电动刀架PLC设计
数控车床电动刀架及其PLC控制设计
第2 期
李省委 : 数控车床 电动刀架及其 P L C 控制设计
9
3 . 1 P L C的 控制流 程 图
l = L 1
数控换刀有两种模式 , 一种是手动换刀 , 另一 种是通过 T 指令进行 自动换刀。手动换刀是指机 床调至手动状态 , 通过机床手动按键进行换刀选
择 。T指 令换 刀 是 直接 通 过 编程 刀号 作 为 目的刀 } 6 置 5正传输出控制
8
机电技术
2 0 1 4 年4 月
数控车床 电动刀架及其 P L C控 制设计
李省委
( 闽南理工学 院 , 福建 泉卅I 3 6 2 7 0 0 ) 摘 要: 阐述 了数控 车床 自动 回转刀架 的 自动换刀工作 的原 理与实现过程 以及 P L C 控 制设计 , 并就 电动刀架 的调试
福建省科技厅项 目( J B1 3 2 1 8 )
I / O信号进行逻辑 处理及计算 , 实现刀架的顺序控 制, 另外为了保证换刀能够正确进行 , 系统还要设
置一 些相应 的系统参 数来对换 刀过程 进行 调整 。
作者简介 : 李省委( 1 9 8 6 一) . 男. 助理实验师 , 研究方 向: 机械] -5正传输 出控翩
<
到 编 藉 程 劈 刀 具 字 了 蚕 吗 _ — — 一 一
是 刀 架 反 转 , 刀 架 夹 紧 监 控 生 效
H
)
图 5 工位检测到刀具 电机停止正转
夹紧监控结束 ,复位进全保持和反转信号
图 6 反 转 控 制
置6反转输 出控制
进行 了介绍 。实践证明 , 设计 的程序在实际应用 中灵活性强 、 可靠性高。
经济型数控车床电动刀架PLC控制电路设计

经济型数控车床电动刀架PLC控制电路设计近年来,数控技术在机械加工行业中得到了广泛的应用。
数控(Numerical Control)简称NC,是利用数字信息进行工控的一种技术。
在数控设备中,电动刀架是重要的组成部分之一,其用于自动更换刀具,提高机床的加工效率。
在本篇文章中,我将介绍一种经济型数控车床电动刀架PLC (Programmable Logic Controller,可编程逻辑控制器)控制电路的设计。
该设计采用的是简单且成本较低的电路结构,适用于小型工厂或个人车间的数控车床。
首先,我们来介绍电动刀架的原理。
电动刀架由电机、传动装置和刀架组成。
传动装置可以使刀架在机床的X、Z轴上进行移动,并且只有在传动装置工作时,电动刀架才能进行刀具的更换。
刀具的选择通常通过对刀片的转动角度进行控制,采用PLC进行控制可以实现刀具的自动选择。
PLC控制电路设计如下:1.电机控制电路为了控制电动刀架的移动,我们需要使用一个电机来驱动传动装置。
这里我们选择步进电机,因为步进电机具有高效、低功率、低噪音等优点。
电机控制电路可以使用L298N驱动芯片,该芯片具有良好的防抖动能力,能够实现步进电机的准确控制。
2.传感器控制电路传感器用于检测刀架的位置。
我们可以使用限位开关或光电开关作为传感器,当刀架到达预定的位置时,传感器将发送信号给PLC,PLC根据信号来控制电机的停止或移动。
在电路设计中,需要考虑传感器输出信号的电平转换和防抖动电路的设计。
3.PLC控制电路PLC控制电路是整个系统的关键部分。
我们可以选择适当的PLC型号,如三菱、台达或西门子等。
PLC具有良好的可靠性和强大的功能,能够实现复杂的逻辑控制。
在这个设计中,PLC负责接收传感器信号,并根据预设的程序控制电机的运动和刀具的选择。
4.电源电路电源电路主要为整个系统提供电能。
由于PLC和电机需要较高的电流,我们需要选择合适的电源输出电压和电流。
除了上述的四个主要电路,我们还需要考虑设备的保护电路和信号补偿电路的设计。
刀架PLC程序及有关参数设置
刀架PLC程序及有关参数设置
刀架的PLC程序
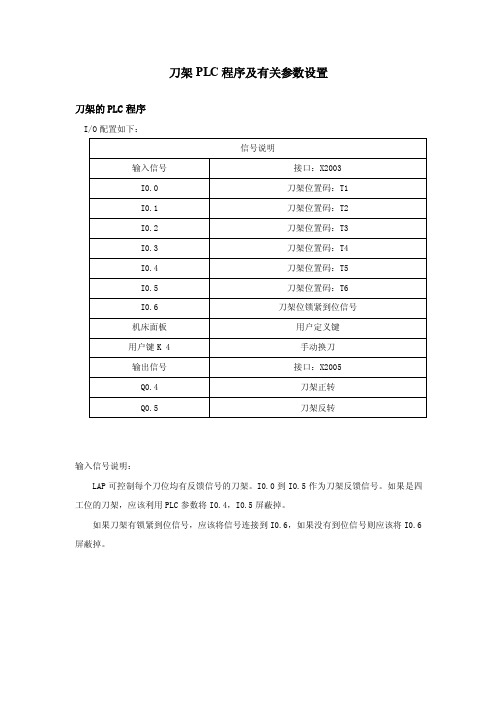
I/O配置如下:
输入信号说明:
LAP可控制每个刀位均有反馈信号的刀架。
I0.0到I0.5作为刀架反馈信号。
如果是四工位的刀架,应该利用PLC参数将I0.4,I0.5屏蔽掉。
如果刀架有锁紧到位信号,应该将信号连接到I0.6,如果没有到位信号则应该将I0.6屏蔽掉。
(1)西门子802S数控车床的PLC程序如下:
输出的初始化程序。
在子程序开始时,当前所有的数值都要初始化。
通过复位键退出紧急状态。
读入当前的被激活的刀号。
在如下的情况下不允许换刀。
读入当前刀位号。
在JOG模式下换刀控制。
在自动或手动输入模式下换刀。
换刀时间的控制。
(2)西门子802S数控车床刀架的控制方向程序如下:
计算出要运行的刀位号的值。
换刀后重新计算刀位号的值。
4.2 有关参数设置机床数据
MD14510[第0字]:刀架刀位数:
只允许输入4工位或6工位,其他数值均被认为刀架无效。
