平面连杆机构类型和应用讲解顺序
平面连杆机构的基本类型及应用2

教案纸新课讲述第一节平面连杆机构的基本类型及应用四、滑块机构除了上述三种铰链四杆机构外,在工程实际中还广泛应用着其他形式的四杆机构,其中的绝大多数都可以看作是由铰链四杆机构演化而来的。
1. 曲柄滑块机构图5-9a 所示为一曲柄摇杆机构。
摇杆上的C 点的轨迹是以D 为圆心,以CD 为半径的圆弧mn 。
若将摇杆CD 的长度增加至无穷大,转动副 D 将移至无穷远处,则转动副 C 的轨迹mn 将变成一直线。
构件3 与4 之间的转动副D 将转化成移动副,该机构演化为曲柄滑块机构(图5-9b)。
在该图中,滑块上的转动副中心 C 的移动轨迹mn 不通过曲柄的回转中心A ,该机构称为偏置曲柄滑块机构。
曲柄回转中心 A 到mn 的垂直距离称为偏距,以e 表示。
当e =O ,即直线mn 通过曲柄的回转中心 A 时,该机构称为对心曲柄滑块机构(图5-9c),简称曲柄滑块机构。
它广泛地应用于活塞式内燃机、空气压缩机以及冲床等机械设备中。
2. 转动导杆机构和摆动导杆机构若将图5-10a 中的构件1取为机架,如图5-10b 和5-10c 所示,当 a <b 时构件2 和 4 分别绕固定轴B 和A 作整周转动。
该机构称为转动导杆机构。
图5-11a 所示的插床主体机构中的机构ABC 就是转动导杆机构。
当a >b 时,导杆 4 只能绕转动副 A 相对于机架1作往复摆动,故该机构称为摆动导杆机构。
图5-11b 所示的牛头刨床主体机构中的机构ABC 即是摆动导杆机教案纸新课讲述构的应用实例。
3. 曲柄摇块机构和移动导杆机构若将图5-10a 中的构件2 取为机架,如图5-10d所示,则滑块3 只能是绕固定轴 C 作往复摆动的摇块,故该机构称为曲柄摇块机构。
图5-12 所示的汽车自动卸料机构就是曲柄摇块机构。
若将图5-10a 中的3 作为机架,如图5-10e 所示,则导杆只能在固定滑块 3 中往复移动,故该机构称为移动导杆机构。
连杆机构类型及应用分析 平面连杆机构设计

点击D点演示设计过程
三、 按给定连杆位置设计
1. 按连杆的两个给定位置设计
三、 按给定连杆位置设计
2. 按连杆的三个给定位置设计
点击B点演示设计过程
设计举例
举例:设计一振实造型机的反转机构, 要求反转台位于位置Ⅰ(实线位置) 时,在砂箱内填砂造型振实,反转台 转至位置Ⅱ(虚线线位置)时起模, 已知连杆BC长0.5m和两个位置B1C1、 B2C2.。要求固定铰链中心A、D在同 一水平线上并且AD=BC。自己可以 试着在纸上按比例作出图形,再求 出各杆长度。
四、 按给定点的运动轨迹设计
设计四杆机构使其连杆上某点实现 给定的任意轨迹,是十分复杂的。为 了便于设计,工程上常常利用已出版 的《四连杆机构分析图谱》,从中找 出一条相似的连杆曲线,直接查出该 机构各杆尺寸这种方法称为图谱法。
Q
&
A
一、平面连杆机构设计的基本问题
主要任务:根据机构的工作要求、运动特性和设计条件选定 机构形式,并确定出各构件的尺寸参数。
(1)实现给定从动件的运动规律 连杆机构设计两类问题:
(2)实现给定的运动轨迹
图解法
平面四杆机构的设计方法
Hale Waihona Puke 解析法实验法二、 按给定的行程速比因数设计
1.设计曲柄摇杆机构 已知 曲柄机构摇杆L3的长度及摇杆
点击B点演示设计过程
四、 按给定点的运动轨迹设计
连杆曲线 四杆机构运转时,其连杆作平面
运动,连杆上任一点都描绘出一条封闭 曲线称为连杆曲线。 连杆曲线的形状随连杆上点的位置以及 各杆相对尺寸不同而变化。由于连杆曲 线的多样性,使它被广泛地应用于实现 某种运动轨迹的机械上。 如搅拌机就是应用连杆曲线的实例。
项目二:平面连杆机构的应用及类型.

