2√2’’,用测回法测量水平角两个测回,两测回间角值较差方中误差是一测回角值中误差的√倍,即m∆=√β=4’’,取两倍中误差为限差,则测回间角值差的容许误差为2m∆=8’’三、半测回角值的中误差及上下半测回角值之差限差:一测回的角值是上下半测回角值平均值,故半测回角值中误差为:m=√2mβ=4’’,则上下半测回角值之差限差为半m∆=m半√2=4√2’’=5.6’’,取中误差的2倍为容许误差,故容许误差为11.2’’四、上边一二三部中对应的函数式如下:1.一测回方向=盘左方向值+(盘右方向值±180°)22.2C=盘左方向值-(盘右方向值±180°)3.一测回角值=(一测回方向)后-(一测回方向)前4.测回间角值较差=一测回角值-另一测回角值5.一测回角值=上半测回角值+下半测回角值26.上下半测回角值较差=上半测回角值-下半测回角值五、常用函数中误差公式:。
CPIII技术要求

CPⅡ控制网及二等水准基点加密为满足CPⅢ控制网测量联测的需要,CPⅢ平面网建网前应保证沿线路方向每隔400~800m左右有一个CPⅠ或CPⅡ控制点可供CPⅢ平面网联测,不满足间距条件时应按GPS三等测量的技术要求加密CPⅡ控制点。
CPⅢ高程网建网前为应保证2km线路长度范围内至少有一个稳定可用的线路水准基点,不满足间距条件时应按二等水准测量技术要求加密水准基点。
CPⅢ观测条件要求CPⅢ数据采集时必须高度重视外部观测条件的影响。
CPⅢ观测时,作业现场应无明显震动、灰尘、干扰光源,观测视线无遮挡物及无交叉施工干扰。
CPⅢ观测应选择在阴天或夜间进行,在大风、雨雪天气以及霜冻或水雾较大时均不应进行观测。
CPⅢ网测量CPⅢ标志及埋设CPⅢ点标志CPⅢ点应设置强制对中标志,标志几何尺寸的加工误差应不大于0.05mm,CPⅢ标志棱镜组件安装精度应符合表7.1.1的要求:建议采用统一的CPⅢ棱镜组件。
预埋件、高程测量适配器、棱镜连接适配器统一采用单轴CPIII标志配套Leica GPR121棱镜。
单轴CPⅢ标志组件由预埋件、棱镜测量杆、棱镜连接件三部分组成。
CPⅢ棱镜组件、棱镜样图及规格尺寸如下:图7.1.1.1 预埋件平面图图7.1.1.2预埋件口及金属保护保护盖图7.1.1.3 棱镜测量杆图7.1.1.4 水准测量杆图7.1.1.5 LeicaGPR121进口钢化精密棱镜CPIII标志规格尺寸(单位mm)如下图所示:图7.1.1.6 水准测量杆的标准尺寸图7.1.1.7 棱镜测量杆的标准尺寸图7.1.1.8 棱镜测量杆的标准尺寸标志的检查采用内径和外径千分尺检测,加工误差不得大于0.05mm,达到加工尺寸范围为合格。
将检查结果填写于测量标志检查记录附件9.6所需表格2:测量标志检查记录表。
检查平面(高程)测量连接杆和预埋件外观有是否完好,平面(水准)测量杆全部插入预埋件后预埋件沿口应和平面(水准)测量杆突出横截面是否密接,有无明显晃动等。
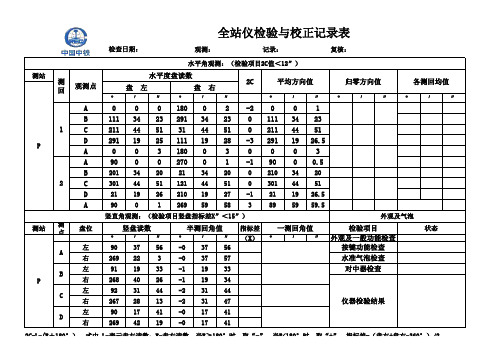
全站仪检验记录表
D
291 19 25 111 19 28 -3 291 19 26.5
ห้องสมุดไป่ตู้
P
A
0
0
3 180 0
3
0
0
0
3
A
90 0
0 270 0
1 -1 90 0 0.5
B
201 34 20 21 34 20
0 210 34 20
2
C
301 44 51 121 44 51
0 301 44 51
D
21 19 26 210 19 27 -1 21 19 26.5
A
90
0
1 269 59 58
3
89 59 59.5
测站
测 点
A
B P
C
竖直角观测:(检验项目竖盘指标差X”<15”)
外观及气泡
盘位
竖盘读数
半测回角值 指标差 一测回角值
检验项目
状态
° ′ ″ ° ′ ″ (X) ° ′ ″ 外观及一般功能检查
左
90 37 56 -0 37 56
按键功能检查
右
269 22
3
-0 37 57
水准气泡检查
左
91 19 33 -1 19 33
对中器检查
右
268 40 26 -1 19 34
左
92 31 44 -2 31 44
右
267 28 13 -2 31 47
仪器检验结果
左
90 17 41 -0 17 41
D
右
269 42 19 -0 17 41
2C=L-(R±180°) 式中 L-表示盘左读数;R-盘右读数,当R≥180°时,取“-”,当R<180°时,取“+”,指标差=(盘左+盘右-360°)/2