液压控制--第5章 电液伺服阀
电液伺服阀

• 这是个流量控制型伺服阀:由于功率
阀芯台肩控制棱边与阀套窗孔的相应棱边 的轴向尺寸是按零遮盖状态精密配合的, 所以输出流量的方向取决于控制电流的极 性,而输出流量的大小在负载压力恒定的 条件下与控制电流的大小成比例。
相关性能参数见上表
2、vickers喷嘴挡板阀
图5-26 SM4型阀内部结构 1-滤油器 2-喷嘴 3-衔铁 4-线圈 5-永久磁铁 6-导磁体 7-弹簧管 8-挡板
英国道蒂公司
6、DOWT型三级电液流量伺服阀
三级伺服阀通常是以通用型两级伺服 阀为前置级并以滑阀式控制阀为功率 级所构成。第三级的功率滑阀(或称 主滑阀)依靠位置反馈定位,一般为 电气反馈或力反馈。
电反馈调节方便,改变额定流量 及频率响应容易,适应性大,灵活性 好,是三级阀的主要优点。英国道蒂 公司制造的前置级采用两级双喷嘴挡 板力反馈伺服阀或射流管力反馈伺服 阀。
• 输入的控制电流越大,阀芯的位移量也越 大,节流边开度就越大,输出的流量就越 多,执行机构运动的速度就越快(流量型 控制伺服阀)。如果输入控制电流的极性 相反,则衔铁作顺时针方向偏转,使阀芯 右移,压力油P由B腔进入执行机构,使其 向相反方向运动。
3、Abex400型射流管式伺服阀
美国阿贝克斯400 型射流管式伺服阀
射流管的侧面装有弹簧板及反馈弹簧丝5,其末端插入阀芯中间的小槽内,阀芯推动 反馈弹簧丝5,构成对力矩马达的力反馈。
力矩马达借助薄壁弹簧片实现对液压部件的密封隔离。
射流管伺服阀优点: ① 射流管阀的最小通流尺寸约为0.2mm,而喷嘴挡板式伺服阀
为0.025~0.10mm。因此射流管的抗污染能力强,可靠性高、寿 命长。 • 伺服阀的抗污染能力,一般是由其结构中的最小通流尺寸所决定的。 而在多级伺服阀中,前置级油路中的最小尺寸成为决定性因素。 • ② 射流管阀的压力效率和容积效率高,可以产生较大的控制压力和 流量,这就提高了功率阀的驱动力,增大了功率阀的抗污染能力。 • ③ 从前置级磨蚀对性能的影响来看,射流管喷嘴端面和接受端面的 磨损,对性能的影响小,因此工作稳定,零漂小,寿命长。 射流管阀的缺点:是频率响应低,零位泄漏流量大,低温特性差,加工
液压伺服控制课后题答案大全王春行版

第二章 液压放大元件 习题1. 有一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,径向间隙m r c 6105-⨯=,供油压力Pa p s 51070⨯=,采用10号航空液压油在40C ︒工作,流量系数62.0=d C ,求阀的零位系数。
s pa ⋅⨯=-2104.1μ3/870m kg =ρ 解:对于全开口的阀,d W π=由零开口四边滑阀零位系数2. 已知一正开口量m U 31005.0-⨯=的四边滑阀,在供油压力Pa p s 51070⨯=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。
解:正开口四边滑阀零位系数ρsd q p wc k 20= ssd co p p wuc k ρ=ρsd c p wuc q 2=3. 一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,供油压力Pa p s 510210⨯=,最大开口量m x m 30105.0-⨯=,求最大空载稳态液动力。
