电力系统暂态分析微代数方程的推导
电力系统暂态分析方法

2 数值解法
在忽略发电机定子绕组和电网中电磁暂态过程影响的情况下,列出描述全系统暂态过程的微分方程和代数方程组。其一般形式为:
px = f(x,y) (1)
g(x,y)=0 (2)
微分方程(1)包括:①描述各发电机暂态和次暂态电势变化的微分方程。②各发电机的转子运动方程。③描述各发电机励磁系统暂态过程的微分方程。④描述各原动机及调速系统暂态过程的微分方程。⑤负荷中感应电动机的暂态过程方程式。
ห้องสมุดไป่ตู้
由于直接法不是从时域的系统运动轨迹去看稳定问题,而是从系统能量及其转化的角度去看稳定问题,因此可快速进行系统稳定性分析。该方法在近二三十年得到了迅速的发展。直接法的优点是能提供系统稳定程度的定量信息,提供系统稳定裕度,对极限参数计算速度快,可快速扫描系统暂态过程。缺点是采用的模型比较粗略,计算结果具有保守性。
代数方程(2)包括:①网络方程式,用以描述在同步旋转坐标参考轴下,各节点电压、电流之间的关系。②各发电机定子绕组电压平衡方程式。③对于静态模拟负荷,其功率与节点电压之间的关系;对综合负荷中的感应电动机,计算电磁转矩,机械转矩,等值阻抗或定子电流的方程式。
在列出上述微分方程和代数方程组后,应用各种数值积分方法进行求解。由于在每一积分步长内必须同时求解微分方程和代数方程,需要在一般单纯求解微分方程组的数值积分方法基础上加以扩展,为此有两种不同的方法:交替求解法和联立求解法。
联立求解法在每一积分步长中,将微分方程式按照所采用的数值积分方法化成相应的差分方程,与代数方程一起组成两组代数方程式,再联立求解。求解的方法通常采用牛一拉法。联立求解法仅适用于各种隐式积分法,且联立求解的计算工作量很大,应用不是十分广泛。
按照数值积分方法的不同,暂态稳定的数值解法又分为显式积分法和隐式积分法。
MATLAB实验电力系统暂态稳定分析报告
实验三 电力系统暂态稳定分析电力系统暂态稳定计算实际上就是求解发电机转子运动方程的初值问题,从而得出δ-t 和ω-t 的关系曲线。
每台发电机的转子运动方程是两个一阶非线性的常微分方程。
因此,首先介绍常微分方程的初值问题的数值解法。
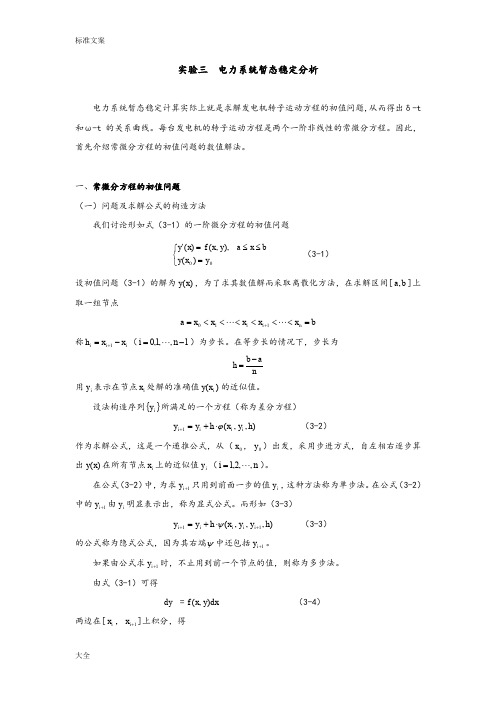
一、常微分方程的初值问题 (一)问题及求解公式的构造方法我们讨论形如式(3-1)的一阶微分方程的初值问题⎩⎨⎧=≤≤='00)(),,()(y x y bx a y x f x y (3-1) 设初值问题(3-1)的解为)(x y ,为了求其数值解而采取离散化方法,在求解区间[b a ,]上取一组节点b x x x x x a n i i =<<<<<<=+ 110称i i i x x h -=+1(1,,1,0-=n i )为步长。
在等步长的情况下,步长为nab h -=用i y 表示在节点i x 处解的准确值)(i x y 的近似值。
设法构造序列{}i y 所满足的一个方程(称为差分方程)),,(1h y x h y y i i i i ϕ⋅+=+ (3-2)作为求解公式,这是一个递推公式,从(0x ,0y )出发,采用步进方式,自左相右逐步算出)(x y 在所有节点i x 上的近似值i y (n i ,,2,1 =)。
在公式(3-2)中,为求1+i y 只用到前面一步的值i y ,这种方法称为单步法。
在公式(3-2)中的1+i y 由i y 明显表示出,称为显式公式。
而形如(3-3)),,,(11h y y x h y y i i i i i ++⋅+=ψ (3-3)的公式称为隐式公式,因为其右端ψ中还包括1+i y 。
如果由公式求1+i y 时,不止用到前一个节点的值,则称为多步法。
由式(3-1)可得dy =dx y x f ),( (3-4)两边在[i x ,1+i x ]上积分,得⎰++=+1))(,()()(1i ix x i i dx x y x f x y x y (3-5)由此可以看出,如果想构造求解公式,就要对右端的积分项作某种数值处理。
电路暂态过程分析
uC(0+) = uC(0)
