异步电动机的串级调速
第二章--绕线式异步电动机串级调速系统
b.起动控制:控制逆变角,使在起动开始的瞬间,Ud与Uβ的差值能产生 足够大的 Id ,以满足所需的电磁转矩,但又不超过允许的电流值,这样电动 机就可在一定的动态转矩下加速起动。
随着转速的增高,相应地增大角以减小值 Uβ ,从而维持加速过程中动态 转矩基本恒定 。
30
(2)调速
a.调速原理:通过改 变角的大小调节电动机 的转速。
由于电机在 低于同步转速 下工作,故称 为次同步转速 的电动运行。
sn
0 n1
~
P1 Pm
(1-s)Pm
CU
sPm
10
次同步速度电动运行状态
sPm
Te
12
不断加大+Eadd, s n
就可提高电机的转 速。当接近额定转
1
2n1
SP
速时,如继续加大
+Eadd,电机将加
P
速到s<0的新的稳
Pm
态下工作,即电机
转子电流 I2 的增大,会引起交流电动机
拖动转矩的增大,设原来电机拖动转矩与负载 相等,处于平衡状态,串入附加电势引起电 动机升速,在升速的过程中,随着速度增加, 转差率S减小,分子中sE2减小,电流也减小, 使拖动转矩减小后再次与负载平衡,降速过程 最后会在某一个较高的速度下重新稳定运行。
* 这种向上调速的情况称为高于同步速的串级调速。(超同步串调) 9
一.串级调速的原理 二.串级调速的基本运行状态及功率关系 三.附加电动势的实现 四.次同步串级调速主电路
2
一. 串级调速的原理
转子串电阻调速方法有什么缺点?
我们知道,对于绕线转子异步电动机,可以在其 转子回路串入电阻来减小电流,增大转差率,从而改 变转速。这种方法就是转子串电阻调速方法。
异步电动机的调速方法和各调速方法适用什么电动机

异步电动机的调速方法和各调速方法适用什么电动机异步电动机的调速方法有以下几种:改变电动机的极对数。
利用定子的两套或单套绕组,改变其连接方法,到达改变极对数的目的。
这种调速是分级的,不是平滑的。
改变电源的频率。
为此要有一套专用的变频电源。
改变外施电压,以改变转差率。
这种方法实用价值不大。
在转子回路中串入附加电阻。
这种方法只适用于绕线式异步电动机,可得到平滑调速。
1.变频调速向电机定子输以连续变化的频率及相应的电压,即可获得平滑的调速。
要有专用的变频变压电源。
这种调速适用于同步电机及鼠笼电动机的调速。
2.变极数调速转速n与极数P成正比,极数增加,即可降速;极数减少,即可增速。
适用于鼠笼电动机。
3.转子外接电阻调速当电网电压及频率不变时,在转子回路中串入电阻后,可以改善电动机的起动转矩,在绕线电机转子中串接启动电阻,减小启动电流。
适用于滑环电动机。
4.转子外加电压调速此方法也叫串级调速,是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,到达调速的目的。
这种方式有两种:电机反应方式和电气反应方式。
串级调速,多采用晶闸管串级调速,晶闸管低同步串级调速系统是在绕线异步电动机转子侧用大功率的晶闸管或整流二极管,将转子的转差频率交流变为直流,再用晶闸管逆变器将转子电流返回电源以改变电机转速的一种方式。
此控制调速系统效率利用率高,它能实现无级平滑调速,低速时机械特性也比较硬。
这种方法适用于滑环电动机。
此方法又有两种方式:1)电机反应方式,也叫库拉姆法,转子的转差电压经硅整流输入与主电机同轴的直流他励电机,通过直流电机的励磁调节,以调节反应量,从而获得调速。
2)电气反应方式,也叫沙尔比法,转子的转差电压经硅整流输入可控硅逆变器,逆变器交流输出通过反应变压器接与电网,改变逆变角,即可调速。
