《航海学》船舶定位课件2_7船位误差理论共84页文档
航海学I船舶定位
⑤以风中航迹线为准顶风预配风压差 得
到真航向;
⑥推算起点和推算终点在计划航线上的长 度即为推算航程S;并进行正确标注。
❖ 练习题:
❖ 1 、 某 船 真 航 向 090º、 船 速 12 节 , 航
行海区有北风六级( 为4º)、北流3
节的影响,试作图求推算航迹向和推 算航速?
❖ 2、某船计划航迹向090º、船速12节,
图上标注 推算船位附近,用分数形式标明船位的时间和当时的计程仪读数 在计划航线上,标注计划航迹向、罗航向和罗经差(或陀罗航向和陀罗差)。
由于罗经差、计程仪改正率、风流压差,加之读取读数、操舵 不稳和海图作业等方面的误差,会导致航迹推算产生误差,随 着航行时间的推移,这种积累误差会达到相当程度。航迹绘算 的精度由以下两种精度决定:
❖ 熟练掌握各种航行环境下的航迹绘算方法及风流合 压差角的测定;
❖ 掌握航迹计算法和航迹推算精度的定性分析。 ❖ 重点:风流中的航迹推算的基本概念和方法及风流
合压差角的测定。 ❖ 难点:风流中的航迹绘算方法。
❖ 航迹推算的要求:
❖ 开始时间:在船舶驶出领航水域或港界,定速 航行后立即开始。推算起始点必须是准确的观 测船位。
愈小;平底船要比尖底船的 大; ❖ 5.船舶受风面积和船型:受风面积大,
亦大。
❖ 经过实测并以统计学方法可以得到如下
求风压差经验公式:
K
VW VL
2
sin QW
VW,VL——分别表示风速和船速(m/s);
QW——风舷角;
Kº——风压差系数,以度计。
上述公式仅适用于风压差值不超过10º~ 15º的 情况。
1. 向下风漂移的速度远小于风速
2. 方向也不一定与风向平行;
《航海学》船舶定位课件2_7船位误差理论
g
g
u g dn n
Ⅰ′ Ⅰ end
退出
上海海事大学航海教研室制作
二、航海上常用位置线的梯度
1.方位位置线梯度
2.距离位置线梯度 3.方位差位置线梯度 4.距离差位置线梯度
上海海事大学航海教研室制作
退出
1.方位位置线梯度
(1)岸测船方位位置线梯度 (2)船测岸方位位置线梯度
l
n
L的意义:它不是真值,但确是真值的最可能值——称L为真 值的最概率值(最或然值、最或是值)
end
上海海事大学航海教研室制作 退出
二、单一观测的标准差m
1.理论计算公式
m
2i n
n
2 .实用计算公式——白塞尔公式
m
式中:
VV
n 1
vi li L
Hale Waihona Puke end上海海事大学航海教研室制作 退出
三、随机误差的传播规律
1 .函数标准差的一般式
问题:1)量面积误差?2)航向误差?即函数误差?如何求 设有函数 Z f ( x, y,, t )
其中
x , y , , t
为独立的直接观测量,它们的标准差分别为 则函数Z的标准差 mZ
2 2 Z
end
上海海事大学航海教研室制作 退出
极限误差
极限误差——3m 意义:1)从误差角度:观测中超过3m的误差只有0.3%。 2)从被观测量角度:被观测量的实际值落在“观测值±3m” 内的概率有99.7%。 例如:有人测量桌子长度为99.8±0.4cm 说明实际桌子长度在99.8±1.2cm(98.6~101cm)内的可能 性有99.7%
航海学讲义之船位误差二
船 位 误 差误差的研究方向:① 定量研究,是测量学科和科研主要讨论的问题,即经一系列数据处理求出误差的具体值;② 定性研究,不必求出误差的具体值,在了解观测误差的条件下,根据误差理论提出的原则,采用相应的方法,使观测误差对观测结果的影响达到最小。
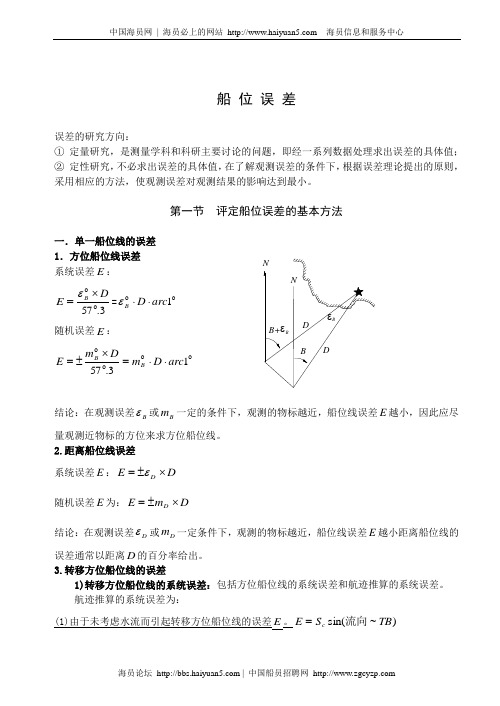
