驱动器故障代码表
力士乐驱动器报警代码表

力士乐驱动器报警代码DKC故障诊断1诊断信息F和诊断信息E的说明1.1错误诊断信息FF205 凸轮轴故障F207 切换至未初始化运行模式F208 UL电机类型已变F209 PL装载参数默认值F211 DISC-Error no.1(1#错误)F212 DISC-Error no.2(2#错误)F212 DISC-Error no.3(3#错误)F212 DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器1故障:象限错误F230 超过编码器1最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器2故障:信号幅度错误F245 编码器2故障:象限错误F246 超过编码器2最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD模块固件升级过程中出现错误F291 EMD模块超时F292 EMD模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双MST故障关机F402 双MDT故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST故障关机F434 紧停E-STOPF629 超过正行程极限F630 超过负行程极限F634 紧停E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器1故障:信号幅度错误F843 编码器2故障:信号幅度错误F845 编码器2故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2报警诊断信息EE211 DISC-#1报警E212 DISC-#2报警E212 DISC-#3报警E212 DISC-#4报警E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动E260 指令电流限制活动E261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD模块固件升级活动E289 等待Ecox服务器端扫描E291 EMD模块超时E293 EMD模块欠电压E296 Ecox客户端数量不准确E386 电源模块无就绪信号E408 MDT数据存储器A无效编址E409 A T数据存储器A无效编址E410 客户端未被扫描或地址为0E411 双SST故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1指令诊断信息B、C和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段3转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT的配置IDN不可配置C105 配置长度大于MDT最大长度C106 A T的配置IDN不可配置C107 配置长度大于A T最大长度C108 时间片参数大于Sercos循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115 T2数值太小C118 MDT配置顺序错误C200 通讯阶段4转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014不准确C210 要求反馈2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1数据读取错误C218 反馈2数据读取错误C220 反馈1初始化错误C221 反馈2初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166和P-0-0167D906 位移范围超出2.2状态诊断信息AA000 通讯阶段0A001 通讯阶段1A002 通讯阶段2A003 通讯阶段3A009 SERCOS接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1的位置模式A103 使用编码器2的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1A109 驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1, 虚拟主驱动器A113 相位同步,编码器2. 虚拟主驱动器A114 相位同步,编码器1. 真实主驱动器A116 相位同步,无滞后,编码器1, 虚拟主驱动器A117 相位同步,无滞后,编码器2, 虚拟主驱动器A118 相位同步,无滞后,编码器1, 真实主驱动器A128 凸轮轴,编码器1, 虚拟主驱动器A129 凸轮轴,编码器2, 虚拟主驱动器A130 凸轮轴,编码器1, 真实主驱动器A132 凸轮轴,无滞后,编码器1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器1, 真实主驱动器A150 驱动器控制的定位,编码器1A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码故障描述对策C0270 电机编码器数据读取错误电机编码器回路故障,检查可能出现的三个地方:电机编码器,反馈线及CSB的编码器反馈口。
