GPS-NMEA数据格式详解
GPS数据传输格式NMEA
NMEA是"National Marine Electronics Association"(国际海洋电子协会)缩写,同时也是数据传输标准工业协会,在这里,实际上应为NMEA 0183。
它是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的ASCII格式,逗点隔开数据流,数据流长度从30-100字符不等,通常以每秒间隔选择输出,最常用的格式为"GGA",它包含了定位时间,纬度,经度,高度,定位所用的卫星数,DOP 值,差分状态和校正时段等,其他的有速度,跟踪,日期等。
NMEA实际上已成为所有的GPS接收机和最通用的数据输出格式,同时它也被用于与GPS接收机接口的大多数的软件包里。
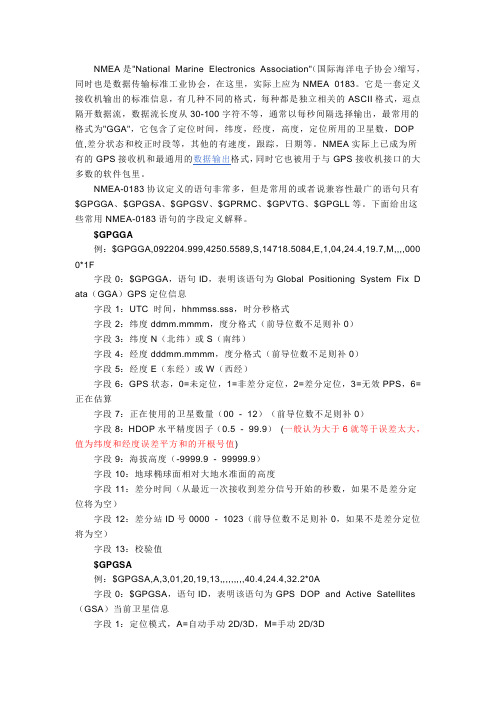
NMEA-0183协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL等。
下面给出这些常用NMEA-0183语句的字段定义解释。
$GPGGA例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,000 0*1F字段0:$GPGGA,语句ID,表明该语句为Global Positioning System Fix D ata(GGA)GPS定位信息字段1:UTC 时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段3:纬度N(北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段5:经度E(东经)或W(西经)字段6:GPS状态,0=未定位,1=非差分定位,2=差分定位,3=无效PPS,6=正在估算字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)字段8:HDOP水平精度因子(0.5 - 99.9)(一般认为大于6就等于误差太大,值为纬度和经度误差平方和的开根号值)字段9:海拔高度(-9999.9 - 99999.9)字段10:地球椭球面相对大地水准面的高度字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)字段13:校验值$GPGSA例:$GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段0:$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites (GSA)当前卫星信息字段1:定位模式,A=自动手动2D/3D,M=手动2D/3D字段2:定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段4:PRN码(伪随机噪声码),第2信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段5:PRN码(伪随机噪声码),第3信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段6:PRN码(伪随机噪声码),第4信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段7:PRN码(伪随机噪声码),第5信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段8:PRN码(伪随机噪声码),第6信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段9:PRN码(伪随机噪声码),第7信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段10:PRN码(伪随机噪声码),第8信道正在使用的卫星PRN码编号(0 0)(前导位数不足则补0)字段11:PRN码(伪随机噪声码),第9信道正在使用的卫星PRN码编号(0 0)(前导位数不足则补0)字段12:PRN码(伪随机噪声码),第10信道正在使用的卫星PRN码编号(0 0)(前导位数不足则补0)字段13:PRN码(伪随机噪声码),第11信道正在使用的卫星PRN码编号(0 0)(前导位数不足则补0)字段14:PRN码(伪随机噪声码),第12信道正在使用的卫星PRN码编号(0 0)(前导位数不足则补0)字段15:PDOP综合位置精度因子(0.5 - 99.9)字段16:HDOP水平精度因子(0.5 - 99.9)字段17:VDOP垂直精度因子(0.5 - 99.9)字段18:校验值$GPGSV例:$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70 字段0:$GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息字段1:本次GSV语句的总数目(1 - 3)字段2:本条GSV语句是本次GSV语句的第几条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不足则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段5:卫星仰角(00 - 90)度(前导位数不足则补0)字段6:卫星方位角(00 - 359)度(前导位数不足则补0)字段7:信噪比(00-99)dbHz字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段9:卫星仰角(00 - 90)度(前导位数不足则补0)字段10:卫星方位角(00 - 359)度(前导位数不足则补0)字段11:信噪比(00-99)dbHz字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段13:卫星仰角(00 - 90)度(前导位数不足则补0)字段14:卫星方位角(00 - 359)度(前导位数不足则补0)字段15:信噪比(00-99)dbHz字段16:校验值$GPRMC例:$GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,15070 6,,,A*50字段0:$GPRMC,语句ID,表明该语句为Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最小定位信息字段1:UTC时间,hhmmss.sss格式字段2:状态,A=定位,V=未定位字段3:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段4:纬度N(北纬)或S(南纬)字段5:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段6:经度E(东经)或W(西经)字段7:速度,节,Knots字段8:方位角,度字段9:UTC日期,DDMMYY格式字段10:磁偏角,(000 - 180)度(前导位数不足则补0)字段11:磁偏角方向,E=东W=西字段16:校验值$GPVTG例:$GPVTG,89.68,T,,M,0.00,N,0.0,K*5F字段0:$GPVTG,语句ID,表明该语句为Track Made Good and Ground S peed(VTG)地面速度信息字段1:运动角度,000 - 359,(前导位数不足则补0)字段2:T=真北参照系字段3:运动角度,000 - 359,(前导位数不足则补0)字段4:M=磁北参照系字段5:水平运动速度(0.00)(前导位数不足则补0)字段6:N=节,Knots字段7:水平运动速度(0.00)(前导位数不足则补0)字段8:K=公里/时,km/h字段9:校验值$GPGLL例:$GPGLL,4250.5589,S,14718.5084,E,092204.999,A*2D字段0:$GPGLL,语句ID,表明该语句为Geographic Position(GLL)地理定位信息字段1:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段2:纬度N(北纬)或S(南纬)字段3:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段4:经度E(东经)或W(西经)字段5:UTC时间,hhmmss.sss格式字段6:状态,A=定位,V=未定位字段7:校验值。
NMEA标准输出——GPS数据格式标准

NMEA-0183标准NMEA‐0183NMEA 0183 是美国国家海洋子会〔 National Marine Electronics Association 〕海用子拟定的准格式。
当前已成了 GPS航一的 RTCM〔 Radio TechnicalCommission for Maritime services〕准。
序号命令明最大1$GPGGA全球定位数据722$GPGSA星 PRN数据653$GPGSV星状信息2104$GPRMC运定位数据705$GPVTG地面速度信息346$GPGLL大地坐信息7$GPZDA UTC和日期注:送次序 $PZDA、 $GPGGA、 $GPGLL、$GPVTG、$GPGSA、 $GPGSV*3、 $GPRMC 明:采用 ASCII,其串行通信默参数:波特率 =4800bps,数据位 =8bit,开始位 =1bit,停止位 =1bit,无奇偶校。
格式形如: $aaccc,ddd,ddd, ⋯,ddd*hh<CR><LF>1、“ $〞——命令初步位2、aaccc ——地址域,前两位符,后三位句名3、ddd⋯ ddd——数据4、“ * 〞——校和前5、hh——校和〔 checksum〕, $与* 之所有字符 ASCII的校和〔各字做异或运算,获取校和后,再 16 制格式的 ASCII字符。
〕6、<CR><LF>—— CR〔Carriage Return〕 + LF〔 Line Feed〕束,回和行GPGGAGPS固定数据出句,是一GPS定位的主要数据,也是使用最广的数据。
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*<15><CR><LF><1> UTC,格式。
Gps协议解析

GPS卫星定位接收器的NMEA协议解析GPS接收机只要处于工作状态就会源源不断地把接收并计算出的GPS导航定位信息通过串口传送到计算机中。
前面的代码只负责从串口接收数据并将其放置于缓存,在没有进一步处理之前缓存中是一长串字节流,这些信息在没有经过分类提取之前是无法加以利用的。