当l1>l2,杆2能作整周转动,杆4只能
往复摆动,称为摆动导杆机构。
当构件2和构件4均能作整周转动,小型刨床就是应用实例
当杆2的长度小于机架长度时,导秆4只能作来回摆动,又称为摆动导 秆机构,牛头刨中的主运动机构是他的应用实例
4、摇块机构和定块机构: 选用不同的构件为机架
摆动滑块机构
使之超过曲 柄的长度 杆1变为圆盘,其几何 中心为B,运动时,圆盘 绕偏心A转动,故称为偏 心轮。 A 、B之间的距离 称为偏心距e,即为曲柄的 长度。
1 4 3
2
2 3 1 4
3、导杆机构: 选用不同的构件为机架
杆4称为导杆 滑块3沿导杆 移动并绕C点 转动
4
当l1≤l2,杆2、杆4能作整周转动,称
在铰链四杆机构中,按两连架杆运 动形式,可将铰链四杆机构分为:
1、曲柄摇杆机构 2、双曲柄机构 3、双摇杆机构
1、曲柄摇杆机构
两个连架杆中,一个为曲柄,另一个为摇杆, 则此铰链四杆机构称为曲柄摇杆机构。 曲柄1为原动件,作匀速转动;摇杆3为从动件, 作变速往复摆动。
应用举例: 惯性筛、插床机构
曲柄摇杆机构应用实例
l4
曲柄摇杆机构
D
将(1)、(2)、(3)式两两相加,得到以下关系式:
l1≤l2,
l1≤l3,
l1≤l4,
以上关系表明l1为最短杆。
l1+l4 ≤l2+l3 (1) l1+l3 ≤l2+l4 (2) l1+l2 ≤l4+l3 (3)
结论:
(1)整转副存在的条件:最短杆与最长杆长度之和小于或等 于其它两杆长度之和。(杆长和条件)
5、双滑块机构: 改变构件的形状和运动副
[经典]平面连杆机构的基础类型及演变
![[经典]平面连杆机构的基础类型及演变](https://img.taocdn.com/s3/m/5f0a76ef0342a8956bec0975f46527d3240ca66f.png)
平面连杆机构的基本类型及演化一.平面连杆机构的基本类型和应用平面连杆机构按照杆件树木的多少可以分为四杆机构、六杆机构和多干机构。
1.曲柄摇杆机构2.双曲柄机构(双曲柄机构中还有平行四边形机构和反平行四边形机构)3.双摇杆机构二.平面四边形机构的演化及应用1.曲柄滑块机构2.偏心轮机构3.摇块机构和定块机构4.导杆机构5.双滑块机构(其中双滑块机构包括正弦机构、双转块机构、双滑块机构)平面机构的工作特性一、平面四杆机构有曲柄的条件在平面四杆机构中,有的连架杆能作正周转动而成为曲轴,而有的连架杆只能在一定的角度范围内摆动而成为摇杆。
由以上根据三角形的边长关系可以得到曲柄、连杆、摇杆、机架中曲柄a是最短的。
而另外的三个构件b,c,d中总有一个是最长的,故,由此可得最短杆和最长杆的长度之和小于或等于其余两杆长度之和。
综上分析可得以下几点。
1、当a<d时铰链四杆机构有曲柄的条件(1)曲柄为最短杆(2)最短杆和最长杆的长度之和小于或等于其余两杆长度之和。
2、当a>d时,铰链四杆机构有曲柄的条件(1)机架为最短杆。