驱动器故障代码
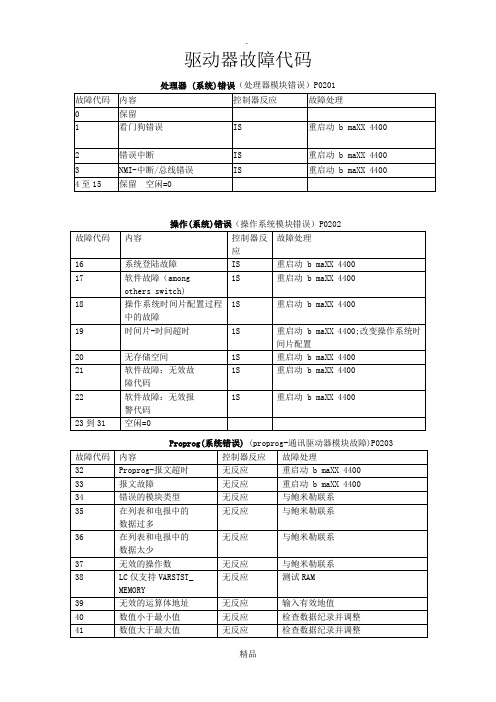
内容
控制器反应
故障处理
64
主电源故障(电网故障)
可通过P297调整
重新连接供电电源
65到79
保留 Idle=0
AmpError(功率模块故障)P0206
故障代码
内容
控制器反应
故障处理
80
根据Hiperface 说明的通讯故障
IS
参阅84页“功率单元
(Hiperface)P0233”
(=3.Level)
48
功能模块A故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
49
功能模块B故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
50
功能模块C故障
级别3故障
P0240 to P0244”118页(=3.level)
53
功能模块G故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
54
功能模块H故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
无反应
重启动 b maXX 4400
33
报文故障
无反应
重启动 b maXX 4400
34
错误的模块类型
无反应
与鲍米勒联系
35
在列表和电报中的
数据过多
无反应
与鲍米勒联系
安川伺服驱动器的常用故障代码

安川伺服驱动器的常用故障代码关键信息项:1、故障代码列表2、故障代码含义3、可能的故障原因4、故障诊断方法5、故障解决措施1、故障代码列表11 A00 过电流111 A02 过电压112 A03 低电压113 A04 过载114 A05 再生过载115 A10 过热116 A30 再生异常117 A40 主电路检测异常118 A51 超速119 A71 过载高120 A72 过载低121 A73 动态制动过载122 A74 紧急停止123 A81 编码器备份警报124 A82 编码器和数校验警报125 A83 编码器电池警报126 A84 编码器数据警报127 A85 编码器过速警报128 A90 编码器故障129 A91 位置偏差过大130 A92 电机过载2、故障代码含义21 A00 过电流:表示驱动器输出电流超过了允许的最大值。
22 A02 过电压:驱动器的直流母线电压超过了规定的上限值。
23 A03 低电压:直流母线电压低于规定的下限值。
24 A04 过载:电机的负载超过了驱动器的额定负载能力。
25 A05 再生过载:再生能量超过了驱动器的处理能力。
26 A10 过热:驱动器内部温度过高。
27 A30 再生异常:再生电路工作不正常。
28 A40 主电路检测异常:主电路的检测环节出现故障。
29 A51 超速:电机转速超过了设定的最高速度。
210 A71 过载高:负载超过了驱动器的高过载设定值。
211 A72 过载低:负载超过了驱动器的低过载设定值。
212 A73 动态制动过载:动态制动过程中出现过载。
213 A74 紧急停止:系统触发了紧急停止信号。
214 A81 编码器备份警报:编码器的备份数据出现问题。
215 A82 编码器和数校验警报:编码器的数据校验错误。
216 A83 编码器电池警报:编码器的电池电量低或故障。
217 A84 编码器数据警报:编码器的数据传输或处理出现异常。
218 A85 编码器过速警报:编码器的转速超过了允许范围。
伺服驱动器故障代码

伺服驱动器故障代码
E001:过流保护。
可能是由于负载过大、过热、电机故障或电源不稳定等原因引起。
E002:过压保护。
可能是由于电源电压过高或驱动器内部故障引起。
E003:欠压保护。
可能是由于电源电压过低或驱动器内部故障引起。
E004:电源相序保护。
可能是由于三相电源接错或相序不对引起。
E005:编码器信号丢失。
可能是由于编码器损坏、连接不良或电缆故障等原因引起。
E006:位置误差过大。
可能是由于位置环节参数设置不当、负载变化过大或编码器信号不稳定等原因引起。
E007:电机超温保护。
可能是由于连续工作时间过长、散热不良或电机内部故障引起。
E008:跟随误差过大。
可能是由于速度环节参数设置不当、控制指令过大或负载变化过大等原因引起。
E009:伺服报警。
可能是由于控制系统出现异常、电源电压不稳定或驱动器内部故障等原因引起。
OTIS故障代码故障总汇