因此,必须通过程序将各个字段的信息从缓存字节流中提取出来,将其转化成有实际意义的,可供高层决策使用的定位信息数据。
同其他通讯协议类似,对GPS进行信息提取必须首先明确其帧结构,然后才能根据其结构完成对各定位信息的提取。
对于本文所使用的GARMIN GPS天线板,其发送到计算机的数据主要由帧头、帧尾和帧内数据组成,根据数据帧的不同,帧头也不相同,主要有"$GPGGA"、"$GPGSA"、"$ GPGSV"以及"$GPRMC"等。
这些帧头标识了后续帧内数据的组成结构,各帧均以回车符和换行符作为帧尾标识一帧的结束。
对于通常的情况,我们所关心的定位数据如经纬度、速度、时间等均可以从"$GPRMC"帧中获取得到,该帧的结构及各字段释义如下:$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>*hh<1> 当前位置的格林尼治时间,格式为hhmmss<2> 状态, A 为有效位置, V为非有效接收警告,即当前天线视野上方的卫星个数少于3颗。
<3> 纬度, 格式为ddmm.mmmm<4> 标明南北半球, N 为北半球、S为南半球<5> 径度,格式为dddmm.mmmm<6> 标明东西半球,E为东半球、W为西半球<7> 地面上的速度,范围为0.0到999.9<8> 方位角,范围为000.0到 359.9 度<9> 日期, 格式为ddmmyy<10> 地磁变化,从000.0到 180.0 度<11> 地磁变化方向,为E 或 W至于其他几种帧格式,除了特殊用途外,平时并不常用,虽然接收机也在源源不断地向主机发送各种数据帧,但在处理时一般先通过对帧头的判断而只对"$GPRMC"帧进行数据的提取处理。
2024版一文读懂GPSNMEA

20XX 专业合同封面COUNTRACT COVER甲方:XXX乙方:XXX2024版一文读懂GPSNMEA 本合同目录一览1. 定义与术语解释1.1 GPSNMEA的定义1.2 合同双方的身份和信息1.3 相关术语的解释2. 合同的条款和条件2.1 合同的有效期2.2 双方的权利和义务2.3 合同的修改和终止3. GPSNMEA的使用和功能3.1 GPSNMEA的使用范围3.2 GPSNMEA的功能描述3.3 GPSNMEA的技术参数4. 技术支持和维护服务4.1 技术支持的提供4.2 维护服务的实施4.3 服务响应时间和处理流程5. 合同的价格和支付条款5.1 合同价格的确定5.2 支付方式和支付时间5.3 发票的出具和支付6. 违约责任6.1 双方违约的情形6.2 违约责任的计算和赔偿6.3 违约解决的流程7. 争议解决7.1 争议解决的途径7.2 仲裁的地点和规则7.3 法律适用8. 保密条款8.1 保密信息的定义8.2 保密信息的保护措施8.3 保密信息的例外情况9. 法律和监管要求9.1 合同遵守的法律9.2 合同的监管要求9.3 法律变更的影响10. 一般条款10.1 通知和通讯10.2 合同的完整性和可分割性10.3 合同的转让11. 保险11.1 保险的购买和维持11.2 保险事故的通知和处理11.3 保险赔偿的分配12. 知识产权12.1 知识产权的保护12.2 知识产权的使用权限12.3 知识产权侵权的责任13. 附件和附录13.1 合同附件的说明13.2 附录内容的列举13.3 附件和附录的法律效力14. 签署页14.1 双方签署的合同正本14.2 双方签署的合同副本14.3 签署日期和地点的记录第一部分:合同如下:第一条定义与术语解释1.1 GPSNMEA的定义GPSNMEA是全球定位系统(Global Positioning System)的导航信息(Navigation Message)的缩写,是指由GPS卫星发射的一种数据格式,包含了卫星的时间、位置、速度等导航信息。
标准NMEA协议

标准NMEA协议协议名称:标准NMEA协议一、引言标准NMEA协议是一种用于全球定位系统(GPS)设备和其他导航设备之间进行数据通信的协议。
该协议定义了一系列数据格式和通信规则,以确保不同设备之间的数据交换的一致性和互操作性。
本协议旨在提供一种通用的数据交换标准,使得不同厂商的设备能够无缝地进行数据交互。
二、协议结构标准NMEA协议采用文本格式进行数据传输,每条数据以"$"符号开头,以回车换行符"\r\n"结尾。
数据的内容由逗号分隔的字段组成,每个字段代表一个特定的数据类型。
三、数据格式标准NMEA协议定义了多种数据格式,以下是其中几种常用的数据格式:1. GGA(地理定位信息)格式:- 数据格式:$GPGGA,UTC时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,水平精度因子,天线离海平面的高度,大地水准面偏移量,差分GPS数据期限,差分参考站ID,校验和<CR><LF>- 示例:$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*472. GLL(经纬度和UTC时间数据)格式:- 数据格式:$GPGLL,纬度,纬度半球,经度,经度半球,UTC时间,定位状态,校验和<CR><LF>- 示例:$GPGLL,4916.45,N,12311.12,W,225444,A,*1D3. RMC(推荐最小定位信息)格式:- 数据格式:$GPRMC,UTC时间,定位状态,纬度,纬度半球,经度,经度半球,速度,航向,UTC日期,磁偏角,磁偏角方向,模式指示,校验和<CR><LF>- 示例:$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W,*6A四、通信规则1. 数据发送频率:设备应按照预定的频率发送数据,以确保及时更新和数据的准确性。
NMEA 标准输出——GPS数据格式标准

NMEA-0183标准NMEA‐0183NMEA 0183是美国国家海洋电子协会(National Marine Electronics Association )为海用电子设备制定的标准格式。
目前业已成了GPS导航设备统一的RTCM(Radio Technical Commission for Maritime services)标准协议。
序号命令说明最大帧长1 $GPGGA 全球定位数据 722 $GPGSA 卫星PRN数据 653 $GPGSV 卫星状态信息 2104 $GPRMC 运输定位数据 705 $GPVTG 地面速度信息 346 $GPGLL 大地坐标信息7 $GPZDA UTC时间和日期注:发送次序$PZDA、$GPGGA、$GPGLL、$GPVTG、$GPGSA、$GPGSV*3、$GPRMC协议帧总说明:该协议采用ASCII码,其串行通信默认参数为:波特率=4800bps,数据位=8bit,开始位=1bit,停止位=1bit,无奇偶校验。
帧格式形如:$aaccc,ddd,ddd,…,ddd*hh<CR><LF>1、“$”——帧命令起始位2、aaccc——地址域,前两位为识别符,后三位为语句名3、ddd…ddd——数据4、“*”——校验和前缀5、hh——校验和(check sum),$与*之间所有字符ASCII码的校验和(各字节做异或运算,得到校验和后,再转换16进制格式的ASCII字符。
)6、<CR><LF>——CR(Carriage Return) + LF(Line Feed)帧结束,回车和换行GPGGAGPS固定数据输出语句,这是一帧GPS定位的主要数据,也是使用最广的数据。
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>,<13>,<14>*<15><CR><LF><1> UTC时间,格式为hhmmss.sss。
GPS数据格式详解

GPS数据格式详解第一篇:GPS数据格式详解GPS数据格式(2009-05-15 11:15:05)一、NMEA0183标准语句1、Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10 >,M,<11>,<12>*hh <1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算 <7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)2、GPS DOP and Active Satellites(GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3 >,<3>,<3>,<3>,<4>,<5>,<6>*hh <1> 模式,M=手动,A=自动<2> 定位类型,1=没有定位,2=2D定位,3=3D定位<3> PRN码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的0也将被传输)。
NMEA协议
NMEA协议协议名称:NMEA协议一、引言NMEA协议是一种用于全球定位系统(GPS)接收器和其他导航设备之间进行数据交换的通信协议。
该协议定义了数据格式、语法和传输规则,以确保设备之间的数据互操作性和兼容性。
本协议旨在详细描述NMEA协议的标准格式和规范。
二、协议版本当前最新版本的NMEA协议为NMEA 0183。
三、协议结构NMEA协议的数据格式由数据字段和控制字符组成。
每个数据字段以逗号分隔,以确保数据的准确性和一致性。
以下是NMEA协议的标准格式:1. 数据字段NMEA协议中的数据字段包括以下几种类型:- 语句类型(Sentence Type):指定数据的类型和用途,通常由两个字母表示。
- 数据字段(Data Field):包含有关定位和导航的具体数据,如经度、纬度、速度等。
- 校验和(Checksum):用于验证数据的完整性,采用十六进制表示。
2. 控制字符NMEA协议中使用的控制字符包括以下几种:- 开始字符(Start Character):以"$"符号开头,用于标识数据字段的开始。
- 结束字符(End Character):以换行符(LF)和回车符(CR)结尾,用于标识数据字段的结束。
四、数据类型NMEA协议支持多种数据类型,包括但不限于以下几种:1. GGA(Global Positioning System Fix Data):包含有关GPS定位的基本信息,如纬度、经度、海拔高度等。
2. RMC(Recommended Minimum Navigation Information):包含有关导航信息的基本数据,如日期、时间、速度等。
3. VTG(Course Over Ground and Ground Speed):包含有关船舶或车辆的航向和速度信息。
