电机与运动控制系统第二版罗应立课后答案
电机与拖动课后习题答案(第二版)
第一章第一章 21.解:解:NN N N I U P h ´´´=-310N N N N U kw P I h ´´=310)(A9.9085.022*******=´´=KWI U P NNN20109.9022010331=´´=´´=--24.解:.解:1)WI U P N N N 176********=´=´= 2)W P P N N N 1496085.0176001=´=´=h 3)W P P p N N 26401=-=S 4)WR I p aacu6401.08022=´==5)W R U R I p f ff f cuf 05.5458.88220222====6) W P p N ad 6.14901.0=´=7) Wp p p p p ad cu Fe m 1850=--S =+25. 解:解:1)m N r n KW P m N T N N N ×=´==×12.543000969550min)/()(9550)(2)方法一)方法一A R U I f f f 212.15.181220===A I I I f N a 69.87212.19.88=-=-=07.03000114.069.87220=´-=-=F N a a N N e n R I U CmN I C I C T aN eaTem ×=´´=F =F =62.5869.8707.055.955.9方法二方法二W P P p N N 2558170009.882201=-´=-=S =--S =++cuf cu ad Fe m p p P p p p ff a a R I R I p 22--SW 73.14145.181212.1114.069.87255822=´-´-=mN n p p p n p m N T adFe m ×=++==×5.455.955.9)(00m N TT T T T Nem×=+=+=+=62.585.412.54023)%92.86%1009.88220100017%10010)(3=´´´=´´´=N N N N I U kw P h4)min /10802036.02200r C U n E e ==F =28. 解:解:1)m N r n KW P m N T N N N ×=´==×6.1883500969550min)/()(9550)( 2)AI I I fNa2505255=-=-=841.0500078.0250440=´-=-=F N a a N N e n R I U Cm N I C I C T a N e a T em ×=´´=F =F =88.2007250841.055.955.93)min/2.523841.04400r C U n N e N ==F = 4)min/3.470250841.01.0078.02.523r I C R R C U n a N e ad a N e N =´+-=F +-F =第二章第二章15.(1)W =÷÷øöççèæ´-´=÷÷øöççèæ-=571.01.201075.11.201102121232N N N N a I P I U R 068.01450571.01.20110N a N N N e =´-=-=n R I U C f 649.055.9N e N T ==f f C C min/r 1618068.0110N e N 0===f C U nm N 04.131.20649.0N N T emN ×=´==I C T f固有特性两点坐标为:固有特性两点坐标为:A 点(min /r 1618,00em ==n T ) B 点(min /r 1450,m N 04.13N em ==×=n n T ) (2)min /r 15341.205.0068.0571.01618aN e a 0=´´-=-=I C R n n f (3)aN e a0I C R n n f -=A 5.10571.0068.0)15301618()(a N e 0a =-=-=R C n n I f 16.(1)W =÷÷øöççèæ´-´=÷÷øöççèæ-=315.07.5310107.532202121232N NN N a I P I U R0677.03000315.07.53220N a N N N e =´-=-=n R I U C f 6465.055.9N e N T ==f f C Cmin/r 32500677.0220N e N 0===f C U n 197.76465.00677.0315.02N T e a =´==f b C C Rem em 0197.73250T T n n -=-=b(2)9.526465.00677.02315.02N T e ad a '=´+=+=f b C C R Rem em '09.523250T T n n -=-=b(3) min /r 16250677.01102N e NN e a '0====f f C U C U nA5.10571.0068.0)15301618()(a Ne 0a =-=-=R C n n I fem 197.71625T n -=(4)min /r 40638.00677.0220''e a 0=´==f C U n25.118.06466.00677.0315.0''22T e a =´´==f b C C Rem 25.114063T n -=17.