飞行控制系统大作业
飞行控制系统大作业
《飞行控制系统》课程实验报告班级 0314102学号 ********* 姓名孙旭东成绩南京航空航天大学2017年4月(一)飞机纵向飞行控制系统的设计与仿真1、分析飞机纵向动力学模态,求飞机的长周期与短周期阻尼与自然频率。
在MATLAB环境下导入数据文件,输入damp(alon),得出结果:Eigenvalue Damping Freq. (rad/s)-2.29e+000 + 4.10e+000i 4.88e-001 4.69e+000-2.29e+000 - 4.10e+000i 4.88e-001 4.69e+000-3.16e-002 1.00e+000 3.16e-002-7.30e-003 + 3.35e-002i 2.13e-001 3.42e-002-7.30e-003 - 3.35e-002i 2.13e-001 3.42e-002长周期的根为 -7.30e-003 + 3.35e-002i 和 -7.30e-003 - 3.35e-002i阻尼为 2.13e-001自然频率为 3.42e-002(rad/s)短周期的根为 -2.29e+000 + 4.10e+000i 和 -2.29e+000 - 4.10e+000i阻尼为 4.88e-001自然频率为 4.69e+000(rad/s)2、对升降舵及油门单位阶跃输入下的飞机自然特性进行仿真,画出相应的状态曲线。
sys=ss(alon,blon,clon,dlon)[y,t]=step(sys,500)subplot(221)plot(t,y(:,1,1))xlabel('t(s)')ylabel('\Deltau(m/s)')subplot(222)plot(t,y(:,1,2))xlabel('t(s)')ylabel('\Deltau(m/s)')subplot(223)plot(t,y(:,2,1))xlabel('t(s)')ylabel('\Delta\alpha(deg)')subplot(224)plot(t,y(:,2,2))xlabel('t(s)')ylabel('\Delta\alpha(deg)')200400600-10-505t(s)∆q (d e g /s )200400600-4-2024t(s)∆q (d e g /s )200400600-150-100-50050t(s)∆θ(d e g )0200400600-50050100t(s)∆θ(d e g )200400600-2000200400t(s)∆u (m /s )0200400600-6-4-2t(s)∆α(d e g )200400600-2000200400t(s)∆u (m /s )0200400600-2024t(s)∆α(d e g )subplot(221) plot(t,y(:,3,1)) xlabel('t(s)')ylabel('\Deltaq(deg/s)') subplot(222) plot(t,y(:,3,2)) xlabel('t(s)')ylabel('\Deltaq(deg/s)') subplot(223) plot(t,y(:,4,1)) xlabel('t(s)')ylabel('\Delta\theta(deg)') subplot(224) plot(t,y(:,4,2)) xlabel('t(s)')ylabel('\Delta\theta(deg)')subplot(121) plot(t,y(:,5,1)) xlabel('t(s)')ylabel('\Deltah(m)') subplot(122) plot(t,y(:,5,2)) xlabel('t(s)')ylabel('\Deltah(m)')2004006004t(s)∆h (m )200400600-2.5-2-1.5-1-0.54t(s)∆h (m )以上各图为升降舵及油门单位阶跃输入下的飞机自然特性行仿真,左边一列为升降舵的阶跃输入,右边一列为油门的阶跃输入。
飞控大作业(蔡云鹏)
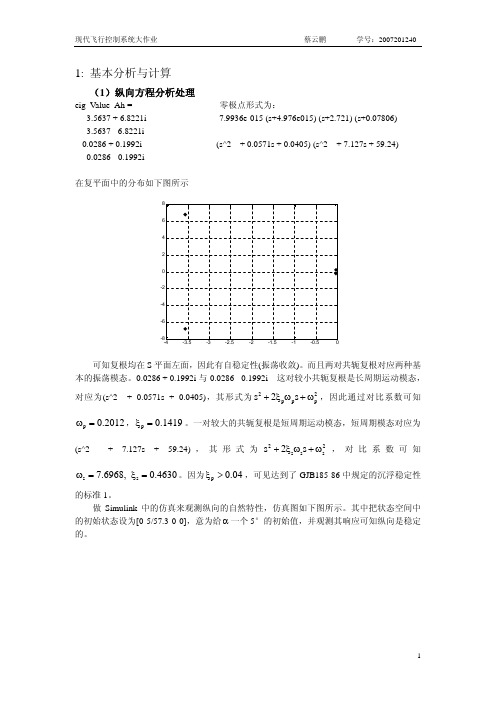
