基于手机定位的实时交通数据采集技术
交通设施的智能交通信息系统实时交通数据和导航服务

交通设施的智能交通信息系统实时交通数据和导航服务交通设施的智能交通信息系统:实时交通数据和导航服务随着城市交通的日益拥堵和人们对交通效率的要求增长,智能交通信息系统成为了现代交通管理和导航的重要工具。
该系统利用先进的技术和数据分析,提供实时交通数据和导航服务,以帮助驾驶员和交通管理部门更好地掌握交通状况,并提供优化的路线导航。
本文将介绍智能交通信息系统的实时交通数据获取和导航服务的功能,以及其对城市交通管理和出行体验的影响。
一、实时交通数据获取智能交通信息系统通过多种传感器和数据源获取实时交通数据,包括道路交通流量、交通速度、堵塞信息等。
这些数据的获取方式包括但不限于以下几种:1. 车载传感器:现代车辆常配备了各种传感器,如全球定位系统(GPS)、车载摄像头、红外传感器等,用于获取交通状况和车辆位置等信息。
2. 道路感应器:在道路上安装的感应器可以通过测量车辆通过的时间和频率来获取交通流量和车辆密度等数据。
3. 交通摄像头:交通摄像头可以通过图像分析的方式获取交通流量、交通违规行为等数据。
4. 移动手机数据:通过收集手机的定位信息和移动网络数据,可以分析人群流动性和交通拥堵情况。
二、导航服务智能交通信息系统提供的导航服务基于实时交通数据和用户的出行需求,通过算法和数据分析,为驾驶员提供最佳的路线和导航指引。
导航服务的功能主要包括以下几个方面:1. 实时路况提示:系统可以根据实时交通数据,提供交通拥堵、意外事故等路况提示,并给出可选的绕行建议,帮助驾驶员选择最佳的路径。
2. 动态导航:系统会根据起点、终点和实时交通数据,计算出最佳的行车路线,并为驾驶员提供语音提示和屏幕导航,指导他们正确行驶。
3. 个性化导航:系统可以根据驾驶员的偏好和出行需求,为其提供个性化导航服务,例如优先选择高速公路、避开收费站等。
4. 周边设施导航:系统还可以为用户提供周边的停车场、加油站、餐厅等设施的导航和推荐,提升出行的便利性和体验。
基于Android手机的实时公交查询系统设计与实现
4.4 模拟车辆终端运行效果
5 模拟手机客户端系统设计与实现
5.1 模拟手机客户端界面模块
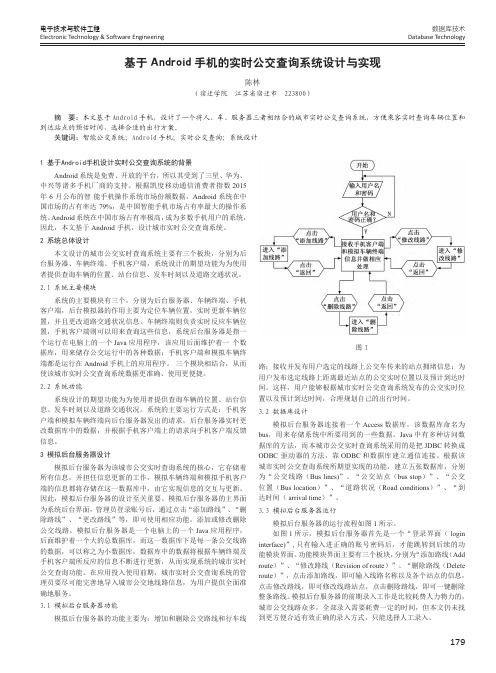
模拟手机客户端一共有四个功能板块,分别为“登录界面(login interface)”、“线路选择(Line selection)”、“站点选择(Site selection)”、“状态选择(State selection)”,与模拟车辆终端 所不同的是,用户在选择完线路和站点后,即可跳转到地图,地图 上显示线路信息及车辆位置,系统将计算出最近的公交到达用户所 选站点的预估时间,并且显示车辆终端及手机客户端所发布的道路 交通状况,用户即可按照预估时间及实时更新的车辆位置,确定自 己出门乘坐公交的时间。而在手机客户端的状态选择中,也有四个 模块,分别为“重度拥堵(State1)”、“中度拥堵(State2)”、“轻 度拥堵(State3)”、“道路顺畅(State4)”,与模拟车辆终端相同,
2.2 系统功能
系统设计的期望功能为为使用者提供查询车辆的位置、站台信 息、发车时刻以及道路交通状况。系统的主要运行方式是:手机客 户端和模拟车辆终端向后台服务器发出的请求,后台服务器实时更 改数据库中的数据,并根据手机客户端上的请求向手机客户端反馈 信息。
3 模拟后台服务器设计