(1)N a N aaNst 8.15A 6.3283067.0220I R U R EUI ====-=(2)A 25.3115.2075.15.1N s t =´==I IW=-=-=64.0067.025.311220a st N st R I U R 19.V 8.20612.0110220a N N aN =´-=-=R I U EA 2751105.25.2N max -=´-=-=I IW=---=--=632.012.02758.206a max aN ad R I E R20. (1) aN e a 0I C R n n f --= 172.012008.206N aN N e ===n E C f min/r 12791723.0220N e N 0===f C U nmin/r 135********.012.01279a N e a 0-=´--=--=I C R n n f (2) aNe ada 0I C R R n n f +--=()()W=--´+-=--´+=226.012.01101723.012771500aNNe 0ad R I C n n R f21. (1)294.0685296.064220N a N N N e =´-=-=n R I U C fmin /r 76719748643.0294.0296.0294.0220a Ne aN e N aN e a0-=--=´´--=--=--=I C R C U I C R n n f f f ()()W =-´-´+´-=--´+=837.0296.0643.0294.07486852.1aNN e 0R I C n n R ad f(3) 可用串电阻方法可用串电阻方法r/min5.3425.0N =n7.1793.0803.22935.0296.07485.342ad´´´+-=R W =91.5ad R22 193.010005.054220N a N N N e =´-=-=n R I U C f843.155.9N e N T =´=f f C C m N 522.99emN ×=T(1) n 不能突变,min /r 1000N ==n n AR R n C U I ad a N N e N a 5.135.15.01000193.0220=+´-=+-=f NmI C T a N T em88.24==f(2) L T 保持不变且L em T T =稳定状态时,A 54N ==I I amin /r 580522.99843.1193.0290.1139emN 2N T e ad a N e N =´´-=+-=T C C R R C U n f f(3)原%2.84542201000012N =´==P P h%36.47542205.15410000%10021212=´´-=-=´=N ad a N I U R I P P P h或:%8.481000580%2.84N N =´==n n h h23.(1)a e ae N N I C R C U nf f -=A 2.1315.01000193.08.0220a N e N a=´´-=-=R n C U I f m N 5.1932.131193.055.98.08.0a N T em ×=´´´==I C T f(2)A5.678.0548.08.0N N T N T N a =====I C T C T I f fmin /r 12065.678.0193.05.08.0193.0220a e ae N =´´-´=-=I C R C U n ff(3) 12P P =h kW06.1210003.120610N N 2=´==n n P PkW 8514W 14850567220a N 1==´==I U P %2.81%10085.1406.12%10012=´=´=P P h24. (1) aN e aN e N I C R C Un f f -=A 345.01000193.0176a N N e a -=´-=-=R n C U I f m N 67.62)34(193.055.955.9a N e em ×-=-´´==I C T f(2) 稳态时稳态时A 54N a ==I Imin/r 772193.0545.0176ae a e N =´-=-=I C R C U n ff(3) W 950454176N 1=´==UI P