5,定子调压、转子变阻调速利用异步机转矩与定子端电压平方成正比的关系,同时利用转子改变外接电阻的关系开展调速。
转子变阻为粗调,定子调压为细调。
异步电动机的串级调速

2024年1月16日星期二
向低于同步速方向的串级调速
串附加电动势之前:电机匀速转动,I2,Te=Tl; 串附加电动势之后:
I2'
sE20 R2
E f jsX 20
I2'
I2
Te ' Te
n
s s' n s I2 ' I2 ' I2 n'
Te ' Te
电机在转速n′处实现平衡,转速调为n ′ 。
串级调速的原理与基本类型
一.串级调速的原理 二.串级调速的基本运行状态及功率关系 三.串级调速系统的基本类型
2024年1月16日星期二
绕线型异步电动机的转子
2024年1月16日星期二
绕线型异步电动机的转子
2024年1月16日星期二
集电环
三相绕线型异步电动机示意图
转子三相绕组接成 Y 形
2024年1月16日星期二
2024年1月16日星期二
4. 高于同步转速的回馈制动运行状态 s<0,Te<0。则
Pem Te0 0
PM (1 s)Pem 0 Ps s Pem 0
说通明 过电 定动 子机 回从馈轴给上电吸网收;机另械 一功 部率 分变PM为,转一差部功分率变P为s,电通磁过功产率生PemE•,f 装置回馈给电网。
迟一个角度 p 。
电流越大,这个强迫延时换相 角就越大,但有:
00 p 300
2024年1月16日星期二
3.转子整流器的故障状态 (Id过大,p 300
特征:
当重叠达到600、 强迫延时 换相角达到300时的电压电流波 形如右图所示。
如果负载电流继续增大, 重叠角又会大于600,但强迫延 时换相角会保持300不变。原因 是:即使前面两个管子换流未 换完,后面该导通的管子也会 承受正压而导通,这样,就会 出现共阴极管和共阳极管都在 换流,四个二极管同时导通---转子整流器短路的故障情况 。
三相异步电动机串级调速特征
三相异步电动机串级调速特征串级调速是指绕线式电动机转子回路中串入可调度的附加电势来改动电动机的转差,抵达调速的意图。
大有些转差功率被串入的附加电势所吸收,再运用发作附加的设备,把吸收的转差功率回来电网或改换能量加以运用。
依据转差功率吸收运用办法,串级调速可分为电机串级调速、机械串级调速及晶闸管串级调速办法,多选用晶闸管串级调速,其特征为: 1.可将调速进程中的转差损耗回馈到电网或出产机械上,功率较高; 2.设备容量与调速计划成正比,出资省,适用于调速计划在额外转速70%-90%的出产机械上;
3.调速设备缺点时能够切换至全速作业,防止停产;
4.晶闸管串级调速功率因数偏低,谐波影响较大;本办法适宜于风机、水泵及轧钢机、矿井行进机、揉捏机上运用。
1。
异步电动机的几种调速方法

异步电动机的几种调速方法本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March一、调速方法从异步电动机的转速关系式n=n1(1-S)=60(f1/P)(1-S)可见,要改变异步电动机的转速,可从下列三个方面着手:1.改变异步电动机定子绕组的极对数P,以改变定子旋转磁场的转速n1,即所谓变极调速(不能均匀调速)。
2.改变电动机所接电源的频率以改变n1,即所谓变频调速;3.改变电动机的转差率S。
其中,改变转差率S有很多种方法。