1: 基本分析与计算(1)纵向方程分析处理eig_Value_Ah = 零极点形式为: -3.5637 + 6.8221i -7.9936e-015 (s+4.976e015) (s+2.721) (s+0.07806) -3.5637 - 6.8221i ---------------------------------------------------------------------- -0.0286 + 0.1992i (s^2 + 0.0571s + 0.0405) (s^2 + 7.127s + 59.24) -0.0286 - 0.1992i在复平面中的分布如下图所示可知复根均在S 平面左面,因此有自稳定性(振荡收敛)。
而且两对共轭复根对应两种基本的振荡模态。
-0.0286 + 0.1992i 与-0.0286 - 0.1992i 这对较小共轭复根是长周期运动模态,对应为(s^2 + 0.0571s + 0.0405),其形式为22p p s 2s p +ξω+ω,因此通过对比系数可知,。
一对较大的共轭复根是短周期运动模态,短周期模态对应为p 0.2012ω=p 0.1419ξ=(s^2 + 7.127s + 59.24),其形式为2s s s s 2s 2+ξω+ω,对比系数可知。
因为s s 7.6968, 0.4630ω=ξ=p 0.04ξ>,可见达到了GJB185-86中规定的沉浮稳定性的标准1。
做Simulink 中的仿真来观测纵向的自然特性,仿真图如下图所示。
其中把状态空间中的初始状态设为[0 5/57.3 0 0],意为给α一个5°的初始值,并观测其响应可知纵向是稳定的。
上图中右图是空速V 的响应,左图是迎角α的响应。
可以看出其纵向自然特性是随着时间而自稳定的。
在讨论纵向操纵性时,给定升降舵偏角一个幅值为5=°e δ,宽度为1秒的一个脉冲,其中脉冲可用signal builder 来构造,Simulink 框图和各状态变量的响应的输出如下图所示:Vαqθ可见,,,V q αθ在升降舵受到脉冲干扰后,其均随时间而收敛,其中空速V 和仰俯角θ的变换范围较大,其稳定所需时间较长。
简单飞行器设计大作业
简单飞行器设计大作业
**一、设计目标**
本次设计的目标是设计一个简单的飞行器,能够在空中稳定飞行,并具备一定的操控性能。
**二、设计要求**
1. 飞行器能够安全起飞和降落。
2. 具备简单的航向控制能力。
3. 能够在空中稳定飞行一段时间。
**三、设计方案**
1. 飞行器整体采用轻量化材料制作,以减小重量,提高飞行效率。
2. 采用电动马达作为动力源,驱动螺旋桨产生升力。
3. 飞行器的控制系统采用遥控器进行控制,通过调整马达的转速实现飞行器的升降和航向控制。
**四、技术实现**
1. 选择合适的材料制作飞行器的机架和外壳。
2. 安装电动马达和螺旋桨,并进行动力系统的调试。
3. 设计并制作遥控器,实现对飞行器的远程控制。
4. 进行飞行测试,对飞行器的性能进行评估和优化。
**五、总结与展望**
通过本次简单飞行器设计大作业,我们初步掌握了飞行器设计的基本流程和方法。
在未来的工作中,可以进一步优化飞行器的设计,提高其性能和可靠性,为实际应用提供更好的解决方案。
以上示例仅供参考,你可以根据具体的设计要求和实际情况进行修改和完善。
直升机显模型跟踪控制与仿真--直升机控制系统大作业

南京航空航天大学直升机控制系统大作业题目直升机显模型跟踪控制与仿真学生姓名Xx学号xxx学院xxx专业xxx指导教师xxx二〇一七年六月第一章 小型直升机的建模小型无人直升机要实现控制,首先要对小型直升机进行模型的建立,建立准确的模型能够简化直升机的设计的流程,缩短设计时间,大大提高设计的效率,而且对于仿真来说,是不需要成本的,这也大大减少了硬件调试时由于控制律的不合适导致的直升机的坠毁的情况。
基于准确的模型,设计出来的控制律,能够非常不错的用在实际的小型无人直升机上,大大缩短了调试时间。
1.1小型无人直升机建模方法简介小型直升机的模型表现为高阶非线性、非对称非定常等特点,而且很多参数很难通过仪器测量得到,而且与大型有人直升机相比,稳定性较差,抗干扰能力比较弱,因此建立小型直升机的模型非常困难,如今小型无人直升机的建模应用最广的方法主要为两种,分别为原理建模法和系统辨识法。
本文采用原理建模法。
