第二讲 国内外地质雷达技术发展状况
第二讲国内外地质雷达技术发展状况
第二讲国内外地质雷达技术发展状况第二讲国内外地质雷达技术发展状况(历史与现状)探地雷达的历史最早可追溯到20世纪初,1904年,德国人Hulsmeyer首次将电磁波信号应用与地下金属体的探测。
1910年Leimback和Lowy以专利形式在1910年的专利,他们用埋设在一组钻孔里的偶极子天线探测地下相对高的导电性质的区域,并正式提出了探地雷达的概念。
1926年Hulsenbeck第一个提出应用脉冲技术确定地下结构的思路,指出只要介电常数发生变化就会在交界面会产生电磁波反射,而且该方法易于实现,优于地震方法[1,2]。
但由于地下介质具有比空气强得多的电磁衰减特性,加之地下介质情况的多样性,电磁波在地下的传播比空气中复杂的多,使得探地雷达技术和应用受到了很多的限制,初期的探测仅限于对波吸收很弱的冰层厚度(1951,B.O.Steenson,1963,S.Evans)和岩石和煤矿的调查(J.C.Cook)等。
随着电子技术的发展,直到70探地雷达技术才重新得到人们的重视,同时美国阿波罗月球表面探测实验的需要,更加速了对探地雷达技术的发展,其发展过程大体可分为三个阶段:第一阶段,称为试验阶段,从20世纪70年代初期到70年代中期,在此期间美国,日本、加拿大等国都在大力研究,英国、德国也相继发表了论文和研究报告,首家生产和销售商用GPR的公司问世,即Rex Morey和Art Drake成立的美国地球物理测量系统公司(GSSI),日本电器设备大学也研制出小功率的基带脉冲雷达系统。
此期间探地雷达的进展主要表现在,人们对地表附近偶极天线的辐射场以及电磁波与各种地质材料相互作用的关系有了深刻的认识,但这些设备的探测精度、地下杂乱回波中目标体的识别、分别率等方面依然存在许多问题。
第二阶段,也称为实用化阶段,从20世纪70年代中后其到80年代,在次期间技术不段发展,美国、日本、加拿大等国相继推出定型的探地雷达系统,在国际市场,主要有美国的地球物理探测设备公司(GSSI)的SIR系统,日本应用地质株式社会(OYO)的YL-R2地质雷达,英国的煤气公司的GP管道公司雷达,在70年代末,加拿大A-Cube公司的Annan和Davis等人于1998年创建了探头及软件公司(SSI),针对SIR系统的局限性以及野外实际探测的具体要求,在系统结构和探测方式上做了重大的改进,大胆采用了微型计算机控制、数字信号处理以及光缆传输高新技术,发展成了EKKO Ground Penetrating Radar 系列产品,简称EKKO GPR系列。
雷达技术发展历程及未来发展趋势
雷达技术发展历程及未来发展趋势1. 引言雷达是一种利用电磁波进行目标探测和跟踪的技术,广泛应用于军事、航空、航天、气象等领域。
本文将回顾雷达技术的发展历程,并探讨未来雷达技术的发展趋势。
2. 雷达技术的发展历程2.1 早期雷达技术早期雷达技术主要集中在二战期间的军事领域。
最早的雷达系统利用射频脉冲信号来探测目标,通过测量信号的回波时间来确定目标的距离。
这种技术在战争中发挥了重要作用,但受限于当时的电子器件和计算能力,雷达系统的性能和精度有限。
2.2 进一步发展与应用随着电子技术的发展,雷达系统逐渐实现了自动化和数字化。
在20世纪60年代,雷达系统开始采用脉冲多普勒技术,可以测量目标的速度和方向。
此外,雷达系统的工作频率也逐渐增加,从射频波段扩展到毫米波和光波段,提高了雷达系统的分辨率和探测能力。
2.3 现代雷达技术现代雷达技术已经实现了高度集成和高性能化。
雷达系统采用了先进的数字信号处理和波束形成技术,可以实现多目标跟踪和抗干扰能力。
此外,雷达系统还引入了主动相控阵技术,可以实现快速扫描和高分辨率成像。
现代雷达系统广泛应用于军事侦察、空中交通管制、气象观测等领域。
3. 未来雷达技术的发展趋势3.1 高频率和宽带技术未来雷达技术将继续推动工作频率的提高,尤其是在毫米波和光波段。
高频率的雷达系统可以提供更高的分辨率和探测能力,适用于复杂环境下的目标探测和跟踪。