MD14510[第1字]:刀架卡紧时间:
以100ms为单位输入刀架的反转卡紧时间。
如果刀架允许,必须
给定该值。
输入信号:I0.0,I0.1,I0.2,I0.3,I0.4,I0.5刀位检测信号
I0.6锁紧到位检测信号
零件程序中的T码
机床控制面板上的手动换刀键
输出信号:刀架正转(Q0.4)
刀架反转(Q0.5)。
9(自动回转刀架设计-PLC2)

沈阳航空航天大学机电综合课程设计任务书机电工程学院机械电子工程专业班级:学号:姓名:一、课程设计课题:数控车床自动回转刀架机电系统设计二、课程设计时间:年月日——年月日三、课程设计技术说明和控制要求设计一台四工位的立式自动回转刀架,适用于C616或C6132经济型数控车床。
要求完成自动回转刀架的机械结构设计,绘制规范工程图。
实现自动回转刀架的换刀流程,采用PLC控制,设计控制刀架自动转位的控制电路,编写刀架的控制软件。
电机额定功率为100W,额定转速为1440r/min,换刀时要求刀架转动的速度为30r/min。
四、课程设计的主要内容1、分析设备的功能要求,设计系统方案;2、机械结构设计,绘制装配图1张(A0);3、电气系统设计:绘制电气接线图(A1);4、控制程序设计,调试;5、撰写课程设计说明书。
五、 课程设计时间安排六、主要参考资料[1] 尹志强等著.机电一体化系统设计课程设计指导书.机械工业出版社,2007 [2] 秦志强等. 数控机床的装配与调试. 北京:电子工业出版社,2009 [3] 于超等. 机床数控技术与编程. 北京:国防工业出版社,2010 [4] 胡汉才.单片机原理及其接口技术.北京:清华大学出版社,2004[5] 高海生,杨文焕.单片机应用技术大全.成都:西南交通大学出版社,1996指导教师_____________ __________年_______月_______日 学生签字_____________ __________年_______月_______日序号 时间(天) 内容安排备注 1 1 讲解设计目的、要求、方法,任务分工 2 2 制定设计方案、绘制草图 每人一份草图3 1 设计方案审核、修改4 3 机械结构设计、绘制机械结构图5 3.5 电气CAD 制图、控制程序设计6 2 控制系统调试分时进行7 2 任务验收,编写设计说明书 8 0.5 答辩总计15。
数控机床四方刀架plc控制
西京学院本科毕业设计(论文) 题目:数控车床电动刀架PLC控制的设计教学单位:机电工程系专业:机械设计制造及其自动化学号: 0811050502姓名:吴启龙指导教师:徐开良2012年5月摘要数控车床今后将向中高当发展,经济型数控刀架配套,采用电动刀架,预计近年来对数控刀架需求量将大大增加。
数控刀架的发展趋势是:随着数控车床的发展,数控刀架开始向快速换刀和伺服驱动方向发展。
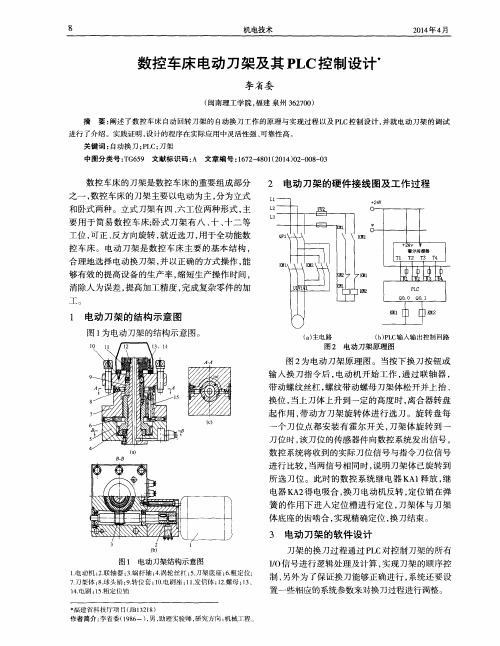
本部分主要对常州宏达公司生产的LD4B电动刀架四工位立式电动刀架的PLC车床控制设计,并对电动刀架的电路设计,从刀架的结构和工作原理深刻分析,着重研究了数控机床刀架的机械结构以及电气控制原理,PLC控制,霍尔元件的原理机应用。
回转刀架的换刀动作分为刀盘抬起、刀盘转位和刀架锁紧三个动作,刀盘转位则由普通三相异步电动机来驱动。
刀盘转位动作的实现经以下步骤:数控系统发出刀盘转位的命令→三相异步电动机启动→涡轮蜗杆转动→刀架主轴转动→实现刀盘转位。
关键词:经济型数控车床;车床刀架;PLC控制电动刀架AbstractNumerical control lathe, will in the future high when to development, economic l, in recent years on the nc tool is expected to demand will increase greatly. Nc tool is the development trend of: along with the development of the CNC lathe, CNC tool began to change cutters quickly and servo drive direction. The main part of changzhou HTC company produces the LD4B electric tool 4 Labour vertical electric tool PLC lathe control design, and the electric tool circuit design, tool from the structure and working principle of profound analysis, this paper studies the