iL(0+) = iL(0)
换路后瞬间
§6-2 产生过渡过程的条件
储能元件
换路
iL(0+) iL( )
uC (0+ ) uC ( )
?
那个电路有暂态?
t =0_
t=
u U C S
u U C S
1 拉氏变换
1) 定义
st F ( s ) f ( t ) e d t
拉普拉斯变换,记作
L f ( t ) F ( s )
j 1 st f( t) F ( s ) e d t j 2 j
拉普拉斯反变换,记作
1 L F ( s ) f ( t )
5
2 5
t
u ( t ) U u ( t ) 4 2 e 2 S 1
1 . 5 10 t
5
V
RV =1.5 M 设IL =1A
• 先断S1
电压表端电压过高,有损毁电表的可能。
电压表端电压:
• 先断S2,再断S1
1.5 MV
击穿S1处的空气,形成电弧或火花 并接二极管D
C2 uc1(0-C )1 = uc2(0-) = uc3(0-) =0 uc0(0+) = 0 C3 u2(0+) = 6V 2) 确定终值 R1 U t =0 u ( ) u ( ) _ S R 2 V C R 1 1 + u R R u ( ) 4 V + 1 1 2 2 + t =0 6V 3) 确定时间常数 u 2 + R2 _ 2 * 5 * R6V = R1 // R2 = 20/3 k _ R C 10 s 0 t5 _ u ( t ) u ( ) [ u ( 0 ) u ( )] e 1 1 1 1
电力系统暂态稳定性分析方法讲解

对于一个实际动态系统,需要解决的两个关键问题是:
①如何合理地构造或定义一个准确能量型函数,并使其大小能正确 反映系统失稳的危害性;
②如何确定系统的临界能量,以便根据扰动结束时的李雅普诺夫函 数值和临界值的差来判断系统的稳定性。
应用到电力系统中,用系统的状态变量表示的暂态能量函数
(TEF)描述了系统在故障阶段及故障后阶段不同时刻系统的暂 态能量。这种暂态能量是由故障所激发,并在故障阶段形成。
x 电抗
, d
后的内电动势E ,为恒定值,并设机械功率Pm为恒定值,
则系统完整的标幺值数学模型为
M
d
dt
Pm
Pe
(1)
d
dt
其中:电磁功率
Pe
EU
X
w —转子角速度和同步速的偏差;
—发电机转子角;
M —发电机惯性时间常数;
E —发电机内电动势复数相量;
U0 —无穷大母线参考电压相量; X —两量间的等值电抗, 设两电动势间的等值电阻近似为零。
?构造暂态能量函数设系统动能为mepp?3221?mvk?2k将1式的加速方程的两边对积分求得出故障切除时的动能即?0002212ccckccmevmmddmdppdadt????????????????????的面积ddt???若定义系统的为以故障切除后系统稳定平衡点s为参考点的势能它反映系统吸收动能的性能则故障切除时的系统势能为pv3cpcemsvppdb???????的面积系统在故障切除时总暂态能量v为
个过渡过程中的发电机转子摇摆曲线 (t) ,而只需求出故障切除 (扰动结束)时的c 和c。据此计算系统总能量VC ,并设法确定
临界能量VCr ,再通过比较二者来判别稳定性,从而工作量可大大 减少,速度可大大加快。
电工学:第2章 电路的暂态分析

= 2.2μs
三、 RC电路的完全响应 ——uC(0-) = UO≠0
K
R
q
t=0
uR
设uC(0-) =UO
US
i
C uC
换路后, 微分方程为 方程的通解为 待定系数A为 所以
uR+ uC = US 或 Ri + uC = US RCduC/dt + uC = US uC (t)= US + Ae(-t/τ) A= U0 – US uC (t)= US + (U0 – US)e(-t/τ)
例3 零状态
设开关K闭合前,L、C均未储能
——初始储能为零 ——零初始状态 ——零状态
iC
K uC
i1
R2 10Ω
iL
t=0
R1 5Ω
uR
L uL
US 10V
uC(0-) = 0, iL(0-)= 0 ——零初始状态
零状态举例——先确定 uC 、iL
i=?