此外,宽带技术的应用可以实现更高的信号带宽,提高雷达系统的测量精度和抗干扰能力。
3.2 主动相控阵技术的发展主动相控阵技术是未来雷达系统的重要发展方向。
相比传统的机械扫描雷达,主动相控阵技术可以实现快速扫描和高分辨率成像,适用于多目标跟踪和复杂环境下的目标探测。
未来的主动相控阵雷达系统还可以实现更高的灵活性和可重构性,适应不同任务需求。
3.3 多传感器融合技术未来雷达系统将更多地与其他传感器进行融合,如红外、光学和声学传感器。
多传感器融合技术可以提供更全面的目标信息,提高目标识别和跟踪的准确性。
战鹰之“眼”——各国雷达的发展现状
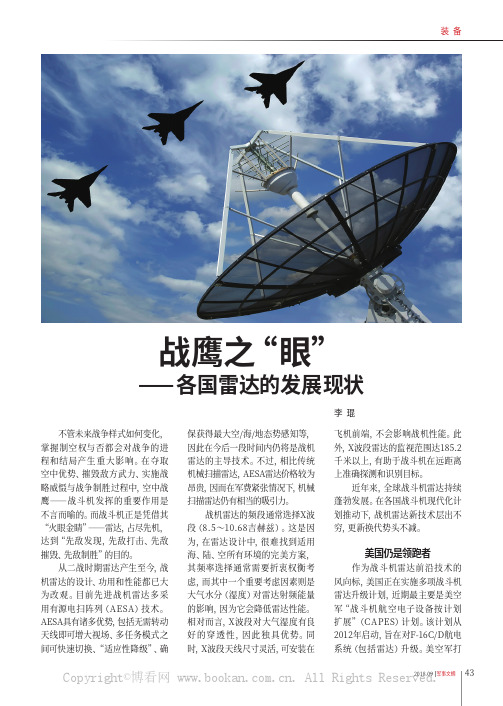
2018.09军事文摘战鹰之“眼”—各国雷达的发展现状李 琨不管未来战争样式如何变化,掌握制空权与否都会对战争的进程和结局产生重大影响。
在夺取空中优势、摧毁敌方武力、实施战略威慑与战争制胜过程中,空中战鹰——战斗机发挥的重要作用是不言而喻的。
而战斗机正是凭借其“火眼金睛”——雷达,占尽先机,达到“先敌发现,先敌打击、先敌摧毁、先敌制胜”的目的。
从二战时期雷达产生至今,战机雷达的设计、功用和性能都已大为改观。
目前先进战机雷达多采用有源电扫阵列(AESA)技术。
AESA具有诸多优势,包括无需转动天线即可增大视场、多任务模式之间可快速切换、“适应性降级”、确保获得最大空/海/地态势感知等,因此在今后一段时间内仍将是战机雷达的主导技术。
不过,相比传统机械扫描雷达,AESA雷达价格较为昂贵,因而在军费紧张情况下,机械扫描雷达仍有相当的吸引力。
战机雷达的频段通常选择X波段(8.5~10.68吉赫兹)。
这是因为,在雷达设计中,很难找到适用海、陆、空所有环境的完美方案,其频率选择通常需要折衷权衡考虑,而其中一个重要考虑因素则是大气水分(湿度)对雷达射频能量的影响,因为它会降低雷达性能。
相对而言,X波段对大气湿度有良好的穿透性,因此独具优势。
同时,X波段天线尺寸灵活,可安装在飞机前端,不会影响战机性能。
此外,X波段雷达的监视范围达185.2千米以上,有助于战斗机在远距离上准确探测和识别目标。
近年来,全球战斗机雷达持续蓬勃发展。
在各国战斗机现代化计划推动下,战机雷达新技术层出不穷,更新换代势头不减。
美国仍是领跑者作为战斗机雷达前沿技术的风向标,美国正在实施多项战斗机雷达升级计划,近期最主要是美空军“战斗机航空电子设备按计划扩展”(CAPES)计划。
该计划从2012年启动,旨在对F-16C/D航电系统(包括雷达)升级。
美空军打Copyright©博看网 . All Rights Reserved.扫阵雷达。
雷达技术发展历程及未来发展趋势

雷达技术发展历程及未来发展趋势一、引言雷达技术是一种利用电磁波进行目标探测和跟踪的技术。
它在军事、航空、航天、气象、海洋等领域发挥着重要作用。
本文将介绍雷达技术的发展历程,并展望未来发展趋势。
二、雷达技术的发展历程1. 早期雷达技术早在20世纪初,人们就开始探索无线电波的应用。
在第一次世界大战期间,雷达技术开始发展起来,用于探测敌方飞机。
当时的雷达系统主要基于连续波和脉冲波技术,但受限于技术水平,探测距离和精度较低。
2. 二战时期的雷达技术突破第二次世界大战期间,雷达技术得到了重要突破。
通过引入脉冲压缩、频率多普勒效应等技术,雷达系统的探测距离和精度大幅提升。
同时,雷达技术在军事领域的应用也得到了广泛推广,成为战争中的重要武器。
3. 后二战时期的雷达技术发展二战后,雷达技术进一步发展。
微波雷达的浮现使得雷达系统的工作频率更高,探测精度更高。
同时,雷达信号处理技术也得到了改进,使得雷达系统对目标的识别和跟踪能力得到了提升。
此外,雷达系统的体积和功耗也得到了缩小,使得雷达技术可以应用于更多领域。
4. 现代雷达技术的发展现代雷达技术在波形设计、信号处理、天线技术、目标识别等方面取得了许多重要发展。
例如,通过采用多普勒处理技术,雷达系统可以对目标的速度进行测量和跟踪。
此外,通过引入自适应波形设计和多通道信号处理技术,雷达系统的抗干扰能力得到了提升。