解:全开口的阀d W π= 最大空载液动力:4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210⨯=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量m x 0。
计算时取流量系数62.0=d C ,油液密度3/870m kg =ρ。
解:零开口四边滑阀的流量增益:故m d 31085.6-⨯=全周开口滑阀不产生流量饱和条件5. 已知一双喷嘴挡板阀,供油压力Pa p s 510210⨯=,零位泄漏流量s m q c /105.736-⨯=,设计计算N D 、0f x 、0D ,并求出零位系数。
计算时取8.00d =C ,64.0df =C ,3/870m kg =ρ。
解:由零位泄漏量ρπs f N df c p X D C q 02⋅⋅⋅= 即160Nf D X =得: mm p C q D s df cN 438.0216=⋅⋅=ρπ 则:若:8.00=d df C C ,1610=Nf D X 则mm D D N 193.044.00== 第三章 液压动力元件 习题1. 有一阀控液压马达系统,已知:液压马达排量为rad m D m /10636-⨯=,马达容积效率为95%,额定流量为s m q n /1066.634-⨯=,额定压力Pa p n 510140⨯=,高低压腔总容积34103m V t -⨯=。
电液伺服系统
电液伺服系统电液伺服系统是一种将电气信号转换为液压能量的控制系统。
它通过控制液压阀的开启和关闭来调节液压执行器的工作状态,从而实现对机械装置的精确控制。
本文档将详细介绍电液伺服系统的结构、工作原理、常见问题及解决方案等内容。
一、系统结构1.1 主机部分主机部分是电液伺服系统的核心组成部分,包括电液转换器、伺服阀、传感器等。
其中,电液转换器将电信号转换为液压能量,伺服阀通过控制液压流量来控制液压执行器的运动,传感器用于监测执行器的位置和速度。
1.2 液压执行器液压执行器是电液伺服系统中的重要组成部分,主要包括液压缸和液压马达两种。
液压缸可将液压能量转换为机械能,实现直线运动;液压马达则可将液压能量转换为机械能,实现旋转运动。
1.3 控制部分控制部分由控制器和信号处理器组成,用于接收、处理和传输控制信号。
控制器可根据输入信号的变化调节伺服阀的开启度,从而实现对电液伺服系统的精确控制。
二、工作原理2.1 系统工作流程电液伺服系统的工作流程一般包括输入信号采样、信号处理、控制指令、伺服阀控制和液压执行器动作等步骤。
具体流程如下:(1)输入信号采样:传感器将液压执行器的位置和速度等信息转换为电信号,并传输给信号处理器。
(2)信号处理:信号处理器对输入信号进行滤波、放大等处理,将其转换为控制系统可识别的信号。
(3)控制指令:控制器根据输入信号的变化相应的控制指令。
(4)伺服阀控制:控制器根据控制指令调节伺服阀的开启度,控制液压系统的流量大小。
(5)液压执行器动作:伺服阀的控制信号作用于液压执行器,使其按照要求的位置和速度进行运动。
2.2 系统控制策略电液伺服系统可采用位置控制、速度控制和力控制等不同的控制策略。
其中,位置控制可实现对执行器位置的精确控制;速度控制可实现对执行器速度的精确控制;力控制可实现对执行器施加的力或扭矩的精确控制。
三、常见问题及解决方案3.1 液压系统压力不稳定可能原因:(1)供油系统压力不稳定。