W7.77166077214.325.9522=´´´=W ×=T P%2.8195047.7716%10012==´=P P h第三章第三章 4.N 2N 2N 1N 1N 33750I U I U S === A34.425.10310750A37.12353107503N231N =´´==´´=I I5. (1)此时,V 110,V 220ax A X ==U U 由于加于绕组两端的电压不变,所以m m F =F ¢不变不变磁势不变磁势不变设原边匝数为N 1 0'0'1'0101322·····=+=I I I N I N I N (2),V 110,V 220ax A X ==U U m m F =F ¢不变不变磁势不变磁势不变0'0'01'010122·····=-=I I I N I N I N8.空载变比43.144.0310==kW===42.2219365400320202m k I U k ZW =÷øöçèæ=÷øöçèæ=35.182********33222002m k I P kRW =-=91.22112m 2m m R Z XW ===42.7353450shsh sh I U ZW===W ===02.12104.235375003sh '2122sh shsh R R R I P R W =-===57.321212sh2sh sh '2σ1σR Z X X X9.(1)W =W =´+=+=W =´÷øöçèæ+=+=+=1.604.60137.096.2872.000194.023********.0sh 2221sh 2221sh 2sh2shsh Z k X k X X R k R R RXZ(3) ()()()%97.1%10034506.004.68.0872.0188.23%),(8.0cos %9.2%10034506.004.68.0872.0188.23%),(8.0cos %586.0%1003450872.0188.23%,1cos A188.2334501080%100sin cos %2223N11N 2sh 2sh N1-=´´-´´=D ==´´+´´=D ==´´=D ==´=´+=D u u u I U X R I u 超前滞后时j j j j j b10.(1) ()W Ð=+=+=W+===´´=´==== 58.28735.315.636A47.1151000310200100035.2340031000'L sh L 2'L 3N1N 2N 1N j Z Z Z j Z k Z S I U U k W -Ð=ÐÐ==··58.2848.8258.2870310001N 1Z U I V3.38307.12.20633A2.206A48.82L 22L 121=´´=====Z I U kI I I (2) ()kW5.12558.28cos 48.8210003cos 31111=-´´´==j I U P878.0)58.28cos(cos1=-= j(3) ()()%100sin cos %100sin cos %N 12sh 2sh 1N 1221´+=´+=D U X R I U X R I u K K N j j j j b 894.096.048.0cos cos cos 12=÷øöçèæ==-tg L j j ()%2.4%10031000449.035.0894.015.048.82%=´´+´´=D u7143.047.11548.82==b %5.97%100105.125894.02.2063.3833%100cos 33122212=´´´´´=´==P I U P P j h11.(1) 66.840036000==k96.30746.85.45.7L 2'L Ð=+==j z k ZW =´´==064.09.538310563232shshN sh I p RA9.5386000310560033N 1N N 1sh =´´==U S I IW ===3.09.53832803shshsh I U ZW=-=293.02sh 2sh sh R z XW Ð=W +=+= 36.32955.8793.4564.7'L s h j Z Z Z36.328.38636.32955.8036000311-Ð=ÐÐ==··zU I NA 8.3861=I A 5802312==kI I V6.3901166.0325.58023L 22L =´=×=Z I U96.301166.006.01.0L Ð=+=j Z(2) shN 202N 0shN 2cos 1p p S p p b j b b h +++-=718.09.5388.386N 11===I I b858.096.30cos cos2==j%66.9810181056718.0858.010*******.010*********.013323332=´+´´+´´´´+´´-=h567.010561018,33shN 0m max =´´==p p b h 时%7.9810181056567.0858.010*******.010*********.013323332max=´+´´+´´´´+´´-=h或%7.982cos 2102N 0max=+-=p S p j b h第四章第四章24. 解:05.0100095010001N 1N =-=-=n n n sem N cu2P s p = ∴5%的电磁功率消耗在转子电阻上。
