《机械原理》课程补充习题
机械原理_朱龙英主编_习题解答(全)

《机械原理》习题解答机械工程学院第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
解:a)平面高副b)空间低副c)平面高副2-8将图2-27中机构的结构图绘制成机构运动简图,标出原动件和机架,并计算其自由度。
解:b)n=3,P=4 ,H P=0,F=3×3-2×4=1Lc) n=3,P=4 ,PH=0,F=3×3-2×4=1L2-9试判断图2-28中所示各“机构”能否成为机构,并说明理由。
《机械原理》第八版课后习题答案
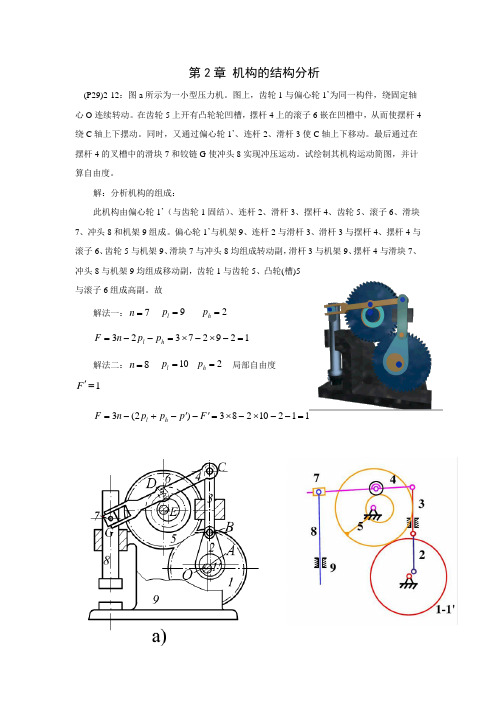
第2章 机构的结构分析(P29)2-12:图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:7=n 9=l p 2=h p12927323=-⨯-⨯=--=h l p p n F解法二:8=n 10=l p 2=h p 局部自由度1='F11210283)2(3=--⨯-⨯='-'-+-=F p p p n F h l(P30) 2-17:试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n Fb) 5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F12625323=-⨯-⨯=--=h l p p n Fc) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n Fd) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F(C 可看做是转块和导块,有1个移动副和1个转动副)齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
机械原理习题及答案(1-1至4-3)精品PPT课件
同下,其最少齿数为13( 20,ha*1 ).
答:z=13
做人,无需去羡慕别人,也无需去花 时间去 羡慕别 人是如 何成功 的,想 的只要 是自己 如何能 战胜自 己,如 何变得 比昨天 的自己 强大就 行。自 己的磨 练和坚 持,加 上自己 的智慧 和勤劳 ,会成 功的。 终将变 成石佛 那样受 到大家 的尊敬 。
lAB lBC lCD lAD
lAB50 35 30 lAB 15
答:lAB 15mm
2.当AD为机架,此机构为双曲柄机构,
则AD为最短杆,据曲柄存在条件,分两种情况;
(1)若 l AB 为最长杆,则 lAD lAB lBC lCD
30 lAB50 35
lAB55mm
A C lB C lA B 8 0 5 .0m 0 7 2 m 0m
A' C lA B lB C 8 0 5 .0m 0 1 2 m 7
另一解: lAB 21.5mm
lBC 48.5mm
l 0.002 m / mm
图示铰链四杆机构中,已
2-7 知 lAB30mm,lAD60mm,lDE10mm,原
答: z 21( ha *coC s*) 42
4-2: 5-4 一渐开线直齿轮,用卡尺测量其三个齿和两个齿的公法
线齿长根度圆为直W 径3df62.1176m2mm m,W ,齿2 数3z=9.3248m .试,m 齿确顶定圆该直齿径轮的da模2数0m8m,m,
压力角
,齿顶高系数
rb
mzcos
2
rf m(2zha*C*)
机械原理习题及答案(1-1至4-3) ppt课件
ppt课件
7
ppt课件
8
1-4 试绘出偏心回转油泵机构简图,并计算其自由度。
ppt课件
9
1-2 计算图示平面机构的自由度,并拆杆组, 确定机构所含杆组的数目和级别以及机构的级别。 机构中的原动件用箭头表示。
ppt课件
10
1-2a
解:
依次拆下2-3,5-6,4-7,9-8,四个II级组,
故为II级机构。
2-3
1-4b (答案)
(答案a)(答案b)
1-4c (答案)
(答案c)(答案d)
(答案e)(答案f)
2-4 (答案a)(答案b)
3-1 (答案) 3-2(答案a)(答案b) 3-3 (答案)
2-5 (答案) 2-6答案 2-7答案
3-4 (答案)
(答案) (答案) (答案)
ppt课件
1
1-1 试画出下列各机构的运动简图,并分别计算其自由度。
A为复合铰链。
n 10, pL 14, pH 0,
F 310 21p4pt课件 2.