当负载的总制动转矩不变时,与它平衡的电磁转矩也跟着不变,于是,从电磁转矩参数表达式(略)可见,当频率f1和极对数P不变时,转差率S是定子端电压、定子电阻、漏抗等物理量的函数,因此,改变转差率S的方法有下列几种:(1)改变加与定子的端电压,为此需用调压器调压;2(2)改变定子电阻或漏抗,为此须在定子串联外加电阻或电抗器;(3)改变转子电阻,为此采用绕线式电动机,在转子回路串入外加电阻;(4)改变转子电抗,为此须在转子回路串入电抗或电容器。
(5)在转子回路中引入一个转差率f2=Sf1的外加电势,为此须利用另一台电机来供给所需的外加电势,该电机可与原来电动机共轴,或不共轴,这样将几台电机在电方面串联在一起以达到调速目的,称为串级调速。
串级调速可用一种可控硅调速来代替。
其基本原理为:先将异步电动机转子回路中的转差频率交流电流用半导体整流器整流为直流,再经过可控硅逆变器把直流变为交流,送回到交流电网中去。
这时逆变器的电压便相当于加到转子回路中的电势,控制逆变器的逆变角,可改变逆变器的电压,也即改变加于转子回路中的电势,从而实现调速的目的。
3从上分析,可见异步电动机的调速方法很多,下面介绍主要的三种,即变极调速、变频调速和改变转子电阻调速。
二、变极调速由于一般异步电动机正常运行时的转差率S都很小,电机的转速n=n1(1-S)决定于同步转速n1。
第十九章 异步电动机的调速
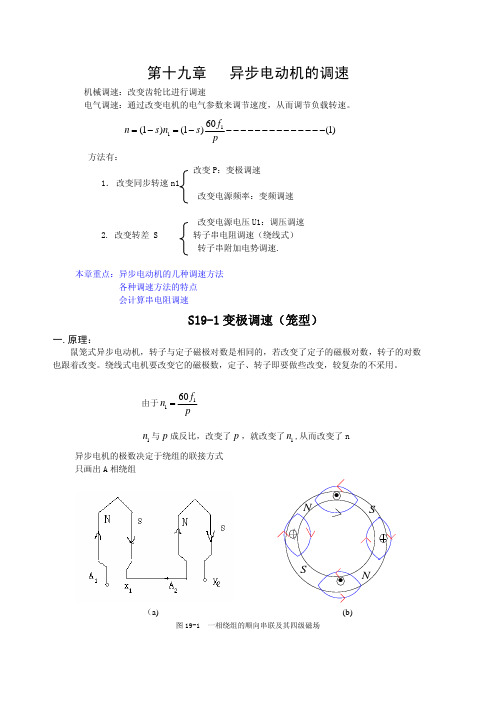
第十九章 异步电动机的调速机械调速:改变齿轮比进行调速电气调速:通过改变电机的电气参数来调节速度,从而调节负载转速。
1160(1)(1)(1)f n s n s p=−=−−−−−−−−−−−−−−− 方法有:改变P:变极调速1. 改变同步转速n1改变电源频率:变频调速改变电源电压U1:调压调速2. 改变转差 S 转子串电阻调速(绕线式)转子串附加电势调速.本章重点:异步电动机的几种调速方法 各种调速方法的特点 会计算串电阻调速 S19-1变极调速(笼型)一.原理:鼠笼式异步电动机,转子与定子磁极对数是相同的,若改变了定子的磁极对数,转子的对数也跟着改变。
绕线式电机要改变它的磁极数,定子、转子即要做些改变,较复杂的不采用。
由于1160f n p=1n 与成反比,改变了,就改变了,从而改变了np p 1n 异步电机的极数决定于绕组的联接方式 只画出A 相绕组(a) (b)图19-1 一相绕组的顺向串联及其四级磁场由定子进转子为正,N 极指向因此,正向串联,绕组产生的磁极是4极的。
那么三相绕组产生的磁极数仍是4极的。
1122,A X A X若把两伴相绕组分接方式改变一下,尾尾相连NS1p =图19-2 一相绕组的反向串联和反向并联结论:把每相绕组中的一半线圈的电流改变方向,即半相绕组反相,即电动机的极对数成倍变化。
也成倍变化,拖动的负载的转速也成倍变化。
1n由于绕线式异步电动机转子极对数不能自动随定子极对数变化,如果同时改变定、转子绕组极对数又比较麻烦,不能采用变极调速。
二.典型的变极路线 Y YY −能够实现上述变极原理的线路很多,下面介绍比较常用的两种接线方法。
1)Y-YY 接法Y 接法时:Y接法:每组中的两个极对数,同主转速半相绕组正向串联,P,n 1图19-3 Y-YY 接法变极电机绕组的联结YY接法:半相绕组反向半联,相对数为1pz ,同主转速为2n 1 定性分析变速F0与输出功率、转矩关系(设每半相绕组流过1N I )Y: =y P 3N U N I 1ηcos 1ϕ=9550y T ϕn P y≈95501n P r变极后YY:=yy P 3N U (2)N I 1ηcos 1ϕ=2y P yy