O T I S故障代码故障总汇 The pony was revised in January 2021目录OVF402,OVF404,OVF406驱动器故障代码........................ 错误!未定义书签。
OTIS电梯GECB板故障代码....................................................... 错误!未定义书签。
奥的斯GEN2电梯故障代码说明................................................ 错误!未定义书签。
奥的斯清除故障方法...................................................................... 错误!未定义书签。
OTIS XIZI OTIS 21VF/ 故障代码表 ........................................... 错误!未定义书签。
MCS321/故障代码表 ........................................................................................ 错误!未定义书签。
TOEC2000/故障代码表 ......................................................................................... 错误!未定义书签。
300VF?故障代码表............................................................................ 错误!未定义书签。
西奥21VF(XO21VF)......................................................................... 错误!未定义书签。
sinee伺服驱动器故障代码
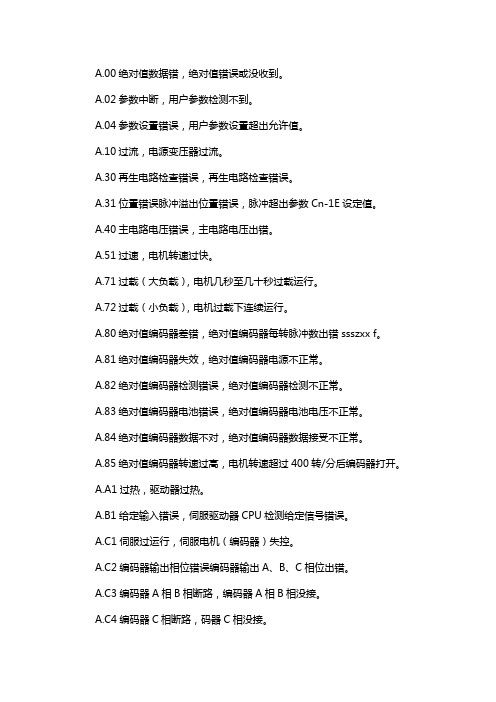
A.00绝对值数据错,绝对值错误或没收到。
A.02参数中断,用户参数检测不到。
A.04参数设置错误,用户参数设置超出允许值。
A.10过流,电源变压器过流。
A.30再生电路检查错误,再生电路检查错误。
A.31位置错误脉冲溢出位置错误,脉冲超出参数Cn-1E设定值。
A.40主电路电压错误,主电路电压出错。
A.51过速,电机转速过快。
A.71过载(大负载),电机几秒至几十秒过载运行。
A.72过载(小负载),电机过载下连续运行。
A.80绝对值编码器差错,绝对值编码器每转脉冲数出错ssszxx f。
A.81绝对值编码器失效,绝对值编码器电源不正常。
A.82绝对值编码器检测错误,绝对值编码器检测不正常。
A.83绝对值编码器电池错误,绝对值编码器电池电压不正常。
A.84绝对值编码器数据不对,绝对值编码器数据接受不正常。
A.85绝对值编码器转速过高,电机转速超过400转/分后编码器打开。
A.A1过热,驱动器过热。
A.B1给定输入错误,伺服驱动器CPU检测给定信号错误。
A.C1伺服过运行,伺服电机(编码器)失控。
A.C2编码器输出相位错误编码器输出A、B、C相位出错。
A.C3编码器A相B相断路,编码器A相B相没接。
A.C4编码器C相断路,码器C相没接。
A.F1电源缺相,主电源一相没接。
A.99无错误,操作状态不正常。
rexroth伺服驱动器故障代码
WORD格式C204:(伺服电机编码器接头接触不好)C601:C602:回零故障。
(将S-0-0288显示出来的数值写到S-0-0289上即可解决)E257:直流限制功能发生作用。
说明驱动器超载。
(XX二厂新两鼓成型机径向后压辊电机通电后出现自激吱吱声,一会驱动器便出现报警参数E257,随后又出现F219。
最后查原因是电机三相相序接错了)E410:不能随动或扫描0#地址。
F219:电机过热关断。
F220:负载势能超出伺服驱动器吸收能力。
(XX二厂老厂18V两鼓成型机在进行第十一步侧压辊反包滚压动作时,主鼓在侧压辊反包滚压动作结束、旋转停止时,主轴伺服驱动器报警F220。
而在其它正、反转动作时则没有问题。
将S-0-0100参数由原来的4﹒5改变为10;将S-0-0101参数由7改变为5后将问题解决。
小魏说:如果再不能解决问题,也可用将各个驱动器上顶部的L1和L2两个端子点分别串联在一起的方法加以解决)F228:过分偏差。
(XX二厂新两鼓成型机调试时主机鼓伺服曾经出现过这个报警,查其原因是连接编码器的齿型带过于松弛,信号跳动变化太大所致。
主机机械制动闸脱离不干净或机械旋转系统捌劲,也会出现这个报警。
用加大S-0-0159的值加以解决)F237:设定的位置或速度值超出系统(伺服驱动器)允许的最大值。
(XX黄海橡胶集团公司新厂19V两鼓成型机试车时在后压辊径向伺服驱动器上曾经出现过这个报警信号,表现为后压辊径向运转速度非常的慢。
就象是齿数比给定的不对一样。