(2)最短杆和最长杆的长度之和小于或等于其余两杆之和。
3、铰链四杆机构有曲柄的条件(1)连架杆和最短杆必有一杆为最短杆。
(2)最短杆和最长杆的长度之和小于或等于其余两杆之和。
4、根据铰链四杆机构有曲柄的条件,得出以下推论。
(1)若铰链四杆机构中的最短杆和最长杆的长度之和大于其余两杆长度之和,则无论去任何杆作为机架,都无曲柄存在,机构为双摇杆机构。
(2)若铰链四杆机构的最长杆和最短杆的长度之和小于或等于其余两杆长度之和,则有以下三种类型:○1若连杆是最短杆,则得双摇杆机构。
○2若两连架杆之一是最短杆,则该连架杆为曲轴,另一连架杆为摇杆,则得曲轴摇杆机构。
○3若机架为最短杆,则与机架相邻的两连架杆均为曲柄,得双曲柄机构。
平面连杆机构——四连杆机构的类型
曲柄摇杆机构 曲柄摇杆机构的应用
双曲柄机构及其应用
天平中的平行四边形机构
反平行四边形机构及其应用
双摇杆机构 双摇杆机构及其在鹤式起重机中的应用
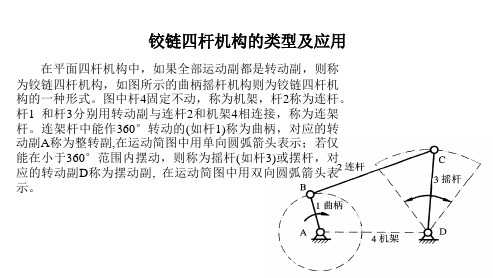
铰链四杆机构的类型及应用
在平面四杆机构中,如果全部运动副都是转动副,则称 为铰链四杆机构,如图所示的曲柄摇杆机构则为铰链四杆机 构的一种形式。图中杆4固定不动,称为机架,杆2称为连杆。 杆1 和杆3分别用转动副与连杆2和机架4相连接,称为连架 杆。连架杆中能作360°转动的(如杆1)称为曲柄,对应的转ห้องสมุดไป่ตู้动副A称为整转副,在运动简图中用单向圆弧箭头表示;若仅 能在小于360°范围内摆动,则称为摇杆(如杆3)或摆杆,对 应的转动副D称为摆动副, 在运动简图中用双向圆弧箭头表 示。
平面连杆机构的基本性质沐风教学

图优讲1课-1堂3 曲柄摇杆机构中的几何关系
7
结论:
(1)曲柄是机构中的最短杆 (2)最短杆与最长杆的长度之和小于或等于其余两杆
长度之和——杆长之和条件。
优讲课堂
8
铰链四杆机构中有一个曲柄的条件:
(1)曲柄为最短连架杆 (2)最短杆与最长杆的长度之和小于或等于其余两杆长度之和——杆长之和条件。
曲柄两位置所夹的锐角。
急回特性:曲柄摇杆机构中,曲柄虽作等速运动, 而摇杆摆动时空回行程的平均速度却大于工作行 程的平均速度
2.公式:急回特性系数K=180˚+θ/180˚-θ
Θ=180˚
k 1 k 1
优讲课堂
13
三、死点位置
1.概念:在曲柄摇杆机构中,取摇杆为主动件,曲柄 为从动件,连杆与曲柄会出现两次共线,这两个位置 就是死点位置。
1.什么是铰链四杆机构?
机构间用四个转动副相连的平面四杆机构,称为平面 铰链四杆机构,简称铰链四杆机构。
2.铰链四杆机构是由那几个构件组成的?
组成: 4—机架 →固定不动 1,3—连架杆 →定轴转动 作整周转动—曲柄
连杆2 连架杆1
连架杆3
作往复摆动—摇杆
机架4
2—连杆→平面运动
优讲课堂
1
3.铰链四杆机构有几种基本类型,分别是什么?
