多基地声呐浮标系统的布阵设计分析
采用两种被动定位法的声纳浮标接收器基阵设计
形 基 阵 提 高 目标 定 位 精 度 。
现 代 海 战 的 重 要 样 式 之 一 。 在 反 潜 作 战 中 , 基 本 的 要 求 就 是 能 够 及 时 对 潜 艇 进 最 行 搜 索 、 发 现 、 跟 踪 , 至 消 灭 。 用 于 完 成 直 这 一 任 务 的 观 察 器 材 很 多 , 雷 达 、光 电 l和 0 2, 根 据 三 角 关 系 , 目标 S的 坐 标 公 如 设备 、声 纳 、 声 纳浮 标 、磁 探 仪 等 等 。其 式 为 : 中 , 纳 浮 标 是 一 种 效 果 好 、 受 地 域 限 制 声 一 + 小 、 使 用 方 便 的 探 潜 设 备 , 受 各 国 军 方 备
其 中 d是 两 个 阵 元 之 间 的 距 离 。 单 站 纯 方 位 被 动 定 位 方 法 需 要 解 决 的 关 键 问 题
是 目 标 的 方 位 信 息 , 可 以 利 用 水 下 目 标 测 向 方 法 进 行 解 决 。 目 前 通 常 采 用 矢 量 水 听 器 测 量 声 压 和 振 速 , 进 行 水 下 目 标 的 定 向
・
数 字技 术 ・
采用两种被 动定位法的声纳浮标接收器基 阵设计
瞿 东 辉 谢 彦 宏
( 0 5部队教研 部 辽 宁 葫 芦 岛 1 5 01 91 6 20 )
【 摘 要 】 矢 量 水 听 器 的 三 元 纯 方 位 被 动 定 位 和 测 时 差 被 动 定 位 两 种 方 法 为 基 础 , 针 对 算 法 特 点 和 声 纳 浮 标 的 使 用 特 点 , 分 别 设 以 计 了两种 方法 所 采 用 的 水 下换 能 器 基 阵 结 构 两 种 基 阵 结 构相 似 ,部 分 重 合 ,可 根 据 实 际 工作 条 件 任 意选 择 算 法 ,也 可两 种 算 法 相 互 间 自行 切 换 。此 种 相 互 补 偿 的 设 计 可 以提 高 水 下 目标 被 动 定 位 的 精 度 和 可 靠 性 。 【 关键词 】 声纳浮 标 被 动定位 纯方 位 测时差 [ 中图分 类号] 9 5 E 2 【 文献标识码】 A 【 文章编 号】0 7 4 6 ( 0 0 4 0 2 — 2 1 0 -9 1 2 1 )0 — 0 6 0
声呐浮标技术及其发展方向

声呐浮标技术及其发展⽅向航空反潜是最有效的反潜作战⼿段之⼀[1]。
⽬前装备反潜飞机的航空声呐设备主要有吊放声呐和各种声呐浮标。
前者主要⽤于直升机和⽔上飞机,后者主要⽤于固定翼反潜巡逻机,也可以⽤于反潜直升机。
现代新型的安静型潜艇的噪声级已降到海洋环境噪声级的⽔平,从⽽使常规的被动声探测很难发现隐⾝潜艇⽬标,对低速潜艇的被动探测距离已从数百公⾥下降到⼏公⾥。
同时新型潜艇采⽤敷设消声⽡等隐⾝⼿段对抗回⾳探测也取得了显著的成效。
⼤型核潜艇重点部位的消声⽡可厚达1.5m,吸声效率达80%以上。
常规的中⾼频主动声呐已很难探测到声隐⾝潜艇的回波。
除此以外,声纳浮标的使⽤环境转向浅⽔⾼噪声区,并要适应信息化作战的要求。
⾯对这样的挑战,航空声呐,包括声呐浮标,也必须采取有效的变⾰性对策才能保证探潜任务的完成。
1声呐浮标系统⼯作原理声呐浮标系统的原理框图见图1。
它由各型声呐浮标(包括储存架、投放装置)、浮标⽆线电接收机、浮标定位仪(或声参系统)、信号处理机、显控台等组成。
⽆线电接收机⽤来接收浮标发射回来的⽆线电信号,对其解调,产⽣⾳频信号送往信号处理机进⾏处理。
现代的接收机都是多通道的,可以同时接收多路信号,常⽤的有8、16、32、64通道等多种配置。
声呐浮标参考系统是⽤来测定声呐浮标位置。
信号处理机的作⽤是将浮标发回的声数据进⾏与浮标类型相应的处理,解算并提取信号的各种特征供声呐员对⽬标检测和分类,信号处理机还可完成⽬标位置的解算,形成相应的战术数据,供显控台显⽰。
显控台是⼈机交互界⾯设备。
声呐浮标种类较多,主要分主动和被动两⼤类。