自动控制原理与应用答案解析第二版_课后答案解析
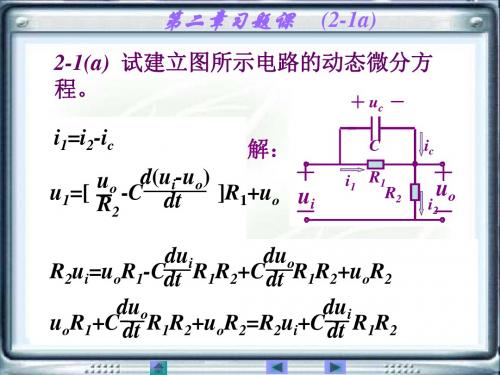
第二章习题课 (2-11d)
2-11d 求系统的闭环传递函数 。
解: (1)
R(s) G1 + G2
C(s)
_
HG2
R(s)
_
C(s) G1 + G2
L1 H
C(s) R(s)
= (G1+G2
)
1 1+G2H
(2) L1=-G2H P1=G1 Δ1 =1
P2=G2 Δ2 =1
第二章习题课 (2-11e)
C(s)=
(s2+4s+2) (s+1)(s+2)
=1+
2 s+2
-
1 s+1
c(t)=δ (t)+2e-2t+e-t
第二章习题课 (2-10)
2式R-1(,s0) 试已- R画知(sG出)系1 -系统统G1的+2的G微G3G动1分G2G-2态G6方+3G结GG程-432GG构组46G图G5的3C并拉(s求)氏G传4变C递(s换) RC((函解ss))R=数:(s1)。+CRG- ((ss3)GX)X[GGX112(7(-1GX2(ssXs())3)s6=(=1--)s(G+GR{=s)=)R81GG((GGsGs(C2))3s236(]GG)G((s-ssG)1CG)4)1[[(XX=G2GXXsC7(3-)2Gs2((1G(5--2()ss(sGs+4G[))s8))(GG-)G1s-C3-15()7-GG(Gs(X+(1ss)GsGG)6)64[3)GG(3G(-3sG2sGG55G)G7)(4X2s(G8GG3GGG)s3(X3])5s7G86(573-)s(GC]s)4})]((8GsGG(s)14)7(C]s-C)(Gs(s)8))
(完整word版)控制电机(2版)思考题与习题参考答案
控制电机(2版)思考题与习题参考答案(机械工业出版社,李光友等编着)第1章 直流伺服电动机1. 一台直流电动机,其额定电压为110V ,额定电枢电流为0.4A ,额定转速为3600r/min ,电枢电阻为50Ω,空载阻转矩015.0T 0=N ·m ,试问电动机的额定负载转矩是多少? 解:, =120,2. 一台型号为55SZ54的直流伺服电动机,其额定电压为110V ,额定电枢电流为0.46A ,额定转矩为093.0 N ·m ,额定转速为3000r/min 。
忽略电动机本身的空载阻转矩0T ,试求电机在额定运行状态时的反电动势a E 和电枢电阻a R 。
解:U=, , 1003. 伺服电动机型号为70SZ54,,V 110U U ,W 55P f N N ===效率min /r 3000n %,5.62N N ==η,空载阻转矩0714.0T 0= N ·m 。
试求额定运行时电动机的电枢电流aN I ,电磁转矩e T ,反电动势aN E 和电枢电阻a R 。
解:100 ,4. 由两台完全相同的直流电机组成的电动机-发电机组。
它们的励磁电压均为110V,电枢绕组电阻均为75Ω。
当发电机空载时,电动机电枢加110V电压,电枢电流为0.12A,机组的转速为4500r/min。
试求:(1)发电机空载时的输出电压为多少?(2)电动机仍加110V电压,发电机负载电阻为1kΩ时,机组的转速为多少?解:(1)(2)由得,, =0.12A, n=4500r/min.接负载时,U=,解得=4207r/min5. 试用分析电枢控制时的类似方法,推导出电枢绕组加恒定电压,而励磁绕组加控制电压时直流伺服电动机的机械特性和调节特性。
并说明这种控制方式有哪些缺点?答:磁场控制时电枢电压保持不变。
机械特性是指励磁电压不变时电动机转速随电磁转矩变化的关系,即= 。
由公式可知,当控制电压加载励磁绕组上,即采用磁场控制时,随着控制信号减弱,减小,k增大,机械特性变软。
运动控制系统-课后习题答案

运动控制系统 课后习题答案2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围max minD n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率01515010%N s n n =∆==2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少?? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R rpm ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =∆-=⨯⨯-=2.5 某龙门刨床工作台采用V-M 调速系统。