第一节 评定船位误差的基本方法一.单一船位线的误差 1.方位船位线误差 系统误差E :=E 3.57 DB⨯ε=1arc D B ⋅⋅ε随机误差E :13.57arc D m D m E B B ⋅⋅=⨯±=结论:在观测误差B ε或B m 一定的条件下,观测的物标越近,船位线误差E 越小,因此应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差系统误差E :D E D ⨯±=ε 随机误差E 为:D m E D ⨯±=结论:在观测误差D ε或D m 一定条件下,观测的物标越近,船位线误差E 越小距离船位线的误差通常以距离D 的百分率给出。
3.转移方位船位线的误差1)转移方位船位线的系统误差:包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差为:(1)由于未考虑水流而引起转移方位船位线的误差。
)~sin(TB S c 流向=结论:当转移船位线的方位TB 与流向平行时E =0,误差最小,垂直时,E =c S 误差最大。
移线的时间间隔越短,c S 越小,则E 越小,在航海实际工作中该项E 属于未定系统误差。
(2)由推算航向的误差C ε引起转移船位线的误差E :Q arc S Q S E c c cos 1cos 3.57εε==Q =TB -TC ,移线期间的航程为S 。
结论:当Q =90°时,误差E 最小。
(3)由推算航程的误差S ε引起转移船位线的误差EQ E s sin ε=结论:当Q =0°时,误差E 最小。
2)转移方位船位线的随机误差转移方位船位线的随机误差包括转移前船位线的标准差B m 和转移期间的推算误差ρ:22ρ+±=B m E4.距离差船位线误差距离差船位线的随机误差为:2csc 22csc 081.0γγd t m m E ∆∆±=±= t m ∆——时差的标准差(μs );d m ∆——距离差的标准差(′);γ——船对基线的张角。
航海学海图作业规定与要求航迹绘算航迹推算误差课件

推算航迹线——通过航迹推算得到的航迹线, 一般应与计划航线相一致。
实际航迹线简称航迹线(track)TR——船舶航 行时,实际运动轨迹航海在学海算图地航作迹业面推规算定上误与差要求的航迹投绘 影。
C、驾驶员了解船舶在海上运动轨迹的基本方法
D、以上都对
2、推算船位的起始点:
A、通常采用标准船位
B、可根据当时定位条件确定
C、必须是正确船位
D、以上都对
3、航迹推算在航行过程中:
A、在有GPS或陆标定位的水域可以中断
B、在狭水道可以中断,但应将中止点和复始点在海图上画出
并记入航海日志
C、不得无故中断
C、SG = SL * (1-ΔL)
D、SL = SG * (1-ΔL)
5、在无风无流情况下,关于推算航程以下正确的是:
A、推算航程SG = 计程仪航程SL B、SL = (L2-L1)*(1+ΔL)
C、以上都对
航海学海算图航作迹业推规算定误与差要求航D迹、绘 以上都不对
二、有风无流时的绘算
航海学海图作业规定与要求航迹绘 算航迹推算误差
D、B和C都正确
4、现实情况下:
A、在GPS定位条件好的海域可以不进行航迹推算
B、在GPS定位条件差的海域进行航迹推算
C、在整个航行过程中航海,学海航图迹作业推规定算与应要求连航迹续绘 不断,不得无故中断
D、A和B都对
算航迹推算误差ຫໍສະໝຸດ 思考练习5、海图作业标注时,计划航线上都应标注下列( )内容: 1、计划航迹向2、真航向3、罗航向4、罗经差 A、1~4 B、1、3、4 C、1、2、4 D、2~4
大连海事大学航海学2课件——天文船位误差

N A
2ψ
k
k
2ψ c
2.截点距离误差:由于截点不正确而产生的误差。
N A
k
k
k
2ψ
c
截点距离误差小于0´.1
3.船位线的曲率误差:在墨卡托海图上用恒向 线直线代替船位圆曲线所产生的误差;
N A
k
k
c
上述误差在一般情况(中纬海区)下均 可忽略。
只有在高纬海区、 天体高度较高、 截距较大、 天体接近东、西方向时 才考虑修正上述1、3项误差。
在大洋中,该误差可忽略不计;
在沿海、海湾特别是气温与水温的温差 相差很大时,可产生不可忽略的误差。
这就是为什么沿海天文定位不准确的原 因所在。
