msp430控制步进电机实验报告
msp430实验报告

msp430实验报告msp430实验报告引言:msp430是一种低功耗、高性能的微控制器,被广泛应用于嵌入式系统和物联网设备中。
本实验报告将介绍我对msp430微控制器进行的一系列实验,包括实验目的、实验过程、实验结果以及对实验的总结和展望。
实验目的:本次实验的主要目的是熟悉msp430微控制器的基本功能和使用方法,以及学习如何进行简单的控制程序设计。
通过实验,我希望能够掌握msp430的基本操作和编程技巧,并且能够运用所学知识解决实际问题。
实验过程:在实验开始之前,我首先对msp430微控制器进行了一些基本的了解。
我了解到,msp430具有低功耗、高性能和丰富的外设接口等特点,可以满足各种嵌入式系统的需求。
接着,我根据实验指导书的要求,准备好实验所需的硬件设备和软件工具。
第一部分实验是关于GPIO口的实验。
我按照实验指导书上的步骤,将msp430与LED灯连接起来,并编写了一个简单的程序,实现了对LED灯的控制。
通过这个实验,我学会了如何配置GPIO口和编写简单的控制程序。
第二部分实验是关于定时器的实验。
我学习了如何配置msp430的定时器,并编写了一个简单的程序,实现了定时闪烁LED灯的功能。
通过这个实验,我深入了解了定时器的工作原理和编程方法。
第三部分实验是关于ADC的实验。
我学习了如何配置msp430的ADC模块,并编写了一个简单的程序,实现了对外部模拟信号的采样和转换。
通过这个实验,我了解了ADC的基本原理和使用方法。
实验结果:通过一系列实验,我成功地掌握了msp430微控制器的基本功能和使用方法。
我能够独立完成GPIO口的配置和控制、定时器的配置和编程、ADC的配置和采样等任务。
实验结果表明,msp430具有强大的功能和灵活的编程能力,可以满足各种嵌入式系统的需求。
总结和展望:通过本次实验,我对msp430微控制器有了更深入的了解,并且掌握了一些基本的操作和编程技巧。
然而,由于实验时间和条件的限制,我还没有完全发挥出msp430的潜力。
用MSP430F149单片机实现步进电机通用控制器
霪 娶毋 r 蕈
- 0 0
0妻 嚣 j
关键词 :M S
单片机 ;步进 电机 ; 通用控制器
0 il l ≮
一I 嚣露 零 l。 l l 譬≯ l
系 统 设 计
系统 结构 本控 制 器 主要 实 现 了 多台 步进 电机 在 多段 曲线 上 的
\
\
,
技 术
,
i
一 一
f 放大的起动过程
运行曲线
…
用 机实现 单片 步进电 加/速控制, 际上 机的 减 实 就是
控制 发脉 冲的频 率 , 升速 时 , 使脉 冲频 率 增高 , 速时 相 减
反。 如果 使 用定 时 中断 来 控制 电机 的速 度 , 加减 速控 制 就
图4连续 模式的定 时间隔输 出
积小 、可 靠 性 高 。
一般不小于 5 s、脉冲序列的均匀度及高低电平方式 。 g)
7r甘 . 击 ] th : ‘ 吉 S , r 士 r , 企 I L 壬 7 7 陂 、 击 士
向一升 速 三 个过 程 。
步进 电机起动及加 / 减速控制方案
‘
…
脉
U
t l e .
r -
算是在定时中断外实现的, 并不 占用中断时间 , 保证电机
u
前D 硝 勺 I 最  ̄ c t; -P  ̄, .