4. GSA(GPS DOP and Active Satellites):包含有关GPS接收器的状态和卫星信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NMEA dataTable of Contents•Introduction•Hardware connection•NMEA sentences•Decodes of some position sentences•Decodes of some navigation sentences•Decodes of a few other sentences•Decodes of some proprietary sentences•Sample StreamsDisclaimerThis site is based on personal research and is believed to be accurate but there is no guarantee that any of the information is correct or suitable for any purpose. I have been told by the NMEA folks that my information is old and out of date. The current version of NMEA at the time I wrote this is 3.01 which is not described here. This site is for historical information and is not intended to be used for any official purpose. For official data please contact the NMEA web site. Please see the bottom of this article for the sources of this data.IntroductionThe National Marine Electronics Association (NMEA) has developed a specification that defines the interface between various pieces of marine electronic equipment. The standard permits marine electronics to send information to computers and to other marine equipment. A full copy of this standard is available for purchase at their web site. None of the information on this site comes from this standard and I do not have a copy. Anyone attempting to design anything to this standard should obtain an official copy.GPS receiver communication is defined within this specification. Most computer programs that provide real time position information understand and expect data to be in NMEA format. This data includes the complete PVT (position, velocity, time) solution computed by the GPS receiver. The idea of NMEA is to send a line of data called a sentence that is totally self contained and independent from other sentences. There are standard sentences for each device category and there is also the ability to defineproprietary sentences for use by the individual company. All of the standard sentences have a two letter prefix that defines the device that uses that sentence type. (For gps receivers the prefix is GP.) which is followed by a three letter sequence that defines the sentence contents. In addition NMEA permits hardware manufactures to define their own proprietary sentences for whatever purpose they see fit. All proprietary sentences begin with the letter P and are followed with 3 letters that identifies the manufacturer controlling that sentence. For example a Garmin sentence would start with PGRM and Magellan would begin with PMGN.Each sentence begins with a '$' and ends with a carriage return/line feed sequence and can be no longer than 80 characters of visible text (plus the line terminators). The data is contained within this single line with data items separated by commas. The data itself is just ascii text and may extend over multiple sentences in certain specialized instances but is normally fully contained in one variable length sentence. The data may vary in the amount of precision contained in the message. For example time might be indicated to decimal parts of a second or location may be show with 3 or even 4 digits after the decimal point. Programs that read the data should only use the commas to determine the field boundaries and not depend on column positions. There is a provision for a checksum at the end of each sentence which may or may not be checked by the unit that reads the data. The checksum field consists of a '*' and two hex digits representing an 8 bit exclusive OR of all characters between, but not including, the '$' and '*'. A checksum is required on some sentences.There have been several changes to the standard but for gps use the only ones that are likely to be encountered are 1.5 and 2.0 through 2.3. These just specify some different sentence configurations which may be peculiar to the needs of a particular device thus the gps may need to be changed to match the devices being interfaced to. Some gps's provide the ability configure a custom set the sentences while other may offer a set of fixed choices. Many gps receivers simply output a fixed set of sentences that cannot be changed by the user. The current version of the standard is 3.01.I have no specific information on this version, but I am not aware of any GPS products that require conformance to this version.Hardware ConnectionThe hardware interface for GPS units is designed to meet the NMEA requirements. They are also compatible with most computer serial ports using RS232 protocols, however strictly speaking the NMEA standard is not RS232. They recommend conformance to EIA-422. The interface speed can be adjusted on some models but the NMEA standard is 4800 b/s (bit per