飞思卡尔KE06功能模块介绍
飞思卡尔单片机快速上手指南说明书
Freescale Semiconductor, Inc.Document Number: 用户指南 Rev. 0, 09/2014Confidentiality statement, as appropriate to document/part status.___________________________________________________________________飞思卡尔单片机快速上手指南作者:飞思卡尔半导体IMM FAE 团队飞思卡尔半导体是全球领先的单片机供应商,其单片机产品包含多种内核,有数百个系列。
为支持用户使用这些产品,飞思卡尔提供了丰富的网站资源、文档及软硬件工具,另外,我们还有众多的第三方合作伙伴及公共平台的支持。
对于不熟悉飞思卡尔产品和网站的初学者来说,了解和使用这些资源这无疑是一个令人望而生畏的浩瀚工程。
本指南的目的,就是给初学者提供一个指导,让他们不被这些海量信息淹没;用户根据本指导提供的操作步骤,能迅速找到所需的资源,了解如何使用相关的工具。
在本指南中,我们以飞思卡尔的新一代Kinetis 单片机K22系列为例,介绍了如何获取与之相关的资源,如何对其进行软硬件设计和开发。
实际上,这些方法也适用于其它的单片机系列。
当然,对于其它有较多不同之处的产品,我们也会继续推出相应的文档,供广大用户参考。
目录1 如何获取技术资料与支持 ..........................................................2 2 如何选择产品、申请样片及购买少量芯片和开发工具 ........... 93 飞思卡尔单片机的开发环境、开发工具和生态系统 ............. 224 如何阅读飞思卡尔的技术文档 ................................................ 45 5 飞思卡尔单片机硬件设计指南 ................................................ 55 6飞思卡尔单片机软件开发指南 (67)飞思卡尔单片机快速上手指南, Rev. 1, 09/20142Freescale Semiconductor, Inc.1 如何获取技术资料与支持1.1 概述当用户使用飞思卡尔单片机芯片时,如何获取芯片的数据手册(Datasheet )、参考设计(Reference Manual )和官方例程等资源呢?另外当用户遇到了技术问题该如何获得帮助和解答呢?这里以Kinetis 的K22系列芯片为例为大家介绍如何解决这些问题。
飞思卡尔k系列_ftm模块详解
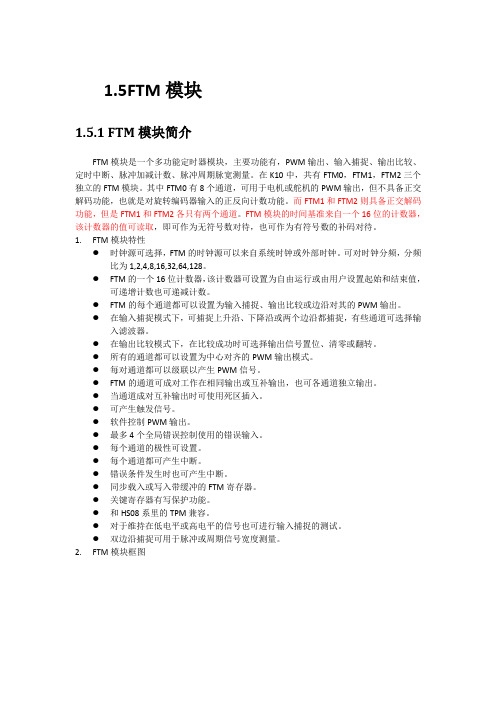
1.5FTM模块1.5.1 FTM模块简介FTM模块是一个多功能定时器模块,主要功能有,PWM输出、输入捕捉、输出比较、定时中断、脉冲加减计数、脉冲周期脉宽测量。
在K10中,共有FTM0,FTM1,FTM2三个独立的FTM模块。
其中FTM0有8个通道,可用于电机或舵机的PWM输出,但不具备正交解码功能,也就是对旋转编码器输入的正反向计数功能。
而FTM1和FTM2则具备正交解码功能,但是FTM1和FTM2各只有两个通道。
FTM模块的时间基准来自一个16位的计数器,该计数器的值可读取,即可作为无符号数对待,也可作为有符号数的补码对待。
1.FTM模块特性●时钟源可选择,FTM的时钟源可以来自系统时钟或外部时钟。
可对时钟分频,分频比为1,2,4,8,16,32,64,128。
●FTM的一个16位计数器,该计数器可设置为自由运行或由用户设置起始和结束值,可递增计数也可递减计数。
●FTM的每个通道都可以设置为输入捕捉、输出比较或边沿对其的PWM输出。
●在输入捕捉模式下,可捕捉上升沿、下降沿或两个边沿都捕捉,有些通道可选择输入滤波器。
●在输出比较模式下,在比较成功时可选择输出信号置位、清零或翻转。
●所有的通道都可以设置为中心对齐的PWM输出模式。
●每对通道都可以级联以产生PWM信号。
●FTM的通道可成对工作在相同输出或互补输出,也可各通道独立输出。
●当通道成对互补输出时可使用死区插入。
●可产生触发信号。
●软件控制PWM输出。
●最多4个全局错误控制使用的错误输入。
●每个通道的极性可设置。
●每个通道都可产生中断。
●错误条件发生时也可产生中断。
●同步载入或写入带缓冲的FTM寄存器。
●关键寄存器有写保护功能。
●和HS08系里的TPM兼容。
●对于维持在低电平或高电平的信号也可进行输入捕捉的测试。
●双边沿捕捉可用于脉冲或周期信号宽度测量。
2.FTM模块框图由图可见,FTM模块的核心是一个16位计数器,该计数器的时钟源可以选择,如果我们选择由FTM来实现PWM,输入捕捉,或者输出比较,定时中断,脉宽测量等功能,则一般选择system clock。
飞思卡尔电机控制模块详解

M=2.一、关键点1、MC 模块驱动电机的PWM 波频率在20K 左右时效果比较好。
DITH 位等于0时,计算方法如下:DITH=1时,其中,左对齐和有对齐方式下 M=1,中间对齐是2、MC 模块定时计数器的中断最好禁止,如果开启,在相应的中断服务程序中至少要添加一条“清楚中断标志位”的指令。
3、电机控制模块共8个通道,每个通道有2个Pin 脚组成。
4、Fast 位控制精度,7位或者11位。
5、给周期寄存器写入数值,可启动 MC 计数器,写0关闭所有通道的计数器。
6、MCAM[1:0]写入0x00可关闭某个channel ,写入非零值不是启动MC 计数器,而是控制对齐方式。
为了精确周期寄存器的值应尽量大,Ftc 应尽量小。
二、寄存器寄存器讲解讲解讲解::1 MCCTL0 (Motor Controller Control Register 0)第7位保留;第6、5位是MCPRE[1:0]控制电机控制器定时计数器时钟f TC 预分频系数。
如下:第4位 MCSWAI 置1,等待模式中电机控制器正常运行,清0,在等待模式中电机控制模块时钟关闭。
第3位,FAST ,清0,电机控制器PWM 模块占空比寄存器分辨率设置为11位,置1,电机控制器PWM 模块占空比寄存器分辨率设置为7位。
第2位,DITH ,清零,电机控制器dith 特性禁止,置1电机控制器dith 特性使能。
第1位保留;第0位MCTOIF ,为1表示,电机控制模块定时计数器溢出;为0,表示自上次复位或清零以来,电机控制模块定时计数器没有发生溢出。
2 MCCTL1 (Motor Controller Control Register 1)第7位,RECIRC控制PWM波极性。