原理建模法是将直升机分为主旋翼、机身、尾桨等部分,并对各部分进行动力学分析,从而获得各部分的动力学模型,然后建立位置,姿态,控制量之间的非线性方程组,获得比较精确地模型。
在某个平衡位置,要获得小型无人直升机的线性方程,可以对小型无人直升机的非线性模型进行线性化。
由于原理建模法是从小型无人直升机本身的动力学特性出发,因此适合直升机全包线飞行设计。
相对于系统辨识法来说,原理建模法比较复杂,建立的方程阶数比较高,而且很多参数获得比较困难,但是对于直升机建模来说,它有它自己独特的优势,仍然是无可替代的,比如随着时代的发展,人们对小型直升机的性能要求也越来越高,一些超机动的飞行动作,采用系统辨识法就很困难,因为一些超机动飞行操纵起来很困难,而且很危险,这时候就需要采用原理建模法。
1.2小型直升机模型的建立1.2.1坐标系在忽略弹性变形的情况下,小型直升机为六自由的刚体,选择合适的坐标系可以简化对直升机的研究,并且可以使对直升机的描述更简单准确。
飞控大作业
现代飞行控制系统控制作业一、飞机的建模、配平与线性化1.1飞机的建模以现有的飞机六自由度模型为基础,使用S函数编写飞机气动力、发动机推力以及重力的力和力矩,空气密度 由Matlab中的 ISA Atomsphere Model,利用高度来计算。
模型主要有五大部分,一是空气密度模块,由simulink提供。
气动力、发动机推力和重力模块都是用s函数编写得到的。
使用edit sfuntmpl命令即可调用MATLAB自带的s函数的模板,修改其中部分就可以得到相应功能的s 函数模块。
此飞机模型包括六个输入(deltaF = 0):[deltaE deltaA deltaR deltaF n pz],12个状态: [V alpha beta p q r phi theta psi xe ye H]。
1.2 飞机的配平与线性化配平是通过调整各舵面默认角度来达到使飞机平稳飞机/保持某状态的目的。
飞机配平一个是俯仰配平,一个是副翼配平。
俯仰配平包括安定面配平、速度配平、马赫配平。
人工配平有人工电气配平、人工备用配平。
自动配平是衔接自动驾驶以后由FCC控制的配平,包括升降舵伺服系统来进行俯仰配平,有的机型叫自动驾驶配平。
在速度为50m/s,高度为3000m的初始条件下进行配平。
然后得到飞机的线性化矩阵,以及纵向和横侧向的矩阵。
线性化矩阵A B C D如下:CD横向矩阵A-lateralB-lateralC-lateralD-lateral纵向矩阵AhBhChDh二、 飞机特性分析2.1 特征根的求解由线性化方程可以很容易求出纵向和横侧向的特征根,如下:纵向-2.8775 + 2.5588i -2.8775 - 2.5588i -0.0164 + 0.2223i -0.0164 - 0.2223i特征根全部在负半平面,纵向是稳定的。
横侧向0.0000 + 0.0000i 0.0000 + 0.0000i -0.0267 + 0.8539i -0.0267 - 0.8539i横侧向有两个零根,所以横侧向是不稳定的。
飞行方案大作业(1)
[键入文档标题][键入作者姓名]2015300464第一部分飞行方案1、方案飞行2、弹道设计3、卫星摄动与机动第三部分卫星的摄动与机动第二部分弹道设计飞行方案大作业一、 问题描述在已知导弹质量、转动惯量、发动机推力等参数的情况下,导弹分为三个飞行方案,即三个阶段飞行。
阶段一:飞行距离在9100x m <,采用追踪法,其中方案高度与距离的关系、方案弹道倾角与高度的关系如下:***2000cos(0.000314 1.1)5000(-)+(-)z H x k H H k H H ϕϕδ=⨯⨯⨯+=⨯⨯ (1)阶段二:飞行距离在240009100m x m >>,采用追踪法,其中方案高度与距离的关系、方案弹道倾角与高度的关系、导弹因燃料消耗而质量改变参数如下:**3050(-)+z H mk H H k H ϕϕδ== (2)0.46/s m kg s = (3)阶段三:飞行方案24000&&0x m y >>,而最终目标位置为30000m x m = 采用比例导引法**00**sin sin tan ()(-)+()θθηηθθθδθθθθ=⨯--=-=-=-=-m T T Tm T mz dq r V V dty y q x x d dq k dt dtk q q k k (4) 要求:1) 计算纵向理想弹道,给出采用瞬时平衡假设0z z z z m m δααδ+=时所有纵向参数随时间的变化曲线。