K=180º+θ/180º-θ=1.4
优讲课堂
16
3)以AB为主动件时,该机构有无急回运动?用作图 法求解极位夹角θ,并计算行程速度变化系数K。
C
C
C
B
B
A
D
B
优讲课堂
15
分析:利用类型判别条件及急回特性的原因求解。
平面连杆机构的基本形式
平面连杆机构的基本形式概述平面连杆机构是一种常见的机械结构,用来将转动运动转化为直线运动或者反之。
它由连杆、关节和固定支承组成,广泛应用于机械工程、汽车工业等领域。
本文将介绍平面连杆机构的基本形式、运动学分析和应用。
一、平面连杆机构的定义平面连杆机构是指所有连杆在同一平面内运动的机构,它由刚性连杆和用于连接连杆的关节构成。
常见的平面连杆机构包括曲柄滑块机构、摇杆机构和平行四边形机构等。
1. 曲柄滑块机构曲柄滑块机构是由一个固定的曲轴(曲柄)和一个滑块组成的机构。
滑块沿着直线轨迹运动,可以实现转动运动到直线运动的转换。
它常用于内燃机等系统中的往复运动。
2. 摇杆机构摇杆机构由一个固定支点和两个连杆组成,其中一个连杆通过关节与摇杆连接,另一个连杆通过关节与摇杆相连。
摇杆机构可以实现转动运动到转动运动的转换,广泛应用于机械工程中的传动装置。
3. 平行四边形机构平行四边形机构由四个连杆组成,其中两个连杆平行,另外两个连杆也平行且等长。
平行四边形机构可以实现转动运动到转动运动的转换,常用于机械工程中的转向装置和变速装置。
二、平面连杆机构的运动学分析平面连杆机构的运动学分析是研究连杆与连杆之间的运动关系,其核心是解决位置、速度和加速度问题。
1. 位置分析位置分析是研究连杆在运动过程中的几何关系。
一般通过建立坐标系和运动方程来描述连杆的位置。
对于曲柄滑块机构,滑块位置可以通过曲柄的转动角度和连杆长度来确定;对于摇杆机构,可以通过摇杆的转动角度和连杆长度来确定;对于平行四边形机构,可以通过两个平行连杆的转动角度和连杆长度来确定。
2. 速度分析速度分析是研究连杆在运动过程中的速度关系。
一般通过求解连杆的速度向量和运动学方程来描述连杆的速度。
对于曲柄滑块机构,滑块的速度可以通过曲柄的角速度和连杆长度来确定;对于摇杆机构,可以通过摇杆的角速度和连杆长度来确定;对于平行四边形机构,可以通过两个平行连杆的角速度和连杆长度来确定。
平面四杆机构的基本类型及应用
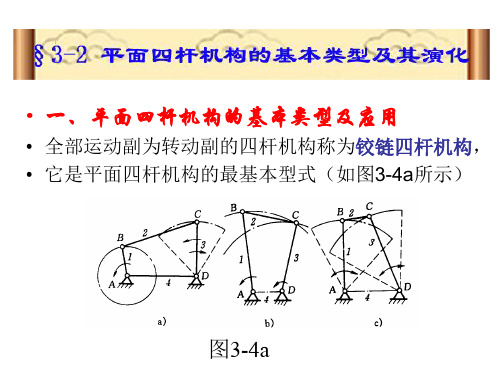
图3-15
图3—22
• 若选取构件1为机架(图3-22b), 则演化成双转块机构,它常应用 作两距离很小的平行轴的联轴器, 图3-22e所示的十字滑块联轴节为 其应用实例;
图3-22b
图3-22e
• 当选取构件3为机架(图3-22c)时, 演化成双滑块机构,常应用它作椭圆 仪(图3—22f)。
图3-22
图3-9
图3-10
• 在图3-11a所示双曲柄机构中,虽然其对应边长度 也相等,但BC杆与AD杆并不平行,两曲柄AB和 CD转动方向也相反,故称其为反平行四边形机构。 • 图 3-11b所示的车门开闭机构即为其应用实例, 它是利用反平行四边形机构运动时,两曲柄转向相 反的特性,达到两扇车门同时敞开或关闭的目的。
• 一、平面四杆机构的基本类型及应用
• 全部运动副为转动副的四杆机构称为铰链四杆机构, • 它是平面四杆机构的最基本型式(如图3-4a所示)
图3-4a
a—曲柄: 与机架相联并且作整周转动的构件; b—连杆:不与机架相联作平面运动的构件; c—摇杆:与机架相联并且作往复摆动的构件; d—机架: a、c—连架杆。