⼀般初始探测时主要使⽤被动浮标,由于被动全向浮标最廉价,使⽤的最多。
先进国家趋向于使⽤被动定向浮标,虽然其价格较⾼,但性能好,只要较少数量就可实现较多的被动全向浮标才能完成的功能,进⼊攻击阶段再使⽤主动浮标对⽬标精确定位。
⼤多数浮标的⼯作参数都是投放前⼈⼯设定的,⽐较先进的则可以在浮标投放后,根据需要遥控设定。
反潜巡逻机声呐浮标巡逻搜索标准线列阵及布阵方法
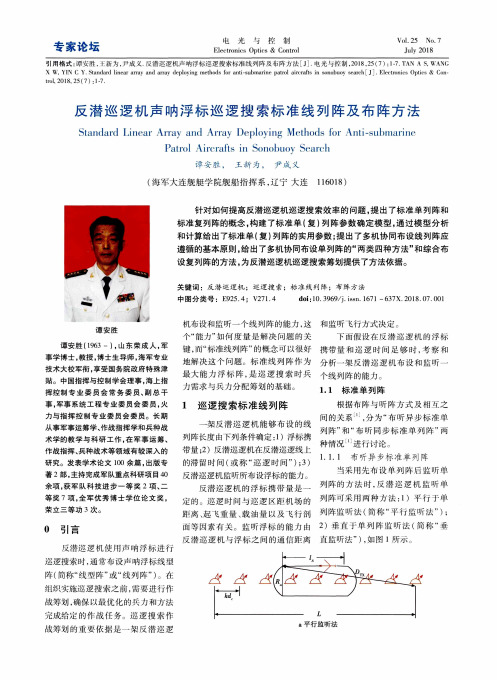
图 1 布听异步标准单列阵分析示意图
(海 军 大连 舰艇 学 院舰船 指挥 系 ,辽 宁 大 连 1 16018)
针对如 何提 高反潜巡逻机 巡逻搜 索效率 的 问题 。提 出了标 准单 列 阵和 标准 复列阵的概 念 ,构建 了标 准单 (复 )列 阵参 数确 定模 型 ,通过 模型 分 析 和计算 给 出了标 准单 (复 )列 阵的实用参数 ;提 出了多机 协 同布设 线列 阵应 遵循 的基 本原则 ,给 出 了多机 协 同布设 单列阵 的“两类 四种方 法 ”和综合 布 设复 列阵的方 法 ,为反潜巡逻 机巡逻搜 索筹划提供 了方法依据 。
最大 能力 浮标 阵 ,是 巡逻 搜 索 时 兵 个线列阵 的能力 。
力需求 与兵 力分配筹划的基础 。
1.1 标 准单 列阵
事 ,军事系统 工程专 业委员 会委 员 ,火 1 巡 逻 搜 索 标 准 线 列 阵
根据布阵 与听 阵方式 及 相互之
力 与指 挥 控 制 专 业 委 员 会 委 员 。 长 期 从 事 军 事 运 筹 学 、作 战 指 挥 学 和 兵 种 战 术 学 的教 学 与 科 研 工 作 ,在 军 事 运 筹 、 作 战指 挥 、兵种 战术 等 领 域 有 较 深 入 的 研 究。 发 表 学 术 论 文 100余 篇 。出 版 专 著 2部 ,主持完成军队重点科研项 目40 余 项 ,获 军 队科 技 进 步 一 等 奖 2项 、二 等 奖 7项 。全军 优秀博 士学位论 文 奖。 荣 立 三 等 功 3次 。
反潜巡逻机 监听所布设浮标 的能力。
当采用先布 没 单列阵 后监 听单
反潜 巡 逻 机 的 浮 标 携 带 量 是 一 列阵 的方 法 时 ,反潜 巡 逻 机监 听单
声呐浮标的关键结构设计

2020年第 3 期 声学与电子工程 总第 139 期声呐浮标的关键结构设计程浩(第七一五研究所,杭州,310023)摘要 介绍了声呐浮标组成、工作状态和总体布局,有助于相关领域的技术人员快速了解声呐浮标,同时,研究了声呐浮标关键结构设计的方法,形成了声呐浮标结构设计模块化知识,对开展新型声呐浮标结构设计具有一定的借鉴意义。
关键词 声呐浮标;漂浮气囊;定深装置;结构设计声呐浮标(下文简称浮标)主要装备于反潜飞机,它与机载声呐处理系统一起,依据水下目标在海洋环境条件下的特征,对目标进行搜索、识别、定位和跟踪,并为攻潜武器的使用提供目标指示,是航空搜潜的主要手段。
浮标具有系列化的标准尺寸、体积小、重量轻、接口简单、互换性好且使用灵活,便于与其它搜潜装备开展协同探测[1-2]。
1浮标组成及工作状态1.1浮标组件浮标具有标准的外形尺寸[3],A尺寸长914 mm,G尺寸长419 mm,F尺寸长为304 mm,外径均为124 mm。
浮标一般由外壳组件、减速降落机构、水面漂浮组件、水中悬浮组件和水下声学组件组成。
其中,外壳组件将其各部分封装在一起形成有机整体。
浮标的实体组成如图1所示,这些模块化的零部件具有良好的继承性、通用性和扩展性,可以根据浮标类型,选取相应模块进行组合。
图1 声呐浮标实体组成1.2浮标工作状态浮标一般由反潜飞机空投使用,离机后在减速降落机构的作用下,姿态调整至稳定状态下落;浮标接触水面时,充气装置对漂浮气囊充气,膨胀的漂浮气囊迫使浮标分解,水面漂浮组件上浮至海面,水中悬浮组件定深并释放传输电缆,水下声学组件下沉至预设深度并展开换能器基阵。