已知直流电动机60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V •min/r,求:(1)当电流连续时,在额定负载下的转速降落N n ∆为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ∆又为多少? 解:(1)3050.180.2274.5/min N N n I R Ce r ∆=⨯=⨯=(2)0274.5(1000274.5)21.5%N N S n n =∆=+=(3)(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*8.8uU V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。
电机与拖动(第二版)习题解答

2.1.2解:(1) E 1=4.44N 1f Фm =4.44×783×50×0.0575≈9995(V) E 2=4.44N 2f Фm =4.44×18×50×0.0575≈229.77(V) (2)设.999501E =∠ ,则.110000180.01U =∠ ...11110000180.019995000.6j2.45U E Z I ︒︒+∠+∠==+ 100009995 1.991042.5276︒︒-+≈=∠∠ I 0=1.99A(3)..222229.7704185.2515.630.0029j0.001+0.05-j0.016L E I Z Z ︒︒∠==≈∠++ I 2=4185.25Ak=N 1/N 2=783/18=43.5I 1=I 2/k=4185.25/43.5=96.21(A)2.3.1解:12 6.3k=15.750.4NP NP U U === U 1NP =U 1N'2Z =k 2Z 2=15.752(0.024+j0.04)=5.59+j9.92'L Z =k 2Z L =15.752(2.4+j1.2)=595.35+j297.68'2Z +'L Z =5.59+j9.92+595.35+j297.68=601.3+j307.6=675.41∠27.09°(Ω) ''m 2e 1''m 2()=+L LZ Z Z Z Z Z Z Z +++=6+j8+(1500+j6000)675.4127.091500+j6000+601.3+j307.6︒⨯∠ =637.61∠31.8(Ω) ..11e 3641.620=637.6131.8NP U I Z ︒︒∠=∠=5.71∠-31.8°(A)...'2111NP E E U Z ==-=(6+j8)×5.71∠-31.8°-3641.62∠0° =3588.49∠-180.33°(V) .'.'22''23588.49180.33675.4127.03L I E Z Z ︒︒∠-==∠+=5.31∠-207.42°(A) =5.31∠152.58°A'22kI I ==15.75×5.31=83.63(A)I 2NP =I 2N363101.73400⨯=⨯=91(A) 由于I 2﹤I 2NP ,所以未过载。
《电机与电气控制技术》第2版--习题解答--第一章--变压器
《电机与电气控制技术》第2版--习题解答--第一章--变压器《电机与电气控制技术》第2版习题解答第一章变压器1-1 在分析变压器时,对于变压器的正弦量电压、电流、磁通、感应电动势的正方向是如何规定的?答:在分析变压器运行时,上述正弦量的正方向规定如下:1)电源电压正方向与其电流正方向采用关联方向,即两者正方向一致;2)绕组电流正方向与所建立的磁通正方向符合右手螺旋定则;3)由交变磁通产生的感应电动势,两者的正方向符合右手螺旋定则。
1-2 变压器中的主磁通和漏磁通的性质和作用是什么?答:变压器一次绕组流过正弦交流电流,产生正弦交流磁通,该磁通绝大部分沿变压器铁心闭合且与一、二次绕组同时交链,这部分磁通为主磁通;而另有很少的一部分磁通只与一次绕组交链,且主要经非磁性材料闭合,不只二次绕组交链的磁通为一次绕组的漏磁通。
击穿或烧坏。
1-5 一台单相变压器,额定容量为S N =250KV·A ,额定电压U 1N /U 2N =10KV/0.4KV ,试求一、二次侧额定电流I 1N 、I 2N 。
答:由S N =U 1N I 1N = U 2N I 2N则I 1N =S N /U 1N =250KV·A/10KV=25AI 2N = S N / U 2N =250KV·A/0.4KV=62'5A1-6 有一台三相变压器,S N =100KV·A ,U 1N /U 2N =6KV/0.4KV ,Y yn 联结,求一、二次绕组的额定电流。