(2)蒙气差的误差
利用公式计算出的蒙气差与实际蒙气差 会产生一定的误差,并与气温、气压有 关。
当天体的高度低于15时会产生不可忽略 的误差。
当天体的高度大于15并小于30时,蒙 气差的误差约为0.2。
2.如果船位误差三角形较大,三天体分布的范围又在180°以内,按系 统误差三角形处理,观测船位在误差三角形之外,按随机误差三角形处 理观测船位在三角形之内,这时可取这两点连线的中点为观测船位。
3.当三天体分布范围在180°以上时,无论按系统误差还是按随机误差 处理观测船位均在误差三角形之内,特别是当三天体相互之间的方位差 角均为120°时,两种处理方法的结果是同一点(内切圆的圆心),该 点的可信赖程度最高。
p´ P P´
二、随机误差对观测船位的影响
船位误差四边形、船位误差椭圆、船位误差圆
根据国际海事(IMO)规定的《海上导航精度标准》,观 测船位采用95%不确定度,则
等精度95%误差圆的半径为:
R0.95=
航海学课件(完整版)

第一篇航海学地文航海航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显著的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。
航海学 项目二任务7、认识位置线与船位线
线,则其交点即为观测时刻的观测船位。
3、船位线:
EP
过位置线且靠近推算船位点的切线称之。船位线
位置线 ITR
任务7、认识位置线与船位线
二、位置线的各种形式
1、方位位置线line of position by bearing 1)岸测船
岸上测者从已知位置处对船舶进行方位观测所得的位置 线称为岸测船方位位置线。如图所示
船舶定位与导航 项目二、航迹推算与陆标定位 任务7、认识位置线与船位线
浙江交通职业技术学院 李德雄
任务7、认识位置线与船位线
一、名词 1、等值线: 1)定义:保持函数为常量的点的几何轨迹。 2)航海上的等值线定义:满足某一观测结果,且观测结果
相一致的各个点的连线。 例如:“真方位090°” TB090°
结论:
Pn
岸测船方位位置线形式 ——大圆弧
TB A B C
大圆方位线
任务7、认识位置线与船位线
2)船测岸
ቤተ መጻሕፍቲ ባይዱ
船上测者对已知位置的岸标进行方位观测所得的位置线
称为船测岸方位位置线。如图所示
Pn
结论: 船测岸方位位置线形式
A″
M
恒位线
A′ A
——恒位线
物标方位线
3)近距离时,
岸测船和船测岸位置线形式均为:由测者连向物标的射线。
TB045°。
0755
0800 0805
ITR
任务7、认识位置线与船位线
推论:(定位原理)
➢只有位于位置线上的测者才能对所观测的物标测得正
确的观测值。
➢反之,若测者通过观测,并根据观测值在海图上作出
符合观测结果的等值线(位置线),则测者在观测的
航海学航向、方位和舷角(课堂PPT)
CL
如:TB>360°,
NT
BL M
则:TB′= TB - 360º
TB
Q
TC
7
航向、方位和舷角关系
符号法则:
M
NT
CL
如:TB>360°
BL
则:TB′= TB - 360º
Q左
TC
如:TB<0° 则:TB′= TB + 360º
(END)TB源自8思考练习1、真航向是:
A、船舶航行的方向 B、船首尾线的方向
A、150° B、330° C、090° D、060°
5、某船真航向060°,该船右舷30°某物标的真方位为:
A、30° B、90° C、030° D、090°
6、某船真航向040°,测得某物标的真方位为320°,则该物标的
相对方位(舷角)为:
A、80° B、080° C、280° D、310°
9
3
真方位[True Bearing]:
方位线:在测者地面真地平平面上,测者
N 与物标的连线。
真方C位:以真北为基准顺时针 度量到物标方位线的角度,
TC
代号TB。范围:000°~360°,常
用圆周法表示。
TB
A M
4