浮标开始工作,接收目标辐射噪声或者发射声脉冲并接收回波信号,同时接收其它声呐设备发射的声波经目标反射而产生的回波信号;接收的水声信号经过放大、滤波等处理,调制成高频信号,经漂浮气囊内置的高频天线向接收设备传输;浮标可以实时接收遥控指令执行相关动作,完成使命后自沉海底。
声呐浮标多基地探测综合效能分析方法研究

声呐浮标多基地探测综合效能分析方法研究
陈立纲
【期刊名称】《声学与电子工程》
【年(卷),期】2022()2
【摘要】为指导声呐浮标多基地探测的作战使用,提供浮标布阵优化的理论支持,文章提出了一种浮标多基地探测的综合效能分析方法。
从浮标阵的探测覆盖面积、经济费用等因素衡量浮标阵的综合效能,并据此对4种假定阵型开展仿真效能评估,分析浮标阵型在不同布阵间距、声源浮标-扩展阵浮标配置比情况下的综合效能,初步形成了兼顾浮标阵搜索范围、经济费用等多重因素的效能评估方法。
【总页数】4页(P7-9)
【作者】陈立纲
【作者单位】海装驻杭州地区军事代表室
【正文语种】中文
【中图分类】P71
【相关文献】
1.声呐浮标网络区域阵形搜潜效能分析
2.基于反潜直升机平台的吊放声呐与浮标多基地模式应召搜潜概率仿真研究
3.基于北斗系统的多基地声呐浮标阵对潜定位性能研究
4.基于北斗系统的多基地声呐浮标阵对潜定位性能研究
5.多基地声呐浮标系统的布阵设计分析
因版权原因,仅展示原文概要,查看原文内容请购买。
声呐浮标测试系统设计与实现

反潜巡逻线中声纳浮标的作战使用与搜潜方法

火 力 与 指 挥 控 制
FieCo to r n r l& Co ma dCo to m n nrl
第 3 6卷 第 9期 21 0 1年 9月
文 章 编 号 :0 2 0 4 2 1 ) 9 0 1 — 3 1 0 — 6 0( 0 1 0 — 1 2 0
中 图 分 类 号 : B 6 ; 6 . T 5 6 U6 6 7 文 献 标 识码 : A
Us ng a t c i n M e h d f S no u y i i nd De e to t o s o o b o n S a c ng S bm a i t Be t e r hi u r ne a a
多 , 中 最 重 要 的 是 发 现 概 率 。 主 要 研 究 了使 用 声 纳 浮 标 在 巡 逻 线 搜 索 时 的 浮 标 阵 的 布设 方 法 和 布 阵 要 素 , 论 了发 现 可 疑 其 讨 信 号 后 对 接 触 进 行 识 别 时 的浮 标 布 设 模 型 , 分 析 了 浮标 间距 对 巡 逻 线 搜 潜 的影 响 , 作 战 中 布设 浮 标 阵 有 一 定 参 考 意 义 。 并 对 关 键 词 : 空 搜 潜 , 现 概 率 , 纳 浮 标 航 发 声
CHEN n —e g,U in b Z AO ig Qi g fn J Ja — o, H M n
( v lAe o a t a n to a tc lUn v r i Na a r n u i la d Asr n u ia i e st c y,Y n a 6 0 1 Ch n ) a t i2 4 0 , i a
Ab t a t s o o s a k n fe f c i s r c : on bu y i i d o fe tve,ltl i ie t e o n on ni n qu p e o de e t ite lm t d wih r gi n a d c ve e te i m ntt t c s ubma i e. l to a t r h l on i e e h n us n o bu ba k t e r h s rn A o f f c o ss ou d be c s d r d w e i g s no ov l o s a c ubma i rne,t he mos t i p t nt a t r s m or a f c o i de e to p o a lt t c i n r b biiy. Thi pa e r s a c e t me h ds n e s nta f c o s s p r e e r h s he t