0表示—,1表示+ ;第6到第1位系统保留;第0位,MCTOIE,为0表示Motor Controller Timer Counter Overflow Interrupt禁止,为1标志使能。
基于CAN总线和KE06芯片的控制模块设计与实现
0引言随着多年来网络通讯技术、计算机技术和现场技术的发展,研制具有通信功能的控制模块被相关学者普遍重视。
CAN总线是在上世纪80年代后期被研发出来,初期在车辆中作为C级网络使用,之后拥有29位的规程再次被修订。
其有着优良的工作性能,非常适合于较为复杂的工作环境。
与其他同类网络比较,设计思想独特,网络的数据传输有着突出的可靠性、灵活性和实时性。
KE06芯片是飞思卡尔Kinetis E系列产品,具备增强的ESD/EMC性能,适用于高电气噪声环境中对成本和高可靠性要求较高的器件应用,在恶劣电器噪声环境下拥有高可靠性和鲁棒性。
因此,本文提出了基于CAN总线和KE06芯片的控制模块设计,能够保证控制模块在具有强大功能的同时,实现节点间的相互通信。
相关联机调试验证了控制模块之间通信的有效性和可靠性。
1CAN总线研究分析1.1CAN总线拓扑和物理层CAN是一种线性总线,面向比特流,采用CSMA/CD 总线访问方法及错误识别。
所有控制器要求在比特时间内作出反应,因此总线长度越小,比特率就越高。
CAN的ISO标准对于比特率≥250kbit(高速CAN,C 级网)的数据传输,规定采用了绞合双绝缘导线。
作为实际的线形总线,用最长30cm的分支线接到每个控制器上。
总线的两末端用波阻抗接到双绝缘导线传输线上,典型的值约为120欧姆,如图1所示。
当双绝缘导线传输线中断或线芯短路时,总线就断开。
———————————————————————作者简介:陈小虎(1986-),男,硕士,讲师,主要研究方向为汽车电子技术应用和汽车专业教学改革。
5)判定故障原因,若是没有则要重新观察现象,若是判定准确就实现输出。
值得一提的是,在对比记录模型的过程中,要从实践中总结的故障信息以及对应关系予以综合分析,并且抽象出不同的故障信息,一定程度上提高隶属程度分析的效果[10]。
4结束语总而言之,在科学技术和计算机软件技术全面融合的时代背景下,要整合智能技术体系,就要将电气自动化项目和应用管理结构进行融合,全面推动自动化控制领域的发展进程。
飞思卡尔智能车各模块原理及元器件
飞思卡尔智能车各模块原理及元器件在准备比赛的过程中,我们小组成员经过分析讨论,对智能车各模块的元器件使用方面做如下说明:1、传感器模块:路径识别模块是智能车系统的关键模块之一,目前能够用于智能车辆路径识别的传感器主要有光电传感器和CCD/CMOS传感器。
光电传感器寻迹方案的优点是电路简单、信号处理速度快,但是其前瞻距离有限;CCD 摄像头寻迹方案的优点则是可以更远更早地感知赛道的变化,但是信号处理却比较复杂,如何对摄像头记录的图像进行处理和识别,加快处理速度是摄像头方案的难点之一。
在比较了两种传感器优劣之后,考虑到CCD传感器图像处理的困难后,决定选用应用广泛的光电传感器,相信通过选用大前瞻的光电传感器,加之精简的程序控制和较快的信息处理速度,光电传感器还是可以极好的控制效果的,我们使用11个TK-20型号的光电传感器。
2、驱动模块:驱动电路的性能很大程度上影响整个系统的工作性能。
电机驱动电路可以用MC33886驱动芯片或者用MOS管搭建H桥驱动电路。
MC33886体积小巧,使用简单,但由于是贴片的封装,散热面积比较小,长时间大电流工作时,温升较高,如果长时间工作必须外加散热器,而且MC33886的工作内阻比较大,又有高温保护回路,使用不方便。
采用MOS管构成的H桥电路,控制直流电机紧急制动。
用单片机控制MOS管使之工作在占空比可调的开关状态,精确调整电动机转速。
这种电路由于MOS管工作在饱和截止状态,而且还可以选择内阻很小的MOS管,所以效率可以非常高,并且H桥电路可以快速实现转速和方向控制。
MOS管开关速度高,所以非常适合采用PWM调制技术。
所以我们选择了用MOS管搭建H桥驱动电路。
3、电源模块:比赛使用智能车竞赛统一配发的标准车模用7.2V 供电,而单片机系统、路径识别的光电传感器、光电码编码器等均需要5V电源,伺服电机工作电压范围4V到6V(为提高伺服电机响应速度,采用7.2V 供电),直流电机可以使用7.2V 蓄电池直接供电,我们采用的电源有串联型线性稳压电源(LM2940、7805等)和开关型稳压电源(LM2596)两大类。
飞思卡尔单片机AD功能模块课件

加快AD转换速度
通过优化硬件设计和配置,例如选择更高转换速率的 ADC器件,或者在软件中实现并行处理和快速算法来加 快AD转换的速度。
提高电源稳定性
通过优化电源设计和供电方式,例如使用线性稳压器降低 电源电压的波动,或者在软件中实现电源监控和保护机制 来提高电源的稳定性。
06 未来展望与研究方向
AD功能模块的技术发展趋势
飞思卡尔单片机AD 功能模块课件
目录
• 飞思卡尔单片机简介 • AD功能模块概述 • 飞思卡尔单片机AD功能模块详解 • AD功能模块的应用实例 • AD功能模块常见问题与解决方案 • 未来展望与研究方向
01 飞思卡尔单片机简介
单片机的基本信息
定义
单片机是一种集成电路芯片,采用超大规模集成电路技术将 CPU、随机存储器、程序存储器、定时器/计数器、串行通信 接口等集成在一块芯片上,构成一个微型的计算机系统。
B
C
可靠性高
飞思卡尔单片机经过严格的质量控制和可靠 性测试,能够在恶劣的环境条件下稳定工作 。
开发工具丰富
飞思卡尔单片机提供了丰富的开发工具和软 件库,方便用户进行开发和调试。
D
飞思卡尔单片机的应用领域
智能仪表
飞思卡尔单片机广泛应 用于各种智能仪表,如 智能电表、智能水表等 。
工业控制
由于其高性能和可靠性 ,飞思卡尔单片机在工 业控制领域也有广泛的 应用。
AD转换器出现。
集成化
随着物联网和嵌入式系统的发展,对设备的功耗要求 也越来越高,未来将会有更低功耗的AD转换器出现。
AD功能模块的应用前景与挑战
应用前景
随着物联网和智能化的发展,AD功能模块的应用前景非常广泛,如智能家居、 智能仪表、医疗设备等领域都有广泛的应用。
Freescale Kinetis E 系列 KE06 微控制器开发板用户指南说明书