但将伺服参数再次拷贝(F5)一遍就好了)(在调试XX载重轮胎厂工业胎成型机时,当从DriveTop看完主机驱动参数将其关闭后,成型鼓正转有且正常,而反转没有,一起动便出现F237报警.经查看是S_393<控制值方式为模数格式>的最后一位由0变为1所致.复原为0便好了)F434:紧急停止.伺服驱动器紧急停止功能起动.F822:伺服电机编码器信号没有或太小。
安川驱动动器报警代码
警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.020 用户参数和数检查异常1 伺服单元内部参数的数据异常DB 停止否HA.021 参数格式化异常1 伺服单元内部参数的数据异常DB 停止否A.022 系统参数和数检查异常1 伺服单元内部参数的数据异常DB 停止否A.023 参数密码异常1 伺服单元内部参数的数据异常DB 停止否A.02A 用户参数和数检查异常2 伺服单元内部参数的数据异常DB 停止否A.02b 系统参数和数检查异常2 伺服单元内部参数的数据异常DB 停止否A.030 主电路检测部分异常电源电路的各种检测数据异常DB 停止可A.040 用户参数设定异常1 用户参数的值超出设定范围DB 停止否A.04A 用户参数设定异常2 用户参数的值超出设定范围DB 停止否A.041 分频脉冲输出设定异常PG 分频比设定(Pn212) 不满足设定范围或设定条件。
DB 停止否A.042 参数组合异常多个用户参数的组合超出了设定范围DB 停止否A.050 组合错误伺服电机与伺服单元的容量不正确DB 停止可A.051 产品未支持警报连接了不支持的串行转换单元DB 停止否A.0b0 伺服ON 指令无效警报使用以操作器可伺服ON 的功能后,以控制指令进行了伺服ONDB 停止可A.100 过电流或散热片过热IGBT 产生过热电流或者伺服单元的散热片过热DB 停止否A.300 再生异常再生电阻断线再生晶体管故障DB 停止可A.320 再生过载再生能量超过再生电阻的容量零速停止可A.330 主电路配线错误主电路的供电方法与用户参数Pn001 的设定不符DB 停止可A.400 过电压主电路DC 电压异常高DB 停止可A.410 不足电压主电路DC 电压过低零速停止可A.510 过速伺服电机的转数异常高DB 停止可A.511 分频脉冲输出过速超出了已设的PG 分频比(Pn212) 的电机转速上限DB 停止可A.520 振动警报检测出电机转速异常振动DB 停止可A.521 自动调谐警报自动调谐时的转动惯量比计算异常DB 停止可A.710 过载( 瞬间最大负载) 以大幅度超额的转矩进行了数秒至数十秒的运行零速停止可A.720 过载( 连续最大负载) 以超额定值的转矩进行了连续运行DB 停止可A.730A.731DB 过载由于DB( 动态制动器) 动作,旋转能量超过了DB 电阻的容量DB 停止可A.740 冲击电阻过载主电路电源频繁地重复ON/OFF DB 停止可A.7A0 散热片过热伺服单元的散热片过热零速停止可表10.1 警报显示与输出一览( 续)警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.810 编码器备份警报编码器的电源完全耗尽,位置数据被清除DB 停止否HA.820 编码器和数校验警报编码器存储器的和数校验结果异常DB 停止否A.830 编码器电池警报绝对值编码器备用电池电压下降DB 停止可A.840 编码器数据警报编码器的内部数据异常DB 停止否A.850 编码器过速电源ON 时,编码器高速旋转DB 停止否A.860 编码器过热编码器的内部温度过高DB 停止否A.870 全封闭序列器编码器和数检查警报编码器存储器的和数检查结果出错DB 停止否A.880 全封闭序列器编码器数据警报编码器的内部数据异常DB 停止否A.8A0 全封闭序列器编码器标度异常线性编码器出现故障DB 停止可A.8A1 全封闭序列器编码器模块异常线性编码器或线性变换单元发生故障DB 停止可A.8A2 全封闭序列器编码器传感器异常( 增量型)线性编码器出现故障DB 停止可A.8A3 全封闭序列器编码器位置异常( 绝对值)编码器的前馈位置上发生异常DB 停止可A.b31 电流检测异常1 U 相电流检测器异常DB 停止否A.b32 电流检测异常2 V 相电流检测器异常DB 停止否A.b33 电流检测异常3 电流检测器异常DB 停止否A.b6A MECHATROLINK通信ASIC异常1 MECHATROLINK 通信ASIC 异常DB 停止否A.b6b MECHATROLINK通信ASIC异常2 MECHATROLINK 通信ASIC 中发生了致命的错误DB 停止否A.bF0 系统警报0 发生了伺服单元内部程序异常0 DB 停止否A.bF1 系统警报1 发生了伺服单元内部程序异常1 DB 停止否A.bF2 系统警报2 发生了伺服单元内部程序异常2 DB 停止否A.bF3 系统警报3 发生了伺服单元内部程序异常3 DB 停止否A.bF4 