-
后 /
\ D勺 -硝i 下- ̄  ̄t I第 c. P,
此时D l 向 II 换
的高速运行。
②证制度精性要一速准达 保控速的确;从个度确到
方 向 DR I
步 进 电 动 机 的 最 高 起 动 频 率 ( 跳 频 率 ) 般 为 突 一
MSP430单片机_步进电机与直流电机控制设计
//选择使用采样定时器, 转换模式选择-序列通道多次转换模式
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_3
ADC12MCTL3 = ADC12INCH_7 ;
//选择模拟输入通道
ADC12IE = BIT7;
// 中断使能 ADC12IFG.5
ADC12CTL0 |= ADC12ENC;
步进电机
2电路实现--- 连接示意图
直流电机
2电路实现---IO设置
通过DRV8833控制直流电机不步进电机
5V电压通过1N5819整流为DRV8833提供工作电压
MSP430F6638端口P1.1,P1.4,P1.7,P3.1作为
DRV8833的xIN输入端口;
VDD_5V
D7 1N5819 DC_5V
步进电机运行方向IO给电顺序
3代码实现--- 功能列表
步进电机
控制换相顺序: 通电换相这一个过程称为脉冲分 配;
控制步进电动机的转向:正转,反转;
控制步进电动机的速度:给步进电机一个脉冲, 就转一步;再发一个脉冲,会再转一步;两个脉冲 的间隔时间越短,步进电动机就转得越快;调整发 出的脉冲频率,就可以对步进电机进行调速; 脉 冲的频率决定了电机的转速。
1实现原理---步进电机
三相式步进电机内部结构
1实现原理---步进电机
概念 步进电机旋转的根本原因 错齿 术语 齿距角:齿之间的距离 步距角: 转子走一步所转过的角度 失步:转子的转速慢于换相速度则会引起失步 振荡:转子在电磁力的作用下在平衡点左右振 荡 拍:对绕组通电一次的操作称为一拍 对齿 错齿
}
4代码分析--- 直流电机
直流电机运行
基于MSP430实现的步进电机控制
作品概述MSP430G2 系列 Launchpad 是TI 推出的一款低成本的开辟平台。
它合用于适 用于 TI 最新 MSP430G2xx 系列产品, 其基于 USB 的集成型仿真器可提供为全系 列 MSP430G2xx 器件开辟应用所必需的所有软、硬件。
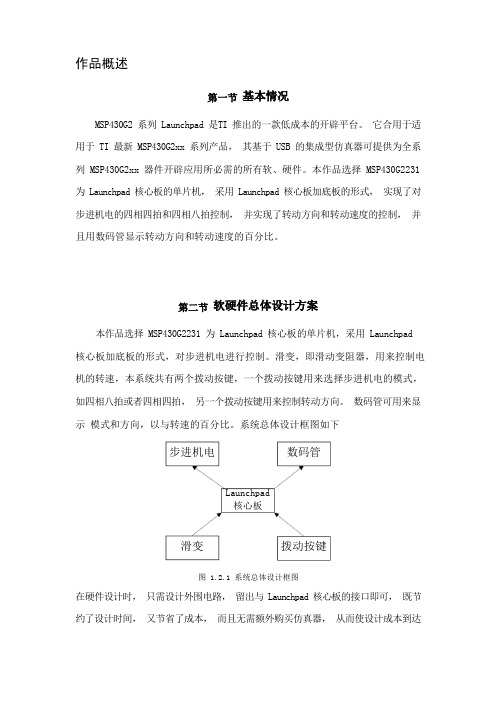
本作品选择 MSP430G2231 为 Launchpad 核心板的单片机, 采用 Launchpad 核心板加底板的形式, 实现了对 步进机电的四相四拍和四相八拍控制, 并实现了转动方向和转动速度的控制, 并 且用数码管显示转动方向和转动速度的百分比。
本作品选择 MSP430G2231 为 Launchpad 核心板的单片机,采用 Launchpad 核心板加底板的形式,对步进机电进行控制。
滑变,即滑动变阻器,用来控制电 机的转速,本系统共有两个拨动按键,一个拨动按键用来选择步进机电的模式, 如四相八拍或者四相四拍, 另一个拨动按键用来控制转动方向。
数码管可用来显示 模式和方向,以与转速的百分比。
系统总体设计框图如下图 1.2.1 系统总体设计框图在硬件设计时, 只需设计外围电路, 留出与 Launchpad 核心板的接口即可, 既节 约了设计时间, 又节省了成本, 而且无需额外购买仿真器, 从而使设计成本到达数码管Launchpad 核心板拨动按键步进机电滑变.最低。
在软件设计方面,可充分利用 G2 系列单片机的各个功能模块,如时钟系统、TA 定时器、 ADC10 模数转换器,看门狗,以与IO 口中断等资源,设计出高效率、低功耗、结构紧凑而又功能强大的产品。
第一章作品硬件系统设计MSP430G2 系列 Launchpad 是TI 推出的一款低成本的开辟平台。
它合用于适用于 TI 最新 MSP430G2xx 系列产品,其基于 USB 的集成型仿真器可提供为全系列 MSP430G2xx 器件开辟应用所必需的所有软、硬件。
LaunchPad 具有集成的 DIP 目标插座,可支持多达 20 个引脚,从而使 MSP430 Value Line 器件能够简便地插入 LaunchPad 电路板中。
基于msp430单片机的多功能直流电机驱动器实验
信息工程系课程设计报告书题目:基于MSP430单片机的多功能直流电机驱动器摘要本设计介绍了一种基于MSP430单片机实现的单闭环直流电机的调速系统,随着我国工业的发展,越来越多的生产机械要求能实现自动调速。
由于MSP430系列的单片机具有处理能力强、运算速度快、集成度高、外部设备丰富、超低功耗等优点, 本设计介绍了一种基于MSP430单片机实现的单闭环直流电机的调速系统,该系统利用MSP430单片机的Timer-A模式产生PWM波,通过改变PWM波的占空比来控制电机的速度,并着重介绍了PWM的调速原理。
其中采用光耦隔离的方法实现单片机与外部电路之间的电气隔离,PWM波经过功率驱动芯片放大后控制直流电机的电枢电压进行平滑调速并由霍尔元件检测出直流电机转速构成的速度反馈,设置四个独立性键盘分别控制电机的正反转、加速和减速,最后通过LED动态显示出直流电机的转速。