Freescale Semiconductor User’s Guide1FRDM-KE06 hardware overviewThe FRDM-KE06 Freedom development platform microcontroller board is assembled with the following features:•Kinetis E series KE06 MCU in an 80-pin LQFP package•On-board serial and debug adapter (OpenSDA)•I/O headers for easy access to MCU I/O pins •Freescale inertial sensor, MMA8451Q •Reset push button •RGB LED•Infrared communication •One thermistor•Motor control function for simple BLDC motor control on APMOTOR56F8000E •CAN communication Figure 1 shows a block diagram of the FRDM-KE06 board.Document Number:FRDMKE06UGRev. 0, 03/2014Contents1.FRDM-KE06 hardware overview . . . . . . . . . . . . . . . . 12.FRDM-KE06 hardware description . . . . . . . . . . . . . . 23.Serial and Debug Adapter (OpenSDA) . . . . . . . . . . . 4Freedom KE06 User’s Guideby: Freescale Semiconductor, Inc.FRDM-KE06 hardware descriptionFigure1. FRDM-KE06 block diagramThe FRDM-KE06 features two microcontrollers, the target MCU and a serial and debug adapter (OpenSDA) MCU. The target MCU is a Kinetis E series KE06 family device. The OpenSDA MCU is a Kinetis K series K20 family device, the K20DX128VFM5.2FRDM-KE06 hardware description2.1Power supplyThe FRDM-KE06 offers a design with multiple power supply options. It can be powered from the USB connector, the V IN pin on the I/O header, an off-board 1.71-3.6V supply from the 3.3V pin on the I/O header or 3.3V from motor control board. The USB and V IN supplies are regulated on-board using a 3.3V linear regulator to produce the main power supply. The other two sources are not regulated on-board. Note that KE06 on FRDM board can be powered by 5V or 3.3V.The following figure shows the schematic drawing for the power supply inputs and the on-board voltage regulator.FRDM-KE06 hardware descriptionFigure 2. FRDM-KE06 power supplyTable 1 provides the operational details and requirements for the power supplies.Note that the OpenSDA circuit is only operational when a USB cable is connected and supplying power to J6. However, the protection circuitry is in place to allow multiple sources to be powered at once.Table 1. Power supply requirementsSupply Source Valid RangeOpenSDA Operational?Regulated on-board?OpenSDA USB (J6)5VYes Yes V IN Pin on I/O header 4.3-9V Yes Yes 3.3V Pin on I/O header 1.71-3.6V Yes No 3.3V Pin on motor control header3.3VYesNoTable 2. Power suppliesPower Supply Name DescriptionVDD_PERIPHPeripheral power supply, including RGB LED, Key buttons, infrared, thermistor, reset circuit.J14 Pin1&2 connected, 3.3V power supply;J14 Pin2&3 connected, 5V power supply.Serial and Debug Adapter (OpenSDA)Notes:1.J9 and J10 are not populated by default on the production version. The two pins of these headers are shorted together by 0 ohm resistor R12 and R26 on the PCB. To measure the energyconsumption of either the KE06 or the OpenSDA MCU, the 0 ohm resistor between these pins must first be cut. A current probe or a shunt resistor and voltage meter can then be applied to measure the energy consumption on these rails. When the MCU current measurement is done, this 0 ohm