secondrate) with 8 bits of data, no parity, and one stop bit. All units that support NMEA should support this speed. Note that, at a b/s rate of 4800, you can easily send enough data to more than fill a full second of time. For this reason some units only send updates every two seconds or may send some data every second while reserving other data to be sent less often. In addition some units may send data a couple of seconds old while other units may send data that is collected within the second it is sent. Generally time is sent in some field within each second so it is pretty easy to figure out what a particular gps is doing. Some sentences may be sent only during a particular action of the receiver such as while following a route while other receivers may always send the sentence and just null out the values. Other difference will be noted in the specific data descriptions defined later in the text.At 4800 b/s you can only send 480 characters in one second. Since an NMEA sentence can be as long as 82 characters you can be limited to less than 6 different sentences. The actual limit is determined by the specific sentences used, but this shows that it is easy to overrun the capabilities if you want rapid sentence response. NMEA is designed to run as a process in the background spitting out sentences which are then captured as needed by the using program. Some programs cannot do this and these programs will sample the data stream, then use the data for screen display, and then sample the data again. Depending on the time needed to use the data there can easily be a lag of 4 seconds in the responsiveness to changed data. This may be fine in some applications but totally unacceptable in others. For example a car traveling at 60 mph will travel 88 feet in one second. Several second delays could make the entire system seem unresponsive and could cause you to miss your turn.The NMEA standard has been around for many years (1983) and has undergone several revisions. The protocol has changed and the number and types of sentences may be different depending on the revision. Most GPS receivers understand the standard which is called: 0183 version 2. This standard dictates a transfer rate of 4800 b/s. Some receivers also understand older standards. The oldest standard was 0180 followed by 0182 which transferred data at 1200 b/s. An earlier version of 0183 called version 1.5 is also understood by some receivers. Some Garmin units and other brands can be set to 9600 for NMEA output or even higher but this is only recommended if you have determined that 4800 works ok and then you can try to set it faster. Setting it to run as fast as you can may improve the responsiveness of the program.In order to use the hardware interface you will need a cable. Generally the cable is unique to the hardware model so you will need an cable made specifically for the brand and model of the unit you own. Some of the latestcomputers no longer include a serial port but only a USB port. Most gps receivers will work with Serial to USB adapters and serial ports attached via the pcmcia (pc card) adapter. For general NMEA use with a gps receiver you will only need two wires in the cable, data out from the gps and ground.A third wire, Data in, will be needed if you expect the receiver to accept data on this cable such as to upload waypoints or send DGPS data to the receiver.GPS receivers may be used to interface with other NMEA devices such as autopilots, fishfinders, or even another gps receivers. They can also listen to Differential Beacon Receivers that can send data using the RTCM SC-104 standard. This data is consistent with the hardware requirements for NMEA input data. There are no handshake lines defined for NMEA.NMEA sentencesNMEA consists of sentences, the first word of which, called a data type, defines the interpretation of the rest of the sentence. Each Data type would have its own unique interpretation and is defined in the NMEA standard. The GGA sentence (shown below) shows an example that provides essential fix data. Other sentences may repeat some of the same information but will also supply new data. Whatever device or program that reads the data can watch for the data sentence that it is interested in and simply ignore other sentences that is doesn't care about. In the NMEA standard there are no commands to indicate that the gps should do something different. Instead each receiver just sends all of the data and expects much of it to be ignored. Some receivers have commands inside the unit that can select a subset of all the sentences or, in some cases, even the individual sentences to send. There is no way to indicate anything back to the unit as to whether the sentence is being read correctly or to request a re-send of some data you didn't get. Instead the receiving unit just checks the checksum and ignores the data if the checksum is bad figuring the data will be sent again sometime later.There are many sentences in the NMEA standard for all kinds of devices that may be used in a Marine environment. Some of the ones that have applicability to gps receivers are listed below: (all message start with GP.)