模拟后台服务器为该城市公交实时查询系统的核心,它存储着 所有信息,并担任信息更新的工作,模拟车辆终端和模拟手机客户 端的信息都将存储在这一数据库中,由它实现信息的交互与更新。 因此,模拟后台服务器的设计至关重要。模拟后台服务器的主界面 为系统后台界面,管理员登录账号后,通过点击“添加路线”、“删 除路线”、“更改路线”等,即可使用相应功能,添加或修改删除 公交线路。模拟后台服务器是一个电脑上的一个 Java 应用程序, 后面维护着一个大的总数据库,而这一数据库下是每一条公交线路 的数据,可以称之为小数据库,数据库中的数据将根据车辆终端及 手机客户端所反应的信息不断进行更新,从而实现系统的城市实时 公交查询功能。在应用投入使用前期,城市实时公交查询系统的管 理员要尽可能完善地导入城市公交地线路信息,为用户提供全面准 确地服务。
物联网中的实时位置跟踪技术
物联网中的实时位置跟踪技术随着科技的不断发展,物联网已经成为一个热门领域。
物联网是指通过多种设备、传感器和互联网络连接物体和人员的一种技术。
其中一个关键的应用领域是实时位置跟踪技术(Real-Time Location Tracking,RTLT)。
RTLT技术是一种让物体或人员在任何时刻都能够被跟踪的技术,这对于管控、物流、交通和公共安全等重要领域都有着重要的应用价值。
在本文中,我们将深入探讨RTLT技术在物联网领域的应用。
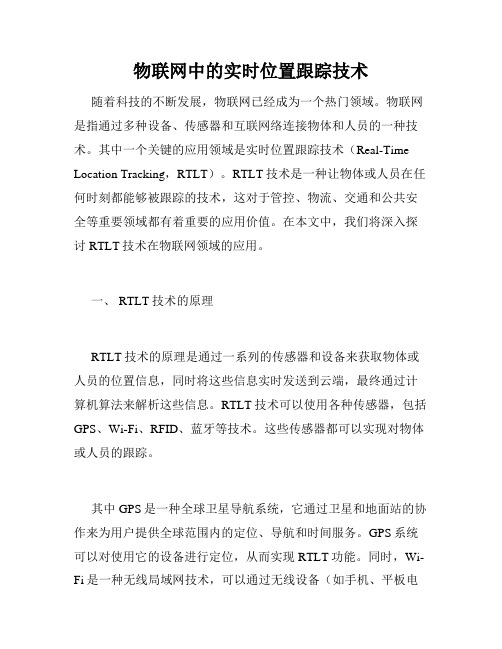
一、 RTLT技术的原理RTLT技术的原理是通过一系列的传感器和设备来获取物体或人员的位置信息,同时将这些信息实时发送到云端,最终通过计算机算法来解析这些信息。
RTLT技术可以使用各种传感器,包括GPS、Wi-Fi、RFID、蓝牙等技术。
这些传感器都可以实现对物体或人员的跟踪。
其中GPS是一种全球卫星导航系统,它通过卫星和地面站的协作来为用户提供全球范围内的定位、导航和时间服务。
GPS系统可以对使用它的设备进行定位,从而实现RTLT功能。
同时,Wi-Fi是一种无线局域网技术,可以通过无线设备(如手机、平板电脑)等来获取当前设备所连接的Wi-Fi的名称、信号强度等信息,从而实现对设备的定位。
RFID技术是指用于识别和跟踪标记物品的一种自动识别技术。
RFID标签可以通过无线通讯方式与读写设备通讯,记录标签的唯一标识符、位置以及其他信息。
蓝牙技术是一种近距离通讯技术,可以用于连接设备进行数据传输和底层通信。
这些传感器和技术在RTLT技术中都扮演了重要角色。
二、 RTLT技术在物联网中的应用RTLT技术在物联网领域有着广泛的应用。
下面我们将对几个主要应用领域进行讨论。
1. 物流管理在物流管理领域,最大的问题是如何准确、高效地跟踪货物。
RTLT技术可以实现对货物的实时监测、管理,从而为物流企业提供支持。
对于送货司机来说,RTLT技术可以帮助他们确定物流信息、货物线路和卸货地点等方面的信息。
基于位置服务的智能交通系统研究

基于位置服务的智能交通系统研究在当今社会,交通问题日益严峻,拥堵、事故、出行效率低下等问题给人们的生活和工作带来了极大的不便。
为了有效解决这些问题,基于位置服务的智能交通系统应运而生。
这一系统借助先进的技术手段,实现了对交通的智能化管理和优化,为人们的出行提供了更加便捷、高效和安全的保障。
一、位置服务与智能交通系统的概述位置服务,简单来说,就是通过各种技术手段获取移动终端用户的位置信息,并基于此为用户提供相关的服务。
常见的位置服务技术包括全球定位系统(GPS)、北斗卫星导航系统、基站定位等。
智能交通系统则是将先进的信息技术、数据通信传输技术、电子传感技术、控制技术及计算机技术等有效地集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统。
基于位置服务的智能交通系统,就是将位置服务与智能交通系统相结合,通过获取车辆和行人的实时位置信息,实现对交通流量的监测、交通拥堵的预警、路径规划的优化等功能。
二、基于位置服务的智能交通系统的关键技术1、定位技术准确的定位是基于位置服务的智能交通系统的基础。