同时,雷达系统的天线技术也在不断改进,如相控阵天线技术、多波束技术等,使得雷达系统的探测范围和角度分辨率得到了提升。
三、雷达技术的未来发展趋势1. 高频段雷达技术的发展随着微波雷达技术的发展,人们开始研究和应用毫米波和太赫兹波段的雷达技术。
这些高频段的雷达系统具有更高的分辨率和抗干扰能力,可以应用于更复杂的环境和目标探测。
未来,高频段雷达技术将得到更广泛的应用。
2. 多波束雷达技术的发展多波束雷达技术可以同时对多个目标进行探测和跟踪,具有更高的效率和灵便性。
未来,多波束雷达技术将得到进一步发展,使得雷达系统能够实现更高的目标数量和密度探测。
雷达技术发展历程及未来发展趋势

雷达技术发展历程及未来发展趋势一、发展历程雷达(Radar)是一种利用电磁波进行探测和测量的技术。
它最早起源于20世纪初的无线电通信领域,随着科学技术的不断进步,逐渐发展成为一种重要的军事和民用应用技术。
1. 早期发展:雷达的概念最早由英国科学家罗伯特·沃森-瓦特(Robert Watson-Watt)于20世纪20年代初提出。
他的研究目标是利用无线电波来探测飞机,以应对潜在的空袭威胁。
在第二次世界大战期间,雷达技术得到了快速发展和广泛应用,成为军事领域的重要装备。
2. 技术突破:随着电子技术的进步,雷达技术也得到了快速发展。
20世纪50年代,脉冲雷达和连续波雷达成为主流技术,应用于航空、航海、气象等领域。
20世纪60年代,相控阵雷达和多普勒雷达的出现进一步提高了雷达的性能和应用范围。
3. 进一步应用:20世纪70年代以后,雷达技术开始在民用领域得到广泛应用。
例如,气象雷达可以用于天气预报和气象研究;交通雷达可以用于车辆探测和交通管理;地质雷达可以用于地下勘探和资源探测等。
雷达技术的应用领域不断扩展,为人类社会的发展做出了重要贡献。
二、未来发展趋势随着科学技术的不断进步和社会需求的不断增长,雷达技术将继续发展并迎来新的机遇和挑战。
1. 高精度和高分辨率:未来雷达技术的发展趋势之一是提高测量精度和分辨率。
随着微波和毫米波技术的突破,雷达系统可以实现对目标的更精确探测和跟踪,为军事、航空、航天和地质勘探等领域提供更可靠的数据支持。
2. 多功能集成:未来雷达系统将趋向于多功能集成。
传统的雷达系统主要用于目标探测和跟踪,而未来的雷达系统将具备更多的功能,如通信、导航、遥感等。
这将使得雷达系统在军事和民用领域的应用更加广泛,同时也提高了雷达系统的综合效能。
3. 主动探测和隐身技术:未来雷达技术将更加注重主动探测和隐身技术的发展。
主动探测技术可以通过主动发射信号主动探测目标,提高雷达系统的探测能力。
雷达技术发展历程及未来发展趋势
雷达技术发展历程及未来发展趋势1. 引言雷达技术作为一种广泛应用于军事和民用领域的无线电技术,已经经历了几十年的发展历程。
本文将介绍雷达技术的发展历程,并探讨未来雷达技术的发展趋势。
2. 雷达技术的发展历程2.1 初期发展雷达技术最早起源于二战期间,用于探测敌军飞机。
早期雷达系统采用脉冲信号来探测目标,并通过测量回波的时间来确定目标的距离。
这种技术在战争中起到了重要作用,但受限于当时的电子技术水平,雷达系统的性能和精度有限。
2.2 雷达系统的改进随着电子技术的发展,雷达系统逐渐实现了多种功能的改进。
首先,引入了连续波雷达技术,使得雷达可以实时跟踪目标的位置。
随后,引入了脉冲多普勒雷达技术,使得雷达可以检测目标的速度。
此外,还有相控阵雷达技术的引入,使得雷达可以实现更高的分辨率和目标识别能力。
2.3 雷达技术的应用拓展雷达技术的应用范围也逐渐扩大。
除了军事领域,雷达技术在天气预报、航空导航、交通监控等领域也得到了广泛应用。
雷达系统的性能和精度不断提高,使得雷达在各个领域的应用效果更加突出。
3. 未来发展趋势3.1 高频率雷达技术的发展随着微波和毫米波技术的发展,高频率雷达技术将成为未来的发展趋势。
高频率雷达可以提供更高的分辨率和目标识别能力,对于复杂环境下的目标探测和跟踪具有重要意义。
3.2 多波束雷达技术的应用多波束雷达技术可以同时探测多个目标,提高雷达系统的工作效率。