•AAM - Waypoint Arrival Alarm•ALM - Almanac data•APA - Auto Pilot A sentence•APB - Auto Pilot B sentence•BOD - Bearing Origin to Destination•BWC - Bearing using Great Circle route•DTM - Datum being used.•GGA - Fix information•GLL - Lat/Lon data•GRS - GPS Range Residuals•GSA - Overall Satellite data•GST - GPS Pseudorange Noise Statistics•GSV - Detailed Satellite data••MSK - send control for a beacon receiver•MSS - Beacon receiver status information.•RMA - recommended Loran data•RMB - recommended navigation data for gps•RMC - recommended minimum data for gps•RTE - route message•TRF - Transit Fix Data•STN - Multiple Data ID•VBW - dual Ground / Water Spped•VTG - Vector track an Speed over the Ground•WCV - Waypoint closure velocity (Velocity Made Good)•WPL - Waypoint Location information•XTC - cross track error•XTE - measured cross track error•ZTG - Zulu (UTC) time and time to go (to destination)•ZDA - Date and TimeSome gps receivers with special capabilities output these special messages.•HCHDG - Compass output•PSLIB - Remote Control for a DGPS receiverIn addition some GPS receivers can mimic Loran-C receivers by outputing the LC prefix in some of their messages so that they can be used to interface to equipment that is expecting this prefix instead of the GP one.The last version 2 iteration of the NMEA standard was 2.3. It added a mode indicator to several sentences which is used to indicate the kind of fix the receiver currently has. This indication is part of the signal integrity information needed by the FAA. The value can be A=autonomous, D=differential, E=Estimated, N=not valid, S=Simulator. Sometimes there can be a null value as well. Only the A and D values will correspond to an Active and reliable Sentence. This mode character has been added tothe RMC, RMB, VTG, and GLL, sentences and optionally some others including the BWC and XTE sentences.If you are interfacing a GPS unit to another device, including a computer program, you need to ensure that the receiving unit is given all of the sentences that it needs. If it needs a sentence that your GPS does not send then the interface to that unit is likely to fail. Here is a Link for the needs of some typical programs. The sentences sent by some typical receivers include:NMEA 2.0Name Garmin Magellan Lowrance SiRF Notes:GPAPB N Y Y N Auto Pilot BGPBOD Y N N N bearing, origin to destination - earlier G-12's do not transmit thisGPGGA Y Y Y Y fix dataGPGLL Y Y Y Y Lat/Lon data - earlier G-12's do not transmit thisGPGSA Y Y Y Y overall satellite reception data, missing on some Garmin modelsGPGSV Y Y Y Y detailed satellite data, missing on some Garmin modelsGPRMB Y Y Y N minimum recommended data when following a routeGPRMC Y Y Y Y minimum recommended dataGPRTE Y U U N route data, only when there is an active route. (this is sometimes bidirectional)GPWPL Y Y U N waypoint data, only when there is an active route (this is sometimes bidirectional)NMEA 1.5 - some units do not support version 1.5. Lowrance units provide the ability to customize the NMEA output by sentences so that you can develop your own custom sentence structure.Name Garmin Magellan Notes:GPAPA N Y Automatic Pilot AGPBOD Y N bearing origin to destination - earlier G-12's donot send thisGPBWC Y Y bearing to waypoint using great circle route. GPGLL Y Y lat/lon - earlier G-12's do not send this GPRMC Y N minimum recommend dataGPRMB Y N minimum recommended data when following a route GPVTG Y Y vector track and speed over groundGPWPL Y N waypoint data (only when active goto)GPXTE Y Y cross track errorThe NMEA 2.3 output from the Garmin Legend, Vista, and perhaps some others include the BWC, VTG, and XTE sentences.The Trimble Scoutmaster outputs: APA, APB, BWC, GGA, GLL, GSA, GSV, RMB, RMC, VTG, WCV, XTE, ZTG.The Motorola Encore outputs: GGA, GLL, GSV, RMC, VTG, ZDA and a proprietary sentence PMOTG.Units based on the SiRF chipset can output: GGA, GLL, GSA, GSV, RMC, and VTG. What is actually output is based on which sentences are selected by the user or application program. See below for more details. Some