2) 不考虑气动力下洗影响,计算飞行器沿理想弹道飞行时,你认为可以作为特性点的5个以上点处的纵向短周期扰动运动的动力系数,并分析其在特性点处的自由扰动的稳定性,以及计算在各个特性点处弹体传递函数(),(),()y n W s W s W s αδδϑδ 。
二、 建立模型基于“瞬时平衡”假设,导弹在铅垂平面内运动的质心运动方程组为:cos sin sin cos cos sin b b b b dV m P X mg dt d mV P Y mg dt dx V dt dy V dtαθθαθθθ⎧=--⎪⎪⎪=+-⎪⎪⎨⎪=⎪⎪⎪=⎪⎩ (5) 因为阶段一不考虑导弹质量随时间的变化,因此阶段一的模型需要联立公式(1)、公式(5); 其中攻角α可根据瞬时平衡假设从而可得到导弹攻角与弹道倾角之间的关系z =-z z zm m δαδα (6) 其中 X Y b x refb y ref C qS C qS == (7)其中假设公式(1)的**(-)+()θθδθθθθ=-z k k 中的=-9=-0.5,;θθk k又因为阶段二需要考虑导弹质量随时间的变化,因此阶段二的模型需要联立公式(2)公式(5)、公式(6)、公式(7)最后一阶段,因为利用了比例导引法公式(4)的k=2,可得导弹到达目标的相对微分方程为而导引率*θ=d dq k dt dt、其中k=2; 因为第三阶段的初始参数及终点坐标均为直角坐标系,由下图可知将代入到公式(4),得到直角坐标系下的微分方程组另外补充方程法向平衡方程:三、 算法实现编程使用MATLAB 软件,并运用欧拉方程解微分方程,即ode45函数;四、程序源代码*************************阶段一******************************function dy=jieduan1(t,y)dy=zeros(4,1);m=320;g=9.8;P=2000;q=0.5*1.2495*((288.15-0.0065*y(4))/288.15).^4.2558*y(1).^2;k=-9;dk=-0.5;Hi=2000*cos(0.000314*1.1*y(3))+5000;dHi=-2000*0.000314*1.1*sin(y(3));delta=k*(y(4)-Hi)+dk*(dy(3)-dHi);alpha=0.34*delta;Xb=(0.2+0.005*alpha^2)*q*0.45;Yb=(0.25*alpha+0.05*delta)*q*0.45;dy=zeros(4,1);dy(1)=P*cos(alpha)/m-Xb/m-g*sin(y(2));dy(2)=P*sin(alpha)/m/y(1)+Yb/m/y(1)-g*cos(y(2))/y(1);dy(3)=y(1)*cos(y(2));dy(4)=y(1)*sin(y(2));end******************************阶段二****************************** function dy=jieduan2(t,y)dy=zeros(4,1);m=320-0.46*t;g=9.8;P=2000;q=0.5*1.2495*((288.15-0.0065*y(4))/288.15).^4.2558*y(1).^2;k=-0.25;Hi=3050;delta=k*(y(4)-Hi);alpha=0.34*delta;Xb=(0.2+0.005*alpha^2)*q*0.45;Yb=(0.25*alpha+0.05*delta)*q*0.45;dy(1)=P*cos(alpha/180*pi)/m-Xb/m-g*sin(y(2)/180*pi);dy(2)=P*sin(alpha/180*pi)/m/y(1)+Yb/m/y(1)-g*cos(y(2)/180*pi)/y(1);dy(3)=y(1)*cos(y(2)/180*pi);dy(4)=y(1)*sin(y(2)/180*pi);end*******************************阶段三******************************** function dy=jieduan3(t,y)v=y(4);k=10;m=285.04-0.46*t;q0=-atan(3050/6000);g=9.8;q1=0.5*1.2495*((288.15-0.0065*y(2))/288.15).