未来的雷达系统将采用多波束技术,可以实现更广泛的目标监测和跟踪。
3.3 雷达与人工智能的结合人工智能技术的快速发展为雷达技术的应用带来了新的机遇。
通过将人工智能算法应用于雷达数据处理和目标识别中,可以提高雷达系统的自动化程度和目标识别能力。
3.4 小型化和集成化未来雷达系统的发展趋势是小型化和集成化。
随着微电子技术的进步,雷达系统可以实现更小尺寸和更高性能的设计,使得雷达应用更加便携和灵便。
4. 结论雷达技术作为一种重要的无线电技术,在多个领域都有广泛的应用。
探地雷达现状及未来发展预测

探地雷达现状及未来发展预测孔祥春前言自二十世纪七十年代开始,探地雷达进入工程物探领域.雷达的早期应用主要集中在勘探方面.随着雷达技术的不断完善和发展,雷达技术陆续进入更多的领域,其应用范围不断扩大,作用日趋明显.特别是进入二十一世纪以来,雷达技术更是得到空前的发展,其重要性日益彰显.在我国,近几年隧道和路面检测,桥梁结构和建筑物结构的工程呈现几何增长趋势,雷达在检测方面的应用已经超过勘探方面的应用.1、探地雷达现状从八十年代末开始,探地雷达开始进入我国,目前在中国影响比较大的国外产品主要有瑞典MALA公司,美国GSSI公司,加拿大SSI公司等.另外,国内也有多家大学和研究机构也在研制和生产探地雷达,如北京爱迪尔国际探测技术有限公司,青岛电磁传播研究所(二十二所)等.探地雷达经过近三十年的不断发展,其硬件和软件技术日趋成熟.总的趋势是控制系统采用的处理器越来越先进,接收的频带范围越来越宽;天线频率系列化,通过选择不同频率的天线,能满足深层地下勘探和高频浅层高分辨率检测的需要.我们以瑞典MALA公司的雷达产品的发展为例,来剖析雷达的发展和目前达到的水平状况.瑞典MALA公司产品发展过程如下:1982年–孔中雷达面世1992 –开始研究地面雷达1994 - RAMAC/GPR 推向国际市场,推出非屏蔽天线10,25,50,100,200,400兆天线1996 - 1 GHz 天线推出1997 –全新的屏蔽天线概念, 500MHz 天线1998 –推出250 和800 MHz 屏蔽天线1999 –屏蔽100MHz, 多道雷达系统MC4, 用于孔中数据采集和解释的Windows下的软件2000 –新的控制单元CUII, 多道模块MC16, Easy3D 软件...2001 –新控制单元–RAMAC X3M2002 –新控制单元–RAMAC X3M Corder2002 –推出管线探测雷达Easy Locator2003 –新监视器–RAMAC/GPR Monitor ,超强地面耦合天线RTA502004 – 1.6GHz屏蔽天线2005 – 1.2GHz屏蔽天线,RadExplorer 数据处理和解释软件,监视器内置处理软件CX10和CX11混凝土无损成像系统(雷达)图一CUII主机MC16多道模块不仅主机高度集成化,各天线的设计理念也是要尽量轻便(如采用光纤来传输数据),基本可以达到单人操作的目的,为野外工作提供方便.另外,为了进行多道同时采集或进行三维数据采集,只需要在主机上增加一块多道模块(MC4或MC16),就可以进行4道或16道同时采集.值得注意的是,以前所谓的三维雷达数据,实际上是2.5维,它仅仅是采集很多剖面,并将其放在一起.而用多道模块采集的数据,可以真正实现三维数据采集(如MC16模块,它是采用四个发射天线和四个接收天线,每一个发射天线发射的信号,都可以同时被四个接收天线接收,这就构成了三维雷达数据),见下图:图二传统多道数据图三RAMAC/GPR三维数据采集2、系列化,能满足不同的需要目前,MALA公司的天线已经系列化,其天线频率(主频)范围有:屏蔽天线:100,250,500,800,1200,1600MHz非屏蔽天线:25,50,100,200MHz, RTA50(超强地面耦合天线)孔中天线:100,250MHzMALA公司在2005年底,还将推出2.0GHz屏蔽天线和RTA20低频天线.从瑞典雷达的发展过程,我们可以看出以下有趣的现象:在低频方面,MALA公司不再生产10兆的低频天线,新增加了RTA50兆天线.