现代信号处理第3章最优滤波
[PPT课件]现代信号处理-维纳和卡尔曼滤波
![[PPT课件]现代信号处理-维纳和卡尔曼滤波](https://img.taocdn.com/s3/m/ee37c56427d3240c8447ef41.png)
2.2 维纳滤波器的离散形式——时域解
2.2.2 维纳—霍夫方程
把k的取值代入(2.2.9)式, 得到:
当k=0时,h1rxx(0)+h2rxx(1)+…+hMrxx(M-1)=rxd(0) k=1时, h1rxx(1)+ h2rxx(0)+…+ hMrxx(M-2)= rxd(+1)
k=M-1时, h1rxx(M-1)+ h2rxx (M-2)+…+hMrxx(0)= rxd(M-1)
(2.2.10)
…
2.2 维纳滤波器的离散形式——时域解
2.2.2 维纳—霍夫方程 定义 T T h h1, h2 ,, hM , Rxd rxd (0), rxd (1),, rxd (M 1),
rxx (0) rxx (0) Rxx r ( M 1) xx
2.1 引 言
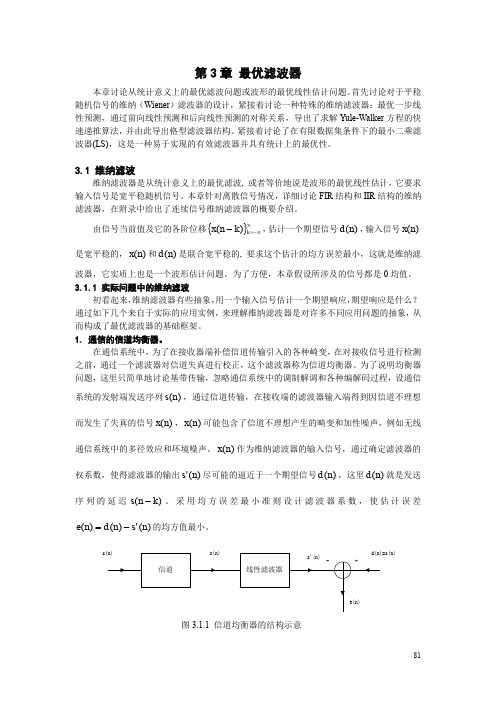
为了得到不含噪声的信号 s(n) ,也称为期望信号, 系统的期望输出用 yd(n)表示,yd(n)应等于信号的真值
若滤波系统的单位脉冲响应为 h(n) (如图 2.1.2 所示), s(n);系统的实际输出用y(n)表示,y(n)是s(n)的逼近或
估计,用公式表示为yd(n)=s(n), y(n) =
因此,维纳滤波器的传输函数H(z)的求解转化为 G(z)的求解。
x(n)
1 B( z)
(n )
G(z)
^ y(n)= s (n)
图 2.3.3 维纳滤波解题思路
2.3 离散维纳滤波器的Z域解
2.3.1 非因果维纳滤波器的求解
假设待求维纳滤波器的单位脉冲响应为 ω(n),期 望信号 d(n)=s(n) ,系统的输出信号 y(n)=s(n) , g(n) 是 G(z)的逆Z变换, 如图2.3.3所示。
现代信号分析与处理技术_第2讲_最优滤波方法
{
}
p −1 ⎧⎡ ⎤ ∗ ⎫ = E ⎨ ⎢ d (n) − ∑ w(l ) x(n − l ) ⎥ d (n) ⎬ l =0 ⎦ ⎩⎣ ⎭
即:
ξ min = rd (0) − ∑ w(l )r (l )
l =0
∗ dx
p −1
或:
H ξ min = rd (0) − rdx w
或:
H -1 ξ min = rd (0) − rdx Rx rdx
k =0
因此最优线性预测器的Wiener-Hopf方程为:
⎡ rx (0) rx∗ (1) rx∗ (2) ⎢ rx (1) rx (0) rx∗ (1) ⎢ rx (2) rx (1) rx (0) ⎢ ⎢ r ( p − 1) rx ( p − 2) rx ( p − 3) ⎣x rx ( p − 2) ⎥ ⎢ w(1) ⎥ ⎢ rx (2) ⎥ ∗ rx ( p − 3) ⎥ ⎢ w(2) ⎥ = ⎢ rx (3) ⎥ ⎥⎢ ⎥ ⎥ ⎢ ⎥ ⎢ w( p − 1) ⎥ ⎢ r ( p ) ⎥ rx (0) ⎦ ⎣ ⎦ ⎣x ⎦
信息科学与工程学院 杨绿溪
• 维纳滤波
FIR维纳滤波 应用:滤波、线性预测、噪声抑制、反卷积MMSE均衡器 IIR维纳滤波
• 线性离散卡尔曼滤波器
- - -高斯假设下的序贯贝叶斯滤波 • 非线性最优滤波-序贯MC贝叶斯滤波
• 基本的粒子滤波器应用实例
参考书和参考文献