目前,GPS 和北斗卫星导航系统是应用最为广泛的定位技术,但在城市高楼密集区、隧道等特殊环境中,其定位精度可能会受到影响。
因此,多模定位技术,如结合惯性导航、基站定位等,成为了提高定位精度和可靠性的重要手段。
2、通信技术高效、稳定的通信是实现位置服务与智能交通系统融合的关键。
目前,4G/5G 通信技术为实时传输大量的位置数据提供了可能,车联网技术则使得车辆之间、车辆与基础设施之间能够实现实时通信和信息交互。
3、大数据与云计算技术智能交通系统产生了海量的位置数据,如何对这些数据进行存储、处理和分析,是发挥系统功能的重要环节。
大数据技术能够从海量的数据中挖掘出有价值的信息,云计算技术则为数据的处理提供了强大的计算能力和存储空间。
4、智能算法在路径规划、交通流量预测等方面,需要运用智能算法来实现最优的解决方案。
交通信息采集技术综述
交通信息采集技术综述摘要:我们都知道,准确的交通信息采集是智能交通系统的基石。
如何获得准确、实时的交通信息对ITS的应用效果起着至关重要的作用。
而交通信息的采集又分为静态交通信息采集与动态交通信息采集。
因此本文将分类介绍这两种交通信息所对应的采集技术,其中着重介绍动态交通信息技术采集,分析它们的优缺点与适用场所,并对交通信息采集技术的未来发展做出合理展望。
关键词:交通信息;采集技术;智能交通系统;动态;静态;Abstract:As we all know, the accurate traffic information collection is the foundation of Intelligent Transport System. How to obtain accurate and real-time traffic information plays an important role in ITS application. The traffic information collection is divided into two parts: static traffic information acquisition and dynamic traffic information collection. So this article will introduce classification of these two kinds of traffic information collection technology, which mainly focuses on dynamic traffic information collection, analysis the advantages and disadvantages of them and scope of application. Also, make reasonable forecast of the future development of traffic information collection technology.Key Words: traffic information; technology of collection; Intelligent Transport System; static; dynamic;引言20 世纪90 年代以来,智能交通系统(Intelligent Transportation System,ITS)得到了飞速发展,并日益成为提高运输效率、改善行车安全、减少空气污染的重要途径。
基于GPS的行车数据挖掘与分析

基于GPS的行车数据挖掘与分析随着科技的不断进步,GPS定位技术已经不再是一个新鲜事物。
几乎每个手机都有GPS功能,人们在外出旅行、健身或者出差时都可以用GPS来记录自己的行程,这些数据也可以被用于其他一些方面。
其中之一就是行车数据挖掘和分析。