用过低频天线的人都知道,低频天线在野外使用很不方便.如10兆天线,它接起来的长度有8米(天线长度完全决定了天线频率,因此不可能将尺寸减小),收发天线的间距也要8米.在实际工程中,特别是在山区,有树木或灌木的地方,我们很难找到8×8米的区域来摆放10兆的天线,更不用提选择一条剖面了.为了解决这一问题,并考虑到传统低频天线很难和地面耦合这一现象,瑞典MALA公司于2004年推出了RTA50天线,该天线是软性天线,它像绳子一样,在崎岖不平的地面,它依然可以和地面耦合得很好.而且在野外使用时,只要人能爬过的地方,该天线就能通过,极大地方便了野外使用.见下图:图四用RTA50天线做边坡调查在高频方面,MALA公司于近期推出了1.2G和1.6G的天线,并计划在今年年底推出2.0G的天线.同时在2003年推出了监视器(Monitor).之所以近期推出超高频率的天线,是由于雷达检测的市场越来越大,很多检测项目所要求的精度很高,而对探测深度的要求并不高.这一市场并不限于大家很熟悉的隧道质量检测,路面检测等.很多时候需要了解混凝土浅层的结构特征.同时,有很多做结构检测的用户,对物探技术和方法并不熟悉.因此,他们强烈要求雷达采集尽量简单化,数据处理程序化.MALA公司推出监视器,并不仅仅是为了用它取代笔记本来应付野外恶劣的环境,更主要的是将软件内置在监视器中,同时监视器只需用一个按压旋转钮就可以完成全部操作,非常方便实用.图五监视器和供电锂电池3、项雷达越来越多,专项雷达的使用越来越简单瑞典MALA公司于2001年推出了X3M主机,它只能接100,250,500,800兆屏蔽天线.由于它的主机直接固定在天线上,不需要光纤或电缆来连接,使用起来比较方便.开发该主机的目的是为了进行地下管线探测.但该主机对像自来水、电力、通讯等公用事业部门的用户来说,依然是太复杂了.有鉴于此,MALA公司于2002年又推出了Easy Locator管线探测雷达,它只是用来寻找管线,操作起来非常简单.后来,MALA公司又内置了Object Mapper管线定位软件.这样用户即使没有任何物探知识,也能使用该产品.图六Easy Locator管线探测雷达今年,瑞典MALA公司又推出了CX10和CX11混凝土无损成像系统(雷达),它是把雷达主机的部分集成到监视器中,使其成为一个整体.该系统可以配备两个天线:1.2G和1.6G.同时该雷达可以选配50Hz探头,用来对供电的电缆进行精确定位.该产品也内置了数据采集和处理软件,同时内置了2.5维网格数据处理软件,可以在采集现场自动对不同深度的混凝土状况进行切片显示.该产品因其使用的方便性,低廉的价格,必将在混凝土无损检测中发挥越来越大的作用.图七CX10混凝土无损成像系统4、出现真正三维成像雷达我们上面提及的瑞典雷达的多道模块MC4和MC16,它们虽然也可以用来进行三维数据采集.其它厂家也有做类似工作的雷达系统.但真正称得上三维雷达的恐怕只有MALA公司的雷达天线阵Witten.该系统是因其在美国世贸大厦废墟的探测应用而为世人所知.图八瑞典的雷达天线阵Witten在世贸大厦废墟上进行探测由于该系统内装了几十个天线,因此它可以得到不同偏移距的反射数据,通过对该系统专门开发的处理软件进行处理,其结果是非常令人鼓舞的.图九用Witten做的不同深度的水平切片,其效果非常逼真图十用Witten做的某街道地下12吋处的切片图遗憾的是,该产品瑞典MALA公司只是用来做工程,并没有将其推向市场.雷达未来发展预测1、硬件方面:从目前的发展趋势来看,雷达在硬件设计方面的趋势是模块化设计,即雷达产品在设计时将尽量把系统的共用部分做成单独部分,以便让不同频率的天线共同使用。
地质雷达技术应用.ppt

岩土介质雷达波谱特性
雷达目标波相识别的三项基本要 点3
要点3:反射波同向轴形态特征: 雷达记录资料中,同一连续界面的反射信号形成同相 轴,依据同向轴的时间、形态、强弱、方向反正等进行 解释判断是地质解释最重要的基础。同向轴的形态与埋 藏的物界面的形态并非完全一致,特别是边缘的反射效 应,使得边缘形态有较大的差异。对于孤立的埋设物其 反射的同向轴为向下开口的抛物线,有限平板界面反射 的同向轴中部为平板,两端为半支下开口抛物线