采用MSP430单片机控制直流电机的转速取代了以往的模拟控制,使控制精度高,而且方便系统的升级和改进,灵活性和适应性更强。
关键词:MSP430 PWM调速直流电机目录摘要 (2)目录 (3)1 任务提出与方案论证 (4)1.1 课题研究的目的意义 (4)1.1.1设计目的 (4)1.1.2设计的意义 (5)1.2 主要内容及方法手段 (5)1.2.1主要内容 (5)1.2.2方法手段 (5)2具体电路设计 (6)2.1 系统设计原理 (6)2.2 单片机的最小系统 (7)2.2.1电源 (7)2.2.2复位电路 (8)2.2.3晶体 (9)2.3 PWM波调速 (10)2.3.1直流电机PWM的调速原理 (10)2.3.2 Timer-A实现PWM (10)2.4 电机驱动电路 (11)2.4.1电气隔离电路 (11)2.4.2驱动电路 (12)2.5 LED显示 (14)2.6 测速电路 (15)3总结 (17)3.1 总结 (17)参考文献 (18)1 任务提出与方案论证1.1 课题研究的目的意义1.1.1 设计目的随着我国工业的发展,电动机作为电能转换的传动装置被广泛应用于机械、冶金、石油化学、国防等工业部门中,随着对生产工艺、产品质量的要求不断提高和产量的增长,越来越多的生产机械要求能实现自动调速。
msp430 实验报告
msp430 实验报告Title: MSP430 Experiment ReportIntroductionThe MSP430 is a series of microcontroller units (MCUs) developed by Texas Instruments. These MCUs are known for their low power consumption and high performance, making them ideal for a wide range of applications including consumer electronics, industrial control, and medical devices. In this experiment report, we will discuss the results of our experiments with the MSP430 MCU and its performance in various applications.Experiment 1: LED BlinkingIn our first experiment, we programmed the MSP430 to control the blinking of an LED. We used the MSP430 LaunchPad development kit, which includes a development board with an MSP430 MCU and various peripherals. By writing a simple program in the MSP430 Integrated Development Environment (IDE), we were able to control the blinking frequency of the LED. This experiment demonstrated the ease of programming and the low power consumption of the MSP430 MCU.Experiment 2: Sensor Data AcquisitionIn our second experiment, we connected a temperature sensor to the MSP430 and programmed it to acquire and process the sensor data. The MSP430's built-in analog-to-digital converter (ADC) allowed us to easily interface with the sensor and read the temperature values. We then used the MSP430's serialcommunication interface to transmit the data to a computer for further analysis. This experiment showcased the versatility of the MSP430 in interfacing with external sensors and communicating with other devices.Experiment 3: Power ManagementOne of the key features of the MSP430 is its low power consumption, which makes it suitable for battery-powered applications. In