随着交通工具的普及,越来越多的人选择了自驾出行,那么车辆的位置信息、行驶轨迹、速度等等都可以通过GPS来记录和存储。
这些数据虽然看似无用,但是经过合理的处理和分析,就可以得出许多有价值的信息,比如某段路段的拥堵情况、道路危险点、人流密集区域等等。
因此,基于GPS的行车数据挖掘和分析在现代交通领域中具有非常广泛的应用前景。
行车数据挖掘包括多方面的内容,比如轨迹分析、时间分析、空间分析等等。
其中,轨迹分析是最基础的部分。
通过对车辆的轨迹进行分析,可以得出比较准确的车速、行驶时间、行驶距离等信息。
同时,在轨迹分析的基础上,还可以通过路网模型来进行路径规划,预测未来路线并避免出现拥堵等问题。
行车数据挖掘还可以通过时间分析来得出车辆行驶时间的规律。
不同的时间段车流量不一定相同,比如早上和晚上高峰期交通拥堵较为明显,而白天和深夜交通则相对较为畅通。
通过数据分析,我们可以制定出更加合理的路线规划,避免出现交通拥堵等问题,为行车活动提供更优质的体验。
空间分析则是行车数据挖掘中比较综合的一个环节。
通过空间分析,可以将车辆的行驶轨迹和周围环境的数据进行比对分析。
比如车辆在某一个区域停留的时间比较长,则说明这个区域可能有特别奇特的风景、餐饮店或者商业中心,有可能将这些点作为旅游营销的推广点。
还可以将空间分析和时间分析相结合,来预测交通拥堵、道路状况等,帮助司机们选择最优路线,并能够更加准确地预测到达目的地的时间。
行车数据挖掘和分析的应用还远远不止这些。
比如在行车安全监测方面,也可以通过基于GPS的车辆位置信息,来监控道路的安全性和车辆行驶的安全性。
这些都是基于大量的行车信息数据,通过分析和挖掘得出的结论,真正实现了数据的运用价值。
交通信息主要采集技术综述

交通信息主要采集技术综述交通信息的准确采集对于交通规划、管理和运营至关重要。
随着科技的不断发展,出现了多种交通信息采集技术,这些技术为改善交通状况、提高出行效率提供了有力支持。
一、环形线圈检测技术环形线圈检测是一种较为传统且应用广泛的交通信息采集技术。
它的原理是在道路上埋设环形感应线圈,当车辆通过时,会引起线圈电感量的变化,从而检测到车辆的存在和通过情况。
这种技术的优点在于准确性较高,能够较为精确地检测车辆的速度、流量和占有率等信息。
而且其稳定性好,受环境因素影响较小。
然而,它也存在一些缺点。
安装过程需要破坏路面,施工较为复杂,成本较高。
同时,环形线圈容易受到路面变形和损坏的影响,维护难度较大。
二、视频检测技术视频检测技术是通过摄像头拍摄道路图像,然后利用图像处理算法对图像进行分析,从而获取交通信息。
视频检测的优势明显。
它能够提供直观的交通场景图像,不仅可以检测车辆的流量、速度等常规信息,还能对车辆类型、车道占用等进行识别。
而且安装相对简单,不需要破坏路面。
但它也有不足之处,例如容易受到天气、光照等环境因素的干扰,图像质量可能会影响检测的准确性。
此外,视频检测系统的处理数据量大,对硬件设备和计算能力要求较高。
三、微波检测技术微波检测技术利用雷达原理,向道路发射微波波束,并接收反射回来的波束,通过分析波束的频率和相位变化来检测车辆的信息。
微波检测具有安装方便、可检测多车道、能够快速获取数据等优点。
它不受天气和光照条件的影响,在恶劣天气下仍能正常工作。
不过,微波检测对于低速车辆的检测精度相对较低,且设备成本较高。
四、地磁检测技术地磁检测技术基于车辆通过时对地球磁场的影响来检测交通信息。
在道路中埋设地磁传感器,当车辆经过时,磁场会发生变化,从而检测到车辆的存在。
该技术的优点是安装维护简单,不易受到环境干扰,且能够检测车辆的行驶方向。
但地磁检测的检测范围相对较小,对流量较大的道路可能存在检测精度不足的问题。
基于智能交通的交通信息采集技术分析