系统警报4 发生了伺服单元内部程序异常4 DB 停止否A.C10 防止失控检测伺服电机发生失控DB 停止可A.C80 编码器清除异常旋转圈数上限值设定异常绝对值编码器的多旋转量的清除或者设定不正确DB 停止否A.C90 编码器通信异常无法进行编码器与伺服单元间的通信DB 停止否A.C91 编码器通信位置数据加速度异常编码器的位置数据的计算中发生了异常DB 停止否A.C92 编码器通信定时器异常编码器和伺服单元间的通信用定时器发生了异常DB 停止否A.CA0 编码器参数异常编码器的参数被破坏DB 停止否A.Cb0 编码器回送校验异常与编码器的通信内容错误DB 停止否0 旋转圈数上限值不一致编码器与伺服单元的旋转圈数上限值不一致DB 停止否A.CF1 全封闭串行变换单元通信异常( 接收失败)全封闭串行变换单元的通信异常DB 停止否A.CF2 全封闭串行变换单元通信异常( 定时器停止)全封闭串行变换单元的通信异常DB 停止否表10.1 警报显示与输出一览( 续)警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.d00 位置偏差过大位置偏差超过了用户参数(Pn520) 的设定值DB 停止可HA.d01 伺服ON 时位置偏差过大报警伺服ON 时,积存的位置偏差超过了用户参数(Pn526) DB 停止可A.d02 伺服ON 时速度限制所引起的位置偏差过大警报在位置偏差脉冲积存状态下伺服ON,则通过PN529 执行速度限制。
yukon drive驱动器故障代码
yukon drive驱动器故障代码1.1 错误诊断信息F F205 凸轮轴故障F207 切换至未初始化运行模式F208 UL 电机类型已变F209 PL 装载参数默认值F211 DISC-Error (1#错误)F212 F212 F212 DISC-Error no.2(2#错误) DISC-Error no.3(3#错误) DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过zui大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器1 故障:象限错误F230 超过编码器1 zui大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器2 故障:信号幅度错误F245 编码器2 故障:象限错误F246 超过编码器2 zui大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD 模块固件升级过程中出现错误F291 EMD 模块超时F292 EMD 模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双MST 故障关机F402 双MDT 故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST 故障关机F434 紧停E-STOP F629 超过正行程极限F630 超过负行程极限F634 紧停E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器1 故障:信号幅度错误F843 编码器2 故障:信号幅度错误F845 编码器2 故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v 直流错误F873 电源驱动部分故障F878 速度环错误上海雷煜自动化科技专业维修力士乐伺服驱动器F880 经过优化的换算偏置错误1.2 报警诊断信息E E211 DISC-#1 报警E212 E212 E212 DISC-#2 报警DISC-#3 报警DISC-#4 报警E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091 E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD 模块固件升级活动EMD 模块超时EMD 模块欠电压Ecox 客户端数量不准确E289 等待Ecox 服务器端扫描E291 E293 E296E386 电源模块无就绪信号E408 MDT 数据存储器A 无效编址E409 AT 数据存储器A 无效编址E410 客户端未被扫描或地址为0 E411 双SST 故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2 诊断信息B、C、D 和诊断信息A 的说明2.1 指令诊断信息B、C 和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段3 转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT 的配置IDN 不可配置C105 配置长度大于MDT zui大长度C106 AT 的配置IDN 