地质雷达的原理
• 地质雷达利用超高频电 磁波探测地下介质分布,它 的基本原理是:发射机通过 发射天线发射中心频率为 12.5M至1200M、脉冲宽度 为0.1 ns的脉冲电磁波讯 号。当这一讯号在岩层中遇 到探测目标时,会产生一个 反射讯号。直达讯号和反射 讯号通过接收天线输入到接 收机,放大后由示波器显示 出来。根据示波器有无反射 汛号,可以判断有无被测目 标;根据反射讯号到达滞后 时间及目标物体平均反射波 速,可以大致计算出探测目
工程质量检测
• 地质雷达最早用于工程场地的勘查,包括重要 工程场地、铁路与公路路基,用以解决松散层 分层和厚度分布,基岩风化层分布,以及节理 带断裂带等问题。有时也用于研究地下水水位 分布,普查地下溶洞、人工洞室等。在粘土不 发育的地区,使用中低频大功率天线,探查深 度可达20m-30m以上。在地震地质研究中, 地质雷达也用于研究隐伏活断层分布,效果很 好。 •
天线与采集参数选定
天线选择 • 衬砌检测900MHZ天线 2 衬砌与围岩检测600MHZ天线 3 路面检测1.2-1.4GHZ天线 4 路基600/900MHZ天线 参数设置 1 记录长度ns [2•h(m)/ 0.1(m/ns)]•1.5 2 样点数512,1024,2048 S(samp/scan)•scan/sec•Bit/samp 3 带宽设定 高截2倍,低截1/2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二讲国内外地质雷达技术发展状况(历史与现状)探地雷达的历史最早可追溯到20世纪初,1904年,德国人Hulsmeyer首次将电磁波信号应用与地下金属体的探测。
1910年Leimback和Lowy以专利形式在1910年的专利,他们用埋设在一组钻孔里的偶极子天线探测地下相对高的导电性质的区域,并正式提出了探地雷达的概念。
1926年Hulsenbeck第一个提出应用脉冲技术确定地下结构的思路,指出只要介电常数发生变化就会在交界面会产生电磁波反射,而且该方法易于实现,优于地震方法[1,2]。
但由于地下介质具有比空气强得多的电磁衰减特性,加之地下介质情况的多样性,电磁波在地下的传播比空气中复杂的多,使得探地雷达技术和应用受到了很多的限制,初期的探测仅限于对波吸收很弱的冰层厚度(1951,B.O.Steenson,1963,S.Evans)和岩石和煤矿的调查(J.C.Cook)等。
随着电子技术的发展,直到70探地雷达技术才重新得到人们的重视,同时美国阿波罗月球表面探测实验的需要,更加速了对探地雷达技术的发展,其发展过程大体可分为三个阶段:第一阶段,称为试验阶段,从20世纪70年代初期到70年代中期,在此期间美国,日本、加拿大等国都在大力研究,英国、德国也相继发表了论文和研究报告,首家生产和销售商用GPR的公司问世,即Rex Morey和Art Drake成立的美国地球物理测量系统公司(GSSI),日本电器设备大学也研制出小功率的基带脉冲雷达系统。
此期间探地雷达的进展主要表现在,人们对地表附近偶极天线的辐射场以及电磁波与各种地质材料相互作用的关系有了深刻的认识,但这些设备的探测精度、地下杂乱回波中目标体的识别、分别率等方面依然存在许多问题。
第二阶段,也称为实用化阶段,从20世纪70年代中后其到80年代,在次期间技术不段发展,美国、日本、加拿大等国相继推出定型的探地雷达系统,在国际市场,主要有美国的地球物理探测设备公司(GSSI)的SIR系统,日本应用地质株式社会(OYO)的YL-R2地质雷达,英国的煤气公司的GP管道公司雷达,在70年代末,加拿大A-Cube公司的Annan和Davis等人于1998年创建了探头及软件公司(SSI),针对SIR系统的局限性以及野外实际探测的具体要求,在系统结构和探测方式上做了重大的改进,大胆采用了微型计算机控制、数字信号处理以及光缆传输高新技术,发展成了EKKO Ground Penetrating Radar 系列产品,简称EKKO GPR系列。