基于智能交通的交通信息采集技术分析摘要:交通信息是智能交通系统的重要基础,随着技术的进步,交通管理和控制系统对交通信息的质量要求越来越高,因此信息采集技术的研究十分重要。
常见的交通信息采集的方式以及信息处理方法,如视频采集技术和地测车辆检测技术等都有各自的优缺点。
还探讨了新技术如无人机检测技术在先进的交通信息采集系统中的应用前景。
关键词:智能交通;交通信息采集技术;技术分析引言智能交通是如今交通行业发展的热门方向之一,它能有效地综合运用各项技术,充分发挥交通基础设施的效能,提升出行服务质量,实现交通运输系统的科学化、高效化和人性化。
交通信息采集是智能交通中的重要一环,它为智能交通的有效运行、正确决策提供了基础支撑和科学依据。
在智能交通背景下,一部分传统技术以其技术成熟、成本低廉、便于操作等优势依然在信息采集技术中占有一席之地,如地感线圈、红外线、超声波等,另一些原有技术在不断改进、优化之后渐渐成为交通信息采集的重要手段,如视频采集技术、地磁、浮动车技术等。
此外,还有一部分新技术虽然是交通信息采集技术中的“新人”,但是它们因为技术新颖、与当前研究热点联系密切,逐渐成为智能交通大环境下交通信息采集的“宠儿”,例如无人机技术等。
1.智能交通系统发展现状1.1国外发展现状智能交通系统简称ITS,由美国在20世纪60年代提出,目前ITS发展比较完善的有美国、欧盟、日本组成的3大基地,同时也包括亚洲的韩国、新加坡以及我国香港特别行政区。
对于ITS发展比较完善的地区,已经处在产业化和大规模应用阶段,在应用过程中特别重视前期制定规划,制定相关执行规范与标准,并加大投资与研发力度。
在建立ITS过程中,大量的投资主要来源于政府,也有部分企业参与,并要根据国情的具体实况进行有重点地投资发展。
比如,在美国发生“911”恐怖袭击后,美政府和交通领域专业人员开始注重对恐怖袭击预防的ITS系统建设,主要是针对灾难程度评价、交通恢复速度和快速疏散与隔离等方面进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这类技术方法的关键问题主要包括:定位精度与
话的连续性,当手机的当前服务基站信号强度衰减到 一定程度时,手机选择新的基站作为当前服务基站的 过程。利用车上手机沿道路行驶时沿路基站发生切换 的信息来估箅出路段的行程车速,其基本原理、步骤 解析如下”1:
图1 TDoA定位原理
1The呻c印1c Fig·1
o‘TDoA‘。。hn0109y
1)切换网络标定 定义道路上发生手机切换的位置为切换点(Han— dover Point),连续发生两次手机切换的路段为切换路 段,切换点和切换路段构成切换网络(Handover Net- work)d在道路上标定出手机发生切换点的位置,通 过专门的测试软件经过实地测试获得其切换点的坐 标,计算出每条切换网络的路段长度。如图3所示, 其中A(1,2)就是一个标定的切换点,表示手机从基 站l切换到基站2的位置坐标;L。就是两个切换点A (1,2)和B(2,7)之间的路段。 2)路径匹配 按照预先标定好的切换网络,在理想条件下每条 道路都有一条稳定的切换序列与之对应。按照基本原 理图,与道路相对应的手机切换序列为 1.2-7-8一14-15-21-24-27,当通过GsM网络中7号信令解 析出来的小区标识全部或者部分与这条道路的切换序 列相一致.就将这个手机的移动路径匹配到这条道路 上。例如,采集到手机切换序列为8-14—15、1.2·7、 15-21-24—27等,均可以判断手机移动路径在这条道路 上。 3)路段速度计算 在完成路径匹配后,就可以进行每条路段的速度 计算。手机至少发生2次切换,才毹计算出速度。例 如,如果采集到的手机序列为l一2—7,其间的时间差 为^,那么按照事先标定的切换网络可以得到发生这 样一次切换序列手机移动的距离为L。,那么可以计算 出手机移动的速度为Ⅵ=L/b。按照同样的方法,根 据采集到的手机切换序列计算出所有相应的路段速度 V,i=2,3,…,7。
