运筹学第五
第5章 运输模型

二、表式运输模型
见教材P119 表5——2 见教材P119 2
三、LP式运输模型的3种形式 LP式运输模型的3 式运输模型的
产销平衡
产销不平衡(产大于销、产小于销) 产销不平衡(产大于销、产小于销)
产销平衡
min ω = ∑ ∑ cij xij
i =1 j =1 m n
n ∑ xij = ai j =1 m s.t .∑ xij =b j i =1 xij ≥ 0(i = 1,2,L , m; j = 1,2,L , n )
销地 产地 A1 A2 A3 销量
B1 6 7 3 2
B2 3 5 2 3
B3 2 8 9 1
B4 5 4 7 4
产量
5 2 3
解:建立该运输问题的LP模型 建立该运输问题的LP模型 LP
(1)决策变量: 设 xij为从产地 Ai到销地 B j的数量(吨) ( 2)目标函数: min ω = 6 x11 + 3 x12 + 2 x13 + 5 x14 + 7 x21 + 5 x22 + 8 x23 + 4 x24 + 3 x31 + 2 x32 + 9, 表上作业法首先需要一种作业表,一般称 产销平衡及运价表。 为产销平衡及运价表。
产销平衡及运价表与前面所讲的表式运输 模型的区别在哪? 模型的区别在哪?
表上作业法的基本思想
表上作业法类似于单纯形法( 表上作业法类似于单纯形法(基本可行解 之间的转换), ),即先找出一个初始基本可 之间的转换),即先找出一个初始基本可 行解,称为初始方案 初始方案; 行解,称为初始方案;然后按照一定的准 则来检验这个方案是否最优;如果不是, 则来检验这个方案是否最优;如果不是, 则按照一定的方法加以调整改进, 则按照一定的方法加以调整改进,直到求 出最优方案为止。 出最优方案为止。
运筹学第五章 整数规划ppt课件
第二步:确定A的最优目标函数值z*的上下界,其上界即为 z ,再用观察法
找到A的一个整数可行解,求其目标函数值作为z*的下界,记为z。
第三步:判断 z 是否等于z 。若相等,则整数规划最优解即为其目标函
数值等于z的A的那个整数可行解;否则进行第四步。
2020/3/2
11
•割平面法,即通过添加约束条件,逐步切割可行区域的 边角余料,让其整数解逐步的露到边界或顶点上来,只要 整数解能曝露到顶点上来,则就可以利用单纯形法求出来。
•关键是通过添加什么样的约束条件,既能让整数解往边 界露,同时又不要切去整数解,这个条件就是Gomory约束 条件。 •Gomory约束只是割去线性规划可行域的一部分,保留了 全部整数解。
2020/3/2
7
7
第二节 割平面法
2x1 2x2 11
13/4,5/2
松弛问题 x1+x2≤5 第二次切割
2020/3/2
第一次切割 4,1
8
设纯整数规划
n
m a x Z c j x j j 1
s
.t
.