R2 10Ω
uC =0
i1=?
US 10V
第2章 电路的暂态分析
§2–1 暂态分析的基本概念
一、稳态、暂态和换路
1、稳态——电路稳定的状态 2、暂态——一种稳态→另一种稳态——过渡过程
3、换路——改变电路状态,结构或参数
4、原因——能量不能突变! R
K
q
t=0
US
C uC
uC
US
t
O
电路中的过渡过程很短暂 ——暂态过程 ——暂态分析
二、激励和响应
三、R、L、C 的 u – i 关系小结
R u = Ri L u = Ldi/dt C i = Cdu/dt
电力系统暂态稳定性分析的数学模型及其求解方法
电力系统暂态稳定性分析的数学模型及其求解方法电力系统暂态稳定性是电力系统运行中一个重要的问题,它涉及到了电力系统的可靠性和安全性。
在电力系统中,由于各种原因(如电力故障、突发负荷变化等),系统会发生暂态扰动,这会对系统的稳定性产生影响。
因此,对电力系统的暂态稳定性进行分析和求解具有重要的实际意义。
一、电力系统暂态稳定性的数学模型电力系统暂态稳定性的数学模型是对电力系统进行描述和分析的基础。
其核心是用一组偏微分方程描述电力系统的动态行为。
通常,电力系统暂态稳定性的数学模型可以分为两个方面,即电力系统的动态方程和控制方程。
1. 电力系统的动态方程电力系统的动态方程描述了电力系统各个元件(包括发电机、负荷等)的动态行为。
其中,最重要的是发电机的动态方程,其模型可以采用不同的形式,如压敏调压器模型、电压控制器模型等。
此外,还需要考虑负荷、传输线和变压器的动态方程等。
2. 电力系统的控制方程电力系统的控制方程是为了描述系统中各种控制装置的动态行为。
常见的控制方程包括励磁控制方程、电压和功率控制方程等。
这些方程描述了控制装置对电力系统的调控作用,能够稳定系统的运行。
二、电力系统暂态稳定性的求解方法为了求解电力系统的暂态稳定性问题,需要采用一些数值计算方法。
以下介绍几种常用的求解方法。
1. 时域法时域法是一种基于系统动态方程的求解方法。
它通过数值积分的方式,迭代求解系统的动态响应。
这种方法适用于电力系统的小扰动和中等扰动情况,可以得到系统的暂态过程。
2. 频域法频域法是一种基于系统频域响应的求解方法。
它可以通过系统的频率响应特性来分析系统的暂态稳定性。
常见的频域法有等效系统法、阻抗法等。
这些方法适用于长时间尺度上的电力系统分析。
3. 优化算法优化算法是一种基于优化理论的求解方法。
它通过优化问题的数学模型,寻找系统的最优运行条件,以提高电力系统的暂态稳定性。
常见的优化算法有遗传算法、粒子群算法等。
4. 强化学习算法强化学习算法是一种基于智能系统的求解方法。
微分方程电流暂态解和稳态解
微分方程电流暂态解和稳态解
微分方程在电路分析中是一个非常重要的工具。
它可以用来描
述电路中电流和电压的变化,从而帮助我们理解电路的行为。
在电
路中,我们经常需要分析电流的暂态解和稳态解,这对于设计和分
析电路至关重要。
首先,让我们来看看电流的暂态解。
在电路中,暂态解描述的
是电路中电流和电压随时间的变化。
这种变化通常是由电路中的电容、电感和电阻等元件引起的。
通过微分方程,我们可以建立描述
这些元件之间关系的方程,然后求解这些方程,得到电流随时间的
变化。
这对于分析电路在开关、脉冲等外部条件下的响应非常有用。
其次,让我们来看看电流的稳态解。
稳态解描述的是电路中电
流和电压在长时间内的稳定行为。
在稳态下,电路中的电流和电压
通常不再随时间变化,而是达到了稳定的状态。
通过微分方程,我
们可以建立描述电路稳态行为的方程,然后求解这些方程,得到电
路中电流和电压的稳定状态。
这对于设计和分析稳定工作的电路非
常重要。
总之,微分方程在电路分析中发挥着重要作用,可以帮助我们
理解电路中电流和电压的暂态和稳态行为。
通过对微分方程的求解,我们可以得到电路中电流和电压随时间的变化,以及稳定状态下的
行为,从而更好地设计和分析电路。
电路的暂态分析
电路的暂态分析电路的暂态分析指的是对电路在瞬间输入或变化时的瞬态响应进行分析。
在电路设计、故障诊断等领域都有着广泛的应用。
本文将从理论模型、暂态响应的特点以及常见的分析方法三个方面来介绍电路的暂态分析。
理论模型在进行电路的暂态分析前,需要先建立电路的理论模型。