3 关键技术
小区标识定位方法
系食髹疆蹇茬蒡冀
a、
b1
可能的定位区域举计算得到的位置
图2结合时间提前量的小区标识定位原理 Fig 2 The p血ceple of e1111anced cell D wilh TA
万方数据
3.1预先得到手机的位置坐标 A—GPS、TDOA、E血anced CellⅢwith TA这三种
第3卷第4期 2005年11月
城市交通
URBAN TRANSPORT OF CH I NA
【文章编号】1672—5328(2005)04一0063 06
V01.3 No.4 Nov.2005
基于手机定位的实时交通数据采集技术
杨飞裘炜毅
(同济大学,上海2 O 0 O 9 2)
【摘要】交通数据采集是建设智能交通系统的首要环节,如何通过较为经济的方式及时获得质量可靠的交通 数据是当前国内外交通数据采集面临的重大问题。首先介绍了手机定位技术应用于交通数据采集的发展背景
【中图分类号】u491
【文献标识码】A
Mob¨e Phone Lo明aon Based Re8l Time T憎仟Ic D8ta Co¨ection.Research
YANG Fci,QIU Weiyi (Ton西i univers时,Shan曲ai 200092,china) Abst憎d:Tral葡c data c011ection is廿1e constmction of the ITS system and how to gain the仃amc data wim reliabIe quality by an economic81 way js an important jssue.Tbjs paper fhdy in仃Dduces出e back伊Dund锄d de瑚and of t11e mob订e phone Iocation based昀伍c da诅collection,then sevcral mobilc phone 10cati叽tcchnologies are iIl劬)duced a|ld their location accuracy is compared.some key isslles ab伽t me mobile phone based打a街c data c011ection are analyZed.
OntneBav』恤a—eCwO催、一
。
bv Usmg CeIlutar Phones
asI、Dbesl
英国
加拿大交通运
加拿大薯美罡2:熠
限公司
N………’ 2004荷兰Lo百cacMG公司省提供^仃s(Mob"e r裂品笄等嚣、
:㈣荷~麟MG公司燃瓣黧辕穸1。劂蒜 na历c system)服务
万方数据
TDoA定位方法是一种基于网络的定位技术, 无需手机与基站时间同步,定位精度在30~50 m。
2.2辅助卫星定位技术 辅助卫星定位(Assisted GPs,A_GPs)的定位
原理跟GPs定位原理类似”“,在手机内加装GPs定 位芯片,通过卫星信号计算位置。不同的是, A—GPs方式通过传输一些辅助参数,可以大大缩 小代码搜索窗口和频率搜索窗口,使得定位时间 从lo min缩短到几秒钟。实际上,服务器就是静 止的GPs接收器,通过具有辅助功能的服务器将 卫星的微弱信号传送至手机来增强移动GPs接收 器的能力。A.GPs定位技术精度一般在10~20 m, 有时候受GPs信号的影响定位精度略有下降。
Nov,2005VoI 3No.4
2常用的手机定位技术
近期国外开展的项目中,对于手机定位技术 均有应用,见表2。基于手机定位技术的交通数据 采集通常采用以下4种方式。
2.1时间到达差定位方法 时间到达差(Time Di跽rence of Arrival,