答:由SN 1122N N N N I I =,而一、二次绕组均为里接,线电流=相电流则I '1N =I 1N =1100KV A 6KV 9.63A N N S=⋅= I '2N =I 2N =2100KV A 0.4KV 144.5A N N S =⋅=1-7 有一台三相变压器,S N =500KV·A ,U 1N /U 2N =10.5KV/6.3KV ,Y d 联结,求一、二次绕组的额定电流。
《电机与运动控制系统》课后习题参考答案

《电机与运动控制系统》课后习题参考答案第一章磁路(5题)1-1.一环形铁心,平均路径长度为36cm,横截面为3cm2,上绕400的线圈。
当励磁电流为1.4A时,铁心中的磁通为1.4⨯10-3Wb。
试求:(1)磁路的磁阻;(2)此时铁心的磁导率及相对磁导率。
[400⨯103A/Wb;0.003H/m,2400]解:①.R m=F/Φ=IW/Φ= 1.4⨯400/(1.4⨯10-3)=400000=400⨯103(A/Wb);②.μ= l/(S⨯R m)=0.36/(0.0003⨯400⨯103) =0.003(H/m);③.μr =μ/μ0 =0.003/(4π⨯10-7)=2387.3241。
答:(1)磁路的磁阻为:400⨯103A/Wb;(2)此时铁心的磁导率及相对磁导率分别为:0.003H/m和2400。
(答毕#)1-2.为了说明铁磁材料的磁导率随磁化状态而变化的情况,根据硅钢片的B-H曲线(图1-2-3)试计算:当磁密分别为0.8T、1.2T和1.6T 时,其磁导率和相对磁导率各为多少?说明磁导率与饱和程度有什么关系?[3.8⨯10-3H/m;3040;1.7⨯10-3H/m,1360;0.4⨯10-3H/m,320]解:①.由硅钢片的B-H曲线(图1-2-3)查得:当磁密分别为0.8T、1.2T和1.6T时,磁场强度分别为:0.2⨯103A/m、0.7⨯103A/M和4.25⨯103A/m。
根据μ=B/H和μr =μ/μ0,其磁导率和相对磁导率各为:4⨯10-3H/m、1.7⨯10-3H/m、0.4⨯10-3H/m和3180、1364、300(近似值,计算结果:0.004、0.0017、0.000376和3183.0989、1364.1852、299.5858);②.由上述计算可知:硅钢片的磁导率随着饱和程度的增加而急剧减小[要得到0.8T的磁密,只需要磁场强度为:0.2⨯103A/m;而要得到1.6T的磁密,就需要磁场强度为:4.25⨯103A/m。
第二版1-3章习题及详解
第1章习题及详解1-1 试举出日常生活中所见到的开环控制系统和闭环控制系统各一例,并分别说明其工作原理。
答:开环控制系统与闭环控制系统的差别在于有没有将输出量反馈到输入端的反馈通道。
家庭空调的温度控制就是一个闭环控制系统,其原理是当室内温度升高或降低时,温度传感器将检测到的实际温度反馈到系统输入端与参考输入给定的期望温度比较求得偏差,温度控制器根据偏差信号产生控制作用控制压缩机制冷量,从而维持室温在期望值附近。
在要求不高的场合,有些简单的传送带系统是由电动机带动的开环控制系统。
工作原理很简单,只需闭合电源开关,则电动机带动传送带运行,传送带上负载变化会引起传送速度变化。
1-2 试说明开环控制和闭环控制的优缺点。
答:开环控制系统的控制精度主要取决于系统本身参数的稳定程度,没有抵抗外部干扰的能力,因此,在实际工作环境中,难以达到很高的控制精度。
开环控制系统的优点是结构简单,成本较低,缺点是抗扰性能差。
对于参数稳定的系统,在外部干扰较弱或控制精度要求不高的场合,开环控制系统仍被大量使用。
闭环控制系统利用反馈信号得到的偏差来产生控制作用,也称为反馈控制系统。
这种基于偏差的闭环控制系统具有较强的抵抗外部和内部扰动的能力,并使其对内部参数的变化没有开环控制系统那么敏感,换句话说,要达到较高的控制精度,闭环控制系统对其内部参数的精度要求没有开环控制系统那么高。
由于增加了反馈元件和比较元件等,闭环控制系统的结构相对复杂,成本也有所增加,特别地,当控制装置的参数配合不当时,可能会出现系统内部信号剧烈振荡,甚至发散导致系统不稳定而无法工作的情况。
闭环控制系统的稳定性问题是开环控制系统没有的独特现象。
闭环控制系统的优点:具有很强的自动纠偏能力和较高的控制精度;缺点:由于采用了反馈装置,设备增多,结构复杂,成本增加,同时存在稳定性问题。
闭环控制系统具有的自动纠偏能力和较高的控制精度是开环控制系统无法替代的,因而在控制工程实际中获得了最广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-1安培环路定律P11,磁路的欧姆定律P12,电磁感应定律P19不一定可以,因为磁路是非线性的,存在饱和现象。
2-2磁阻和磁导与磁路的磁导率、长度和截面积有关,其中磁导率取决于磁路的饱和程度,即磁通密度的大小。
2-3Φ2>Φ1 B2=B1Φ2=Φ1 B1>B22-4 (1)如果工作时进入磁饱和区,设备发热加剧,影响设备正常运行。