resistor can be soldered on again.2.To better get ADC accuracy on KE06, it is recommended that a 0 ohm resistor R13 be soldered on. Ensure there is no power supply from P3V3_MOTOR and P3V3 sourced from I/O headers.3Serial and Debug Adapter (OpenSDA)OpenSDA is an open-standard serial and debug adapter. It bridges serial and debug communications between a USB host and an embedded target processor as shown in Figure 3.VDD_KE06KE06 MCU power supply.Header J9 provides a convenient means for KE06 energy consumption measurements.Header J14 for KE06 power supply selection: 3.3V or 5V.J14 Pin1&2 connected, 3.3V power supply,J14 Pin2&3 connected, 5V power supply.P3V3_SDAOpenSDA circuit power supply. Can be 3.3V only.Header J10 provides a convenient means for K20 energy consumption measurements.P5V_SDA INPUT [J6 Pin1] Input 5V Power supplied from the OpenSDA USB connector. P5-9V_VIN INPUT [J4 Pin16] Power supplied from the V IN pin of the I/O headers.P3V3_MOTOR INPUT [J2 Pin13] Input 3.3V power supplied from motor control header.P5V_USB OUTPUT[J4 Pin10] Output 5V to the I/O headers.Sourced from J6 USB (P5V_SDA) supply through a back drive protection Schottky diode.Table 2. Power suppliesSerial and Debug Adapter (OpenSDA)Figure3. OpenSDA block diagramOpenSDA is managed by a Kinetis K20 MCU built on the ARM® Cortex™-M4 core. The OpenSDA circuit includes a status LED (D4) and a reset pushbutton (SW1). The pushbutton asserts the reset signal to the KE06 target MCU. It can also be used to place the OpenSDA circuit into Bootloader mode by holding down the reset pushbutton while plugging the USB cable to USB connector J6. Once the OpenSDA enters bootloader mode, other OpenSDA applications such as debug app can be programmed. SPI and GPIO signals provide an interface to the SWD debug port of the KE06. Additionally, signal connections are available to implement a UART serial channel. The OpenSDA circuit receives power when the USB connector J6 is plugged into a USB host.3.1Debugging InterfaceSignals with SPI and GPIO capability are used to connect directly to the SWD of the KE06. These signals are also brought out to a standard 10-pin (0.05”) Cortex Debug connector (J7) as shown in Figure 4. It is possible to isolate the KE06 MCU from the OpenSDA circuit and use J7 to connect to an off-board MCU. To accomplish this, cut the 0 ohm resistor R58. This will disconnect the SWD_CLK pin to the KE06 so that it will not interfere with the communications to an off-board MCU connected to J7.When KE06 on FRDM board is 5V powered, and the OpenSDA is power off, there need to connect an external debugger to debug KE06 on board.Serial and Debug Adapter (OpenSDA)Figure4. SWD debug connector to KE063.2Virtual Serial PortA serial port connection is available between the OpenSDA MCU and UART1 pin PTC7 (TXD1) and PTC6 (RXD1) of KE06. Several of the default OpenSDA