^4.2558*y(4).^2;k1=10;dk1=0.05;dy=zeros(4,1);r=sqrt(y(1)^2+y(2)^2);q=atan(y(2)/(y(1)-30000));elta=q-y(3);dr=-v*cos(elta);tht=q0+k*(q-q0);dq=v/r*sin(elta);dtht=k*dq;delta=k1*(y(3)-tht)+dk1*(dy(3)-dtht);alpha=0.34*delta;dy(1)=-dr*cos(q)+r*sin(q)*dq;dy(2)=-dr*sin(q)-r*cos(q)*dq;Yb=(0.25*alpha+0.05*delta)*q1*0.45;dy(3)=(2000*sin(alpha)/m+Yb/m-g*cos(y(3)))/v;y(4)=v;end***********************************main函数************************************ m(1)=287.2204; %导弹质量P=2000; %发动机推力g=9.8;k=5;det(1)=0.045;a(1)=0.6186;sit(1)=-0.000002024;V(1)=217.2867; %初始速度x(1)=24000; %初始位置H(1)=3071; %初始高度H1(1)=3050;S=0.45; %参考面积L=2.5; %参考长度k1=-0.14;k2=-0.06;sit1(1)=sit(1);p0=1.2495;T0=288.15;T(1)=T0-0.0065*H(1);p(1)=p0*(T(1)/T0)^4.25588;q(1)=1/2*p(1)*V(1)^2; %大气密度计算公式Cx(1)=0.2+0.005*a(1)^2;Cy(1)=0.25*a(1)+0.05*det(1)*180/pi; %升力系数Y(1)=Cy(1)*q(1)*S;X(1)=Cx(1)*q(1)*S;SIT(1)=(P*sind(a(1))+(Y(1)-m(1)*g*cos(sit(1))))/m(1)/V(1);Q(1)=atan(-H(1)/(30000-x(1)))+pi;r(1)=6708.2039;R(1)=-V(1)*cos(Q(1));n(1)=Q(1)+pi;SIT1(1)=k/r(1)*(V(1)*sin(n(1)));mza=-0.1; %俯仰力矩系数对攻角的偏导数mzdet=0.024; %俯仰力矩系数对舵偏角的偏导数t=0;i=0;dt=0.01;ms=0.46; %质量秒消耗量while H>0 & H1>0 %运用迭代法求解i=i+1;t=t+dt;det(i+1)=k1*(sit(i)-sit1(i))+k2*(SIT(i)-SIT1(i));a(i+1)=-mzdet/mza*det(i)*180/pi;Cy(i+1)=0.25*a(i)+0.05*det(i)*180/pi;Cx(i+1)=0.2+0.005*a(i)^2;Y(i+1)=Cy(i)*q(i)*S;X(i+1)=Cx(i)*q(i)*S;m(i+1)=m(i)-ms*dt;sit(i+1)=sit(i)+(P*sind(a(i))+(Y(i)-m(i)*g*cos(sit(i))))/m(i)/V(i)*dt;V(i+1)=V(i)+(P*cosd(a(i))-(X(i)+m(i)*g*sin(sit(i))))/m(i)*dt;x(i+1)=x(i)+V(i)*cos(sit(i))*dt;H(i+1)=H(i)+V(i)*sin(sit(i))*dt;Q(i+1)=atan(-H(i)/(30000-x(i)))+pi;sit1(i+1)=k*(Q(i)-Q(1));H1(i+1)=H(i)+V(i)*sin(sit1(i));SIT(i+1)=(sit(i+1)-sit(i))/dt;r(i+1)=(H(i)^2+(30000-x(i))^2)^(1/2);R(i+1)=(r(i+1)-r(i))/dt;n(i+1)=acos(-R(i)/V(i))+pi;SIT1(i+1)=k/r(i)*(V(i)*sin(n(i)));T(i+1)=T0-0.0065*H(i+1);p(i+1)=p0*(T(i+1)/T0)^4.25588;q(i+1)=1/2*p(i+1)*V(i+1)^2;endplot(x,H);hold