P15 P16(2)2-5 P242-6(1)P23(2)2-7 P242-8 (1)瞬态值(2)平均值2-9无功功率铁心损耗P372-10(1)P35 P39(2)P422-11 P39 重置前后磁动势不变P402-12 P37 大好2-13 因素:①铁芯材质,磁路结构②磁感应强度③原边和副边的绕线方式,顺序④线圈结构2-142-15 增大2-16 P422-172-18E1=-j4*44fW1ΦmE2 =-j4*44fW2Φm2-192-20 N1=W1 N2=W2(1)换向器在直流电机中起什么作用?答:在直流发电机中, 换向器起整流作用, 即把电枢绕组里的交流电整流为直流电, 在正、负电刷两端输出。
在直流电动机中,换向器起逆变作用, 即把电刷外电路中的直流电经换向器逆变为交流电输入电枢元件中。
(2)直流电机的主磁路由哪几部分组成?磁路未饱和时,励磁磁通势主要消耗在哪一部分上?答:直流电机的主磁路由以下路径构成: 主磁极N 经定、转子间的空气隙进入电枢铁心, 再从电枢铁心出来经定、转子间的空气隙进入相邻的主磁极S, 经定子铁心磁轭到达主磁极N, 构成闭合路径。
励磁磁通势主要消耗在空气隙上。
3-2直流电机的铭牌上的额定功率是指什么功率?答:对于直流发电机,是指输出的电功率;对于直流电动机,是指输出的机械功率。
3-33-4直流发电机的损耗主要有哪些? 铁损耗存在于哪一部分, 它随负载变化吗? 电枢铜损耗随负载变化吗?答:直流发电机的损耗主要有: (1 ) 励磁绕组铜损耗; ( 2 ) 机械摩擦损耗; ( 3) 铁损耗; ( 4 )电枢铜损耗; ( 5 ) 电刷损耗; ( 6 ) 附加损耗。
铁损耗是指电枢铁心在磁场中旋转时硅钢片中的磁滞和涡流损耗。
这两种损耗与磁密大小以及交变频率有关。
当电机的励磁电流和转速不变时, 铁损耗也几乎不变。
它与负载的变化几乎没有关系。
电枢铜损耗由电枢电流引起, 当负载增加时, 电枢电流同时增加, 电枢铜损耗随之增加。
电枢铜损耗与电枢电流的平方成正比。
3-5 P55页电枢电流,励磁电流3-6 P57页电动:n Te 同方向发电:n Te 反方向1.3电动2.4发电(1.2.3.4为罗马数字)为各量的实际运动方向提供参考3-7 1.略2.是3-8略3-93-10 1.先励磁再电枢2.一般的他励直流电动机为什么不能直接启动? 采用什么启动方法比较好?答:他励直流电动机启动时由于电枢感应电动势Ea =CeΦn = 0 , 最初启动电流IS =URa, 若直接启动, 由于Ra 很小, IS 会十几倍甚至几十倍于额定电流, 无法换向, 同时也会过热, 因此不能直接启动。
比较好的启动方法是降低电源电压启动, 只要满足T≥(1 .1~1 .2 ) TL 即可启动, 这时IS ≤Iamax 。
启动过程中, 随着转速不断升高逐渐提高电源电压, 始终保持Ia ≤Iamax 这个条件, 直至U = UN , 启动便结束了。
如果通过自动控制使启动过程中始终有Ia = Iama x 为最理想。
3-113-12他励直流电动机启动前, 励磁绕组断线, 启动时, 在下面两种情况下会有什么后果:(1 ) 空载启动;(2 ) 负载启动, TL = TN 。
答:他励直流电动机励磁绕组断线, 启动过程中磁通则为剩磁磁通, 比ΦN 小很多。
(1 ) 空载启动当最初启动电流IS ≤Iamax 时, 启动转矩TS 就会比空载转矩M0 大很多, 因此电动机可以启动, 但启动过程结束后的稳态转速则非常高, 因为稳定运行时要满足Ea≈UN , Ea = CeΦn , Φ很小, n就很高, 机械强度不允许, 电动机会损坏。
(2 ) 负载启动, TL = TN当Ia ≤Iama x 时, 电磁转矩比负载转矩TL 小, 电动机不启动。
这样如果采用降压启动时, 电源电压继续上升, 电枢电流继续增大, 电磁转矩T 继续增大, 从动转矩来讲会达到大于1 .1 TN , 但是由于Φ很小, 会使电枢电流远远超过Iamax , 不能换向, 同时也会由于过热而损坏电动机。
当然, 用电枢串电阻启动的结果也相同。
3-13 略3-14略3-15用电动机惯例时,他励直流电动机电磁功率PM=EaIa=TΩ<0,说明了电动机电能量转换的方向是机械功率转换成电功率,那么是否可以认为该电动机运行于回馈制动状态,或者说是一台他励直流发电机?为什么?答:(1)他励直流电动机运行时PM<0,说明T与n方向相反,因此电动机运行于制动状态。
(2)制动运行状态包括回馈制动运行、能耗制动运行、反接制动过程及倒拉反转等制动状态,而直流发电机状态仅仅是回馈制动运行这一种。
(3)因此,仅仅从PM<0说明电动机是一台发电机的看法是错误的。
(4)运行于回馈制动运行状态的条件是:① PM<0,②P1=UIa<0,也就是说,机械功率转变成电功率后还必须回送给电源。
3-163-173-18略 3-19一台他励直流电动机的P N =17kW ,U N =110V ,I N =185A ,n N =1000r/min ,已知电动机最大允许电流I max =1.8I N ,电动机拖动T L =0.8T N 负载电动运行。