这包括对电路的电学特性进行建模以及对电路元件的特性进行分析。
电学特性模型电路的电学特性主要包括电阻、电容、电感等基本元件的特性。
其中,电阻和电容的特性模型比较简单,可以用欧姆定律和电容充放电公式进行描述。
而对于电感元件,需要利用基尔霍夫电压定律以及利用长度为l的线圈的感性L和匝数n之间的关系公式来进行描述。
在建立电路理论模型时,还需要考虑电源特性以及信号源电压的特性。
其中,电源特性可以用理想电压源或者理想电流源进行模拟;而对于实际应用中的非理想电源,需要通过实验或者仿真获取其精确的电源特性。
元件特性分析在进行电路暂态分析时,还需要考虑不同元件的特性。
例如,对于电容元件,如果其充放电速度过快,可能会导致电容器击穿或者损坏。
而对于电感元件,由于其自身存在的电感作用,可能会对电路的瞬态响应产生影响。
因此,在电路模型建立时,需要充分考虑每个元件的特性,以便更准确地描述和分析电路。
暂态响应的特点对于电路来说,其暂态响应有着以下几个特点:瞬时响应在电路遭受瞬间输入或变化时,电路会出现瞬时响应。
在瞬间输入或变化后,电路各元件的电压和电流瞬间变化,并在一定时间内达到最终稳定状态。
频率响应与频率响应不同的是,瞬态响应表示电路在瞬间输入或变化后的响应。
在瞬间输入或变化后,电路会出现瞬变,一般在几个时间常数内达到最终稳态。
这个过程可以看做是一个低通滤波器,对于高频信号的衰减比较快。
强迫响应强迫响应是指电路的强制响应,是由于电路中有源元件的作用产生的响应。
强迫响应是由电路中的输入信号和有源元件共同确定的。
常见的分析方法在进行电路暂态响应的分析时,有多种方法可供选择。
电工学-第四章 电路的暂态分析
(2)由换路定理得: uc (0 ) uc (0 ) 4V
iL (0 ) iL (0 ) 2 A
因此,在t=0+ 瞬间,电容元件相当于一个4V 的电压源,电感元件相当于一个2A的电流源。据 此画出t=0+ 时刻的等效电路,如图3-3 (C) 所示。
可见τ等于电压uc衰减到初始值36.8%的时间 从理论上讲,电路只有经过t=∞的时间,才能达到稳定; 实际上经过5 τ就认为达到稳定. 另外,RL电路的时间常数 L / R
画出uc及i的波形如图所示。
RC 电路零输入响应 电压电流波形图
在激励作用之前,电路的初始储能为零仅由激励引起 的响应叫零状态响应。
(3)在t=0+ 电路中,应用直流电阻电路的分析方 法,可求出电路中其他电流、电压的初始值,即
4 i1 (0 ) 2 A 2 4 i 2 (0 ) 1 A 4
iC(0+)=2-2-1=-1A uL(0+)=10-3×2-4=0
例2: 电路如图3-4 (a)所示,开关S闭合前电路无储能,开 关S在 t=0时闭合,试求 i1 、i2 、i3、 uc、uL的初始值。
uC uC ()(1 e
t RC
)
t≥0
2式
由2式可知,当t=0时,uc(0)=0,当 t=τ时, uc(τ) =US(1-e–1)=63.2%US,即在零状态响应中,电容电压 上升到稳态值uc=(∞)=US的63.2%所需的时间是τ。而当t=4~5τ 时,u c上升到其稳态值US的98.17%~99.3%,一般认为充电过 程即告结束。电路中其他响应分别为
电路的暂态过程常微分方程分析
3、LCR 电路
L
C 1
R
电路图如右图所示:
2
1 当开关打到 1 时: ○
L∗ 即: L∗
2 当开关打到 2 时: ○
������������ ������ + ������������ + = ������ ������������ ������
������ 2 ������ ������������ ������ + ������ ∗ + = ������ ������������ 2 ������������ ������ ������������ ������ + ������������ + = 0 ������������ ������
L∗ 即: L∗
������ 2 ������ ������������ ������ + ������ ∗ + =0 2 ������������ ������������ ������
������ 2 ������ ������
方程的解取决于阻尼度λ =
.
利用 LCR 电路的变化性质,可用于无线电信号发射端,信号过滤,实现音箱的立体声效 果等。
三、 总结 以上讨论的三种电路的常微分解看似并不起眼, 但是它们在电子电路中却有着极其重要 的意义。
四、 参考资料 1、 吴泽华、陈治中、黄正东,浙大出版社, 《大学物理》中册; 2、 赵凯华,陈熙谋,高等教育出版社, 《电磁学》 ;
解得方程的通解为:i = ������ + C ∗ ������ −������ ������ 初值条件������0 = 0,代入得,i = (1 − ������ −������ ������ );
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
始资料:3机9节点系统图:图1支路参数:发电机参数表216.5kv3注:表中所有时间常数的单位为“S”,阻尼系数D及所有电阻、电抗均为“表幺值”。
正常运行情况下的系统潮流表:消去负荷节点的分析电路图:81.消去系统的负荷节点 计算负荷的等值阻抗:因为 2U U U zl IS SU•••===所以22,5,6,8*U U Li Li zl i i P j QS Li===-负荷对应的导纳为:21,5,6,8LiP jQyl i i ZL iU -===令用于系统潮流计算的节点导纳矩阵为Y。
暂态稳定分析中,负荷采用恒阻抗模型,将相应节点的负荷导纳值并入系统中,即修改系统中5,6,8号节点的自导纳值为:,5,6,8iiii lii yyy =+=如此,便可得到消去系统负荷节点后的节点导纳矩阵'NNY.2.系统的初值计算系统暂态稳定分析过程中需要求解微分方程,因此需要计算系统初值。
暂态稳定分析中,需用到系统运行状态变量x 和运行变量y 。
在本次系统暂态稳定分析中,发电机采用经典模型、负荷为恒阻抗模型、网络用节点导纳矩阵描述;因此,',t U x y P E θδω⎡⎤⎢⎥⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦据原始资料可知,y已知,故需要据系统原始资料求解x 。
求各发电机暂态电动势: 电路图为如下:U•由简单系统潮流计算公式得:'Q X d U U ∆= ; 'P X dU Uδ=所以''()U U j U E E δδ••=∠=+∆+用直角坐标可表示为:''x y Ux U Uy U E E δ⎡⎤∆⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦其中1'1'()()*()*;()()*()*;111d d U diag Q diag diag I U diag P diag diag I I U X U X δ--∆==⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦故可得'''''arctan()x yy xj E EE E EEδ•=+==在暂态稳定分析计算过程中,认为系统发电机的调速系统可维持原动机的输入功率不变。
即有tem P P= ,02fωπ=3.暂态稳定分析的网络方程暂态稳定计算过程中的网络代数方程与系统潮流计算时的网络代数方程有所区别,前者是由消去系统网络负荷节点的网络代数方程和发电机方程组合而成的。
用于暂态稳定分析的代数方程可以描述为:'0G GY E I-= (1)其中'E 为发电机的暂态电动势,GY为消去负荷节点和考虑发电机内节点,并消去网络中联络节点后的节点导纳矩阵,GI为发电机实际注入电流。
列写发电机方程:暂态稳定计算中,考虑励磁系统具有维持发电机暂态电抗qX后的暂态电动势'qE保持不x变的能力,并令'q qX X=,即发电机采用经典模型。
发电机用'qE表示时,按固定在发电机转子上的d,q 轴坐标来建立发电机电压平衡方程式有:''''0U E E I X q Gd dGq U I X Gq dGd ==+=-⎧⎨⎩写成矩阵形式为:'''00U E X I q dGq Gq U X I dGq Gd -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦系统潮流计算的代数方程中各节点的电压电流等相量均是以某一同步旋转轴的坐标系为基准的,今假设此坐标轴为直角坐标轴x-y 。