• 杨绿溪,现代数字信号处理,科学出版社,2007年11月。 • 张贤达,现代信号处理,清华大学出版社,2002年10月。 • T.Kailath, A innovations approach to LS estimation, IEEE T-AC, Vo.13, 1968, pp.641-655. • M.S.Arulampalam, S.Maskell, N.Gordon, T.Clapp, A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking, IEEE Transactions on Signal Processing, Vol.50, No.2, pp.174-188, 2002. 专辑 • Z.Chen. Bayesian filtering: From Kalman filters to particle filters, and beyond. Adaptive system lab., Macmaster Univ., Canada. [online]. http://soma.crl.mamaster.ca/zhechen /download. 另有2004-03, P-IEEE专辑
现代信号处理教程 - 胡广书(清华)

69第3章 Wigner 分布3.1 Wigner 分布的定义我们在第一章讨论了对非平稳信号作时-频联合分析的必要性,在第二章介绍了具有线性形式的时-频分布,如STFT 及Gabor 变换。
这一类形式的时-频分布还有小波变换,我们将在第九章以后详细讨论。
本章及下一章集中讨论具有双线性形式的时-频分布,主要是Wigner 分布及具有更一般形式的Cohen 类分布。
所谓双线性形式,是指所研究的信号在时-频分布的数学表达式中以相乘的形式出现两次。
在有的文献中又称为非线性时-频分布。
令信号()t x ,()t y 的傅立叶变换分别是()Ωj X ,()Ωj Y ,那么,()t x ,()t y 的联合Wigner分布定义为:()()(),,22j x y W t x t y t e d ττττ∞-Ω-∞Ω=+-⎰* (3.1.1)信号()t x 的自Wigner 定义为 ()()(),22j x W t x t x t e d ττττ∞-Ω-∞Ω=+-⎰* (3.1.2)Wigner 于1932年首先提出了Wigner 分布的概念[120],并把它用于量子力学领域。
在之后的一段时间内并没有引起人们的重视。
直到1948年,首先由Ville 把它应用于信号分析。
因此,Wigner 分布又称Wigner -Ville 分布,简称为WVD 。
1973年,DE .Bruijn 对WVD分布作了评述,并给出了把WVD 用于信号变换的新的数学基础[32]。
1966年,Cohen 给出了各种时-频分布的统一表示形式[46],1980年,Classen 在Philips .J .Res .上连续发表了三篇关于WVD 的文章[38,39,40],对WVD 的定义、性质等作了全面的讨论。
由于这些工作,使得80年代后对WVD 的研究骤然引起了人们的兴趣,发表的论文很多,也取得了一些可喜的成果。
由下面的讨论可知,在已提出的各种时-频分布中,WVD 具有最简单的形式,并具有很好的性质。
第3章 现代信号处理技术2012

x(t ) A cos(0t )
为(0, 2 ) 上均 的各态历经性。其中A和 0 为常数, 匀分布的随机变量。