implementations have enhanced the SiRF capabilities with other sentences as well by changing the firmware. For example, the u-blox receivers add ZDA and some proprietary sentences to the above list of sentences. Check your documentation for more details.Garmin receivers send the following Proprietary Sentences: •PGRME (estimated error) - not sent if set to 0183 1.5•PGRMM (map datum)•PGRMZ (altitude)•PSLIB (beacon receiver control)Note that Garmin converts lat/lon coordinates to the datum chosen by the user when sending this data. This is indicated in the proprietary sentence PGRMM. This can help programs that use maps with other datums but is not an NMEA standard. Be sure and set your datum to WGS84 on Garmin units when communicating to other NMEA devices.Magellan also converts lat/lon coordinates to the datum chosen on the receiver but do not indicate this in a message. Magellan units use proprietary sentences for waypoint maintenance and other tasks. They use a prefix of PMGN for this data.Most other units always output NMEA messages in the WGS84 datum. Be sure and check the user documentation to be sure.It is possible to just view the information presented on the NMEA interface using a simple terminal program. If the terminal program can log the session then you can build a history of the entire session into a file. More sophisticated logging programs can filter the messages to only certain sentences or only collect sentences at prescribed intervals. Some computer programs that provide real time display and logging actually save the log in an ascii format that can be viewed with a text editor or used independently from the program that generated it.NMEA inputSome units also support an NMEA input mode. While not too many programs support this mode it does provide a standardized way to update or add waypoint and route data. Note that there is no handshaking or commands in NMEA mode so you just send the data in the correct sentence and the unit will accept the data and add or overwrite the information in memory. If the data is not in the correct format it will simply be ignored. A carriage return/line feed sequence is required. If the waypoint name is the same you will overwrite existing data but no warning will be issued. The sentence construction is identical to what the unit downloads so you can, for example, capture a WPL sentence from one unit and then send that same sentence to another unit but be careful if the two units support waypoint names of different lengths since the receiving unit might truncate the name and overwrite a waypoint accidently. If you create a sentence from scratch you should create a correct checksum. Be sure you know and have set you unit to the correct datum. Many units support the input of WPL sentences and a few support RTE as well.On NMEA input the receiver stores information based on interpreting the sentence itself. While some receivers accept standard NMEA input this can only be used to update a waypoint or similar task and not to send a command to the unit. Proprietary input sentences could be used to send commands. Since the Magellan upload and download maintenance protocol is based on NMEA sentences they support a modified WPL message that adds comments, altitude, and icon data.Some marine units may accept input for alarms such as deep or shallow water based on the DPT sentence or MTW to read the water temperature. For example the Garmin Map76 supports DPT, MTW (temperature), and VHW (speed) input sentences. Other units may use NMEA input to provide initialization data via proprietary sentences, or to select which NMEA sentences to output.Decode of selected position sentencesThe most important NMEA sentences include the GGA which provides the current Fix data, the RMC which provides the minimum gps sentences information, and the GSA which provides the Satellite status data.GGA - essential fix data which provide 3D location and accuracy data.