n j 1
aij x j
bi
x
j
0且
为
整
数
,
j
1,L
引入约束 xi ≤ M yi ,i =1,2,3,M充分大,以保证yi=0 xi=0 这样我们可建立如下的数学模型:
Max z = 4x1 + 5x2 + 6x3 - 100y1 - 150y2 - 200y3 s.t. 2x1 + 4x2 + 8x3 ≤ 500
运筹学第五版习题答案

运筹学第五版习题答案运筹学是一门研究如何优化决策的学科,它涉及到数学、统计学和计算机科学等多个领域。
运筹学的应用范围非常广泛,包括生产调度、物流管理、供应链优化等等。
而《运筹学第五版》是一本经典的教材,它提供了大量的习题供学生练习和巩固所学知识。
本文将为大家提供《运筹学第五版》习题的答案,希望对学习者有所帮助。
第一章:引论1. 运筹学的定义是什么?运筹学是一门研究如何优化决策的学科,它利用数学和统计学的方法来解决实际问题。
2. 运筹学的应用领域有哪些?运筹学的应用领域包括生产调度、物流管理、供应链优化、金融风险管理等。
3. 运筹学方法的基本步骤是什么?运筹学方法的基本步骤包括问题建模、模型求解、解的验证和实施。
第二章:线性规划模型1. 什么是线性规划模型?线性规划模型是一种数学模型,它描述了一种目标函数和一组线性约束条件下的最优化问题。
2. 如何确定线性规划模型的最优解?线性规划模型的最优解可以通过线性规划算法来求解,如单纯形法、内点法等。
3. 什么是对偶问题?对偶问题是与原始线性规划模型相对应的另一个线性规划模型,它可以用来计算原始问题的下界。
第三章:网络优化模型1. 什么是网络优化模型?网络优化模型是一种描述网络结构的数学模型,它可以用来解决最短路径、最小生成树、最大流等问题。
2. 最短路径问题如何求解?最短路径问题可以通过迪杰斯特拉算法或弗洛伊德算法来求解。
3. 最大流问题如何求解?最大流问题可以通过Ford-Fulkerson算法或Edmonds-Karp算法来求解。
第四章:整数规划模型1. 什么是整数规划模型?整数规划模型是一种线性规划模型的扩展,它要求决策变量取整数值。
2. 整数规划问题如何求解?整数规划问题可以通过分支定界法或割平面法来求解。
3. 什么是混合整数规划模型?混合整数规划模型是一种整数规划模型的扩展,它要求部分决策变量取整数值,部分决策变量取连续值。
第五章:动态规划模型1. 什么是动态规划模型?动态规划模型是一种描述决策过程的数学模型,它将问题划分为一系列的阶段,并通过递推关系求解最优解。
运筹学第五章_目标规划

第一节目标规划实例与模型
看起来有 点繁~ 有点 ‘烦’… … …★
因此其目标规划的数学模型: minz=p1d1++p2(d2-+d2+)+p3d3s.t 2x1+x2≤11 x1-x2+d1--d1+=0 x1+2x2+d2--d2+=10 8x1+10x2+d3--d3+=56 x1,x2≥0,di-,di+≥0,i=1,2,3
第一节目标规划实例与模型
(5)目标函数—准则函数 目标函数是由各目标约束的正负偏差变量及其相应 的优先级、权因子构成的函数,且对这个函数求极小值, 其中不包含决策变量xi.因为决策者的愿望总是希望尽可能 缩小偏差,使目标尽可能达到理想值,因此目标函数总是 极小化。有三种基本形式:
第一节目标规划实例与模型
第一节目标规划实例与模型
(4)优先级与权因子 多个目标之间有主次缓急之分,凡要求首先达到的目 标,赋于优先级p1,要求第2位达到的目标赋于优先级 p2,…设共有k0个优先级则规定 p1>>p2>>p3……Pk0>0 P1优先级远远高于p2,p3,只有当p1级完成优化后,再考 虑p2,p3。反之p2在优化时不能破坏p1级的优先值,p3级 在优化时不能破坏p1,p2已达到的优值 由于绝对约束是必须满足的约束,因此与绝对约束相 应的目标函数总是放在p1级