o a d s e i l a t r on ar a i oy— r y wh n u i o obu y a a nd dic un s t a tn o lof b y— r a r ng ng Bu , Ar a e sng s n o t be t a s o t he c s i g m de uo * r y whe a n s ome u p cou sgn l we e s s i i s i a s r de e t d. t c e The a e a l s s he nfu nc of p p r na y e t i l e e Buo i t r a o d e t y—n e v l n et c pr ba lt o biiy,t s e uls a e sg fc ntf r c s i o a r y a a . he e r s t r i nii a o a tng bu y- r a tbe t Ke r s: ibo ne s a c i g s bma i de e ton pr b iiy, o bu y wo d ar r e r h n u rne, t c i o ab lt s no oy
声呐浮标结构方案设计
声呐浮标结构方案设计
黄洪石
【期刊名称】《声学与电子工程》
【年(卷),期】2000()2
【摘要】简述了国外声呐浮标常用的三种典型结构,比较了其原理及优缺点,在此基础上介绍一种实用的气瓶方案的设计特点。
【总页数】4页(P30-33)
【关键词】声呐;浮标;结构;设计
【作者】黄洪石
【作者单位】第七一五研究所
【正文语种】中文
【中图分类】U666.7
【相关文献】
1.机载声呐浮标和吊放声呐 [J], 蓉竹
2.声呐浮标的关键结构设计 [J], 程浩
3.一种应用于航空声呐浮标的磁罗盘设计 [J], 张艳艳
4.声呐浮标电缆自动化表面粗化设备的设计与验证 [J], 杨茂祥;陈卫华
5.自主飞行声呐浮标关键技术及作战样式分析 [J], 孙宁;马沙沙
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多基地声呐浮标系统的布阵设计分析作者:龙露莹赵海潮李迪来源:《声学与电子工程》2022年第01期摘要為了研究多基地声呐浮标系统的探测性能,文章采用跟踪起始概率作为目标的检测概率,以多基地集中式探测模式为例,分析了声呐浮标阵的布阵阵型因素对声呐探测面积的影响。
研究表明,在多基地声呐系统的收发合置方式下,三角形合置布局的探测面积是大于四边形和六边形的。
而在收发分置的多基地系统中,除了三角形布局外,其余的四边形布局、六边形布局、菱形和棋盘格形布局的探测性能均优于收发合置布局,这体现了收发分置的多基地声呐系统探测性能的优异性。
其中,菱形布局的每个声源的探测面积最大,优势显著。
结合声呐浮标多基地探测系统的构建机动灵活这一特性,文章研究结果可以为反潜作战过程中的声呐浮标布阵设计提供理论参考,从而提升声呐浮标的探测性能。
关键词声呐浮标;多基地声呐;探测面积;跟踪起始概率航空声呐浮标系统具有布设范围广、搜索速度快、灵活机动等优点,是水下目标的重要威胁。
声呐浮标通过飞机布放,配置灵活,有利于构建不同的形态。
为了提高现有航空装备的搜潜能力,结合声呐浮标节点布置灵活这一特点,采用多基地声呐浮标探测系统是一个有效的方法。
多基地声呐浮标探测系统一般由声呐浮标及信号处理系统组成。
该探测系统利用声源浮标发射信号,用多枚接收浮标采集潜艇的回声信号,用机载声呐浮标处理系统接收并处理浮标信号,进而实现探测、定位、显示等功能。
声呐浮标处理系统还可获取浮标位置信息,与浮标自定位信息综合处理后,构建持续、稳定的浮标阵态势[31。
本文以多基地声呐浮标系统为例,通过研究声呐浮标阵的不同布放方式对探测能力的影响,从而为声呐浮标的布阵设计提供理论支持,提高航空搜潜系统的探测能力。
1理论模型声呐探测概率模型是由声呐的ROC(Receiver Operating Characteristic )曲线确定的。