试求:(1)采用能耗制动停车,电枢应串入多大电阻?(2)采用电压反接制动停车,电枢应串入多大电阻?解:(1)065.018510171851103232232=⨯-⨯=-=N N N N a I P I U R 1.01000065.0185110=⨯-=-=ΦN a N N N e n R I U Cmin /10041858.01.0065.01.0110r I C R C U n a N e a N e N =⨯⨯-=Φ-Φ=N B a N e B a a B I R R n C R R E I =+Φ=+=11 1858.1065.010011.01⨯=+⨯B RΩ=24.01B R (2)N B a N e B a a B I R R n C U R R E U I 8.122=+Φ+=++=1858.1065.010011.01102⨯=+⨯+B RΩ=56.02B R3-203-21 略4-1为什么加负载后直流电动机的转速会降低,它的实质是什么?答:当负载电流增大后,电枢电阻上压降增大,使E 减小,导致转速n 必然下降。
实质是电枢电阻的存在导致压降增大。
4-2什么叫调速范围、静差率?它们之间有什么关系?怎样才能扩大调速范围?①调速范围——电动机在额定负载下调速时,允许的最高转速max n 与最低转速min n 之比叫做调速范围,用D 表示,即minmaxn n D =②静差率——当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比,称作静差率S ,即0Nn n S ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式,使转速降落N n ∆能够大幅度下降,才能在保证静差率S 不变的前提下扩大调速范围。
4-3直流电动机为PN=74kW,UN=220V ,IN=378A ,nN=1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R Ce rpm ∆==⨯+=[(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-=(就是公式的转换!) 4-4:4-54-6(1)(2)(3)4-74-8 某调速系统的开环放大系数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大系数提高到30,它的转速降为多少?在同样静差率要求下,调速范围可以扩大多少倍?解:根据 Kn n +∆=∆1opcl ,在K = 15时,求出1288)151()1(cl op =+=∆+=∆n K n r/min 当K 2=30时,求得min r/13.430112812op cl2=+=+∆=∆K n n再根据)1(s n s n D N N -∆=,在同样静差率要求下94.113.4822==∆∆=n n D D cl cl 答:如果开环放大系数提高到30,它的转速降为4.13r/min ;在同样静差率要求下,调速范围可以扩大到1.94倍。
4-10 略4-114-124-134.144-15(2).抑制负载转矩(3).可以。
4-16区别是有无独立的加速度环和补偿的方式不同,前者是前馈补偿,后者是转速环的补偿。
因为扰动计算机的原理是加入了前馈补偿所以是前馈方法。
4-17 略4-18 略5-1同步电机与异步电机在结构上有什么不同和相同之处?与他励直流电动机的结构有何不同?同步电机和异步电机的定子绕组是相同的,主要区别在于转子的结构。
同步电机的转子上有直流励磁绕组,所以需要外加励磁电源,通过滑环引入电流;而异步电机的转子是短路的绕组,靠电磁感应产生电流。
相比之下,同步电机较复杂,造价高。
他励直流电动机是利用换向器来自动改变线圈中的电流方向,从而使线圈受力方向一致而连续旋转的。
同步与异步电机由定子和转子组成,定子就是电磁铁,转子就是线圈。
而定子和转子是采用同一电源的,所以,定子和转子中电流的方向变化总是同步的,即线圈中的电流方向变了,同时电磁铁中的电流方向也变5-2(1)鼠笼式异步电机的鼠笼式转子如何产生感应电流从而变成磁铁的?当电动机的三相定子绕组(各相差120度电角度),通入三相对称交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋转磁场作用下将产生电磁力,从而变成磁铁。
(2)鼠笼式异步电机能否工作在发电状态?该电机被原动机拖动旋转并在定子电端口接上无缘负载时电机是否可以发出电来?可以工作在发电状态。
不能发出点电,缺少励磁电流。
(3)用原动机拖动永磁同步机电动机旋转,电端口接无缘负载,此时电动机能否做发电机用?为什么?可以原动机拖动转子旋转(给电机输入机械能),极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场)。