第一节目标规划实例与模型
该问题的决策目标是: (1)总利润最大; (2)尽可能少加工; (3)尽可能多销售电扇; (4)生产数量不能超过预销售数量。 (5)绝对目标约束。所谓绝对目标约束就是必须要严格 满足的约束。绝对目标约束是最高优先级,在考虑较低 优先级的目标之前它们必须首先得到满足。
运筹学第5章 单纯形法

0 0 1
在第一次找可行基时,所找到的基或为单位矩阵或为由单位矩阵的 各列向量所组成,称之为初始可行基,其相应的基本可行解叫初始基 本可行解。如果找不到单位矩阵或由单位矩阵的各列向量组成的基作 为初始可行基,我们将构造初始可行基,具体做法在以后详细讲述。
8Leabharlann §1 单纯形法的基本思路和原理
二、 最优性检验 所谓最优性检验就是判断已求得的基本可行解是否是最优解。
5
§1 单纯形法的基本思路和原理
线性规划解之间的关系:
1.可行解与最优解: 最优解一定是可行解,但可行解不一定是最优解。
2. 可行解与基本解: 基本解不一定是可行解,可行解也不一定是基本解。
3. 可行解与基本可行解: 基本可行解一定是可行解,但可行解不一定是基本可行解。
4. 基本解与基本可行解: 基本可行解一定是基本解, 但基本解不一定是基本可行解。
9
§1 单纯形法的基本思路和原理
2.最优解判别定理
对于求最大目标函数的问题中,对于某个基本可行解,如
果所有检验数 j≤0,则这个基本可行解是最优解。 下面我
们用通俗的说法来解释最优解判别定理。设用非基变量表示
的目标函数为: z z0 j xj jJ 由于所有的xj的取值范围为大于等于零,当所有的 j都小
由线性代数的知识知道,如果我们在约束方程组系数矩阵中找
到一个基,令这个基的非基变量为零,再求解这个m元线性方程组就
可得到唯一的解了,这个解我们称之为线性规划的基本解。
在此例中我们不妨找到
1 1 0 B3 1 0 0
为A的一个基,令这个基的非
1 0 1
基变量x1,s2为零。这时约束方程就变为基变量的约束方程:
第五章 单 纯 形 法
《运筹学》 第五章习题及 答案
《运筹学》第五章习题1.思考题(1)试述动态规划的“最优化原理”及它同动态规划基本方程之间的关系。
(2)动态规划的阶段如何划分?(3)试述用动态规划求解最短路问题的方法和步骤。
(4)试解释状态、决策、策略、最优策略、状态转移方程、指标函数、最优值函数、边界函数等概念。
(5)试述建立动态规划模型的基本方法。
(6)试述动态规划方法的基本思想、动态规划的基本方程的结构及正确写出动态规划基本方程的关键步骤。
2.判断下列说法是否正确(1)动态规划分为线性动态规划和非线性动态规划。
(2)动态规划只是用来解决和时间有关的问题。
(3)对于一个动态规划问题,应用顺推法和逆推法可能会得到不同的最优解。
(4)在用动态规划的解题时,定义状态时应保证各个阶段中所做的决策的相互独立性。
(5)在动态规划模型中,问题的阶段等于问题的子问题的数目。
(6)动态规划计算中的“维数障碍”,主要是由于问题中阶段数的急剧增加而引起的。
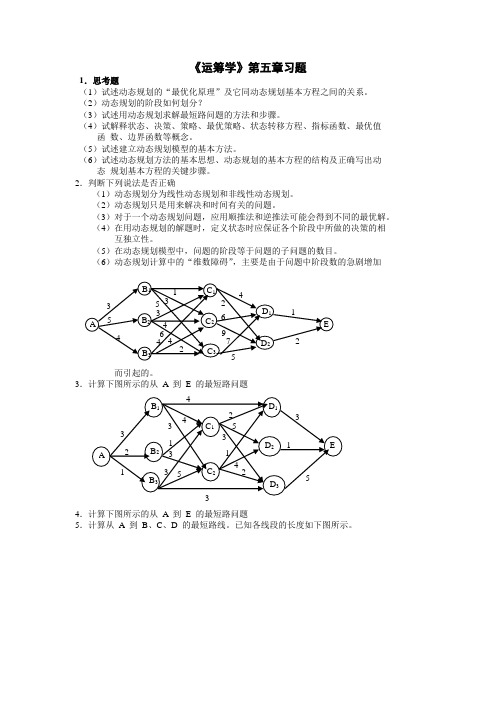
3.计算下图所示的从A 到E 的最短路问题4.计算下图所示的从A 到E 的最短路问题5.计算从A 到B、C、D 的最短路线。
已知各线段的长度如下图所示。
6.设某油田要向一炼油厂用管道供应油料,管道铺设途中要经过八个城镇,各城镇间的路程如下图所示,选择怎样的路线铺设,才使总路程最短?7.用动态规划求解下列各题(1).222211295max x x x x z -+-=;⎩⎨⎧≥≤+0,52121x x x x ;(2).33221max x x x z =⎩⎨⎧≥≤++0,,6321321x x x x x x ;8.某人外出旅游,需将3种物品装入背包,但背包重量有限制,总重量不超过10千克。