根据声呐的作用距离R,给出不同目标距离R处的声呐探测概率P(R)。
其中最简单的单基地声呐探测概率函数为1.1主动声呐探测概率模型声呐探测概率模型是由声呐的ROC(ReceiverOperating Characteristic)曲线确定的。
根据声呐的作用距离R,给出不同目标距离R处的声呐探测概率P(R)。
其中最简单的单基地声呐探测概率函数为式中,R为探测距离,R为参考距离。
在实际研究中,通常采用费米函数(Fermi function )近似声呐探测概率函数以提高计算效率4:式中,b为扩散系数,用于表述探测概率过渡区域的宽度;R为主动声呐盲区宽度。
Fermi 模型的检测概率随距离变化的曲线如图1所示。
由图可知,Fermi 模型随扩散系数b增加而下降变缓。
Fermi 模型中,选择合适的b可使P在R附近快速下降,实现模拟检测概率随距离剧烈变化的规律。
多基地声呐的探测概率模型是在单基地声呐探测概率模型的基础上,计算目标的等效距离R,进而采用等效距离R作为与单基地模型中距离R对应的参数。
具体来说,根据声呐方程中的传播损失,我们可以将单基地的探测距离与多基地的探测距离联系起来。
忽略吸收损失时,单基地声呐的传播损失为多基地声呐的传播损失为很明显,通过引入一个目标等效距离R,可以令上述两项传播损失相等,多基地的目标等效距离为式中,Rt和R分别为目标到发射基地、接收基地的距离。
1.2声呐浮标多基地系统的探测模型主动声呐在实际应用过程中往往要进行多次探测。
衡量声呐浮标阵探测能力时,多次探测后的跟踪起始概率可作为度量的重要指标。
对于声呐浮标系统来说,跟踪起始概率由跟踪起始规则决定,通常被定义为在给定连续探测次数下,完成有效检测的次数不低于最小值时的概率。
本文中,我们考虑这样一个跟踪起始规则:如果在u个连续的机会中至少有v个检测,就确认出现目标回波。
实际应用时,我们一般确定跟踪起始规则为“5中3”。
跟踪起始概率P是某处的声呐在每次ping5次后开始跟踪的概率,我们考虑多基地分布式和多基地集中式两种不同的声呐探测模式。
多基地分布式:现场的每个接收机处理来自任何声源的回波,而不仅仅是它自己的。
组网内不同单元的声源与接收机配合工作,各个接收机根据自身检测结果进行判决。
多基地集中式:组网内不同单元的声源与接收机配合工作,各个接收机不直接判决是否开始跟踪,而是将检测信息传到网络中心,由网络中心汇总信息后再进行判决。
在衡量多基地探测性能时,我们以跟踪起始概率作为评价准则,采用探测面积作为衡量指标。
为实现稳定的跟踪,要求浮标阵的探测概率都大于50%,此时使得浮标阵的覆盖区域最大化的即为优化阵形。
故在计算探测面积时,我们采用探测概率>0.5时的探测面积,同时在保证探测空间中没有间隔的情况下得到最大的声呐间距,仿真计算探测面积进而比较不同布阵阵型下多基地系统探测性能的优劣。
以多基地集中式为例,采用Fermi 模型进行仿真,扩散系数b=0.5。
图2、3的横纵坐标表示距离,Ro为参考距离。
图2中的黑线即为探测概率为0.5的轮廓线,图2(a)显示了探测空间无间隔的情况,声呐间距取1.2R0;图2(b)是有间隔的情况,声呐间距为1.3R0。
声呐浮标的布阵阵型以四边形为例,采取收发合置的方式,我们比较多基地分布式和多基地集中式的探测面积。
仿真采用Fermi 模型,扩散系数b=0.5,声呐间距为0.9R,采用多基地分布式和多基地集中式两种探测模型的探测面积如图3所示。
由图3可以看出,多基地集中式的探测面积比多基地分布式的要大,这意味着多基地集中式的探测性能更优异。
我们用多基地集中式这种探测模式来进行分析。
假设发射声源和接收器的个数分别为M和N,则多基地集中式的跟踪起始检测概率计算方法为P=1-P(0)-P(1)-P(2)-B(2)-P(2)-P(2)(6)式中,P(0)、P(1)分别表示恰好检测到0次和1次的概率,P(2)表示成功检测2次来自同一对声源和接收器的概率,P(2)表示2次检测来自同一声源但是不同接收器的概率,P(2)表示2次检测来自相同的接收器但是声源是不同的概率,P(2)表示2次检测的声源和接收器均不同的概率。