applications provided by Freescale, including the MSD Flash Programmer and the P&E Debug Application, provide a USB Communications Device Class (CDC) interface that bridges serial communications between the USB host and this serial interface on the KE06.3.3KE06 Microcontroller3.3.1Clock SourceThe Kinetis KE06 microcontrollers feature an on-chip oscillator compatible with two ranges of input crystal or resonator frequencies: 32 kHz (low frequency mode), 4-20 MHz (high frequency mode).The KE06 on the FRDM-KE06 is clocked from an 8 MHz crystal.3.3.2Serial PortThe serial port interface signals used with OpenSDA are UART1 pin PTC7 (TXD1) and PTC6 (RXD1). These signals are also connected to I/O header J1.3.3.3ResetThe PTA5/RESET signal on the KE06 is connected externally to a pushbutton SW1. The reset button can be used to force an external reset event in the target MCU. The reset button can also be used to force the OpenSDA circuit into bootloader mode when plugging the USB cable to J6. See Section3, “Serial and Debug Adapter (OpenSDA)” section for more details.Serial and Debug Adapter (OpenSDA)3.3.4DebugThe sole debug interface on all Kinetis E Series devices is a Serial Wire Debug (SWD) port. The primary controller of this interface on the FRDM-KE06 is the onboard OpenSDA circuit. However, a 2x5-pin (0.05”) Cortex Debug connector, J7, provides access to the SWD signals for the KE06 MCU. The following table shows SWD connector signals description for KE06:3.4ThermistorOne thermistor (RT1) is connected to two ADC inputs (PTF4/ADP12, PTF5/ADP13) of KE06 for evaluating the ADC module.Figure 5. Thermistor connectionTable 3. ARM JTAG/SWD mini Connector DescriptionPin FunctionConnection to KE061VTref 3.3V or 5V KE06 power supply (VDD_KE06)2SWDIO/TMS PTA4/SWD_DIO 3GNDGND4SWDCLK/TCK PTC4/SWD_CLK 5GND GND 6SWO/TDO NC 7NC NC 8TDI NC 9NC NC10RESETPTA5/RESETSerial and Debug Adapter (OpenSDA)3.5Infrared PortOne infrared Rx port and one Tx port (as shown in the following figure) are connected to ACMP0 input pin (ACMP0_IN1) and UART0 TXD0 pin of KE06 to demonstrate the capability of SCI0 modulated by a flextimer to generate infrared signals and use ACMP0 as a filter to receive the SCI data via infrared signal.Figure6. Infrared connection3.6Key buttonsTwo key buttons are connected to PTH3/4 to demonstrate KBI function of KE06, which can capture both falling edge and rising edge of key button input, as shown in the following figure.Serial and Debug Adapter (OpenSDA)Figure7. Key buttons connection3.7Three-axis accelerometerA Freescale MMA8451Q low power, three-axis accelerometer is interfaced through an I2C bus and two GPIO signals as shown in the following table. By default, the I2C address is 0x1D (SA0 pulled high).Table4. Accelerometer signal connectionsMMA8451Q KE06SCL PTA3SDA PTA2INT1 PTD4INT2 PTD3Serial and Debug Adapter (OpenSDA)Figure8. Accelerometer