TDOA)定位方法的基本思想是”“,通过在每个基 站上加装一个位置测试单元(Localjon MeaSure Unit) 来测量手机移动台发射信号到达不同基站的时间 差,计算出移动台到不同基站的距离差。然后, 根据几何原理,由平面上的一个动点到两个定点 的距离为一个常数的轨迹,是一条双曲线,如果 距离的正负已知,那么该轨迹为双曲线的一支。 为了确定手机的位置,至少必须有两条相交的双 曲线。因此,TDOA定位方法至少需要三个基站, 而且各个基站的时间必须同步。
如图l所示,设^,6分别为基站1和基站2发 射信号的时刻,b,‘分别为手机接收到基站l、基 站2信号的时刻,则d。=(6-^)。(:,d2=(b—b)+c, 其中c为光速,(d1-d2)为一个常数,同理可以计算 出(d2_d3)也为一常数。因此,通过联立求解两条双 曲线方程组就可以获得手机的位置坐标。
2005年1】月第3卷第4期
奎塑堑堑查!堡垒塑旦堕塑!!!!!塾竺!竺墅
路径匹配率的关系、定位更新频率与道路匹配率的关 系、定位密度(单位面积、单位时间内位置坐标的数 量)与道路覆盖率的关系以及路径匹配算法的选择。
the pm野锄experience肌d research rcsults by lhe fore近尹tr锄sponation agency锄d 1lIlivers“ies are reviewed.At last,
several problems which need如nher stIldy are put forwa耐.
收稿日期:2004.07.07 作者简介:杨飞(1980一),男,同济大学交通运输工程学院博士研究生。Em ail:y”gfeijon商i@163com
万方数据
窒塑堑夔查!翌翌!里竺垒堕!!!!!塾塑!旦鳗
推动了各大无线运营商积极开发研究手机定位技术。 在技术方面,传统的环形线圈数据采集技术的局限
结合时间提前量的小区定位(Enhanced ceu D wiIh TA)技术不需要在基站上加装设备,其定位精度 较低,取决于基站的覆盖半径。在农村、城市郊区, 基站覆盖半径较大,一般在1~2 km:在市中心话务量 较高,基站覆盖半径最小可达100 m。
2.4基于手机切换的交通数据采集方法 切换fHandover)是指在通话过程中,为了保持通
表1联邦委员会对手机定位技术精度的要求 m
Tab.1 F℃C gIlidelines for 10c“on accl】racy
m
表2近期国外手机定位技术应用于交通数据采集概况
Tab.2 Recent development of mobile phone location based re“11me‘王}lta conection
1发展背景和需求
在美国国家行政驱动和市场需求拉动下,手机 定位技术迅速发展、成熟。为了提高911紧急电话的 处理效率,美国联邦委员会(Fcc)对网络运营商提出 要求,在2005年年底之前对911电话的呼叫位置必须 达到一定精度的定位要求…,见表1。
同时,无线定位服务(Location Based seⅣices, LBs)有着较大的市场利润和商业空间。据相关统计 数据,目前的LBs市场价值在5亿美元,预计在未来 几十年里将增加到360亿美元,市场潜力较大,这就
2.3结合时间提前量的小区定位技术 手机在通话过程中会跟邻近的基站保持通信
联系,基站的覆盖范围一般在几百米至1 ooO m。
堑】垂堕塾!墨王王盟室焦塑塞盟童道热量墨塞挂查
因此,通过判定手机通信的当前服务基站,就可确定 手机位置在基站的覆盖区域范围内,如图2嘲a所示。 时间提前量(TiIIle Advance,TA)是指通信信号在手机 和基站之间来回传输一次的时间,通过(TA×c)/2可 以估算出手机到基站的赢线半径距离。因此,通过 TA可以进一步计算出手机的位置坐标(见图2b)。