不可配置C107 配置长度大于AT zui大长度C108 时间片参数大于Sercos 循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1 大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4 大于TScyc(S-0-0002)-T4min(S-0-0005)C115 T2 数值太小C118 MDT 配置顺序错误C200 通讯阶段4 转换检查C201 无效参数(S) (->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014 不准确C210 要求反馈2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1 数据读取错误C218 反馈2 数据读取错误C220 反馈1 初始化错误C221 反馈2 初始化错误C223 zui大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2 功能错误(->S-0-0022) C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022) C300 指令设定测量C302 未安装测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1 类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166 和P-0-0167D906 位移范围超出2.2 状态诊断信息AA000 通讯阶段0 上海雷煜自动化科技专业维修力士乐伺服驱动器A001 通讯阶段1A002 A003 A009 通讯阶段2 通讯阶段3 SERCOS 接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1 的位置模式A103 使用编码器2 的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1A109 驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1, 虚拟主驱动器A113 相位同步,编码器2. 虚拟主驱动器A114 相位同步,编码器1. 真实主驱动器A116 相位同步,无滞后,编码器1, 虚拟主驱动器A117 相位同步,无滞后,编码器2, 虚拟主驱动器A118 相位同步,无滞后,编码器1, 真实主驱动器A128 凸轮轴,编码器1, 虚拟主驱动器A129 凸轮轴,编码器2, 虚拟主驱动器A130 凸轮轴,编码器1, 真实主驱动器A132 凸轮轴,无滞后,编码器1,虚拟主驱动器A133 凸轮轴,无滞后,编码器2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器1, 真实主驱动器A150 驱动器控制的定位,编码器上海雷煜自动化科技专业维修力士乐伺服驱动器1 A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2 A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2。
驱动器故障代码
驱动器故障代码状态显示 闪烁故障信息 处理措施A1 ※ C3口2脚无输入 检查PLC模拟量输出模块到驱动器C3口2脚的接线A2 ※ C3口3脚无输入 检查PLC模拟量输出模块到驱动器C3口3脚的接线A3 ※ C3口2和3脚无输入 检查PLC模拟量输出模块到驱动器C3口2、3脚的接线c ※ 工控机与驱动器通讯中断或者是EPROM故障;检查工控机与PLC的通讯及通讯设置F ※ 电机处于折返状态检查电动缸位置是否已到极限H ※ 电机过温或电机温度反馈线断 检查电机和温度反馈线(电缆旋变反馈与驱动器端的插头),正常时插头端b2与b6之间的电阻为0欧姆;L1 ※ 正转限位开关打开检查电动缸位置是否已到极限L2 ※ 反转限位开关打开检查电动缸位置是否已到极限L3 ※ 正转和反转限位开关打开检查电动缸位置是否已到极限L4 ※ 软件正转限位开关打开检查电动缸软件正转限位是否已打开L5 ※ 软件反转限位开关打开检查电动缸软件反转限位是否已打开r1 ※ 电机旋变反馈线断 检查电机旋变反馈插头:b3与b7之间为28欧姆,b4与b8之间为28欧姆,b5与b9之间为15欧姆;P ※ 电机过电流 检查电动缸电源线是否短路、电动缸是否卡死r0 ※ 外部电机反馈故障检查电动缸位置反馈线u ※ 低电压 检查电源8 ※ 检测指示 电动缸无使能信号,检查操作方式是否在点动或自动位,驱动器C3口7、8脚间是否有24Vt ※ 驱动器过温 驱动器冷却后再使用0 ※ 电源电压过高 降低电源电压,直至符合要求;u ※ 电源电压过低 提升电源电压,直至符合要求;r ※ 电机旋变反馈线断或旋变反馈故障 检查驱动器C2 的25针插头1-2,4-5两对线与电机之间的电阻,正常每一对线之间的电阻为20~30欧姆,否则为断线;j ※ 电机过速 电机速度环设置的限制速度不正确,重新设置;电动缸重新通电;I ※ 驱动器RAM故障更换驱动器8. 