11
ppt课件
12
1-2b
解: 依次拆下6-7,4-5,2-3 三个II级组,故为II级机构。 C为复合铰链。
n 7, pL 10, pH 0,
F 37 210 ppt课件 1.
ppt课件
51
3-4 4-7 用作图法求凸轮的各参数尺寸:
基圆半径 rb
最大压力角 max
行程 h
推程角
远休止角
10mm
30
23mm
180
0
ppt课件
52
4-1
5-3 当 20的正常齿渐开线标准齿轮的齿根圆和基圆相
机械原理第七版课后答案
机械原理第七版课后答案
1. 机械原理是工程学中的重要基础课程,它涉及到机械结构、运动学、动力学等方面的知识,对于理解和设计各种机械系统都具有重要意义。
在学习机械原理的过程中,课后习题是检验学生对知识掌握程度的重要手段。
因此,以下是机械原理第七版课后答案,供大家参考。
2. 第一章机械原理基础知识。
1. 什么是机械原理?
答,机械原理是研究机械运动规律和机械结构工作原理的科学。
2. 机械原理的研究对象包括哪些方面?
答,机械原理的研究对象包括机械结构、运动学、动力学等方面的知识。
3. 第二章机械结构。
1. 什么是机械结构?
答,机械结构是由零件和零件之间的连接构成的整体。
2. 机械结构的作用是什么?
答,机械结构的作用是传递和转换力、运动和能量。
4. 第三章运动学。
1. 什么是运动学?
答,运动学是研究物体运动状态、运动轨迹和运动规律的学科。
2. 运动学的研。
《机械原理》课程补充习题
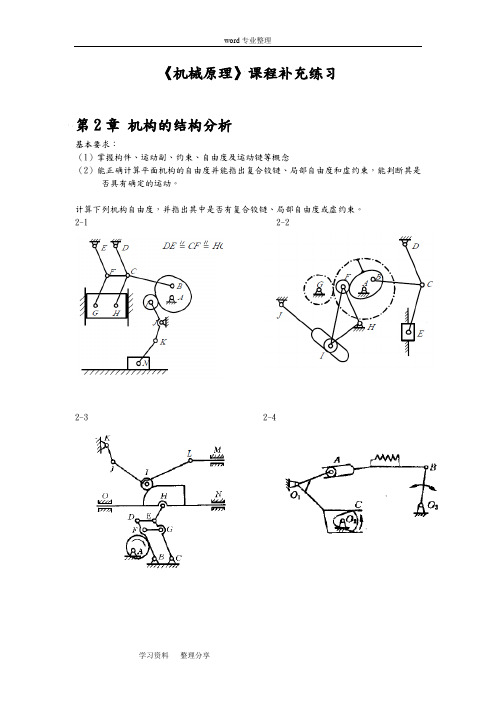
《机械原理》课程补充练习第2章机构的结构分析基本要求:(1)掌握构件、运动副、约束、自由度及运动链等概念(2)能正确计算平面机构的自由度并能指出复合铰链、局部自由度和虚约束,能判断其是否具有确定的运动。
计算下列机构自由度,并指出其中是否有复合铰链、局部自由度或虚约束。
2-1 2-22-3 2-42-5 2-62-72-8) 2-9)2-10) 2- 11)2-14 2-152-16)2-19 2-20第3章平面机构的运动分析基本要求:1)正确理解速度瞬心的概念,并能运用三心定理确定一般平面机构各瞬心的位置,利用瞬心法对简单高、低副机构进行速度分析2)能利用矢量方程图解法对一般平面机构进行运动分析3-1 试求图示各机构在图示位置时的全部瞬心的位置。
(g) (h)3-2 图示机构的位置,已知原动件AB以等角速度转动,用瞬心法或矢量方程图解法求构件3的角速度要求:(1)利用瞬心法要求在图上标出全部速度瞬心,写出ω3的表达式;(2)利用矢量方程图解法要求以任意比例尺作出机构的速度图,写出作图的矢量方程及ω3的表达式。
(a) (b)(c) (d)(f) (g)逆时针方向转动,3-3如图所示的高副机构中,设已知机构的尺寸及原动件1以匀角速度1v。
试确定机构的全部瞬心位置,并用瞬心法求构件3 的移动速度33-4图示机构,L AB=50mm,L BC=60mm,L CD=60mm,LAD=100mm,ω1=30rad/s,(1)求机构的所有瞬心(2)用瞬心法求杆BC中E的速度大小和方向。
第4章平面机构的力分析基本要求能对几种运动副中的摩擦力、总反力进行分析4-1 图示曲柄滑块机构中,设已知机构尺寸,图中虚线圆为摩擦圆,滑块与导路的摩擦角为φ,驱动力为F,阻力矩为M,试在下列各机构位置简图中画出各运动副中反力方向(必须注明力矢量的脚标)(d)4-2 图示曲柄滑块机构,曲柄1受驱动力偶M d作用,克服滑块3上所受的工作阻力F r,使该机构运转。