三、Wigner-Ville 分布(WVD)
3.2 平稳随机信号处理方法
3.2.1 相关函数
* 自相关函数的性质 • 偶函数 • 极大值
Rx ( ) Rx ( ) Rx (0) | Rx ( ) | Rx ( T ) Rx ( )
3.1.2 随机过程的各态历经性
* 各态历经性关心的是:从随机信号的一次观测记 录是否可以估计其统计值(如相关函数、功率谱 等)。 * 辛欣证明得到:在具备一定的补充条件下,对平 稳过程的一个样本函数取时间均值,当观测的时 间充分长,将从概率意义上趋近于它的统计均值。 这样的平稳随机过程就是各态历经过程。 * 各态历经过程是其各种时间平均在观测时间充分 长的条件下以概率1收敛于它的统计平均。
,若 x(t ) E x(t ) x 以概率1成立,则称随机过程的均值具有各态 历经性。随机过程的时间均值定义为
二阶平稳过程
x(t )
1 x(t ) lim T 2T
若
T
T
x(t )dt
x(t ) x(t ) E x(t ) x(t ) Rx ( )
2 2 1 2 1 2 2
2
)
假定A和B是独立随机变量,求自相关函数 Rxx ( ) 和互协 方差函数 C xy ( )
相关函数的应用
信号检测 检测淹没在强背景噪声中的微弱的周期信 号或其他确定性信号。
时延估计 利用所接收到的目标信号,估计和测定出 接收器之间由于信号传播距离不同而引起的 时间延迟。
现代信号处理03a

第三章参量估计信号估计(Estimations)在受噪声干扰的观测中信号参量和波形的确定问题数学基础:统计估计理论、滤波理论估计理论-研究的对象是随机现象。
-根据受到噪声污染的观测数据来估计随机变量和随机过程的一种数学运算。
参量估计-被估计的量是随机变量(静态估计)波形估计-被估计的量是随机过程(动态估计)参量空间-源的输出为参量,视为参量空间的一点概率映射-从参量空间到观测空间的概率映射,既是控制θ对观测值影响的概率。
观测空间-一般观测空间是有限维的。
估计规则-是观测空间到估计量的映射。
若接收机判决某一假设为真,但与信号有关的某个参量是未知的。
参量估计的目的:在有限个信号观测样值中,以最佳方式估计该参量。
设z 1,z 2,...,z N 为随机变量z 的独立同分布的N 个观测样值,而f(z 1,z 2,...,z N )是用来估计参量θ的观测样值函数(统计量),称:∧θ=f(z 1,z 2,...,z N ) (3-1)为参量θ的估计量。
用∧θ表示对参量θ的估值。
∧θ的均值即为E[∧θ]=E[f(z 1,z 2,...,z N )]。
最佳估计-最优估计准则;随机参量-其特性用概率密度来表征-贝叶斯估计 非随机参量-仅为一般的未知量-最大似然估计 §3-1、非随机参量的最大似然估计(Maximum Likelihood Estimation--MLE)设z 1,z 2,...,z N 为随机变量z 的独立同分布的N 个观测样值,p(z|θ)为z 的依赖参量θ分布密度函数, 参量θ为待估计的量。
则似然函数为:())23)..(()()z ,..,z ,z (1N 21-===∏=θθθθNi i z p z p p L 选取使似然函数L (θ)为最大的∧θ作为θ的估计量,称为θ的最大似然估计。
L (θ)最大等效Ln L (θ)最大。
要求θ的最大似然估计∧θ,必需解似然方程:)33....(0)(-=∂∂θθz Lnp 此式为必要条件,而不是充分条件。
P_第3章-最优滤波.