T =955012n P yy ≈95501n P y =y TY-YY 立极调速属恒转矩调速方式2) ∆△-YY 接法∆半相绕组正相串联 半相绕组反向并联极对数 p 极对数 P/2 同主转速 n 1 同主转速2n 1图19-4 Δ-YY 接法变极电机绕组的联结Δ: =ΔP 3N U (31I )ηcos 1ϕ ; =9550ΔT 1n P ΔYY: =yy P 3N U (2)1I ηcos 1ϕ=ΔP 32≈1.55ΔP =9550yy T 12n P yy =95501232n P Δyy T =0.577ΔT因此:∆△-YY 变极调速既非恒转速调速方式也非恒功率调速方式,但较接近恒功率调速方式。
异步电动机的几种调速方法 ——转子回路串电阻调速
• 可见这种调速方法很不经济,降低转速所 减少的输出功率全部消耗于调速电阻的铜 耗上。另一缺点是转子加电阻后电动机的 机械特性变软,即负载变化时转速将发生 显著变化。
• 由此可见在转子回路串电阻调速存在很多 缺点,但由于比较简单,又可平滑调速, 在中小容量的绕线式电动机还是用得不少, 例如交流电源的桥式起重机几乎都用到这 种方法调速。
• 在变阻器的电阻增加最初瞬间,电动机的 的转速还来不及改变,因此转子电流减小, 相应地电磁转矩也减小,电动机的转速开 始下降,而转子的电势开始增加,随之转 子电流又回加到与其 对应的电磁转矩和总负载转矩互相平衡为 止,这时电动机在一个较低转速下稳定运 行。
• 当转子回路串入调速电阻时,若电动机总 负载转矩保持不变,电动机从一个运行点 到另一个运行点,相应地转差率从S1增加 到S2,转速则从n1(1-S1)降到n1(1-S2)。 增加调速电阻,转速便越下降。
• 从转子回路串电阻调速曲线图(略)可见 在一定的调速电阻变化范围内,调速范围 的大小随负载的轻重而变化;在空载下调 速,则调速范围甚小,实际上达不到调速 的目的。
• 此外,在恒转矩调速时,从电磁转矩参数 表达式(略)可知,恒转矩调速时转差率s 将随转子回路总电阻成正比例变化,总电 阻增加一倍,则转差率也增加一倍,于是 根据等效电路可见:恒转矩调速时,定、 转子电流、输入功率、气隙磁场和电磁功 率皆不变,而与转子回路串入电阻的大小 无关。于是,如果把转速调得愈低,即转 差率愈大,就需要在转子回路串入愈大的 电阻,随之转子铜耗就愈大,电动机效率 就愈低。
电动机保护器 www.cx-jl
异步电动机的几种调速方法 — —转子回路串电阻调速
• 在转子回路串一变阻器调速只适用于绕线 式异步电动机。调速时的接线图和起动时 的一样,所不同的是:一般起动变阻器都 是短时工作的,而调速用的变阻器应为长 期工作的。
三相异步电动机的变频调速方法(精)

三相异步电动机的变频调速方法一、串级调速方法串级调速是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,达到调速的目的。
大部分转差功率被串入的附加电势所吸收,再利用产生附加的装置,把吸收的转差功率返回电网或转换能量加以利用。
根据转差功率吸收利用方式,串级调速可分为电机串级调速、机械串级调速及晶闸管串级调速形式,多采用晶闸管串级调速,其特点为:1、可将调速过程中的转差损耗回馈到电网或生产机械上,效率较高;2、装置容量与调速范围成正比,投资省,适用于调速范围在额定转速 70%-90%的生产机械上;3、调速装置故障时可以切换至全速运行,避免停产;4、晶闸管串级调速功率因数偏低,谐波影响较大。
本方法适合于风机、水泵及轧钢机、矿井提升机、挤压机上使用。