电液伺服阀原理
电液伺服阀电液伺服阀既是电液转换元件,又是功率放大元件,它能够把微小的电气信号转换成大功率的液压能(流量和压力)输出。
它的性能的优劣对系统的影响很大。
因此,它是电液控制系统的核心和关键。
为了能够正确设计和使用电液控制系统,必须掌握不同类型和性能的电液伺服阀。
伺服阀输入信号是由电气元件来完成的。
电气元件在传输、运算和参量的转换等方面既快速又简便,而且可以把各种物理量转换成为电量。
所以在自动控制系统中广泛使用电气装置作为电信号的比较、放大、反馈检测等元件;而液压元件具有体积小,结构紧凑、功率放大倍率高,线性度好,死区小,灵敏度高,动态性能好,响应速度快等优点,可作为电液转换功率放大的元件。
因此,在一控制系统中常以电气为“神经”,以机械为“骨架”,以液压控制为“肌肉”最大限度地发挥机电、液的长处。
由于电液伺服阀的种类很多,但各种伺服阀的工作原理又基本相似,其分析研究的方法也大体相同,故今以常用的力反馈两级电液伺服阀和位置反馈的双级滑阀式伺服阀为重点,讨论它的基本方程、传递函数、方块图及其特性分析。
其它伺服阀只介绍其工作原理,同时也介绍伺服阀的性能参数及其测试方法。
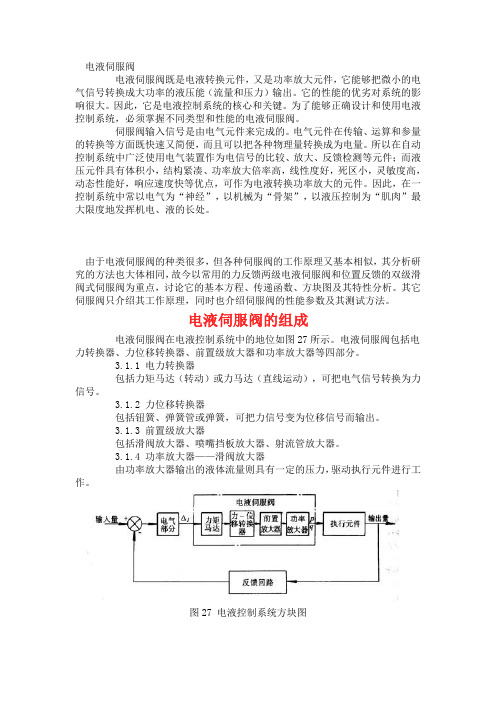
电液伺服阀的组成电液伺服阀在电液控制系统中的地位如图27所示。
电液伺服阀包括电力转换器、力位移转换器、前置级放大器和功率放大器等四部分。
3.1.1 电力转换器包括力矩马达(转动)或力马达(直线运动),可把电气信号转换为力信号。
3.1.2 力位移转换器包括钮簧、弹簧管或弹簧,可把力信号变为位移信号而输出。
3.1.3 前置级放大器包括滑阀放大器、喷嘴挡板放大器、射流管放大器。
3.1.4 功率放大器——滑阀放大器由功率放大器输出的液体流量则具有一定的压力,驱动执行元件进行工作。
图27 电液控制系统方块图电液伺服阀的分类电液伺服阀的分类电液伺服阀的种类很多,根据它的结构和机能可作如下分类:1)按液压放大级数,可分为单级伺服阀、两级伺服阀和三级伺服阀,其中两级伺服阀应用较广。
第五章 液压控制阀

简化符号:
三位四通电液换向阀
应用:高压、大流量的场合。 (q≤1200 L/min)
实物
3、滑阀的中位机能
• 三位的滑阀在中位时各油口的连通方式体现了换 向阀的控制机能,称之为滑阀的中位机能。
不同滑阀机能的滑阀,阀体是通用的,仅阀芯台肩
的尺寸和形状不同。
滑阀机能的应用: 使泵卸载的有H、K、M型;使执行元件停止的有O、M
• 绘方向阀简图。
§5-2 压力控制阀
分类 按用途: 溢流阀 减压阀 顺序阀 压力继电器 按阀芯结构:滑阀 球阀 锥阀 按工作原理:直动式 先导式 工作原理:利用液压力与阀内弹簧力相平衡原 理工作的。
一、 溢流阀
1.溢流阀的功能 功能:利用阀芯上的液压作用力和弹簧力保持平衡, 使阀的进口压力不超过或保持调定值; 保持系统压力恒定,即溢流定压;
q= Cdπd x sinα(2Δp/ρ)1/2 • 球阀 性能与锥阀相同,阀口的压力流量方程 q = Cdπd h 0 (x/R) (2Δp/ρ)1/2
根据用途不同分类
• 压力控制阀 用来控制和调节液压系统液流压力 的阀类,如溢流阀、减压阀、顺序阀等。 • 流量控制阀 用来控制和调节液压系统液流流量 的阀类,如节流阀、调速阀、分流集流阀、比例流 量阀等。 • 方向控制阀 用来控制和改变液压系统液流方向 的阀类,如单向阀、液控单向阀、换向阀等。