T
(3.1.1)
最小。 当滤波器系数有无穷多个 (即单位抽样响应无限长) 时, 对应 IIR 结构的维纳滤波器, 当滤波器系数为有限个时,对应 FIR 结构的维纳滤波器。FIR 结构的维纳滤波器的滤波部 分的示意图如图 3.4 所示,在信号处理的文献中,也常称这个结构为横向滤波器。
x(n)
x(n-1)
1)
从维纳滤波器是线性贝叶斯波形估计的观点,需注意如下几点: 在均方误差意义上,维纳滤波器是线性 FIR 滤波器中的最优滤波器,但可能存在一些 非线性滤波器能达到更好结果。 在 x(n) 和 d (n) 是联合高斯分布条件下,维纳滤波也是总体最优的,不存在非线性滤波 器能达到更好的结果。 从线性贝叶斯估计推导过程知,在滤波器系数取非最优的任意权系数 w 时,其误差性 能表达式为
2 T J ( w) d w T rxd rxd w w T Rw
2)
3)
(3.1.13)
84
它是 w 的超二次曲面,只有一个最小点,当 w w o 时, J ( w) J min 。
3.1.2 维纳滤波:正交原理
维纳滤波器是一个最优线性滤波器,图 3.1.3 是一个一般表示框图,滤波器核是 IIR 或 FIR 的,在实信号情况下,已经导出了求解 FIR 型维纳滤波器的方程。在第 2 章讨论了线 性最优估计的正交性原理, 第 2 章正交原理是由最优线性估计方程导出的。 在最优线性滤波 器理论中,正交原理是一个基本分析工具,由正交原理出发,很容易导出线性最优估计和维 纳 滤波器的方程式。由于正交原理应用的广泛性和简洁性,并且贯穿于平稳、非平稳和有 限数据等多种情况,在本节,对复信号的一般情况,重新导出正交原理的一般形式,并利用 正交原理, 重新推导复信号情况下维纳滤波器的一般方程。 先推导适应于 IIR 和 FIR 的一般 结论,然后分别讨论 FIR 和 IIR。 将一般的复数形式维纳滤波器的问题重新描述如下。 设输入随机过程 x(n) 为复信号,由 x(n k )k 估计期望响应 d (n) ,求复数权系数
现代信号处理_03
19
边带消除器( 边带消除器(SBC)
根据多相分解理论, • 根据多相分解理论,有
H L ( z ) = H1 ( z 2 ) + z −1 H 2 ( z 2 ) (14)
当原型低通为镜像滤波器时, • 当原型低通为镜像滤波器时,上式中
ai + z −2 H1 ( z 2 ) = ∏ 1 + ai z − 2 i =1
ai = 2 − αi , ci = 0 2 + αi 2 − βi bi = , di = 0 2 + βi b=0 (12)
N1
则式(10) 则式(10)可简化为
ai + z −2 H1 ( z ) = ∏ 1 + ai z − 2 i =1 bi + z − 2 H 2 ( z) = z ∏ 1 + bi z − 2 i =1
8
奇阶互补滤波器设计
低通互补对:令 • 高、低通互补对
2 M ( s ) = ∏ (1 + s Ω′ ) , N ( s ) = ∏ ( s 2 + Ω′ ) i i 2 2 2 2 i =1 i =1 M M
则有
M 2 (s 2 ) H L ( s) H L (− s) = 2 2 M (s ) − s 2 N 2 (s 2 )
− s 2 N 2 (s 2 ) H H ( s ) H H (− s ) = 2 2 M (s ) − s 2 N 2 (s 2 )
(3a )
(3b)
• 零点分离和分配原则
2 2 所有左 设 M ( s ) ± sN ( s ) 所有左半平面零点分别构成
G2 ( s ) G1 ( s ) G1 (−s) G2 (−s)
现代信号处理讲义讲义

子空间:向量组 a1, ,ap 的线性组合的集合,称为 a1, ,ap 张成的空间。
p
span a1, ,a p close a1, ,a p ja j , j C
j1
信号子空间: span s1, ,sp span u1, ,up 噪声子空间: span g1, ,g p span up1, ,um
J (w) 0
w*
wopt Rxx1a(k )
又
wH opt
a(k
)
1
aH
(k
)wopt
,代入上式
aH
(k
1
)R xx1a( k
)
wopt
Rxx1a(k ) aH (k )Rxx1a(k )
最佳滤波器
由Capon提出,称为最小方差无畸变(MVDR)波束形成器