图 3-11
3、双摇杆机构
双摇杆机构:铰链四杆机构中的两连架杆均不能作 整周转动的机构。
如 图 3 - 12 所 示 鹤 式 起 重 机 的 双 摇 杆 机 构 ABCD,它可使悬挂重物作近似水平直线移动, 避免不必要的升降而消耗能量。在双摇杆机构 中,若两摇杆的长度相等称等腰梯形机构,如 图3—13中的汽车前轮转向机构。
转动导杆机构
摆动导杆机构
• 它可用于回转式油泵、牛头刨床及插床 等机器中。图3-17所示小型刨床和图3— 18 中的牛头刨床,分别是转动导杆机构 和摆动导杆机构的应用实例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面连杆机构
主要内容:平面连杆机构的类型和应用
1.平面连杆机构的特点:优点和缺点
在运动副的类型、接触方式上分析优缺点
2.平面连杆机构的类型:
铰链四杆机构、含有一个移动副的四杆机构、含有两个移动副的四杆机构
3.介绍铰链四杆机构组成和类型
由机架、连架杆、连杆组成铰链四杆机构。
如图所示、介绍如何运动4.曲柄摇杆机构运动过程
相互转换、两图对比说明
5.举例说明曲柄摇杆机构,缝纫机踏板机构
分析缝纫机运动过程
6.雷达天线俯仰机构。
实体图和结构简图
7.双曲柄机构,运动形式和平行四边形机构简图
一般形式的双曲柄机构,当主动曲柄作等速转动时,从动曲柄作变速转动。
在双曲柄机构中,若相对两杆的长度相等且平行,则称其为平行四边形机构.如图所示
8.通过添加虚约束使机构保持平行四边形机构,如图所示
9.逆平行四边形机构,车门启闭机构如图
该机构特点两曲柄转向相反
10.双摇杆机构运动形式介绍等腰梯形机构
两杆长度相等时称为等腰梯形机构,通过图例说明运动形式
11.双摇杆机构应用实例,风扇摇头机构和汽车前轮转向机构结构简图
12.含有一个移动副的四杆机构,介绍曲柄滑块机构
一个连架杆为曲柄,另一个连架杆为相对机架作往复移动的滑块,该机构称为曲柄滑块机构.曲柄滑块机构可实现曲柄整周转动和滑块的往复移动的相互转换.
当滑块的导路线通过曲柄的转动中心时,这种曲柄滑块机构称为对心曲柄滑块机构.当滑块的导路线不通过曲柄的转动中心,而是距离曲柄转动中心有偏距e时,称为偏置曲柄滑块机构.
13.对心曲柄滑块机构和偏置曲柄滑块机构的结构简图和生活中的应用
14.导杆机构的转变
通过图例表示两形式的转变
15.摆动导杆机构在牛头刨床中的应用.如图所示
在导杆机构中,当机构的长度小于曲柄的长度,导杆能作整周转动,这种导杆机构称为转动导杆机构.当机架的长度大于曲柄的长度时,导杆仅能作往复摆动,这种导杆机构称为摆动导杆机构.
16.摆动导杆机构在小型牛头刨床中的应用
17.曲柄摇块机构的结构简图,自动卸料汽车的应用
一个连架杆为曲柄,另一个连架杆为块状构件且只能作往复摆动,将这种机构称为曲柄摇块机构.
18.移动导杆机构,在实际中的应用
19.以块状构件作为机架,导杆相对机架作往复移动,将这种机构称为移动导杆机构
20.含有两个移动副的四杆机构,双滑块机构
两个连架杆均相对机架作往复移动,且都呈块状,将这种机构称为双滑块机构.
双滑块机构:
改变构件的形状和运动副
21.双转块机构简图,在联轴器中的应用
两个连架杆作定轴转动,且都呈状并与导杆成移动副,将这种机构称为双转块机构.
22.介绍正弦机构和正切机构,如图所示。