connection3.8RGB LEDThree PWM-capable pins are connected to a red, green, blue LED. The signal connections are shown in the table below.Table5. RGB LED Signal ConnectionsRGB LED KE06Red Cathode PTG5/FTM2CH3Green Cathode PTG6/FTM2CH4Blue Cathode PTG7/FTM2CH5Serial and Debug Adapter (OpenSDA)Figure9. GB LED connection3.9CANThe CAN phy on KE06 FRDM board is 3.3V powered.Table6. CAN signal connectionCAN Phy KE06D CAN_TXR CAN_RXSerial and Debug Adapter (OpenSDA)Figure10. CAN3.10Input/Output HeadersThe KE06 microcontroller is packaged in an 80-pin LQFP. Some pins are utilized in on-board circuitry, but many are directly connected to one of four I/O headers (J1, J2, J3, J4 and J5). J1 and J2 also function as motor control headers to provide access to a motor control board such as simple BLDC motor driving board APMOTOR56F8000E.Serial and Debug Adapter (OpenSDA)Figure11. I/O headers3.11Arduino CompatibilityThe I/O headers on the FRDM-KE06 are arranged to allow compatibility with peripheral boards (known as shields) that connect to Arduino and Arduino-compatible microcontroller boards. The pins on the headers share the same mechanical spacing and placement as the I/O headers on the Arduino Uno Revision 3 board design. See Figure11 for compatible signals.Document Number:FRDMKE06UG Rev. 003/2014Information in this document is provided solely to enable system and software implementers to use Freescale products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits based on the information in this document.Freescale reserves the right to make changes without further notice to any products herein. Freescale makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in Freescale data sheets and/or specifications can and do vary in different applications, and actual performance may vary over time. All operating parameters, including “typicals,” must be validated for each customer application by customer’s technical experts. Freescale does not convey any license under its patent rights nor the rights of others. Freescale sells products pursuant to standard terms and conditions of sale, which can be found at the following address: /SalesTermsandConditions.How to Reach Us:Home Page:Web Support:/supportFreescale, the Freescale logo, and Kinetis, are trademarks of FreescaleSemiconductor, Inc., Reg. U.S. Pat. & Tm. Off. All other product or service names arethe property of their respective owners. ARM and Cortex are the registered trademarksof ARM Limited. ARMCortex-M4 is the trademark of ARM Limited.© 2014 Freescale Semiconductor, Inc.。
EN-FSROB 飞思卡尔智能车各模块调试指南