$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47Where:GGA Global Positioning System Fix Data123519 Fix taken at 12:35:19 UTC4807.038,N Latitude 48 deg 07.038' N01131.000,E Longitude 11 deg 31.000' E1 Fix quality: 0 = invalid1 = GPS fix (SPS)2 = DGPS fix3 = PPS fix4 = Real Time Kinematic5 = Float RTK6 = estimated (dead reckoning) (2.3 feature)7 = Manual input mode8 = Simulation mode08 Number of satellites being tracked0.9 Horizontal dilution of position545.4,M Altitude, Meters, above mean sea level46.9,M Height of geoid (mean sea level) above WGS84ellipsoid(empty field) time in seconds since last DGPS update(empty field) DGPS station ID number*47 the checksum data, always begins with *If the height of geoid is missing then the altitude should be suspect. Some non-standard implementations report altitude with respect to the ellipsoid rather than geoid altitude. Some units do not report negative altitudes at all. This is the only sentence that reports altitude.GSA - GPS DOP and active satellites. This sentence provides details on the nature of the fix. It includes the numbers of the satellites being used in the current solution and the DOP. DOP (dilution of precision) is an indication of the effect of satellite geometry on the accuracy of the fix. It is a unitless number where smaller is better. For 3D fixes using4 satellites a 1.0 would be considered to be a perfect number, however for overdetermined solutions it is possible to see numbers below 1.0.There are differences in the way the PRN's are presented which can effect the ability of some programs to display this data. For example, in the example shown below there are 5 satellites in the solution and the null fields are scattered indicating that the almanac would show satellites in the null positions that are not being used as part of this solution. Other receivers might output all of the satellites used at the beginning of the sentence with the null field all stacked up at the end. This difference accounts for some satellite display programs not always being able to display the satellites being tracked. Some units may show all satellites that have ephemeris data without regard to their use as part of the solution but this is non-standard.$GPGSA,A,3,04,05,,09,12,,,24,,,,,2.5,1.3,2.1*39Where:GSA Satellite statusA Auto selection of 2D or 3D fix (M = manual)3 3D fix - values include: 1 = no fix2 = 2D fix3 = 3D fix04,05... PRNs of satellites used for fix (space for 12)2.5 PDOP (dilution of precision)1.3 Horizontal dilution of precision (HDOP)2.1 Vertical dilution of precision (VDOP)*39 the checksum data, always begins with *GSV - Satellites in View shows data about the satellites that the unit might be able to find based on its viewing mask and almanac data. It also shows current ability to track this data. Note that one GSV sentence only can provide data for up to 4 satellites and thus there may need to be 3 sentences for the full information. It is reasonable for the GSV sentence to contain more satellites than GGA might indicate since GSV may include satellites that are not used as part of the solution. It is not a requirment that the GSV sentences all appear in sequence. To avoid overloading the data bandwidth some receivers may place the various sentences in totally different samples since each sentence identifies which one it is.The field called SNR (Signal to Noise Ratio) in the NMEA standard is often referred to as signal strength. SNR is an indirect but more useful value that raw signal strength. It can range from 0 to 99 and has units of dB according to the NMEA standard, but the various manufacturers send different ranges of numbers with different starting numbers so the valuesthemselves cannot necessarily be used to evaluate different units. The range of working values in a given gps will usually show a difference of about 25 to 35 between the lowest and highest values, however 0 is a special case and may be shown on satellites that are in view but not being tracked.$GPGSV,2,1,08,01,40,083,46,02,17,308,41,12,07,344,39,14,22,228,45*75Where:GSV Satellites in view2 Number of sentences for full data1 sentence 1 of 208 Number of satellites in view01 Satellite PRN number40 Elevation, degrees083 Azimuth, degrees46 SNR - higher is betterfor up to 4 satellites per sentence*75 the checksum data, always begins with *RMC - NMEA has its own version of essential gps pvt (position, velocity, time) data. It is called RMC, The Recommended Minimum, which will look similar to:$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W*6AWhere:RMC Recommended Minimum sentence C123519 Fix taken at 12:35:19 UTCA Status A=active or V=Void.4807.038,N Latitude 48 deg 07.038' N01131.000,E Longitude 11 deg 31.000' E022.4 Speed over the ground in knots084.4 Track angle in degrees True230394 Date - 23rd of March 1994003.1,W Magnetic Variation*6A The checksum data, always begins with *Note that, as of the 2.3 release of NMEA, there is a new field in the RMC sentence at the end just prior to the checksum. For more information on this field see here.GLL- Geographic Latitude and Longitude is a holdover from Loran data and some old units may not send the time and data active information if they are emulating Loran data. If a gps is emulating Loran data they may use the LC Loran prefix instead of GP.