瑞典地质公司(SGAB)也生产出RAMAC 钻孔雷达系统,此外,英国ERA公司、SPPSCAN公司,意大利IDS公司、瑞典及丹麦也都在生产和研制各种不同型号的雷达。
80年代全数字化的GPR问世,具有划时代的意义,数字化GPR不仅提供了大量数据存储的解决方案,增强了实时和现场数据处理的能力,为数据的深层次后处理带来方便,更重要的是GPR 因此显露出更大的潜力,应用领域得以向纵身拓展。
第三阶段,从上个世纪80年代至今,可称为完善和提高阶段。
在此期间,GPR技术突飞猛进,更多的国家开始关注探地雷达技术,出现了很多探地雷达的研究机构,如荷兰的应用科学研究组织和代尔夫大学,法国_德国的Saint-Louis 研究所(ISL),英国的DERA,瑞典的FOA,娜威科技大学和地质研究所,比利时的RMA,南非的开普敦大学,澳大利亚昆士兰大学,美国的林肯实验室和Lawrence Livermore国家实验室以及日本的一些研究机构等等。
同时,探地雷达也得到了地球物理和电子工程界的更多关注,对天线的改进、信号的处理、地下目标的成像等方面提出了许多新的见解。
GSSI公司在商业上取得了极大的成功,并在1990年被OYO公司收购,Pulse Radar 公司、Panetradar 公司以及加拿大的SSI公司也在此时迅速发展壮大。
进入21世纪以后,探地雷达逐渐的象更多的领域拓展,在矿产调查、考古、地质勘探、铁路、公路、水文、农业、环境工程、土木工程、市政设施维护以及刑事勘察等各领域都有重要的应用,用以解决地质构造、场地勘察、线路选择、工程质量检测、病害诊断、超前预报、垃圾填埋场环境污染研究等问题。
我国探地雷达的研制工作起步较晚,于上个世纪70年代中期,由煤炭科学研究总院重庆分院高克德教授为首的探地雷达专题小组,针对煤矿生产特点研制开发出了一套探地雷达系列产品——KDL系列矿井防爆雷达仪,开创了我国自主研制地质雷达的先河。
直到80年代末90年代初,随着国内探地雷达仪器研制水平的提高及国外先进的仪器引进,国内不少高校和科研单位开展过地下目标探测方面的工作,其中电子科技大学、西安交通大学、二十二所、五十所、长春物理所、北京遥感设备研究所、北京理工大学、清华大学、西南交通大学、北京爱迪尔公司等单位先后研制过探地雷达试验系统,并在其中某些技术上取得一些成果。
90年代末和本世纪初,中国矿业大学(北京)彭苏萍教授根据国内煤炭发展需要,成立仪器项目开发项目组,开始着手地质雷达的研制与开发,并于2004年开发出具有自主知识产权的地质雷达产品。
近几年来,探地雷达在硬件方面的发展已趋于平稳,仪器生产厂家把重点放在了数据采集速率和信噪比的提高,以及数据处理和解释软件的智能化方面。
1.2.2 探地雷达信号处理与解释的发展现状雷达波在地下的传播过程十分复杂,各种噪声和杂波的干扰非常严重,正确识别各种杂波和噪声,提取有用信息是探地雷达记录解释的重要环节,关键技术是对雷达记录进行各种数据处理。
由于电磁波在地下的传播形式与地震波十分相似,而且探地雷达数据剖面也类似于反射地震数据剖面,因此反射地震数据处理的许多有效技术均可用于探地雷达数据处理,但由于雷达波和地震波存在着动力学差异如强衰减性,所以单一地移植、借鉴地震资料处理技术是不够的,文献[20]对反射地震与探地雷达进行了详细的比较,指出雷达波在湿的地层中衰减比在干的情况下要大,而地震波却恰好相反,探地雷达的穿透深度比地震波要浅得多。
雷达信号常规的处理方法主要有:多次叠加来压制随即噪声;单道测量记录减去各道平均值来压制相干噪声;时变增益来校正由波前扩展及介质吸收引起的信号损失;低频、高通、带通等频率域滤波消除不必要的干扰频率;反褶积处理把雷达记录变成反射系数序列以达到消除大地干扰、分辨薄层的目的;偏移处理则是把雷达记录中的每个反射点移到其本来位置,从而获得反映地下介质的真实图像,偏移处理对消除直立体的绕射、散射产生的相干干扰能起到很大的作用。