on[t,y]=ode45('jieduan1',[0 39.0564],[250 0 0 7000]);plot(y(:,3),y(:,4));hold on[t,y]=ode45('jieduan2',[39.0564 115],[192.768 -0.009 9100 2998.71]);plot(y(:,3),y(:,4));其中每一段的初始值,均为上阶段的结束值所以每一阶段计算结束后,需要再给出所有数据的结果,找到每一段距离相对应的数据,即为初始值。
【VIP专享】北航飞机飞行操纵系统大作业

飞机飞行操纵系统实验报告教师:于黎明班级:130326姓名:xxx学号:130312xx一、飞机操纵系统传动机构的发展历史1、简单机械操纵系统驾驶员通过机械传动装置直接偏转舵面,舵面上的气动铰链力矩通过机械传动装置使驾驶员获得力和位移的感觉。
机械传动装置直接带动舵面,有软式和硬式两种基本型式。
软式传动装置由钢索和滑轮组成,特点是重量轻,容易绕过障碍,但是弹性变形和摩擦力较大。
硬式传动装置由传动拉杆和摇臂组成,优点是刚度大,操纵灵活。
软式和硬式可以混合使用。
2、可逆助力操纵系统在大型高速飞机上,舵面上的气动铰链力矩很大,虽然用气动补偿的方法可以减小力矩,但很难在高低速范围内达到同样效果。
40年代末出现了液压助力系统,舵面由液压助力器驱动,驾驶员通过中央操纵机构、机械传动装置控制助力器的伺服活门,间接地使舵面偏转。
它同时通过杠杆系统把舵面一部分气动载荷传给中央操纵机构,使驾驶员获得操纵力的感觉,构成所谓“机械反馈”,这就是可逆助力操纵系统。
3、不可逆助力操纵系统可逆助力操纵系统虽可解决杆力过大的问题,但在超音速飞机上还会出现杆力反向变化的问题。
由于杆力反向变化,会使驾驶员产生错觉而无法正确驾驶飞机。
为此,须把可逆助力操纵系统中的机械反馈取消,即舵面气动载荷全部由液压助力器承受。
为了使驾驶员获得操纵力感觉,在系统中增加了人工载荷机构(通常是弹簧的)以及其他改善操纵特性的装置,形成不可逆助力操纵系统。
在高空超音速飞行时,由于空气密度减小,飞机容易发生频率很高的俯仰和横侧振荡,驾驶员来不及作出反应。
为了克服振荡,在超音速飞机上普遍安装自动增稳装置,如俯仰阻尼器和方向阻尼器等。
4、电传操纵系统靠电信号传递飞行员的操纵指令,提高了响应速度性,并减轻了重量和体积。
消除了机械传动结构的非线性因素,改善了机械操纵直接固定在机体上面而引起的人机诱发振荡,改善了飞机的操纵品质,对飞机的结构变化的影响不敏感,可以降低和减少维护工作量以及更容易与自动飞行控制系统相结合。
飞控大作业
《飞行控制系统》课程实验报告班级 0314103学号 031410329 姓名嵇程成绩南京航空航天大学2017年4月《飞行控制系统》课程实验(8学时)一、目标通过本实验,学生能够掌握基本的飞行控制系统的结构,设计的方法,仿真验证方法及控制性能的分析,加深对课堂教学内容的理解。
二、环境在windows操作系统下,matlab/simulink下进行设计与仿真。
三、内容(一)飞机纵向飞行控制系统的设计与仿真(4学时)1、飞机纵向自然特性的分析与仿真,包括短周期模态,长周期模态的分析,求解阻尼与自然频率,分析开环响应特性。
2、飞机俯仰角控制系统的设计;3、飞机速度控制系统的设计;4、飞机纵向运动的仿真与分析(二)飞机侧向飞行控制系统的设计与仿真(4学时)1、飞机纵向自然特性的分析与仿真,包括滚转模态,荷兰滚及螺旋模态的分析,求解阻尼与自然频率,分析开环响应特性。
2、飞机滚转角控制系统的设计;3、飞机航向控制系统的设计;4、飞机侧向航向协调控制仿真与分析四.要求1.在matlab下进行编程,系统设计与仿真;2.撰写实验报告,要求给出设计的参数,实验结果及曲线。