our third experiment, we tested the power management capabilities of the MSP430 by programming it to enter low-power modes when not actively processing data. We measured the current consumption in different power modes and compared it to the datasheet specifications. The results confirmed the MSP430's low power consumption and its ability to prolong battery life in portable devices. ConclusionOur experiments with the MSP430 MCU have demonstrated its versatility, ease of programming, and low power consumption. The MSP430's performance in controlling peripherals, interfacing with sensors, and managing power consumption makes it a compelling choice for a wide range of embedded applications. As technology continues to advance, the MSP430's capabilities will continue to make it a popular choice for developers seeking a reliable and efficient microcontroller solution.。
基于MSP430的步进电机实验-IO口控制
1、实现步进电机开启、停止;
2、
3、实现步进电机正转、反转;;
4、实现步进电机调速。
三、实验原理:
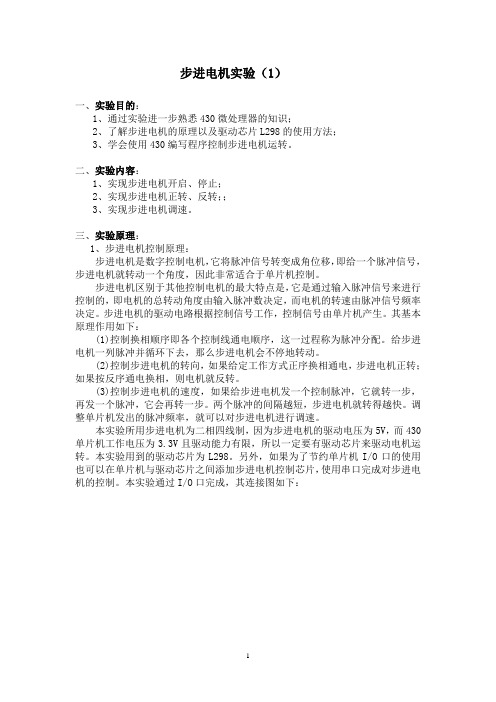
1、步进电机控制原理:
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。其基本原理作用如下:
Speed_Update();
delay(m);
P3OUT=BIT2+BIT3;
Speed_Update();
delay(m);
a=P1IN&0X10;//更新转向控制值
b=P1IN&0X20;//更新启动控制值
}
}
else if((a!=0x10)&&(b==0X20))//反转时序
{
while((a!=0x10)&&(b==0X20))
(1)控制换相顺序即各个控制线通电顺序,这一过程称为脉冲分配。给步进电机一列脉冲并循环下去,那么步进电机会不停地转动。
(2)控制步进电机的转向,如果给定工作方式正序换相通电,步进电机正转;如果按反序通电换相,则电机就反转。
(3)控制步进电机的速度,如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机发出的脉冲频率,就可以对步进电机进行调速。
{
while(tim--);
}
void Speed_Update(void)//延时选择子函数
步进电机控制实训报告

一、实训背景随着科技的飞速发展,步进电机在工业自动化、精密定位、医疗设备等领域得到了广泛的应用。
为了深入了解步进电机的原理和应用,提高自身的动手实践能力,我们进行了步进电机控制实训。
二、实训目标1. 理解步进电机的原理和工作方式。
2. 掌握步进电机的驱动方法和控制方法。
3. 学会使用单片机对步进电机进行编程和控制。
4. 提高团队协作能力和问题解决能力。
三、实训内容1. 步进电机原理步进电机是一种将电脉冲信号转换为角位移或线位移的执行元件。
其特点是响应速度快、定位精度高、控制简单。
步进电机每输入一个脉冲信号,就转动一个固定的角度,称为步距角。
步距角的大小取决于电机的结构,常见的步距角有1.8度、0.9度等。
2. 步进电机驱动步进电机的驱动通常采用步进电机驱动器。
驱动器将单片机输出的脉冲信号转换为驱动步进电机的电流信号,实现对步进电机的控制。
常见的驱动器有L298、A4988等。
3. 单片机控制本实训采用AT89C51单片机作为控制核心。
通过编写程序,控制单片机输出脉冲信号,实现对步进电机的正转、反转、停止、速度等控制。
4. 实训步骤(1)搭建步进电机驱动电路,连接单片机、步进电机、按键等外围设备。
(2)编写程序,实现以下功能:- 正转、反转控制;- 速度控制;- 停止控制;- 按键控制。
(3)使用Proteus仿真软件进行程序调试,验证程序的正确性。
(4)将程序烧录到单片机中,进行实际硬件测试。
四、实训结果与分析1. 正转、反转控制通过编写程序,实现了对步进电机的正转和反转控制。
在Proteus仿真软件中,可以观察到步进电机按照设定的方向转动。