随着数字信号处理技术的发展,又产生了许多新的雷达信号处理方法,如利用小波变换的调焦功能和频域-时域双重局部性来压制噪声;将小波和神经网络相结合实现雷达信号去噪目的;根据雷达有效信号和干扰信号在视速度上的差异,在频率-波数域上进行二维滤波达到去噪目的;通过分形技术、Hilbert变换等方法来提取雷达波的有效信息来提高分辨率;利用水平预测技术实现雷达信号水平噪声的干扰;利用雷达信号的统计学特征来实现去噪的目的等等。
总之,雷达信号处理的方法类型很多,不同的方法用在不同的实际情况又不同的应用效果。
探地雷达解释模型主要包括正演模型和反演模型。
在数值模拟正演技术方面,众多的研究成果在上世纪九十年代得到详尽地报道。
其中有代表性的文献有:Burke and Miller (1984)和Turner(1994)分别采用磁矩法模拟了半空间的线状物体的响应和在地球表面不同高度上偶极天线的近区和远区场特征和天线输入阻抗随大地电学性质的变化。
Carcione J. M.(1996,1998)阐述了有耗各向异性介质中探地雷达波理论和二维TM 及TE 模式波场的数值模拟技术,以及雷达天线的辐射模式研究。
Cai(1995)应用射线追踪法进行了二维介质中雷达波的传播与模拟研究。
随着计算电磁学技术的发展,时间域有限差分法成为探地雷达模拟计算的首选方法。
在此后一段时间内,发表了大量文章描述该技术在探地雷达天线辐射正演模拟方面的应用。
其中典型代表作有:Maloney et al., (1990), Tirkas and Balanis (1992), Roberts,R. L.和Daniels, J. J.(1997)等等。
我国学者在这方面也进行许多探索,沈飚等于1997年以实际发射的脉冲子波为基础,利用正演模拟技术,模拟了雷达波在层状铺垫介质中的反射曲线,分析、解释了与之对应的公路路面下的铺垫结构。
西安电子科技大学的詹毅利用FDTD方法研究了脉冲探地雷达在有耗、色散、不均匀土壤中的应用;何兵寿、岳建华、邓世坤、冯德山等也利用FDTD方法对探地雷达进行了数值模拟研究不同地电模型雷达波德响应特征,FDTD方法的应用使探地雷达的理论研究达到了一个新的高峰。
在反演方面,德国Makky S.Jaya等人提出了一种改进的反演模型,并用测试数据成功地反演出埋藏在混凝土中钢筋的图像。
文海玉采用全局优化反演算法,毅探地雷达资料的观测数据与正演合成数据之差的平方合作为目标函数,反演除地下介质的参数;王兆磊利用地质雷达二维数据资料反演了地下介质的参数;但总体说来与实际应用相差较远,因而目前能用于探地雷达数据解释或反演的成果并不多见。
2.2 国外地质雷达技术发展状况2.2.1国外地质雷达技术发展概况2.2.1.1美国的地质雷达技术美国有三个地质雷达厂家,GSSI是规模较大的一家(劳累代理),此外有PLUS RODAR(郑州大学张培代理)和PENETRADAR(欧美大地代理)。
GSSI公司成立与1970年,1990年加入OYO集团,推出SIR-10型雷达,销售了150套,1994年推出SIR-2型雷达,4个月内销售25套。
上世纪末本世纪初推出了SIR2000, 最近网上又推出SIR3000。
美国PLUS RODAR公司的PLUS RODAR Ⅴ型路用雷达,采用空气耦合双及型天线,有250MHz,500MHz,1GHz,2GHz多种型号。
同时可安装4个不同频率的天线,测量速度可达110km/h。
美国PENETRADAR公司创建于1974年,一直从事高精度路面雷达系统的设计开发,该公司的IRIS/IRIS-L型路面雷达已作为美国路桥检测的工业标准。
在中国有十几家用户。
2.2.1.2英国ERA公司SPRSCAN雷达英国有有两家雷达生产商,分别是ERA公司和SEARCHWELL公司。
目前对于他们产品的详情了解甚少。
2.2.1.3意大利IDS公司RIS-2K/MF雷达意大利意锐(IDS)公司生产的RIS-2K/MF雷达(北京博态克公司代理),多通道雷达。
IDS公司具有多年国防及卫星雷达经验,民用始于于20年前,意大利电信在安装前光纤前需探测地下目标,提出了及其严格的要求,IDS公司为此研制出RIS-2K/MF雷达系统。