$GPGLL,4916.45,N,12311.12,W,225444,A,*1DWhere:GLL Geographic position, Latitude and Longitude4916.46,N Latitude 49 deg. 16.45 min. North12311.12,W Longitude 123 deg. 11.12 min. West225444 Fix taken at 22:54:44 UTCA Data Active or V (void)*iD checksum dataNote that, as of the 2.3 release of NMEA, there is a new field in the GLL sentence at the end just prior to the checksum. For more information on this field see here.VTG - Velocity made good. The gps receiver may use the LC prefix instead of GP if it is emulating Loran output.$GPVTG,054.7,T,034.4,M,005.5,N,010.2,K*48where:VTG Track made good and ground speed054.7,T True track made good (degrees)034.4,M Magnetic track made good005.5,N Ground speed, knots010.2,K Ground speed, Kilometers per hour*48 ChecksumNote that, as of the 2.3 release of NMEA, there is a new field in the VTG sentence at the end just prior to the checksum. For more information on this field see here.Receivers that don't have a magnetic deviation (variation) table built in will null out the Magnetic track made good.Decode of some Navigation SentencesWPL - Waypoint Location data provides essential waypoint data. It is output when navigating to indicate data about the destination and is sometimes supported on input to redefine a waypoint location. Note thatwaypoint data as defined in the standard does not define altitude, comments, or icon data. When a route is active, this sentence is sent once for each waypoint in the route, in sequence. When all waypoints have been reported, the RTE sentence is sent in the next data set. In any group of sentences, only one WPL sentence, or an RTE sentence, will be sent.$GPWPL,4807.038,N,01131.000,E,WPTNME*5CWith an interpretation of:WPL Waypoint Location4807.038,N Latitude01131.000,E LongitudeWPTNME Waypoint Name*5C The checksum data, always begins with *AAM - Waypoint Arrival Alarm is generated by some units to indicate the Status of arrival (entering the arrival circle, or passing the perpendicular of the course line) at the destination waypoint.$GPAAM,A,A,0.10,N,WPTNME*32Where:AAM Arrival AlarmA Arrival circle enteredA Perpendicular passed0.10 Circle radiusN Nautical milesWPTNME Waypoint name*32 Checksum dataAPB - Autopilot format B is sent by some gps receivers to allow them to be used to control an autopilot unit. This sentence is commonly used by autopilots and contains navigation receiver warning flag status, cross-track-error, waypoint arrival status, initial bearing from origin waypoint to the destination, continuous bearing from present position to destination and recommended heading-to-steer to destination waypoint for the active navigation leg of the journey.Note: some autopilots, Robertson in particular, misinterpret "bearing from origin to destination" as "bearing from present position to destination". This is likely due to the difference between the APB sentence and the APA sentence. for the APA sentence this would be the correct thing to do for the data in the same field. APA only differs from APB in this one field and APA leaves off the last two fields where thisdistinction is clearly spelled out. This will result in poor performance if the boat is sufficiently off-course that the two bearings are different.$GPAPB,A,A,0.10,R,N,V,V,011,M,DEST,011,M,011,M*3Cwhere:APB Autopilot format BA Loran-C blink/SNR warning, general warningA Loran-C cycle warning0.10 cross-track error distanceR steer Right to correct (or L for Left)N cross-track error units - nautical miles (K for kilometers) V arrival alarm - circleV arrival alarm - perpendicular011,M magnetic bearing, origin to destinationDEST destination waypoint ID011,M magnetic bearing, present position to destination011,M magnetic heading to steer (bearings could True as 033,T)BOD- Bearing - Origin to Destination shows the bearing angle of the line, calculated at the origin waypoint, extending to the destination waypoint from the origin waypoint for the active navigation leg of the journey.$GPBOD,045.,T,023.,M,DEST,START*01where:BOD Bearing - origin to destination waypoint045.,T bearing 045 True from "START" to "DEST"023.,M bearing 023 Magnetic from "START" to "DEST"DEST destination waypoint IDSTART origin waypoint ID*01 checksumBWC- Bearing & Distance to Waypoint using a Great Circle route. Time (UTC) and distance & bearing to, and location of, a specified waypoint from present position along the great circle path.$GPBWC,225444,4917.24,N,12309.57,W,051.9,T,031.6,M,001.3,N,004*29where:BWC Bearing and distance to waypoint - great circle 225444 UTC time of fix 22:54:444917.24,N Latitude of waypoint12309.57,W Longitude of waypoint。