2. 速度控制通过调整脉冲信号的频率,实现了对步进电机转速的控制。
在Proteus仿真软件中,可以观察到步进电机的转速随脉冲频率的变化而变化。
3. 停止控制通过编写程序,实现了对步进电机的停止控制。
在Proteus仿真软件中,可以观察到步进电机在停止信号后立即停止转动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机硬件应用课程设计一、实验内容及要求题目:步进电机控制设计使用单片机为核心,设计一个步进电机控制器。
基本要求:使用单片机为控制核心,编写程序并设计硬件结构,实现对步进电机的控制。
步进电机按固定方向连续转动。
对电机的运行方向进行控制,如:要求按下A 键时,能够控制步进电机正转;按下B键时,能够控制步进电机反转。
提高要求(选作):用LED数码管显示步进电机的转动状态;增加启动、停止控制按键。
二、小组成员三、实验软硬件环境简介硬件环境:MSP430G2553单片机一块,五线四相步进电机一个,驱动芯片ULN2003一块,开关三个,下载线一根。
软件设计:仿真软件PROTEUS 8.0 Professional;代码编写软件IAR;WINDOWS操作系统。
四、设计方案分析步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电设备,它实际上是一种单相或多相同步的步进电机。
单相步进电机由单路电脉冲驱动,输出功率一般很小,故需要加一个驱动电路。
当向脉冲分配器输入一个脉冲时,电动机各相的通电状态就会发生改变,转子会转过一定的角度(称为步距角)。
正常情况下,步进电机转过的总角度和输入法的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
步进电机的不同驱动方式,都是在工作时,脉冲信号按一定顺序轮流加到三相绕组上,从而实现不同的工作状态。
步进电机有三线式、五线式、六线式三种,但其控制方式均相同,都必须以脉冲电流来驱动。
若每转一圈以20个励磁信号来计算,则每个励磁信号前进18°,其旋转角度与脉冲数成正比,正反转可以由脉冲顺序来控制。
步进电机的励磁方式可分为全部励磁及半步励磁,其中全部励磁又有1相励磁及2相励磁之分,而半步励磁又称为1-2相励磁。
1相励磁法:在每一瞬间只有一个线圈导通。
消耗电力小,精确度良好,但转矩小,振动较大,每一励磁信号可走18°。
若以1相励磁法控制步进电机正转,其励磁顺序表如下。
若以励磁信号反响传送,则步进电机反转。
本实验中采用这个方法。
2相励磁法:在每一瞬间会有2个线圈同时导通。
因其扭矩大,振动小,故为目前使用最多的励磁方式,每送一个励磁信号可走18°,若以两相励磁法控制步进电机正转,其励磁顺序如下表。
若以励磁信号反向传送,则步进电机反转。
1-2相励磁法:为1-2相交替导通。
因分辨率提高,且运转平顺,每送一励磁信号可走9°,故也被广泛采用。
若以1相励磁法控制步进电机正转,其励磁顺序见表,若以励磁信号反向传送,则步进电机反转。
步进电机的负载转矩与速度成反比,速度越快负载转矩越小,但速度快至极限时,步进电机将不再运转。
所以每走一步后,程序必须延时一段时间。
五、系统硬件结构1、硬件设计思路及芯片选择5.1.1 单片机系统P1.0-P1.3作为输出端口,控制步进电机的励磁信号,进而控制步进电机的运行状态。
P2.0-P2.2作为输入端口,连接开关,决定开关的闭合状态。
5.1.2 开关设计本实验中采用三个开关,分别控制电机的正转、反转、加速。
其连接图如下所示:在开关未闭合的时候,连接电阻与电源,输出为高电平;在开关闭合的时候,连接GND,输出为地。
5.1.3 驱动电路单相步进电机由单路电脉冲驱动,输出功率一般很小,故需要加一个驱动电路。
本实验中采用驱动芯片ULN2003A(达林顿驱动芯片),与P1.0-P1.3相接。
ULN是集成达林顿管IC,内部还集成了一个消线圈反电动势的二极管,可用来驱动继电器。
它是双列16脚封装,NPN晶体管矩阵,最大驱动电压=50V,电流=500mA,输入电压=5V,适用于在使用TTL COMS,由达林顿管组成驱动电路。
它的输出端允许通过电流为200mA,饱和压降VCE 约1V左右,耐压BVCEO 约为36V。
用户输出口的外接负载可根据以上参数估算。
采用集电极开路输出,输出电流大,故可直接驱动继电器或固体继电器,也可直接驱动低压灯泡。
通常单片机驱动ULN2003时,上拉2K的电阻较为合适,同时,COM 引脚应该悬空或接电源。
ULN2003是一个非门电路,包含7个单元,但独每个单元驱动电流最大可达350mA.资料的最后有引用电路,9脚可以悬空。
ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中。
可直接驱动继电器等负载。
输入5VTTL电平,输出可达500mA/50V。
ULN2003是高耐压、大电流达林顿陈列,由七个硅NPN达林顿管组成。
该电路的特点如下: ULN2003的每一对达林顿都串联一个2.7K的基极电阻,在5V的工作电压下它能与TTL和CMOS电路直接相连,可以直接处理原先需要标准逻辑缓冲器。
ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。