(2) 两位三通
职能符号:
A
P
B
作用:控制液流方向
(3) 两位四通
职能符号:
P — 压力油口 O — 回油口 A、B — 分别接执行元件的两腔 作用:控制执行元件换向
(4) 三位四通 职能符号:
作用:换向、停止。
第五章 液压控制阀(方向阀)
二、液压阀的基本共同点及要求
尽管各类液压控制阀的功能和作用不同,
但结构和原理上均具有以下共同点: 1)在结构上都有阀体、阀芯、和操纵机构 组成; 2)在原理上都是依靠阀的启闭来限制、改 变液体的流动或停止,从而实现对系统的 控制和调节作用; 3)只要液体经过阀孔流动,均会产生压力 降低和温度升高等现象,通过阀孔的流量 与通流截面积及阀孔前后压力差有关,即 符合液体流经小孔的流量公式;
第二节 方向控制阀
方向控制阀用以控制液压系统中油液流动的方向或液流 的通与断,可分为单向阀和换向阀两类。 A B 一、单向阀 单向阀有普通单向阀和液控单向阀两种。 单向阀的职能符号 1、普通单向阀 普通单向阀通常简称单向阀,又叫止回阀或逆止阀,只 允许油液正向流动,不允许倒流。
高、中、低压单向阀的工作原理完全一样,
图4-5 双向液压锁结构图 1-弹簧,2-阀芯,3-阀座,4-控制活塞
当压力油从A口流入,对于左侧液控单向阀为正 向流动,同时液压力作用于控制活塞使之向右移 动并推开右侧液控单向阀的阀芯,允许液体反方 向从D口→B口流动;同理,当压力油从B口流入 时,左侧液控单向阀同样允许液体反向流动;当 A口和B口都不通压力油时,相当于两个液压控 单向阀的控制压力同时消失,液控单向阀此时从 功能上等同于普通单向阀,这时无论C口还是D 口的油液存在压力而试图反方向流动都是不允许 的,且阀口的锥形面密封良好,这样与C口和D 口相连接的执行元件的两个容腔被封闭,由于液 体不可压缩,执行元件在正常情况(无泄漏)下 即使受外负载力的作用也可停留在规定的位置上。
2、用箭头符号“↑”表示指向的两油口相
通,但不一定表示液流的实际方向;用截 止符号“⊥”表示相应油口在阀内被封闭。
第5章 电液伺服阀PPT课件
液压伺服系统
第五章 电液伺服阀
Part 5.3.3 稳定性分析
包括两个反馈回路:滑阀位移的力反馈回路
作用在挡板上的压力反馈回路
1、力反馈回路:
Kvf 2mf mf
2、压力反馈回路:
设计时:
K vf 0.25
mf
液压伺服系统
3、力反馈伺服阀的传递函数:
第五章 电液伺服阀
Kt
sXv
Kf rb
I
xvmax06.4110033 1567
不能采用全周开口,取阀芯直径 d5103m
阀杆直径 dr 3103m
按
4
d2dr2
4xvmax
验算,满足要求。
液压伺服系统
第五章 电液伺服阀
2)喷嘴挡板阀主要结构参数的确定:
①根据设计要求,并考虑留有一定的余地,取喷嘴
挡板阀的零位泄漏量 qc 0.45Lmin
第五章 电液伺服阀
力矩马达的分析计算包括: 1)永磁磁路计算 2)电路计算 3)静态特性和动态特性的分析计算
电磁力矩的计算属于永磁磁路计算的一个内容
3、传递函数和静动态分析:
液压伺服系统
第五章 电液伺服阀
Part 5.2.4 永磁动圈式力马达
根据载流导体在磁场中受力而工作的。改变控制线圈电流的大小 和方式,可以得到不同大小和方向的输出力。
根据滑阀流量方程可求出阀的最大开口面积
xvmaxcdQ 0m psax0.6 15 5 2 10 1 0 1 30 6 0 38052.4 01 0 6m 2