机械原理课后习题答案
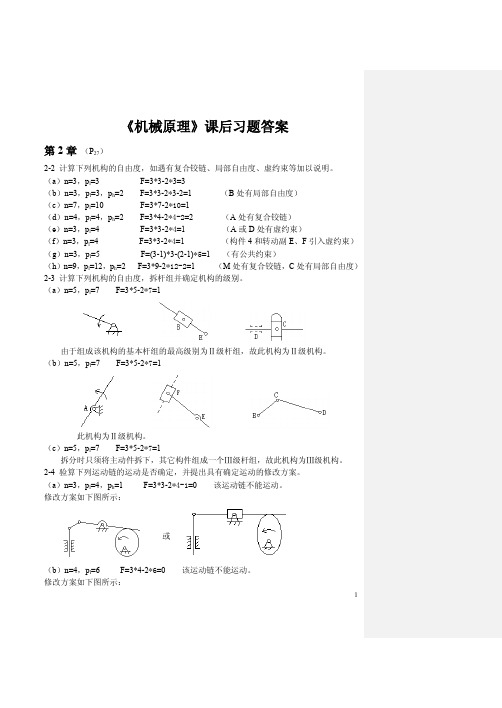
《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:12或第3章(P 42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a ) (b ) (c ) (a) v 3=v P13=ω1P 14P 13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P 13来讨论轮1与轮3的传动比i 13。
第5章 (P 80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:35-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械原理》课程补充练习第2章机构的结构分析基本要求:(1)掌握构件、运动副、约束、自由度及运动链等概念(2)能正确计算平面机构的自由度并能指出复合铰链、局部自由度和虚约束,能判断其是否具有确定的运动。
计算下列机构自由度,并指出其中是否有复合铰链、局部自由度或虚约束。
2-1 2-22-3 2-42-5 2-62-72-8) 2-9)2-10) 2- 11)2-14 2-152-16)2-19 2-20第3章平面机构的运动分析基本要求:1)正确理解速度瞬心的概念,并能运用三心定理确定一般平面机构各瞬心的位置,利用瞬心法对简单高、低副机构进行速度分析2)能利用矢量方程图解法对一般平面机构进行运动分析3-1 试求图示各机构在图示位置时的全部瞬心的位置。
(g) (h)3-2 图示机构的位置,已知原动件AB以等角速度转动,用瞬心法或矢量方程图解法求构件3的角速度要求:(1)利用瞬心法要求在图上标出全部速度瞬心,写出ω3的表达式;(2)利用矢量方程图解法要求以任意比例尺作出机构的速度图,写出作图的矢量方程及ω3的表达式。
(a) (b)(c) (d)(f) (g)逆时针方向转动,3-3如图所示的高副机构中,设已知机构的尺寸及原动件1以匀角速度1v。
试确定机构的全部瞬心位置,并用瞬心法求构件3 的移动速度33-4图示机构,L AB=50mm,L BC=60mm,L CD=60mm,LAD=100mm,ω1=30rad/s,(1)求机构的所有瞬心(2)用瞬心法求杆BC中E的速度大小和方向。
第4章平面机构的力分析基本要求能对几种运动副中的摩擦力、总反力进行分析4-1 图示曲柄滑块机构中,设已知机构尺寸,图中虚线圆为摩擦圆,滑块与导路的摩擦角为φ,驱动力为F,阻力矩为M,试在下列各机构位置简图中画出各运动副中反力方向(必须注明力矢量的脚标)(d)4-2 图示曲柄滑块机构,曲柄1受驱动力偶M d作用,克服滑块3上所受的工作阻力F r,使该机构运转。
在转动副A、B和C处虚线下画的小圆为摩擦圆。
设不考虑各构件的重量与惯性力,试确定各运动副反力的方向。
4-3 图示为一摆动推杆盘形凸轮机构,凸轮 1 沿逆时针方向回转,F 为作用在推杆2 上的外载荷,试在图上标出各运动副中总反力(R31,R12 及R32)的方位(图中各构件的重量及惯性力略去不计,虚线小圆为摩擦圆,运动副B处的摩擦角已知)4-4 图示摆动凸轮机构中,已知作用于摆杆3上的外载荷Q,试在图上标出各运动副中总反力(R31,R12 及R32)的方位(图中各构件的重量及惯性力略去不计,虚线小圆为摩擦圆,运动副B处的摩擦角已知)4-5 在图示机构中,已知驱动力为F,工作阻力矩为Mr,若不计各构件的重量及惯性力,试在机构图中画出各构件的受力。