物品重量及其价值等数据见下表。
试问每种物品装多少件,使整个 背包的价值最大?913 千克。
物品重量及其价值的关系如表所示。
试问如何装这些物品,使整个背包 价值最大?10 量和相应单位价值如下表所示,应如何装载可使总价值最大?303011 底交货量,该厂的生产能力为每月600件,该厂仓库的存货能力为300件,又 每生产100件产品的费用为1000元。
《运筹学》第5版课后习题解析
运筹学第5版课后习题解析1. 引言运筹学是一门关于决策问题优化的学科,在管理科学和工程管理中有着广泛的应用。
本文将对《运筹学》第5版课后习题进行解析,以帮助读者更好地理解并掌握相关知识。
2. 第一章优化模型2.1 习题1习题描述一个客运航班需要从A地到B地,航班规定必须在指定时间到达。
如果到达时间早于指定时间,将产生额外的费用。
如果晚于指定时间,将会影响乘客的行程。
请设计一个优化模型,以确定何时起飞,才能使总费用最小。
解析这是一个典型的优化问题,需要确定一个决策变量来表示起飞时间,然后设计一个目标函数来表示总费用。
同时,还需要考虑到约束条件,如航班的飞行时间和到达时间的限制。
解答决策变量:起飞时间t目标函数:minimize total_cost约束条件:t + flight_time <= arrival_time2.2 习题2习题描述某公司需要购买一批原材料,有多个供应商可供选择。
每个供应商的价格、质量和交货时间都不同,请设计一个模型来确定最佳的供应商选择策略。
解析这是一个供应链管理问题,需要考虑多个因素来确定最佳供应商选择策略。
可以将价格、质量和交货时间作为决策变量,并设计一个目标函数来衡量不同供应商的综合性能。
解答决策变量:价格、质量和交货时间目标函数:maximize performance约束条件:无3. 第二章线性规划3.1 习题1习题描述某家餐厅每天需要供应一种特定菜肴,且每天需要固定的成本。
现在需要决定每天制作多少份该菜肴,以最小化总成本。
已知每份菜肴的制作成本、售出价格和每天的需求量,请设计一个线性规划模型来解决该问题。
解析这是一个经典的生产管理问题,需要确定每天制作的菜肴数量,使得总成本最小。
可以将菜肴数量作为决策变量,并设计一个目标函数来衡量总成本。
解答决策变量:菜肴数量目标函数:minimize total_cost约束条件:菜肴数量 >= 需求量3.2 习题2习题描述某公司有多个生产车间,每个车间的产能和生产成本不同。
《运筹学》第五章汇总
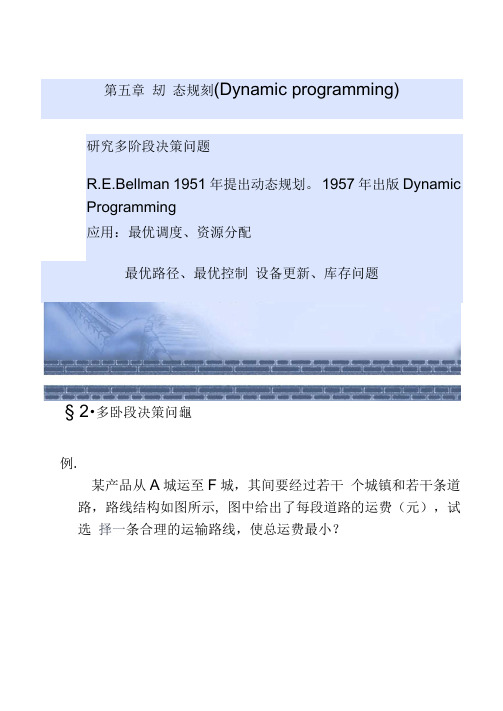
第五章刼态规刻(Dynamic programming) 研究多阶段决策问题R.E.Bellman 1951年提出动态规划。
1957年出版Dynamic Programming应用:最优调度、资源分配最优路径、最优控制设备更新、库存问题§ 2•多卧段决策问龜例.某产品从A城运至F城,其间要经过若干个城镇和若干条道路,路线结构如图所示, 图中给出了每段道路的运费(元),试选择一条合理的运输路线,使总运费最小?分析:力案①:A-Bl-Cl-El-F运费:26元方案②:A->B3->C3-E3-F 运费:22元方案③:A->B2->Cl->E2->F 运费:18元锻优方案:方案③§ 3•基本概念1 •阶段和阶段变量壬尸"〜阶段:过程的划分,包括时间、空间的划分,阶段数:n阶段变量:描述阶段的变量用£表示,&1,2,.•…,n2 •状态和状态变量状态:描述过程的必要信息。
状态应具仃无后效性:若给定了某阶段状态,则在这阶段以后过程的发展不受这阶段以前各阶段状态的影响.状态变量:描述状态的变量,用s表示。