根据经验取阀芯行程 xvma x0.41 03m
则滑阀节流窗口面积梯度 02..44 1100 63 6103m
液压伺服系统
《液压伺服控制》(王春行版)课后题答案

第二章 液压放大元件 习题1. 有一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,径向间隙m r c 6105-⨯=,供油压力Pa p s 51070⨯=,采用10号航空液压油在40C ︒工作,流量系数62.0=d C ,求阀的零位系数。
s pa ⋅⨯=-2104.1μ3/870m kg =ρ解:对于全开口的阀,d W π=由零开口四边滑阀零位系数s m p w C K s d q /4.1870/107010814.362.02530=⨯⨯⨯⨯=⋅=-ρ()s p m r K a c c ⋅⨯=⨯⨯⨯⨯⨯⨯⨯=⋅=----/104.4104.13210814.310514.33231223620μπ m p K K r p C K a c q c s dp /1018.332110020⨯==⋅=πρμ2. 已知一正开口量m U 31005.0-⨯=的四边滑阀,在供油压力Pa p s 51070⨯=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。
解:正开口四边滑阀零位系数ρsd q p wc k 20= ssd co p p wuc k ρ=ρsd c p wuc q 2=s m q K cq /67.11005.060/1052330=⨯⨯==--ν s a s c c p m p q K ⋅--⨯=⨯⨯⨯==/1095.51070260/1052312530 m p K K K a c q p /1081.211000⨯==3. 一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,供油压力Pa p s 510210⨯=,最大开口量m x m 30105.0-⨯=,求最大空载稳态液动力。
解:全开口的阀d W π= 最大空载液动力:4.113105.010********.343.043.035300=⨯⨯⨯⨯⨯⨯⨯=⋅⋅=--⋅m s s x p W F4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210⨯=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量m x 0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章 电液伺服阀
本章摘要
电液伺服阀既是电液转换元件,又是功率放大元件。 它能够将输入的微小电气信号转换为大功率的液压信号(流 量与压力)输出。根据输出液压信号的不问,电液伺服阀和 比例阀可分为电液流量控制伺服阀和比例阀和电液压力控 制伺服阀和比例阀两大类。 电液伺服阀控制精度高、响应速度快,是一种高性能 的电液控制元件,在液压伺服系统中得到了广泛的应用。