图中虚线圆为摩擦圆,摩擦角为φ。
4-6 在图示机构中,已知原动件1 在驱动力矩M d 的作用下等速转动,ω1 如图所示。
作用在从动件2 上的生产阻力为Q,图中虚线圆为摩擦圆,运动副C 的摩擦角为φ。
试在图上画出各运动副反力(注明脚标),写出构件2 的力平衡方程式,并画出力矢量多边形。
4-7 图示一锁紧机构,已知图中虚线圆为摩擦圆,摩擦角为φ在P力作用下工作面上产生夹紧力Q,试画出此时各运动副中的总反力作用线位置和方向(不考虑各构件的质量和转动惯量)4-8 已知各构件的尺寸、机构的位置、各运动副的摩擦系数及摩擦圆半径,M1为驱动力矩,Q为阻力,试在图中画出各运动副反力的方向和作用线4-9 图示铰链机构中,各铰链处虚线圆为摩擦圆,M d为驱动力矩,M r为生产阻力矩,试在图上画出各运动副反力的方向和作用线。
4-10图示凸轮连杆组合机构运动简图,凸轮为原动件,滑块上作用有工作阻力Q,各转动副处的摩擦圆及滑动摩擦角如图所示,试在图上画出各运动副反力方向和作用线。
4-11 图示的机构运动简图中,已知生产阻力Q,各转动副的摩擦圆及滑动摩擦角已示图中,试在图中画出各运动副反力的作用线及方向。
4-12图示的机构运动简图中,已知P为驱动力,生产阻力Q,各转动副的摩擦圆及滑动摩擦角已示图中,试在图中画出各运动副反力的作用线及方向。
4-13图示的机构运动简图中,已知生产阻力Q ,各转动副的摩擦圆及滑动摩擦角已示图中,试在图中画出各运动副反力的作用线及方向。
4-14 图示铰链机构中,各铰链处虚线圆为摩擦圆,M d 为驱动力矩,F r 为生产阻力矩,试在图上画出各运动副反力的方向和作用线。
4-15图示双滑块机构中,滑块1在驱动力P 作用下等速运动,各构件重量不计。
试作图标出各运动副中的反力的方向,并对构件1、3列出力平衡方程且作出相应的力多边形。
(摩擦角、摩擦圆如图示)32 1 2 22 ω1第八章 平面连杆机构及其设计8-1 在飞机起落架所用铰链四杆机构ABCD 中,已知连杆的两位置如图所示,比列尺为μl ,要求连杆B 2C 2为死点位置上,连架杆CD 的的转角为900。
试设计此铰链四杆机构AB l 、CD l 、AD l (作图在题图上进行)。
8-2设计一铰链四杆机构,已知连杆BC 经过图示两个给定位置B 1C 1、B 2C 2,要求:连架杆AB 从AB 1到AB 2位置时恰好转过90°;机构在第二位置时传动角γ=30°,试用作图法求解固定铰链A 、D 位置。
8-3所示为造型机工作台翻转机构翻台的两个位置Ⅰ、Ⅱ。
设翻台固联在连杆BC 上,若已知连杆长500=BC l mm ,500=CK l mm ,并要求其固定铰链A 、D 的安装位置与x 轴平行,且AD=BC ,试设计此铰链四杆机构。
8-4所示为一利用死点位置的焊接夹紧装置。
按图中箭头方向转动手柄F ,则CD 杆随之转动,而使其上的压板E 向工件压去。
问机构转到什么位置时,压板把工件压紧在工作台上,当松开手柄后,机构不致由于压紧力的反作用而反转,使被压紧的工件松开。
试用作图法求出上述压紧工件时的机构位置。
已知机构各杆长是: 110=AB l mm ,45=BC l mm ,90=CD l mm ,50=AD l mm 。