因此,为了便于发电机方程与网络方程的联立求解,需要将发电机d-q 坐标系下的电压平衡方程转化为x-y 坐标轴下的电压平衡方程。
同时,在暂态稳定计算过程中,可以假设系统同步旋转轴和x 轴重合,故在发电机经典模型下可以将发电机q 轴与x 轴间的夹角认为是发电机的绝对功率角δ。
坐标间的转换关系,可参照如下相量图 。
由上图可以得知故有cos sin sin cos cos sin sin cos U U Gx Gq U U Gy Gq I I Gx Gq I I Gy Gq δδδδδδδδ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦cos sin sin cos U U Gq Gx U U Gd Gy δδδδ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦因此'''0cos sin cos sin 0cos sin sin cos sin cos 0sin cos U X I dGq Gq q U X I dGq Gq E δδδδδδδδδδδδ-⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 因此'''''1100cos sin 1sin cos 1000I Gx d d Gx q I Gy Gy d d X X X X U E U δδδδ⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦''000I Gx xxx Gxx Gxq I Gy y y y Gy y Gy C U C U B B E E C UC UB B ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⇒=-=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦其中 ''''sin cos 11,,,x y x y ddddC C B B XXXXδδ--====所以'''G GG GN G U I Y E Y =- (2)在直角坐标系下的表达式为''''''000U I Gx Gx Gx GG GNU I Gy Gy Gy GGGNE E B BB B ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦-- 其中''''''''11,,,GGGG GN GN GG GN ddj j YB Y B B B XX===-=-所以''GGGNY Y=消去负荷节点后的系统网络方程为NNU I Y= (3)其中,U I 分别为系统的节点电压和节点注入电流。
联立方程(1)(2)得:''''GG GG NN GN U IU Y E I Y Y ⎧-=⎪⎨⎪=⎩ 在方程(2)中,由于已消去了网络中的负荷节点,因此可知仅仅只有连接发电机的节点才会有注入电流,且满足G I I =.因此可以将上述方程组改写为:'0GG GN NGNN I U Y Y E Y Y ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(4)其中'E 是各发电机暂态电动势组成的列向量,U 是网络中各节点电压组成的列向量。
GGGNNGNN Y Y Y Y⎡⎤⎢⎥⎣⎦是一个(3+9)⨯(3+9)的矩阵。
GG Y 是3⨯3, GN Y 是3⨯9, NG Y 是9⨯3,且有()TNGGN YY =,NNY是9⨯9.各分块矩阵的求解如下:'''123111(,,)GG d d d diag j j j X X X Y = ;'1'2'3100000000100000000100000000d GNd d j j j X YX X⎡⎤-⎢⎥⎢⎥⎢⎥-⎢⎥=⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦可知'GG GG Y Y =;GN Y 与'GG Y 的非零元素相同,只是矩阵的阶数不同。