三级伺服阀 此类阀通常是由一个两级伺服阀作前置级 控制第三级功率滑阀.功率级滑阀阀芯位移通过电气反馈 形成闭环控制,实现功率级滑阀阀芯的定位。三级伺服阀 通常只用在大流量的场合。 按第一级阀的结构形式分类: 可分为:滑阀、单喷嘴挡板阀、双喷嘴挡板阀 射流管 阀和偏转板射流阀。 按反馈形式分类: 可分为滑阀位置反嫂、负载流量反馈和负载压力反馈三 种。 按力矩马达是否浸泡在油中分类: 湿式的可使力矩马达受到油液的冷却,但油液中存在的 铁污物使力短马达持性变坏,干式的则可使力矩马达不受 油液污染的影响,目前的伺服阀都采用干式的。
5.5 其它型式的电液伺服阀简介
一、射流管式两级电液伺服阀
射流管由力矩马达带动偏转。射流管焊接于衔铁上, 并由薄壁弹簧片支承。液压油通过柔性的供压管进入 射流管.从射流管喷射出的液压油进入与滑阀两端控 制腔分别相通的两个接收孔中,推动阀芯移动。射流 管的侧面装有弹簧板板及反馈弹簧丝.共末端插入阀 从中的小槽内,阀芯移动推动反馈弹簧丝.构成对力 矩马达的力反馈。力矩马达借助于薄壁弹簧片实现对 液压部分的密封隔离。
1、力矩马达的工作原理 图2所示为一种常用的永磁动铁式力矩马达工作原理 图,它由永久磁铁、上导磁体、下导磁体、衔铁、控 制线圈、弹簧管等组成。衔铁固定在弹簧管上端,由 弹簧管支承在上、下导磁体的中间位置,可绕弹簧管 的转动中心作微小的转动。衔铁两端与上、下导磁体 (磁极)形成四个工作气隙①、②、⑤、①。两个控制 线圈套在衔铁之上。上、下导磁体除作为磁极外,还 为永久磁铁产生的极化磁通和控制线圈产生的控制磁 通提供磁路。
5.6 电液伺服阀的主要性能参数
一、静态特性
电液流量伺服阀的静态性能,可根据测试所得到负载流量特性、 空载流量特性、压力特性、内泄漏特性等曲线等性能指标加以 评定。包括 1、负载流量特性 2、空载流量特性 流量曲线非常有用,它不仅给出阀的极性、额定空载流量、名 义流量增益,而且从中还可以得到阀的线件度、对称度、滞环、 分辨率,并揭示阀的零区特性。 3、压力特性 压力特性曲线是输出流量为零(两个负载油门关闭)时,负载压 降与输入电流呈回环状的函数曲线。 4、内泄漏特性 5、零漂
2、力矩马达的电磁力矩
通过力矩马达的磁路分析可以求出电磁力矩的计算公 式。从磁路分析知电磁力矩是非线性的,因此为保证 输出曲线的线性,往往设计成可动位移和气隙长度只 比小于三分之一,控制磁通远远小于极化磁通。
三、 永磁动圈式力马达
图示为永磁动式力马达的结构原理。力马达的可动线 圈悬置于作气隙中,永久磁铁在工作气隙中形成极化 磁通,当控制电流加到线圈上时,线圈就会受到电磁 力的作用而运动。线圈的运动方向可根据磁通方向和 电流方向按左手定则判断。线圈上的电磁力克服弹簧 力和负载力,使线圈产生一个与控制电流成比例的位 移。
5.2 力矩马达
在电液伺服阀中力矩马达的作用是将电信号转换为机械 运动,因而是一个电气—机械转换器。电气—机械转换器 是利用电磁原理工作的。它由永久磁铁或激磁线圈产生极 化磁场。电气控制信号通过控制线圈产生控制磁场,两个 磁场之间相互作用产生与控制信号成比例并能反应控制信 号极性的力或力矩,从而使其运动部分产直线位移或角位 移的机械运动。 一、力矩马达的分类及要求 1、力矩马达的分类 1)根据可动件的运动形式可分为:直线位移式和角位 移式,前者称力马达,后者称力矩马达。 2)按可动件结构形式可分为:动铁式和动圈式两种。 前者可动件是衔铁,后者可动件是控制线圈。
二、 动态特性 主要是用频率响应和瞬态响应表示。
思考题
1、电液伺服阀由哪几部分组成?各部分的作用是什么? 2、为什么喷嘴挡板式力反馈两级伺服阀在稳态时,挡板在中 位附近工作?有什么好处?