2阵型对声呐浮标多基地系统的影响2.1声呐浮标多基地系统的布阵阵型对于声呐浮标来说,为达到良好的搜索效能,必须要在海区内布设浮标阵。
以多基地中心式探测模式为例,研究不同阵型对多基地声呐系统探测能力的影响。
收发合置方式中,声呐阵型布置为三角形、四边形和六边形这三种典型分布,如图4(a)、(c)、(e)所示。
图4中的五角星表示发射声源,圆形表示接收机,实心五角星表示声源和接收机布置在同一位置,实線围成的图形表示不同阵型中一个单元格的示意图。
而在多基地声呐系统中,声源和接收机往往是分置的,具有机动灵活,隐蔽性强的优点,布阵阵型仍为三角形、四边形、六边形、菱形与棋盘格形,具体示意图如图4(b)、(d)、(f)、(g)、(h)所示。
2.2仿真研究采用费米函数模型,取扩散系数b为0.1和0.5这两种典型情况,对图4中的各个阵型进行仿真研究,从而比较不同声呐阵型因素对多基地声呐系统探测面积的影响。
其中在探测空间中无间隔的情况下得到最大的声呐间距,仿真计算探测概率大于50%的探测覆盖面积,汇总面积如图5所示。
从图中可以看出,对收发合置的布局来说,三角形阵型的探测性能是优于四边形和六边形的。
而与其对应的独立布局(收发分置,各声源处无额外的接收机)相比,四边形和六边形的探测面积均大于对应的收发合置布局,但三角形布局的探测面积小于合置布局的探测面积。
这一结论可以根据图4中的几何性质来进行分析。
当接收机的间距相同时,图4 (a)中的三角形布局的单元格面积是图4(b)中三角形合置布局的两倍。
与此同时,四边形和六边形布局的单元格面积均大于或等于其对应的合置布局。
因此,在这3种布局中,三角形独立布局(各声源处无额外的接收器)是唯一比其对应的合置布局的探测性能更好的布局。
这也表现了多基地声呐系统收发分置的优异性。
比较图5中的蓝色和黄色条形,发现在各声源处配置额外的接收器的探测面积总是大于没有接收器的。
通过综合比较,图5中的三角形合置、四边形合置、六边形合置、三角形、四边形、六边形、菱形和棋盘格形这8种声呐浮标布阵阵型中,菱形的每个声源的探测面积明显更大。
这说明,菱形这种布局有利于提升声呐浮标的探测性能,可以为实践中的声呐浮标布阵阵型的选择提供理论参考。
3结论本文以多基地声呐浮标探测系统为例,采用多基地集中式探测模型,研究了声呐浮标阵的不同布局对声呐探测面积的影响。
多基地收发合置和多基地收发分置方式比较结果显示,收发分置的多基地声呐系统探测性能优异。
同时研究表明,在文中的几种布阵方式中,菱形的探测面积最大。
在实际作战中,通过充分利用多基地声呐浮标探测的机动灵活性,选择表现较好的声呐浮标布阵形式如菱形,可以有效提高声呐浮标的探测性能。
参考文献:[1]孙明太.航空反潜战术[M].北京:军事科学出版社,2003.[2]罗木生,侯学隆,张毅.航空搜潜建模与仿真[M].国防工业出版社,2021.[3]张颜岭,陶智.机载声呐浮标处理系统设计[J].声学与电子工程,2020,(3):7-11.[4]李迪,赵海潮,张颜岭.基于TAP目标强度模型的浮标双基地探测研究[J].声学与电子工程,2020,(3):12-15.[5] FEWELL M P, OZOLs s. Simple detection-performanceanalysis of multistatic sonar for anti-submarine warfare[R].Edinburgh, South Australia: Defence Science and TechnologyOrganisation, 2011.[6]OZOLS S,FEWELL M P. On the design of multuistaticsonobuoy fields for arca search[R]. Edinburgh,SouthAustralia: Defence Science and Technology Organisation,2011.。