3.报告封面采用模板给定格式。
4.报告需提交打印稿,沿左侧装订。
(一)飞机纵向俯仰角与速度控制系统设计 某飞机的纵向线性小扰动方程为:lon lon xA xB u =+& 其中 状态[]T x u q h αθ=∆∆∆∆∆,控制量[]T e T u δδ=∆∆ 问题:1、 分析飞机纵向动力学模态,求飞机的长周期与短周期阻尼与自然频率。
输入:[W n ,z,p]=damp(alon)%系统的自然频率、阻尼比和闭环极点输出:W n z p 2.7127 2.7127 0.0708 0.0708 0.0030 0.3890 0.3890 0.0875 0.0875 1.0000 -1.0553 + 2.4990i -1.0553 - 2.4990i -0.0062 + 0.0706i -0.0062 - 0.0706i -0.0030 + 0.0000i表1-1-1p 1p 2ζ W n 长周期 -0.0062 + 0.0706i -0.0062 - 0.0706i 0.0875 0.0708 短周期 -1.0553+2.4990i -1.0553 - 2.4990i0.3890 2.7127表1-1-22、 对升降舵及油门单位阶跃输入下的飞机自然特性进行仿真,画出相应的状态曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞行控制系统大作业
一、飞机纵向俯仰角与速度控制系统设计 某飞机的纵向线性小扰动方程为: l o n l o n x A x B u =+ 其中 状态[]T x u q h αθ
=∆∆∆∆∆,控制量[]T e T u δδ=∆∆
问题:
1、 分析飞机纵向动力学模态,求飞机的长周期与短周期阻尼与自然频率。
2、 对升降舵及油门单位阶跃输入下的飞机自然特性进行仿真,画出相应的状态曲线。
3、 采用短周期简化方法,求出传递函数()e q
G s δ∆∆。
采用根轨迹方法设计飞机的
俯仰角控制系统,并进行仿真。
4、 基于长周期简化方法,求出传递函数()T u G s δ∆∆,设计飞机的速度控制系统,
并进行仿真。
5、 基于纵向线性模型(状态方程),分别对速度控制与俯仰角控制进行仿真。
假设作动器特性为
10
10
s +。
要求:给出相应的传递函数,画出相应的结构图根轨迹图及仿真曲线。
二、飞机侧向滚转角控制系统设计 某飞机的侧向线性小扰动方程为: l a t l a t x A x B u =+ 其中 状态[]T x p r βφψ=∆∆∆∆∆,控制量[]T a r u δδ=∆∆
问题:
1、 求出侧向运动方程的特征根,及对应的模态,求出荷兰滚模态的阻尼及自然频率。
2、 对副翼与方向舵单位阶跃输入下的自然特性进行仿真。
3、 采用简化方法,求出传递函数()a p G s δ∆∆。
采用根轨迹方法设计飞机的滚转角
控制系统,并进行仿真。
4、设计飞机航向控制系统,并进行仿真。
5、设计飞机方向舵协调控制律,基于侧向线性模型(状态方程),进行航向控制系统的仿真。
假设作动器特性为
10
10
s。
要求:给出相应的传递函数,画出相应的结构图根轨迹图及仿真曲线,提交word 打印稿。
1.数据文件在dataX.mat文件中,按照学号的最后一位选择相应的数据文件。
如学号最后一位为5,则选择data5.mat文件作为你设计的数据。
2.在matlab中输入load data5 则可将数据导入,
其中alon为纵向系统阵,blon为纵向控制输入阵
alat为侧向系统阵,blat为侧向控制输入阵
控制量的单位为deg,状态变量的单位为(deg,deg/s,m)
3、由状态方程求传递函数用ss2tf()函数。
4、仿真可以用simulink搭建仿真图。
5、仿真的输入采用单位阶跃。
6、曲线要标注单位,用plot画,不能直接copy scope中的图。
例:
-
Root Locus
Real Axis
I m a g i n a r y A x i s
图2.2 俯仰角速率回路根轨迹
此时,选择阻尼0.7ξ=,得到0.4q K
=。
角速率回路的单位阶跃响应曲线如图2.3所示。
t(s)
q (d e g /s )
图2.3 角速率回路单位阶跃响应曲线。