四、动铁式力矩马达与动圈式力矩马达的比较
1)动铁式力矩马达因磁滞影响而引起的输出位移滞后比动圈式力 马达大。 2)动圈式力马达的线性范围比动铁式力矩马达宽。因此.动圈式 力马达的工作行程大,而动铁式力矩马达的工作行程小。 3)在同样的惯性下,动铁式力矩马达的输出力矩大,而动圈式力 马达的输出力小。动铁式力矩马达因输出力矩大,支承弹簧刚 度可以取得大,使衔铁组件的固有频率高,而力马达的弹簧刚 度小,动圈组件的固有频率低。 4)减小工作气隙的长度可提高动圈式力马达和动铁式力矩马达的 灵敏度。但动圈式力马达受动圈尺寸的限制,而动铁式力矩马 达受静不稳定的限制。 5)在相同功率情况下,动圈式力马达比动铁式力矩马达体积大, 但动圈式力马达的造价低。
5.3 力反馈两级电液伺服阀
一、工作原理
无控制电流时,衔铁由弹簧管支承在上、下导磁体的中间位 置,挡板也处于两个喷嘴的中间位置,滑阀阀芯在反馈杆小球 的约束下处于中位,阀无液压输出。当有差动控制电流输入 时.在衔铁上产生逆时针方向的电磁力矩,使衔铁挡板组件绕 弹簧转动中心逆时针方向偏转,弹簧管和反馈杆产生变形,挡 板偏离中位。这时,喷嘴挡板阀右间隙减小而左间隙增大,引 起滑阀左腔控制压力增大,右腔控制压力减小,推动滑阀阀芯 左移。同时带动反馈杆端部小球左移,使反馈杆进一步变形。 当反馈杆和弹簧管变形产生的反力矩与电磁力矩相平衡时,衔 铁挡板组件便处于一个平衡位旨。在反馈杆端部左移进一步变 形时,使挡板的偏移减小,趋于中位。这使左腔控制压力又降 低,右腔控制压力增高,当阀芯两端的液压力与反馈杆变形对 阀芯产生的反作用力以及滑阎的液动力相平衡时,阀芯停止运 动,其位移与控制电流成比例。在负载压差—定时,阀的输出 流量也与控制电流成比例。所以这是一种流量控制伺服阀。
5.1 电液伺服阀的组成与分类
一、电液伺服阀的组成 电液伺服阀通常由力矩马达(或力马达)、液压放大器、 反馈机构(或平衡机构)三部分组成。 二、电液伺服阀的分类 按液压放大级数分为: 单级伺服阀 此类阀结构简单、价格低廉,但由于力矩 马达或力马达输出力矩或力小、定位刚度低,使阀的输 出流量有限,对负裁动态变化敏感,阀的稳定性在很大 程度上取决于负载动态,容易产生不稳定状态。只适用 于低压、小流量和负载动态变化不大的场合。 两级伺服阀 此类阀克服了单级伺服阀缺点,是最常用 的型式。
3)按极化磁场产生的方式可分为:非激磁式、固定电 流激磁和永磁式三种。 2、对力矩马达的要求 作为阀的驱动装置,对它提出以下要求; 1)能够产生足够的输出力和行程,问时体积小、重 量轻。 2)动态性能好、响应速度快。 3)直线件好、死区小、灵敏度高和磁滞小。 4)在某些使用情况下,还要求它抗振、抗冲击、不 受环境温度和压力等影响。 二、永磁力矩马达
二、基本方程与方框图
力矩马达的运动方程包括基本电压方程,衔铁和挡板 组件的运动方程,挡板位移于转角之间的关系,喷嘴 挡板至滑阀的传递函数,阀控液压缸的传递函数,以 及作用在挡板上的压力反馈方程,根据这些方程可以 画出电液伺服阀的方框图。
三Байду номын сангаас力反馈伺服阀的传递函数
给出的传递函数是一个惯性加振荡的环节,重点介绍 近似的传递函数:在大多数电液伺服系统中,伺服阀 的动态响应往往高于动力元件的动态响应。为了简化 系统的动态持性分析与设计,伺服阀的传递函数可以 进一步简化,一般可用二阶振荡环节表示。如果伺服 阀二阶环节的固有频率高于动力元件的固有频率,伺 服阀传递函数还可用一阶惯性环节表示,当伺服阀的 固有频率远大于动力元件的固有频率,伺服阀可看成 比例环节。