»:表示第阶段的状态变量S A :表示第阶段状态变量篠合Sk e Sk如£[ = 4 = S],52 = B\ e S2 = {B[,82,83}53 = {C],C2,C3} , S4 = {Ex£"2,E3}S4+l={F} = F决策:决定(选择),从一个阶段的状态到下一个阶段状态的选择。
'决策变量:描述决策的变量,月U表示. u k=u k(s k)表示第邓介段处于》的决策变量D k = Dg表示第郊介段处于时决策变量的集合心wDg如》2(31)= {w2(^l)=G,W2(^I)=%2(B])= C] W Z)2(B1)4 •策略策略:决策按顺序构成的序列,用卩表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 六 次课 2学时本次课教学重点:单纯形法原理、基变换、最优检验 本次课教学难点:单纯形法原理、基变换、最优检验 本次课教学内容:第五章 单 纯 形 法§1 单纯形法的基本思路和原理一、 单纯形法的基本思路:从可行域中某一个顶点开始,判断此顶点是否是最优解,如不是,则再找另一个使得其目标函数值更优的顶点,称之为迭代,再判断此点是否是最优解。
直到找到一个顶点为其最优解,就是使得其目标函数值最优的解,或者能判断出线性规划问题无最优解为止。
通过第二章例1的求解来介绍单纯形法:在加上松弛变量之后我们可得到标准型如下: 目标函数: max 50x1+100x2 约束条件:x1+x2+s1≤300, 2x1+x2+s2≤400, x2+s3≤250.xj ≥0 (j=1,2),sj ≥0 (j=1,2,3) 它的系数矩阵⎪⎪⎪⎭⎫ ⎝⎛==100100101200111),,,,(54321p p p p p A其中pj 为系数矩阵A 第j 列的向量。
A 的秩为3,A 的秩m 小于此方程组的变量的个数n ,为了找到一个初始基本可行解,先介绍以下几个线性规划的基本概念。
二、基本概念基: 已知A 是约束条件的m ×n 系数矩阵,其秩为m 。
若B 是A 中m ×m 阶非奇异子矩阵(即可逆矩阵),则称B 是线性规划问题中的一个基。
基向量:基B 中的一列即称为一个基向量。
基B 中共有m 个基向量。
非基向量:在A 中除了基B 之外的一列则称之为基B 的非基向量。
基变量:与基向量pi 相应的变量xi 叫基变量,基变量有m 个。
非基变量:与非基向量pj 相应的变量xj 叫非基变量,非基变量有n -m 个。
由线性代数的知识知道,如果我们在约束方程组系数矩阵中找到一个基,令这个基的非基变量为零,再求解这个m 元线性方程组就可得到唯一的解了,这个解我们称之为线性规划的基本解。
在此例中我们不妨找到了 ⎪⎪⎪⎭⎫ ⎝⎛=1010010113B 为A 的一个基,令这个基的非基变量x 1,s2为零,这时约束方程就变为基变量的约束方程:x2+s1≤300,x2=400, x2+s3=250.求解得到此线性规划的一个基本解:x1=0,x2=400,s1=-100,s2=0,s3=-150由于在这个基本解中s1=-100,s3=-150,不满足该线性规划s1≥0,s3≥0的约束条件,显然不是此线性规划的可行解,一个基本解可以是可行解,也可以是非可行解,它们之间的主要区别在于其所有变量的解是否满足非负的条件。
基本可行解:我们把满足非负条件的一个基本解叫做基本可行解。
可行基:基本可行解,对应的基称为可行基。
一般来说判断一个基是否是可行基,只有在求出其基本解以后,当其基本解所有变量的解都是大于等于零,才能断定这个解是基本可行解,这个基是可行基。