ULN2003A引脚如下:5.2系统框图驱动器及步进电机部分MSP430G2553芯片开关控制部分六、软件系统说明1.软件设计思路由单片机的P1.0-P1.3端口来控制小型步进电机,步进每步为18°。
直接采用ULN2003驱动电路。
该电路使用两相步进电机,采用1相激磁法,正转的激磁信号时序为0FEH,0FDH,0FBH,0F7H。
循环5次为20步,该步进电机每步为18°,20步为一圈。
反转的激磁信号时序为0F7H,0FBH,0FDH,0FEH。
当闭合加速开关时,通过变量的值来控制不同的延时时间,来达到调节转速的功能。
3.各个模块说明6.3.1 延时函数void delayus(uint t){uint i;while(t--)for(i=1300;i>0;i--);延时参数为t,不同的t对应不同的延时时间,达到改变速度的目的。
6.3.2 正转主程序if((P2IN&0X07)==0X06){while((P2IN&0X07)==0X06){P1OUT=0XFE;delayus(100);P1OUT=0XFD;delayus(100);P1OUT=0XFB;delayus(100);P1OUT=0XF7;delayus(100);}}6.3.3 反转主程序if((P2IN&0x07)==0X05){while((P2IN&0X07)==0X05)P1OUT=0XF7;delayus(100);P1OUT=0XFB;delayus(100);P1OUT=0XFD;delayus(100);P1OUT=0XFE;delayus(100);}}6.3.4 正转的加速主程序if((P2IN&0X07)==0X02){while((P2IN&0X07)==0X02){P1OUT=0XFE;delayus(m--);P1OUT=0XFD;delayus(m--);P1OUT=0XFB;delayus(m--);P1OUT=0XF7;delayus(m--);if(m<4)m=80;}}通过m--使延时时间不断减小,但是当延时时间过短时,脉冲频率过大,使电机无法转动,故当m小于4时,恢复原来的速度。
6.3.5 反转的加速主程序if((P2IN&0X07)==0X01){while((P2IN&0X07)==0X01){P1OUT=0XF7;delayus(m--);P1OUT=0XFB;delayus(m--);P1OUT=0XFD;delayus(m--);P1OUT=0XFE;delayus(m--);if(m<4)m=80;}}6.3.6 其他情况下if((P2IN&0X07)==0X07) //其他情况下静止 P1OUT=0XFF;其他情况下时,电机处于静止不动的状态4.源程序#include <msp430g2553.h>#define uchar unsigned char#define uint unsigned int/************延迟函数**********/void delayus(uint t){uint i;while(t--)for(i=1300;i>0;i--);}/***********主函数**********/void main(void){WDTCTL=WDTPW+WDTHOLD;P1DIR=0xFF;P1SEL=0X00;P1OUT=0XFF;int m=80;while(1){if((P2IN&0X07)==0X06) //正转{while((P2IN&0X07)==0X06){P1OUT=0XFE;delayus(100);P1OUT=0XFD;delayus(100);P1OUT=0XFB;delayus(100);P1OUT=0XF7;delayus(100);}}else if((P2IN&0x07)==0X05) //反转{while((P2IN&0X07)==0X05){P1OUT=0XF7;delayus(100);P1OUT=0XFB;delayus(100);P1OUT=0XFD;delayus(100);P1OUT=0XFE;delayus(100);}}else if((P2IN&0X07)==0X02) //正转加速 {while((P2IN&0X07)==0X02){P1OUT=0XFE;delayus(m--);P1OUT=0XFD;delayus(m--);P1OUT=0XFB;delayus(m--);P1OUT=0XF7;delayus(m--);if(m<4)m=80;}}else if((P2IN&0X07)==0X01) //反转加速 {while((P2IN&0X07)==0X01){P1OUT=0XF7;delayus(m--);P1OUT=0XFB;delayus(m--);P1OUT=0XFD;delayus(m--);P1OUT=0XFE;delayus(m--);if(m<4)m=80;}}else if((P2IN&0X07)==0X07) //其他情况下静止 P1OUT=0XFF;}}七.系统设计结果1.正转的仿真图2.反转的仿真图八.实验改进1.在激磁法上,可以使用1-2相励磁,可以增加更大的扭矩。
2.此实验还可以增加减速,以及数码管显示功能。