四、绕线式电动机转子串电阻调速方法绕线式异步电动机转子串入附加电阻,使电动机的转差率加大,电动机在较低的转速下运行。
串入的电阻越大,电动机的转速越低。
此方法设备简单,控制方便,但转差功率以发热的形式消耗在电阻上。
属有级调速,机械特性较软。
二、变极对数调速方法这种调速方法是用改变定子绕组的接线方式来改变笼型电动机定子极对数达到调速目的,特点如下:1、具有较硬的机械特性,稳定性良好;2、无转差损耗,效率高;3、接线简单、控制方便、价格低;4、有级调速,级差较大,不能获得平滑调速;5、可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。
本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。
三、变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。
变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。
其特点:1、效率高,调速过程中没有附加损耗;2、应用范围广,可用于笼型异步电动机;3、调速范围大,特性硬,精度高;4、技术复杂,造价高,维护检修困难。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
装置回馈给电网。
2016年3月31日星期四
2. 低于同步转速的回馈制动运行状态 0<s<l,Te<0,则
Pem Te0 0
PM (1 s) Pem 0
Ps s Pem 0
说明电动机从轴上向转子上输入的机械功率PM与从电网通过产生 E f 装置输入的转差功率Ps之和,都变为电磁功率Pem,并通过电动机 定子回馈给电网。
I2
sE 20 R2 ( sX 20 ) 2
2
E 20 ―s=1时转子开路相电动势
X 20 ―s=1时转子绕组的相漏抗
2016年3月31日星期四
将绕线异步电动机的转子电路中串入交流附加电势 E f a. 如串入的附加电势 E f 与转子感生电势 sE20 方向相反,频率相同
* 这种向下调速的情况成为向低于同步速方 向的串级调速。
2016年3月31日星期四
4. 高于同步转速的回馈制动运行状态 s<0,Te<0。则
Pem Te0 0 PM (1 s) Pem 0 Ps s Pem 0
说明电动机从轴上吸收机械功率PM,一部分变为电磁功率Pem , 通过定子回馈给电网;另一部分变为转差功率Ps,通过产生 E f 装置回馈给电网。
b. 如串入的附加电势 E f 方向相同,频率相同
与转子感生电势 sE20
* 这种向上调速的情况称为向高于同步 速方向的串级调速。
2016年3月31日星期四
向低于同步速方向的串级调速
串附加电动势之前:电机匀速转动,I2,Te=Tl; 串附加电动势之后:
I2 '
sE20 E f R2 jsX 20
2016年3月31日星期四
1.转子整流器的第一工作状态
(Id较小,
600 的情况
)
特征:转子电流较小,整流后直流电流Id也 较小; 二极管整流器换相迅速,两个二极管之 间的换流重叠角ɼ较小。 重叠角 ɼ 随转子电流或Id的增大而增大, 第一工作状态的ɼ小于等于600。
2016年3月31日星期四源自2016年3月31日星期四
可见,三相交流附加电势的取得在实际中十分困难。
超同步串级调速系统系统装置复杂,费用高。