EN-FSROB飞思卡尔智能车各模块调试指南1、下载Motor文件夹下面的程序,测试电机驱动模块,系统控制底板:蜂鸣器、按键、OLED 接口及XS128最小系统;步骤:(1)连线:系统底板P11插针P7、P5、P3、P1/2接电机驱动模块的排针7、5、3、1/2;(2)连接电机,调节4、3按键,可发现电机转速及转向发生变化;(3)分别按下1、2按键,可关闭、打开蜂鸣器,并可观察OLED液晶显示数据是否正常;2、下载A_CarTest文件夹下面的程序,测试XS128核心板串口排针及系统控制底板舵机控制电路:步骤:(1)上电,调节电位器,万用表测试P10舵机插接排针的6V、GND引脚电压调整至6V;(2)XS128核心板UART排针通过杜邦线插上蓝牙模块,注意插线顺序;(3)手机安装蓝牙串口测试工具,并打开,通过摇动手机左右晃动可发现舵机旋转;3、CC2500模块测试:1)将T103模块插入电脑,打开《CC2500无线串口数据传输下载软件》文件夹下的下载软件;给T103模块下载程序2)给XS128下载CC2500测试程序;3)插上CC2500模块到底板,把另外一块CC2500模块通过转接座插入到T103模块,并打开串口调试助手,并按照下图进行配置:4)此时,通过串口调试助手发送数据可在底板OLED模块的R_Buff区显示出来发送的数据,然后按下地板上的四个按键中的其中一个,可在OLED模块的S_Buff区显示所按下的按键号并通过CC2500模块传送到串口调试助手;4、CCD测试;1)下载CCD测试程序;2)连接CCD传感器到智能车底板的P3或P4接口;3)电脑安装PL2303驱动,插入USB-TTL小板,并且用杜邦线将USB-TTL小板与XS128核心板连接;4)打开智能车调试助手,按如下方法配置,配置好打开串口可发现数据上传到调试助手上面;5、摄像头测试;1)下载OV7620测试程序;2)正确连接摄像头到底板上的P7OV7620转接接口;3)电脑安装PL2303驱动,插入USB-TTL小板,并且用杜邦线将USB-TTL小板与XS128核心板连接;4)打开智能车调试助手,按如下方法配置,配置好打开串口可发现摄像头所拍照片上传到调试助手上面;6、编码器测试;编码器改装,褐色——VCC;蓝色——GND;白色——IN;。
飞思卡尔学习板简介
飞思卡尔学习板可与下面的配件配套飞思卡尔学习板 + 慢速(步进)电机驱动 + 底盘 + 各种液晶显示 + 各种传感器配件名称价格/个同时最大可配个数备注飞思卡尔学习板388 1 主板慢速电机8.9 10 两个电机接H桥,其他为半桥直流电机 3.8 10 两个电机接H桥,其他为半桥步进电机 6.8 2 两个步进电机可同时使用轮子 3.8 2 与慢速电机配套慢速电机紧固件(含紧固螺丝)5.5 2 与慢速电机步进电机配套步进电机紧固件(含紧固螺丝)3.5 2 与步进电机步进电机配套底盘19 2与主板以及慢速、步进等电机配套模拟摄像头OV5116158 1 与主板接口配套模拟摄像头OV7950109 1 与主板接口配套数字摄像头OV7620138 1 与主板接口配套CCD摄像头118 1 通过转接板与主板接口配套电磁传感器28 15 与主板接口配套红外传感器12 15 与主板接口配套激光传感器模块(1接收对3个发射)119 1 与主板接口配套MC9S12XS128MAL单片机最小系统板105 1 与主板接口配套MC9S12XS128MAA单片机最小系统板99 1 与主板接口配套STC89C516RD+单片机最小系统板39 1 与主板接口配套12864液晶48 1 采用并口通信1602液晶12 1 采用并口通信5110液晶18 1 采用串口通信矩阵键盘15 2 与主板接口配套3011舵机139 4 与主板接口配套PWM1,PWM3,WPM5,PWM7小舵机19 4 与主板接口配套(长期使用正极电源需接5v)PWM1,PWM3,WPM5,PWM7 900mah/7.2v电池28 1 固定孔与底盘配套7.2v充电器12 1 与900mah/7.2v电池配套注:以上所列的“同时最大可配个数”是指一块板子可同时使用的配件数目。
手创科技研发团队:十月磨一剑,飞思卡尔综合学习板。
飞思卡尔学习板是广州手之创电子科技结合现有产品以及根据客户的反馈建议所设计的,本版适合中高职,本科及研究等学生使用,本版更适合有志于参加智能车比赛的选手。
飞思卡尔KE06功能模块介绍
上电复位操作。3,LVD 重复操作。4,低电压警告
系统杂项控制(MCM) 提供了大量的多种多样的控制功能
外设桥接器(AIPS)
转换 ARM AHB 接口为一个接口访问多数的外 设,支持 8 位,16 位,32 位数据通道宽度的外设
插槽
位处理引擎(BME) 支持读-修改-写内存的操作
看门狗(WDOG) 系统故障时重启系统
4低电压警告系统杂项控制mcm提供了大量的多种多样的控制功能转换armahb接口为一个接口访问多数的外外设桥接器aips设支持位16位32位数据通道宽度的外设插槽位处理引擎bme支持读修改写内存的操作看门狗wdog系统故障时重启系统armcortexm0cortexm系列最新的成员兼容m3m432指令集48mhzcpu频率嵌套式中断控制nvic支持多个外部中断一个不可屏蔽中断和多个优48个矢量中断源非核中断源32异步唤醒中断控制通过各种异步中断将系统从stop模式中唤醒
ARM Cortex_M0+
Cortex_M 系列最新的成员,兼容 M3、M4。32 位 指令集,48MHz CPU 频率
嵌套式中断控制(NVIC) 支持多个外部中断,一个不可屏蔽中断,和多个优
先级。有 48 个矢量中断源,非核中断源 32 个
异步唤醒中断控制 (AWIC)
单循环 I/O 端口 (I/OPROT)
通过各种异步中断将系统从 STOP 模式中唤醒。唤 醒源有:RESET 管脚,低电压警告,键盘中断,IRQ 管脚,不可屏蔽管脚,ADC,ACMP, I2C, UART, SPI, RTC, MSCAN. 高速单循环访问外设, 快速 GPIO 在 IOPORT 接口上实现
内存和内存 接口
调试接口
支持一个调试接口:串行线调试(SWD)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过各种异步中断将系统从 STOP 模式中唤醒。唤 醒源有:RESET 管脚,低电压警告,键盘中断,IRQ 管脚,不可屏蔽管脚,ADC,ACMP, I2C, UART, SPI, RTC, MSCAN. 高速单循环访问外设, 快速 GPIO 在 IOPORT 接口上实现
内存和内存 接口
调试接口
支持一个调试接口:串行线调试(SWD)
数字—模拟比较(DAC)
1,可选 FTM 源时钟,支持独立的定时器时钟高达
48MHz,可编程分频器。2,输入捕获,输出比较,
多功能定时器(FTM) 边缘对齐和中心对齐 PWM 模块。3,PWM 输出的
软件控制。4,可配置电压极性。5,可编程中断输
入捕获,参考比较,溢出计数器,或者检测到的故障状
态
1,一个通用的中断定时器。2,触发性 ADC 转换器
(MSCAN)
协议。MSCAN 使用先进的缓冲装置导致可预测实
时行为并简化应用程序软件。
通用输入/输出(GPIO) 多达 71 个通用 I/O。
键盘中断(KEI)
该设备有 2 个 32 位键盘中断模块,多达 64 个键盘
中断输入依据程序包可用
中断(IRQ)