MVDR: minimum variance distortionless response
期望信号 干扰信号 加性噪声
E z(n) 2 lim 1 N z(n) 2 wH E x(n)xH (n) w
N N
n1
E sk (n) 2 wH a(k ) 2 p E si (n) 2 wH a(i ) 2 2 w 2 i 1,i k
wH a(k ) 1
(波束形成条件)
现代信号处理讲义
3.5 MUSIC方法
1. 阵列信号处理问题 2. 最优波束形成器 3. 子空间方法 4. MUSIC方法 5. 改进的MUSIC方法
3.5 MUSIC方法
MUSIC: Multiple Signal Classification 1. 阵列信号处理问题 (array signal processing)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x(n 1) 0,
0,
1
v(n)
0
x(n)
a
p
,
ap1
a1
x(n 1)
1
x(n 1) Ax(n) v1(n)
2020/10/7
信号处理
13
2020/10/7
信号处理
14
Kalman滤波器推导
2020/10/7
信号处理
15
2.几个常用不相关公
2020/10/7
最优滤波的评述 Wiener滤波、Kalman滤波的最优性限制 高斯、非高斯问题 序列蒙特卡罗方法,粒子滤波等
2020/10/7
信号处理
37
1 0
Q2(n) 1
nk
nk
2020/10/7
信号处理
36
由这个模型出发,得到一组简化的Kalman方程,它在数学上 与自适应滤波器的RLS算法一一对应, 由此,建立了Kalman 滤波与RLS之间的联系,任河一种Kalman滤波的有效算法都可 以对应得到一种RLS的实现,由此借助Kalman滤波领域的研究 成果,得到一组快速自适应滤波算法. (Sayed , Kailath, 1994)
v1(n) x(n+1) Z-1I
x(n)
C(n)
2020/10/7
F(n+1,n)
信号处理
y(n)
v2(n)
7
2020/10/7
信号处理
8
2020/10/7
信号处理
9
2020/10/7
信号处理
10
y(n)
状态方程
卡尔曼滤波
xˆ (i | Yn )
2020/10/7
信号处理
11
例:一个AR(p)过程
Kalman滤波
2020/10/7
信号处理
1
标量随机过程的递推MMSE估计
2020/10/7
信号处理
2
新息序列的特性:
2020/10/7
信号处理
3
2020/10/7
信号处理
4
2020/10/7
信号处理
5
2020/10/7
信号处理
6
矢量Kalman滤波
目标:离散时间线性动力系统状态估计 模型:Kalman滤波的模型如图所示
2020/10/7
信号处理
33
2020/10/7
信号处理
34
2020/10/7
信号处理
35
4.特殊结构(无激励动力系统)
x(n 1) 1/ 2 x(n)
F(n 1, n) 1/ 2I
y(n) uH (n)x(n) v(n)
Q1(n) 0 C(n) uH (n)
E v(n)v(k)
p
x(n) ak x(n k) v(n)
k 1
令
x(n p)
x(n
1)
x(n
p
1)
x(n 1)
2020/10/7
信号处理
12
得到状态方程
x(n p 1) 0,
1, 0 0 x(n p) 0
x(n p 2) 0, 0, 1, 0, 0 x(n p 1) 0
信号处理
16
2020/100/7
信号处理
18
2020/10/7
信号处理
19
2020/10/7
信号处理
20
2020/10/7
信号处理
21
2020/10/7
信号处理
22
5.Kalman增益
2020/10/7
信号处理
23
2020/10/7
信号处理
24
6.Riccati方程(K(n,n-1)的递推公式)
2020/10/7
信号处理
25
2020/10/7
信号处理
26
2020/10/7
信号处理
27
2020/10/7
信号处理
28
2020/10/7
信号处理
29
2020/10/7
信号处理
30
Kalman预测的跟踪性能
2020/10/7
信号处理
31
增益的变化曲线
2020/10/7
信号处理
32
Kalman滤波器的一些推广简述