实用的串级调速系统,一般采用低同步串级调速: 将转子电路接整流电路; 在直流回路中串入直流附加电动势; 通过调节直流附加电势的大小来调速的控制方案。
2016年3月31日星期四
主要介绍低同步串级调速系统的基本类型。
分析前提条件:
(1) 假设直流滤波电感足够大,转子整流器输出的直流电流平直。 (2) 整流二极管没有管压降。 (3) 忽略电动机内阻对二极管换相的影响。
2016年3月31日星期四
分析注意事项:
异步电机转子整流电路的工作与一般具有整流变压器的整流电路的 工作极为相似,因此可以引用电力电子整流电路分析中已有的一些结 论,但是要看到它们两者之间存在着差异,主要是: ①转子绕组感应电动势E2的幅值与频率都是转差率s的函数; ②折算到转子侧的漏抗值也是转差率s的函数; ③由于异步电机折算到转子侧的漏抗值比整流变压器的要大,换相 重叠现象严重,转子整流器会出现“强迫延迟导通”现象。
2016年3月31日星期四
绕线型异步电动机的转子
2016年3月31日星期四
绕线型异步电动机的转子
集电环
2016年3月31日星期四
三相绕线型异步电动机示意图
转子三相绕组接成 Y 形
短接或 外接对称电阻等
2016年3月31日星期四
一. 串级调速的原理
转子串电阻调速分析 我们知道,对于绕线转子异步电动机,可以在其转子回路串入电阻来 减小电流,增大转差率,从而改变转速。这种方法就是转子串电阻调速方 法。 优点:简单方便 主要缺点: 1.低效率 R2F↑→I2↓→Te↓→n↓实现调速;但 n↓→s↑→转差功率Ps=s.Pem↑, 大量转差功率将在转子所串电阻上变成热量被消耗掉,因此不适合对大容 量电机降速,对小容量电机也因效率太低而不适宜长期运行。 转子串电阻调速方法的能量关系如图所示。
第一工作状态的边界 600 时电压、电流波形
由整流电路计算,得第一工作状 态下的重叠角 计算公式:
cos 1
式中,
2 X D0 6 E20
Id
Id―整流电流平均值; E20 ―转子开路时的相电动势 有效值; XD0 ―折算到转子侧的每相漏 抗(s=l时)。 可见,E20和XD0确定时,Id 越大,γ越大,当 I d 6 E20 时,γ 4 X D0 =60o。
2016年3月31日星期四
将转差率s换成速度n,得串级调速系统的调速特性:
绕线转子异步电动机串级调速系统
一、 串级调速的原理与基本类型
二、绕线转子异步电动机串级调速时的机械特性
三、 串级调速系统的效率和功率因数 四、 双闭环控制的串级调速系统
五、 串级调速系统的应用
2016年3月31日星期四
串级调速的原理与基本类型
一.串级调速的原理
二.串级调速的基本运行状态及功率关系 三.串级调速系统的基本类型
二.串级调速的基本运行状态及功率关系
在转子侧引入一个可控的附加电 动势,就可实现调速,这个调速 过程必然在转子侧形成功率的传 递。
串级调速系统基本运行状态: 四种
在调节前后,转子电阻消耗功率 不变,但转差率s改变,即转差功 率改变;
功率的流向要么是从转子侧传输 到与之相连的交流网或外电路中, 要么是从外面吸收功率到转子中 来。
I 2 ' I 2 Te ' Te n
s s ' n s I 2 ' I 2 ' I 2 n' T ' T e e
电机在转速n′处实现平衡,转速调为n ′ 。
2016年3月31日星期四
向高于同步速方向的串级调速
串附加电动势之前:电机匀速转动,I2,Te=Tl; 串附加电动势之后:
2016年3月31日星期四
对于电气串级调速系统,如忽略损耗,则电机轴上输出的转矩 为:
(1 s) Pd Pd Te (1 s) 0 0 Pm
常数