那么我们能否在求解之前,就找到一个可行基呢?也就是说我们找到的一个基能保证在求解之后得到的解一定是基本可行解呢?由于在线性规划的标准型中要求bj 都大于等于零,如果我们能找到一个基是单位矩阵,或者说一个基是由单位矩阵的各列向量所组成(至于各列向量的前后顺序是无关紧要的事)例如,⎪⎪⎪⎭⎫⎝⎛010001100,那么显然所求得的基本解一定是基本可行解,这个单位矩阵或由单位矩阵各列向量组成的基一定是可行基。
实际上这个基本可行解中的各个变量或等于某个bj 或等于零。
在本例题中我们就找到了一个基是单位矩阵:⎪⎪⎪⎭⎫ ⎝⎛=1000100012B初始可行基:在第一次找可行基时,所找到的基或为单位矩阵或为由单位矩阵的各列向量所组成,称之为初始可行基。
初始基本可行解:初始可行基相应的基本可行解叫初始基本可行解。
如果找不到单位矩阵或由单位矩阵的各列向量组成的基作为初始可行基,我们将构造初始可行基,具体做法在以后详细讲述。
三、 最优性检验所谓最优性检验就是判断已求得的基本可行解是否是最优解。
1. 最优性检验的依据——检验数j σ一般来说目标函数中既包括基变量,又包括非基变量。
现在我们要求只用非基变量来表示目标函数,这只要在约束等式中通过移项等处理就可以用非基变量来表示基变量,然后用非基变量的表示式代替目标函数中基变量,这样目标函数中只含有非基变量了,或者说目标函数中基变量的系数都为零了。
此时目标函数中所有变量的系数即为各变量的检验数,把变 量i x 的检验数记为i σ。
显然所有基变量的检验数必为零。
在本例题中目标函数为2110050x x +。
由于初始可行解中21,x x 为非基变量,所以此目标函数已经用非基变量表示了,不需要再代换出基变量了。
这样我们可知0,0,0,100,5054321=====σσσσσ2.最优解判别定理对于求最大目标函数的问题中,对于某个基本可行解,如果所有检验数0≤j σ,则这个基本可行解是最优解。
下面我们用通俗的说法来解释最优解判别定理。
设用非基变量表示的目标函数为如下形式由于所有的xj 的取值范围为大于等于零,当所有的0≤j σ时,可知 0≤∑∈Jj j jx σ,要使z 的值最大,显然∑∈Jj j jx σ只有为零。
我们把这些j x 取为非基变量(即令这些j x 的值为零),所求得的基本可行解就使目标函数值最大为0z 。
**对于求目标函数最小值的情况,只需把0≤j σ 改为 0≥j σ 。
四、 基变换 通过检验,我们知道这个初始基本可行解不是最优解。
下面介绍如何进行基变换找到一个新的可行基,具体的做法是从可行基中换一个列向量,得到一个新的可行基,使得求解得到的新的基本可行解,其目标函数值更优。
为了换基就要确定换入变量与换出变量。
1. 入基变量的确定从最优解判别定理知道,当某个σj >0时,非基变量xj 变为基变量不取零值可以使目标函数值增大,故我们要选基检验数大于0的非基变量换到基变量中去(称之为入基变量)。
若有两个以上的σj >0,则为了使目标函数增加得更大些,一般选其中的σj 最大者的非基变量为入基变量,在本例题中σ2=100是检验数中最大的正数,故选x2为入基变量。
2. 出基变量的确定在确定了x2为入基变量之后,我们要在原来的3个基变量s1,s2,s3中确定一个出基变量,也就是确定哪一个基变量变成非基变量呢?如果把s3作为出基变量,则新的基变量为x2,s1,s2,因为非基变量x1=s3=0, 我们也可以从下式:x2 +s1=300, x2+s2=400, x2=250,求出基本解:x1=0,x2=250,s1=50,s2=150,s3=0。
因为此解满足非负条件,是基本可行解,故s3可以确定为出基变量。
能否在求出基本解以前来确定出基变量呢?以下就来看在找出了初始基本可行解和确定了入基变量之后,怎么样的基变量可以确定为出基变量呢?或者说出基变量要具有什么条件呢?我们把确定出基变量的方法概括如下:把已确定的入基变量在各约束方程中的正的系数除以其所在约束方程中的常数项的值,把其中最小比值所在的约束方程中的原基变量确定为0j jj Jz z x σ∈=+∑出基变量。