同时闪烁 驱动器程序出错清除驱动器原有的程序,重新导入正确的程序;处理措施:驱动器通电,接好驱动器与工控机的通讯线,打开驱动器参数设置界面并通讯,在主界面点击标题栏:先取消使能,“VIEW”的“Ternial”,输入命令“clreeprom”,然后敲回车键,退出通讯界面,断开驱动器电源;打开另外一流好的驱动器电源并通讯,点击主界面标题栏“Edit”中的Backup Variables”,点击右侧FILE中“RECEIVE”,驱动器的所有参数都将出现,点击“SAVE”命令保存参数,注意保存的文件名和保存路径,退出主界面;再次打开有故障的驱动器并通讯,点击主界面标题栏“Edit”中的Backup Variables”,出现参数界面,点击右侧FILE中“OPEN”,打开先前保存的文件,点击右侧“XmiT”,再次保存即可解决问题;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7385 置差别过大。
源断开
7391 反馈电平超限
反应2:减速/制动/电 源断开
7392 反馈电平过低
反应2:减速/制动/电 源断开
54 29588 55 29589 56 29600 57 29601 58 29605 59 29606 60 29607 61 29608 62 29609 63 29610 64 29611 65 29612 66 29616 67 29824 68 29825 69 29826 70 29827 71 29828 72 29829 73 29830 74 29831 75 29832
反应2:减速/制动/电 源断开
凸轮指令:当前不 反应2:减速/制动/电
8192 允许执行该指令。 源断开
8193 8194 8195
指令:为选择CAM的 反应2:减速/制动/电
残缺表格入口 CamCommand:
源断开
invalid coupling 反应2:减速/制动/电
segment。凸轮指 源断开 CamCommand:
HEDA 同步误差错误 反应2:减速/制动/电
7590 。
源断开
7591 通信错误。
反应2:减速/制动/电 源断开
HEDA 非循环接收溢 反应1:减速时实际速
7592 出。
度保持在位置控制状态
反应2:减速/制动/电
7593 HEDA PLL 失败。 源断开
HEDA循环接收过多 反应2:减速/制动/电
凸轮发生器:凸轮 反应2:减速/制动/电
7485 数据耦合断错误 源断开
7486 7487 7488
凸轮发生器:多段 反应2:减速/制动/电
改变。
源断开
凸轮发生器:主速
度/从速度超过最大 反应2:减速/制动/电
允许值。
源断开
凸轮发生器:内部
速度值超过最大允 反应2:减速/制动/电
许。
源断开
76 30096 77 30097 78 30098 79 30099 80 30100 81 33040 82 33056 83 33072 84 33153 85 33154 86 33155 87 33156 88 33168 89 33169 90 33170 91 33171 92 33172 93 33173 94 33174 95 33175 96 33176 97 33177
6280 点分割
源断开
IEC61131-3超过循 反应2:减速/制动/电
6281 环时间
源断开
IEC61131-3 程序堆 反应2:减速/制动/电
6282 栈溢出
源断开
IEC61131-3 FB 溢 反应2:减速/制动/电
6283 出
源断开
IEC61131-3 非法指 反应2:减速/制动/电
6284 令
Ind ex 10Code 16Code ErrorMsg_CH
Error 错误
D=10code Error reaction: 错误反应
设备持续使用太久
反应1:减速时实际速 度保持在位置控制状态
1 8976 2310
2 8977 3 8978
有效电机电流监视
器
2311
反应2:减速/制动/电 源断开
反应1:减速时实际速
打开电机电流报闸 度保持在位置控制状态 反应5:在没有减速的
情况下,立即关闭电
电源状态去使能 流,制动。 反应5:在没有减速的
安全扭矩关(STO)激 情况下,立即关闭电
活
流,制动。
反应5:在没有减速的
在 STO里的安全功 情况下,立即关闭电
能错误
流,制动。
极限开关I5
54A0 (X12/12) 激活
5111 题
源断开
控制电压24V DC太 反应2:减速/制动/电
5112 高
源断开
负15V辅助电压不有 反应2:减速/制动/电
5115 问题
源断开
控制电压24V DC太 反应2:减速/制动/电
5116 低
源断开
5117 低电压选项
反应1:减速时实际速 度保持在位置控制状态