舷角[Relative bearing]:航向线与物标方位线
间的夹角,代号Q。习惯上常用半圆法表示。
C、船首向
D、船舶航行时真北至船首向的夹角
2、舷角是:
A、船首线至方位线的夹角 B、物标的方向
C、真航向减去真方位
D、船舶海上看物标的方向
3、我船航向180°,某船位于我船右舷30°,若该船航向为
350°, 则我船位于该船舷角:
位置线及船位误差
• 这里需要指出的是随机误差既不能用上 述改正观测结果的方法来消除,也不能 用适当的观测方法来加以消除。只有通 过了解随机误差的性质,掌握它的传播 规律,并由此采取相应的措施,才能在 一定程度上削弱它的影响。 • 3.复合误差 • 复合误差(Composite error)又称综合 误差和完全误差,它是系统误差与随机 误差之和。
• 2.系统误差 • 固定不变的误差或者有规律变化的误差, 叫做系统误差(Systematic error),它 又称固定误差。 • 系统误差通常用下面两种方法去消除它: • (1)了解系统误差的规律,并将它求出 或测出来,然后从测量结果中加以改正 消除。 • (2)不直接求出该系统误差,而是采用 适当的测量方法和步骤,将它的影响消 除掉。
第二节 单一观测的标准差与误差传 播规律
• 随机误差的标准差是衡量观测精度 (Accuracy)的标准。 • 一、单一观测的标准差 • 1.观测值的算术平均值 • 随着观测次数的增加,观测值的算术平均 值L将趋近于被测理的真值X。因此,可以 认为算术平均值L是真值X的最或然值 (Probablest value)。
• 4.距离差位置线:船上测者若对岸上已知坐 标的两个物标(例如台站)进行距离差的测量时, 则距离差位置线是以两物标(台站)为焦点的双 曲线(图),在该双曲线上任一点至两焦点的距 离差值均为观测所得的常数。
• 如果不在测者附近的小范围内研究位置 线,则不应把地面视作平面,而应将地 球当作圆球体更为精确,此时这四种位 置线在球面上和在海图上的形状就比较 复杂。
航海观测误差和船位误差理论基论
• 任何一种测量或观测,都不可避免地存在 误差,绝对正确的测量是不存在的。因此, 驾驶员必须了解误差的性质、传播规律以 及对它们的科学处理方法,以便对推算船 位和观测船位的精度做出准确的估计,同 时采取一些提高改善船位精度的措施,确 保船舶航行的安全。
船位误差的分析方法讲课文档
➢ 船上的测者观测灯塔 TB=310 °。求船舶位 置线
➢ 这是由船上的测者观
测物标M的TB得到的
位置线
➢ 在海图上从物标M按 TB的反方向画出方位
线(如图) 。
Øend
M
TB±180° =310°-180 °
NT TB=310°
第二十七页,共78页。
2)近距离岸测船方位位置线
NT
➢ 物标M处的测者观测船
横向误m差—横m—向横真向和5船m7纵位T.C向3 S误L差m纵向分别为:
➢
mTC
m纵向mLSL
推算船位标准差ρ为:
m横 2 向m纵 2 向
第十一页,共78页。
end
一、无风流的航迹推算误差
1.推算航向的误差
➢ 真航向有误差 mc
➢例m引c:=起1T°2时,刻SL推=1算00船′ 位的BC横=B向E=误S差57L ·为.m 3cBC(BE)
TB=131°
舶得TB=131° 。求船
M
舶位置线
➢ 这是由物标M处的测者 观测船舶的TB得到的船 舶 位 置 线 —— 在 海 图 上 从物标M按TB画出方位
线 (如图) 。
海图上近距离方位位置线的形式:TB(大圆方位)近似
为恒向线方位,方位位置线是恒向线——直线。
end
第二十八页,共78页。
3)远距离方位位置线
船位误差的分析方法
第一页,共78页。
二、观测误差的分类及处理
➢ 观测误差按其性质可分为系统误差、随机误差和粗差。 ➢ 1.粗差( Gross error)
➢ 性质:可避免,不允许存在。
➢ 处理方法:一般可用检验或重复观测的方法来发现和消除粗差。在对观 测结果的数据处理过程中应将含有粗差的观测结果剔除。