8-5碎矿机用曲柄摇杆机构如图所示,已知摇杆长为500mm ,摆角045=φ,其中左极限位置为垂直,铰链A 、D 同在水平线上,行程速度变化系数5.1=K ,试用图解法确定机架AD 、曲柄AB 及连杆BC 的长度。
(保留作图线)8-6 如图所示,已知摇杆两极限位置从C 1D 与C 2D,长度L CD =150mm(图中μl =0.005m/mm) 行程速比系数k=1.5,另一固定铰链在机架标线DE 上,试用作图法设计该铰链四杆机构。
8-7 曲柄摇杆机构机架d =38 mm ,摇杆长c =45 mm ,其摆角ψ=50°,试确定曲柄长a 和连杆长b 。
8-8有一曲柄摇杆机构,机架位于水平线上。
已知其摇杆长L CD =420 mm ,摆角ψ=90o 。
,摇杆在两极限与机架所成的夹角各为60o 和30o ,机构的行程速比系数K =1.5,设计此四杆机构。
求出曲柄长度a 和连杆长度b 。
8-9图解设计一曲柄摇杆机构,求曲柄和连杆的长度、已知摇杆的长度L CD =100mm,其极限位置之间夹角ψ=<C 1C 2D =60o ,行程速比系数K =1.4,且要求AD 平行与C 1C 2。
8-10设计一曲柄摇杆机构,已知摇杆长度mm l 803=,摆角040=ϕ,摇杆的行程速比系数为1=K ,且要求摇杆CD 的一个极限位置与机架间的夹角090=∠CDA ,试用图解法确定其余三杆的长度。
8-11设计一铰链四杆机构,已知其摇杆CD 的行程速比系数K=1,摇杆的长度l CD =150mm ,摇杆的极限位置与机架所成的角度ϕ=30°和ϕ”=90°。
求曲柄l AB 、连杆l BC 及机架l AD 的长度。
8-12试设计所示的脚踏轧棉机上的曲柄摇杆机构。
要求踏板CD 在水平位置上下各摆10°,l CD =500 mm ,l AD =1000 mm ,用几何作图法求曲柄l AB 和连杆l BC 的长度。
8-14参看附图设计一铰链四杆机构,已知其摇杆 CD 的长度为75mm,行程速比系数K=1.5,机架AD 的长度为100mm,又知摇杆的一个极限位置与机架间的夹角为45度 ,试求曲柄AB 的长度和连杆BC 的长度(有两组解)。
8-15牛头刨床的摆动导杆机构如图所示,已知机架mm l AB 400=,行程速比系数65.1=K ,试用作图法设计此机构。
8-16 设计一摆动导杆机构,已知机架长度为100mm ,行程速比系数K=1.4,求曲柄长度。
8-17 图(a )所示为一牛头刨床的示意图。
已知l AB=75mm ,l DE=100mm ,行程速比系数K =2,刨头5 的行程H =300mm 。
要求在整个行程中,刨头5 有较小的压力角,试设计此机构。
8-18设计一曲柄滑块机构,如图所示,已知滑块的行程H =50mm ,行程速比系数K =1.5,偏距e =20mm 。
8-19设计一偏心曲柄滑块机构,已知滑块的行程H=67mm ,偏心距e=40mm ,要求行程速比系数K=1.4。
8-20 一滑块C 沿mm 移动,其行程S =50mm ,曲柄AB 逆时针绕固定铰链A 旋转,且A 位于nn 线上,已知行程速比系数K =1.4,作图求曲柄与连杆长。
8-21设计一偏置曲柄滑块机构,已知行程速比系数K=1.4,滑块的冲程S=60mm ,连杆与曲柄长度之比λ=3,求曲柄、连杆及偏距e 之长。
m n nm8-22参考图示设计一曲柄滑块机构,已知滑块的行程速比系数5.1=K ,滑块行程mm H 50=,导路偏距mm e 20=,求曲柄长度AB l 和连杆长度BC l 。