IRQ 模块提供一个可屏蔽中断输入
二、低功耗性能
测。7,软件可选的应答信号。8,总线繁忙的检
测。9,一般电话识别。10,10 位地址伸展。
11,支持系统管理总线(SMBus)规范,版本 2。12,
可编程故障输入滤波器。13,低功耗模式唤醒从机
地址匹配
3 个 UART 模块。功能特点:1,全双工,标准不返
回 0 模式。2,缓冲发射机和接收机可以独立操作。
flash
128kb flash
FMC 是一个程序加速单元,它在内核和 32 位闪存
之间提供接口。它包含一个 32 位推测缓冲区和一
Flash 内存控制器(FMC) 个 32 字节的高速缓存
(可以加速指令取得和 flash 访问)
SRAM
16kb 系统内部 RAM
时钟模块
内部时钟源(ICS)
包含一个内部参考时钟和一个频率锁定环(FLL) 关键功能:1,FLL 可以微调精度。2,内部或外部 参考时钟可以控制 FLL。3,参考分频器提供外部 时钟。4,内部参考时钟或外部参考时钟可被 MCU 选做时钟源。5,被选中的时钟源可被划分:如果 OSC_CR[RANGE]=0,可分为 1,2,4,8,16,32,64,128.; 如果 OSC_CR[RANGE]=1,可分为 32,64,128,256,512,1024;
2 个 SPI 同步串行总线用于连接到一个外设,SPI
模块提供全双工同步串行接口联系 MCU 和外设
(可以是其他 MCU)。
串行外设接口(SPI) 功能特点:1,主模式和从模式操作。2,全双
工或者单线双向模式。3,可编程传输比特率。
4,缓存传输和接收数据寄存器。5 串行时钟相位和
极性的选择。6,从机选择输出。7,在 wait 模式中
上电复位操作。3,LVD 重复操作。4,低电压警告
系统杂项控制(MCM) 提供了大量的多种多样的控制功能
外设桥接器(AIPS)
转换 ARM AHB 接口为一个接口访问多数的外 设,支持 8 位,16 位,32 位数据通道宽度的外设
插槽
位处理引擎(BME) 支持读-修改-写内存的操作
看门狗(WDOG) 系统故障时重启系统
1,自动测量 16 位分辨率脉冲宽度。2,分开的正
负脉冲宽度测量。3,可编程序触发边缘开始测量。
脉冲宽度计数器(PWT) 4,可编程测量时间间隔在连续交替沿,上升
沿或下降沿之间。5,两个可选时钟源,支持
独立的定时器时钟高达 48MHz。6,4 个可选脉
冲输入。7,在更新脉冲宽度值和计数器溢出时可
编程中断产生
控制 SPI。8,接收数据缓冲区的硬件匹配特性
两个 I2C 模块,通过一个串行数据线和一个串行时
钟线,使得两个线上设备通讯。
功能特点:1,多控制操作。2,软件可编程用于 64
种不同的串行时钟频率之一。3,调用地址识别中
断。4,START 和 STOP 信号产生和检测。5,ቤተ መጻሕፍቲ ባይዱ复
两线式串行总线(I2C) START 信号产生和检测。6,应答信号的产生和检
安全性与完 整性模块
模拟模块
系统振荡器协同一个外部晶振或者共振器,为 MCU
生成一个参考时钟或者总线时钟。
功能:1,支持 32kHz 晶体谐振器(低振幅模式)
系统振荡器(OSC) 2,支持 4—24MHz 谐振器(高振幅模式)
3,自动增益控制在高、低频率范围低功耗模式下
的电源消耗。4,高增益选项在两个频率范围:
ACMP 提供一个电路去比较两个模拟输入电压。
功能:1,操作可用于整个供应电压 2.7V-5.5V.
模拟电压比较(ACMP) 2,片上 6 位分辨率 DAC 可选参考电压VDD或内
部频带间隙。3,可选中断在比较器输出的上升沿,
下降沿,或者两个上升沿、下降沿。4,多达四个
比较器输入。5,可在 Stop 模式中运行
周期中断定时器(PIT) 中断定时器。3,32 位计数器分辩率。4,以总线时
定时/计数 器模块
通讯接口
人机接口
钟频率计时
1,16 位计数器。2,为输入到 16 位预分频器软件选
实时时钟(RTC) 择时钟源(总现时钟,IRC 时钟(31.25~39.0625kHz),
LPO(~1kHz),系统振荡器输出时钟)
飞思卡尔 KE06 功能模块介绍
一、功能模块
系统模块 内核模块
内部资源
系统集成模块(SIM)
SIM 提供系统控制和芯片配置寄存器,主要功能有: 1,重置状态和设备 ID 信息。2,系统互连配置和 特殊管脚的使用。3,管脚重新映射控制。 4,系统时钟控制和时钟分频
电源管理控制(PMC) 1,LVD 系统,在 stop 模式下,可以选择激活。2,
32kHz,4-24MHz。5,电压和频率滤波保证时钟频率
和稳定。6,支持启用 ICS
低功耗振荡器(LPO) PMC 模块包含一个 1kHz 低功耗振荡器作为单独
的低频时钟源在所有模块中
CRC 生成 16/32 位的错误检查 CRC 代码
功能特点:1,硬件 CRC 发生器电路使用一个 16
循环冗余校检(CRC) 位或者 32 位可编程移位寄存器。2,可编程初始种
这个单片机有两种低功耗模式:wait 模式和 stop 模式; 在 wait 模式下:CPU 和 RAM 处于待机状态,其他设备正常开启; 在 stop 模式下:LPO 开启,WDOG、LVD、ICS、OSC、 RTC、ADC、 ACMP 可选择开启,其他设备全部待机。
三、从 stop 模式中唤醒
通过异步唤醒中断控制(AWIC)将系统从 STOP 模式中唤醒。 唤醒源有:RESET 管脚,低电压警告,键盘中断,IRQ 管脚,不可 屏蔽管脚,ADC,ACMP, I2C, UART, SPI, RTC, MSCAN.
ARM Cortex_M0+
Cortex_M 系列最新的成员,兼容 M3、M4。32 位 指令集,48MHz CPU 频率
嵌套式中断控制(NVIC) 支持多个外部中断,一个不可屏蔽中断,和多个优
先级。有 48 个矢量中断源,非核中断源 32 个
异步唤醒中断控制 (AWIC)
单循环 I/O 端口 (I/OPROT)
通用异步接收/发射器 3,可编程波特率。4,中断驱动或者轮询操作 5,
(UART)
硬件奇偶性产生和检测。6,可编程 8 位或者 9 位
字长度。7,可编程的 1 位或 2 位 stop 信号。8,通
过闲置线或地址标记接受唤醒。9,可选的发射机
极性。
可升级控制器局域网 MSCAN 是一个遵循 Bosch 规范定义的 CAN2.0A/B
子值和多项式。3,选择最终 CRC 的反演结果。4,,32
位 CPU 寄存器可编程接口
WDOG 监控内部系统操作并且强制重置如果发生
看门狗(WDog)
故障。他可以在一个独立的 1kHz 低功耗振动源下
工作,并且带有一个可编程刷新窗口去检测偏差在
程序流或者系统频率中。
模拟—数字转换(ADC) 12 位的逐次逼近模拟数字转换模块多大 16 个通道