结论:电气串级调速系统具有近似恒转矩的机械特性。
对于机械串级调速系统,如忽略损耗,则电机轴上输出的机械 功率为:
(1 s) Pd sPd Pd 常数
2016年3月31日星期四
3. 高于同步转速的电动运行状态 s<0,Te>0。则
Pem Te0 0 PM (1 s) Pem 0
Ps s Pem 0
说明从电网向电动机定子输入电磁功率Pem,同时从电网通过产生 E f 装置向电动机转子输入转差功率Ps。电动机把定子和转子同时吸收的 电功率变为机械功率PM从轴上输出。
2016年3月31日星期四
电气串级调速系统
由晶闸管有源逆变电路作为可控直流电源, 通过控制逆变角控制转子转速,其交流侧通过逆变变压器接电网。 呈现恒转矩机械特性。
2016年3月31日星期四
机械串级调速系统
用直流电动机作为可控直流电源, 通过控制直流电动机的励磁控制转子转速。 所吸收转差功率可以通过直流电动机与绕线电动机 的轴间直连将转差功率直接反馈给绕线电动机。 具有恒功率调速的特性
问题的引入:
2016年3月31日星期四
*转速越低,转差越大,电 阻发热越多,效率越低。
2016年3月31日星期四
2.调速时,其机械特性随着转子回路附加电阻增加而变软,大大降低了调 速精度。 3.实际应用中,由于串入转子回路的附加电阻级数有限,无法实现平滑调速。
基本结论:
串入电阻越大,转速越低,转差就越大, 机械功率在电磁功率中所占的比率就越低,效率 越低。
问题:如何在改变转子电流的基础上,提高技术 性能和经济性能?
2016年3月31日星期四
串级调速的基本原理是什么?
基本思路: 1.转子串电阻调速是通过改变转子电流改变电磁转矩实现调速; 2.转子不串入附加电阻-----改为串入附加电动势同样可实现调速; 3.将调速引起的转差功率损耗,回馈回电网或电动机本身,既提高效率、 又实现变转差率调速。 4.该方法被称为绕线转子异步电动机的串级调速控制方案。 工作原理: 三相异步电动机的转子感应电压为: E 2 s E 20 转子电流为: 式中:
2016年3月31日星期四
2.转子整流器的第二工作状态 (Id较大, 600 不变,出现强迫延时换相角)
特征:
当重叠达到600,电流达到第一工作 状态最大电流(或一、二状态分界 电流Id1-2)以上,如果负载电流继 续增大,最初时重叠角会大于600, 但稳定以后,两个二极管的重叠会 均匀地保持600不变,但所有二极管 的换流都被迫从自然换流点向后延 迟一个角度 p 。 电流越大,这个强迫延时换相 角就越大,但有:
2016年3月31日星期四
二.串级调速系统的调速特性 (n或s与电流Id的关系式)
n或s与电流Id的关系式,需要从直流等效电路入手加以推导: 第一工作状态下,整流整流器-逆变器的直流回路等效电路如下:
2016年3月31日星期四
由直流回路等效电路,列出直流电压平衡方程:
于是,推得转差率与电流之间的关系式:
2016年3月31日星期四
低同步串级调速系统的机械特性
一.转子整流器的三种工作状态
二.串级调速系统的调速特性
三.串级调速系统的机械特性与最大转矩
2016年3月31日星期四
一.转子整流器的三种工作状态
低同步串级调速系统电力电子电路的核心部分是转子整流器和有源逆变 器,这两部分电路的整流或逆变器件的开关过程会受到负载电流的影响。 负载电流较小时换流速度较快,而负载电流较大时器件的换流速度较慢, 换流速度慢会导致输出电压的降低,如果换流速度过慢甚至会引起电路故障。 下面以转子整流器为例说明换流过程其整流输出电压的影响。