这样在下一步迭代的矩阵变换中可以确保新得到的bj 值都大于等于零。
在本例题中约束方程为在第二步中已经知道x2为入基变量,我们把各约束方程中x2的为正的系数除对应的常量,得其中33b a 的值最小,所以可以知道在原基变量中系数向量为 的基变量s3为出基变量,这样可知x2,s1,s2为基变量,x1,s3为非基变量。
令非基变量为零,得 x2+s1=300, x2+s2=400, x2=250. 求解得到新的基本可行解x1=0,x2=250,s1=50,s2=150. 这时目标函数值为50x1+100x2=50×0+100×250=25000。
显然比初始基本可行解x1=0,x2=0,s1=300,s3=250时的目标函数值为0要好得多。
下面我们再进行检验其最优性,如果不是最优解还要继续进行基变换,直至找到最优解,或者能够判断出线性规划无最优解为止。
教学组织:1、课堂讲授、提问、设问2、结合线性代数知识,理解原理 作业布置: 1、P96.1,212112223300,2400,250.x x s x x s x s ++=++=+=312122232300400250300,400,250.111b b b a a a ======()30,0,1T e =第 七 次课 2学时本次课教学重点: 单纯形法表格形式迭代 本次课教学难点:出基变量和进基变量的确定、最优检验 本次课教学内容:第二节 单纯形法的表格形式 一、检验数j σ的表达式可行基为m 阶单位矩阵的线性规划模型如下(假设其系数矩阵的前m 列是单位矩阵):以下用 表示基变量,用 表示非基变量。
把第i 个约束方程移项,就可以用非基变量来表示基变量xi ,把以上的表达式带入目标函数,就有其中:上面假设x1,x2,…xm 是基变量,即第i 行约束方程的基变量正好是xi ,而经过迭代后,基将发生变化,计算zj 的式子也会发生变化。
如果迭代后的第i 行约束方程中的基变量为xBi ,与xBi 相应的目标函数系数为cBi ,系数列向量为 , 则 ()112211,111,122,112,2,11,max .,,,0.1,2,,n n m m n n m m n n m m m m m n n m j z c x c x c x x a x a x b x a x a x b x a x a x b x j n ++++++=++++++=+++=+++=≥=L L L L L L L L L L L L L L L L L ()1,2,,i x i m =L ()1,2,,j x j m m n =++L (),11,22,1.1,2,,i i i m m i m m i n nni ij j j m x b a x a x a x b a x i m++++=+=----=-=∑L L ()1122110011m nn n i i j ji j m n nj j j j j j m j m z c x c x c x c x c x z c z x z x σ==+=+=+=+++=+=+-=+∑∑∑∑L ()()12112212112,,,,,,j m j j i ij j j m mj mi mj m j a a z c a c a c a c a c c c a c c c p =⎛⎫ ⎪ ⎪==+++= ⎪ ⎪ ⎪⎝⎭=∑L L M L 01,;mi i j j j i z c b c z σ===-∑()1,2,,j p j n '=L ()()1,,,j B Bm j B j z c c p c p ''==L其中,(cB)是由第1列第m行各约束方程中的基变量相应的目标函数依次组成的有序行向量。