'NN NN GG Y Y Y =+即NNY可由系统潮流计算的节点导纳矩阵Y变换而来,变换过程中只需修改对应负荷和发电机节点的自导纳值,即在系统负荷节点处并入负荷的等值导纳值,在发电机节点并入发电机的内阻抗值。
处理暂态计算过程中的网络代数方程(3)如下:''0E U I YY GG GN U Y E Y NG NN ⎧⋅+⋅=⎪⎨+⋅=⎪⋅⎩(5)(6)结合(4)、(5)消去变量U 可得:'''11()NG GG G GN NN GG GN NN NG G GE E I Y E Y Y Y Y Y Y Y ---=-=所以'1()NG GG GN NN GI E Y Y Y Y --= (7)所以比较(1)、(7)可得1G GG GN NN NG G jB Y Y Y Y Y -=-=+ (8)4.微分-代数方程电力系统暂态稳定数值计算过程实际上是求解系统的微分-代数方程,再据求解结果判断系统在受到大干扰后,能否保持系统的稳定运行。
据本次暂态稳定分析建立的数学模型可知,系统微分方程仅包括发电机转子的运动方程。
列写3机9节点系统暂态计算过程中的微分-代数方程如下:发电机转子运动方程为:0(1)J t emd dtd T dt P P δωωω⎧=-⎪⎪⎨⎪=-⎪⎩(9) 其中δ为发电机绝对功率角,2fπω=为同步角速度,式中各时间量的单位s ,其它物理量均为表幺值。
方程(9)中系统角加速度用有名值表示时10)(J em t d dt d P T P dtδωωω-⎧=∆⎪⎪⎨∆⎪=-⎪⎩ (10) 将方程(7)和(10)联立可得系统暂态计算的微分-代数方程组,即10'1)((0)J em t NG GG GN NN G d dt d P T P dt I E Y Y Y Y δωωω--⎧=∆⎪⎪∆⎪=-⎨⎪⎪--=⎪⎩(11) 上述微分-代数方程组可采用交替法求解。
暂态计算过程中,求解系统代数方程是为了求出每台发电机的电磁功率,进而可以利用数值积分法求解发电机转子运动方程,从而得出每台发电机的绝对功率角以及发电机间的功角差,最后据求解结果对系统的稳定性进行判断。
因此,在电力系统经典模型下,可以通过对系统代数方程的推导并结合发电机电磁功率计算公式,直接求出发电机的电磁功率,而不需要重复求解系统代数方程中的每一个变量,这样不仅利于优化暂态计算程序而且提高了暂态计算的求解速度。
发电机的电磁功率的计算:*'emi Gi i iijQ S P iE δ=+=∠所以'*)Re(emi i iE i P iδ=∠ (12)据系统代数方程(7)得3'13**'1,1,2,3(13)ij j i j j ij j i jj Y i i E i Y E δδ===∠=⇒=∠-∑∑将(13)代入方程(12)中得33*11321'''')()Re(Re('''(cos sin )())emi ijijij ij jj j j ij ij j j iE E P i i ij G G E E B E i j ij ii ij i j E G Y B E δδδδδ===≠=∠∠-=⋅∠=++∑∑-⋅∑式中11j G Y B ij ij ij j Z R X ijij ij=+==+, 令()()22()()j 221sin sin 1sin sin 1cos cos X B ii ii arctg arctg ii G R iiii X ij Bii arctg arctg i G R ij ij G Y ii ii ii ii Z iiG Y ij ij ij ijZ ijB Y ij ij ij ijZ ijππαππααααααα-=-=-=-=--===-=-==所以可得发电机电磁功率为32'''sin sin ),1,2,3(()1i P Y E E Y E emi ii i j ij ii ij ij i j j iδαα=+⋅-=∑=≠ (14)将(14)代入方程组(11)中,因此可得系统的微分-代数方程如下:312'''sin sin ))((()01d ii dt d i P Y E E Y E ii i j ij ii ij ti ij i dt T jj j iδωωδωαα⎧=∆⎪⎪⎪∆⎨=--⋅-∑⎪=⎪⎪≠⎩(15) 可知,系统暂态计算就是求解微分方程组(15)。