数字量输出品的电 反应2:减速/制动/电
7594 。
源断开
反应1:减速时实际速
8110 接收缓冲区溢出。 度保持在位置控制状态
CRC错误或者被动模 反应1:减速时实际速
8120 式(CAN 总线)。 度保持在位置控制状态
8130 FBI 超时。
反应1:减速时实际速 度保持在位置控制状态
8173A9 段超时
源断开
自动通讯:太多的 反应2:减速/制动/电
73AA 判断在第三阶段 源断开
自动转换:第三阶 反应2:减速/制动/电
73AB 段超时
源断开
自动转换:电机没 反应2:减速/制动/电
73AC 有连接
源断开
距离编码:参考位 反应2:减速/制动/电
73B0 置标记错误。
源断开
凸轮发生器:链接 反应2:减速/制动/电
反应2:减速/制动/电
8182 凸轮命令错误。 源断开
反应2:减速/制动/电
8183 看门狗测试动作。 源断开
为机器零点的故障 反应1:减速时实际速
8184 位置规范
度保持在位置控制状态
8190 8191
凸轮指令:未知指 令或者没有T40。 凸轮指令:SetC指 令必须在SetM之前 执行。
反应2:减速/制动/电 源断开
反应2:减速/制动/电 源断开
32 21665 33 8977 34 24593 35 24594 36 25216 37 25217 38 25218 39 25219 40 25220 41 28947 42 28961 43 29056 44 29456 45 29472 46 29475 47 29476 48 29479 49 29569 50 29570 51 29573 52 29585 53 29586
7480 表中部分数据错误 源断开
凸轮发生器:主段 反应2:减速/制动/电
7481 距离错误
源断开
凸轮发生器:未发 反应1:减速时实际速
7482 现凸轮点
度保持在位置控制状态
7483 凸轮发生器。
反应2:减速/制动/电 源断开
凸轮发生器:凸轮 反应2:减速/制动/电
7484 点联接段没找到。 源断开
自动转换:开机后 反应2:减速/制动/电
73A5 驱动无停顿。
源断开
73A6 73A7
自动转换:移动超 反应2:减速/制动/电
过60电角度。
源断开
自动转换:在第二
阶段中旋转了5°电 反应2:减速/制动/电
子角。
源断开
自动转换:第三阶 反应2:减速/制动/电
73A8 段没有停顿。
源断开
自动转换:第三阶 反应2:减速/制动/电
FF05 FF06
Fla中 Object数据 反应1:减速时实际速
版本冲突无效。 度保持在位置控制状态 没有处理数据的
目标或实际位置超 反应2:减速/制动/电
7323 过上限
源断开
目标或实际位置超 反应2:减速/制动/电
7324 出下限
源断开
7327 运动中变向
反应2:减速/制动/电 源断开
解码器输出电平过 反应2:减速/制动/电
7381 高
源断开
解码器输出电平过 反应2:减速/制动/电
7382 低
源断开
载荷与电机反馈位 反应2:减速/制动/电
现场总线同步错误 反应1:减速时实际速
81F1 。
度保持在位置控制状态
C3M: 数据交换循环 反应2:减速/制动/电
81F2 超时。
源断开
信号分析时,电压 反应2:减速/制动/电
8480 超过限制。
源断开
8612 8680
机械零点检测没有 参考点。 信号分析过程中, 位置监视范围丢失 。
反应2:减速/制动/电 源断开
5380 流短路
源断开
能耗电阻过载, 脉 反应2:减速/制动/电
5420 冲电流
源断开
能耗电阻过载, 持 反应1:减速时实际速
5421 续电流
度保持在位置控制状态
5425 能耗电阻过载
反应1:减速时实际速 度保持在位置控制状态
5480 电机制动过载
反应1:减速时实际速 度保持在位置控制状态
5481 5491 5492 5493
无
C3PM:直流总线电压 反应1:减速时实际速
11 12833 3221 太低
度保持在位置控制状态
DC link 电流低于 极限
12 12834 13 16912 14 17168 15 17424 16 17536 17 20753 18 20754 19 20757 20 20758 21 20759 22 21376 23 21536 24 21537 25 21541 26 21632 27 21633 28 21649 29 21650 30 21651 31 21664
7394 7395 73A0
反馈EEPROM数据无 效 向反馈信息存储器 EEPROM写如数据时 出错。
霍尔通信:霍尔信 号的无效组合。
反应2:减速/制动/电 源断开
反应2:减速/制动/电 源断开 反应5:在没有减速的 情况下,立即关闭电 流,制动。
霍尔转换:无效的 反应2:减速/制动/电
73A1 修正值精密角。 源断开
invalid segment. 反应2:减速/制动/电
凸轮指令:无效的 源断开
8196 8197
凸轮指令:master段 反应2:减速/制动/电