numerical control machine tool and mechanical structure of the electric control principle, PLC control, the principle of the hall element machine applications.Rotary tool for knife actions are divided into the knife dish up the, the knife dish inversion and tool carrier lock three movements, the knife dish inversion is by ordinary three-phase asynchronous motor to drive. The knife dish inversion of the following steps to achieve the action: the numerical control system knife dish out the command of the inversion three-phase asynchronous motor starting rotation axis rotation worm turbine enough to realize the knife dish inversion.Keywords: economic numerical control lathe, Lathe tool; PLC control electric tool1 绪论1.1课题的研究背景梳子程序控制机床一般简称为数控机床。
西门子802D系统数控机床电动刀架PLC控制
一、引言数控车床的自动换刀过程通常由PLC 控制回转刀架来实现,在实际使用过程中回转刀架有两种:电动回转刀架和液压回转刀架。
电动回转刀架因为结构简单、易于控制且经济性好等原因,广泛应用于经济型数控车床。
液压刀架结构较复杂、但刀具容量大、换刀速度快,且定位准确,所以广泛应用于高档数控车床[1]287-289。
电动回转刀架通常由底座、刀架体、驱动电机、蜗轮蜗杆、螺纹升降机构、端面齿牙盘和刀位检测装置等部件组成,刀具可通过刀架体上部的螺钉夹紧于刀架体上,刀架定位利用端面齿牙盘实现[2]231-232。
在数控车床上,电动刀架换刀控制通常涉及CNC 辅助功能T 指令控制与PLC 控制,所以换刀控制PLC 程序设计时主要考虑CNC 系统信号与PLC 信号处理。
以配置西门子802D 系统的数控车床为例,因为PLC 集成在数控系统上,所以编制换刀控制PLC 程序时,要先分析控制要求,弄清编程涉及的接口信号,然后可参照西门子系统换刀控制子程序编制出合适的换刀控制程序。
二、西门子802D 系统数控车床电动刀架换刀控制流程(一)电动刀架换刀控制过程电动刀架换刀的一般过程为:刀架抬起、刀架转位、刀架定位和刀架锁紧四步[2]231-232。
电动刀架换刀控制有两种,手动换刀与自动换刀:手动换刀指的是在手动JOG 操作方式有效时,按下换刀按键,刀架PLC Control of Electric Tool Holder for CNC Machine Tool of SIEMENS 802D SystemLei Nannan(Sanmenxia Polytechnic,Sanmenxia 472000,China )Abstract :The control process of switching tool for electric tool holder of SIEMENS 802D CNC lathe is analyzed,and the control subroutine of electric tool holder control and related control interface signal are systematically studied.Taking CK6140CNC lathe as an example,the PLC program of four station electric knife rest tool changing control is worked out.Key words :SIEMENS;CNC system;electric tool holder;tool change control;PLC program眼文章编号演1671-802X穴2018雪03-0005-06西门子802D 系统数控机床电动刀架PLC 控制雷楠南(三门峡职业技术学院,河南三门峡472000)摘要:分析了西门子802D 系统数控车床电动刀架的换刀控制过程,系统地研究了电动刀架换刀控制子程序、列出了相关控制接口信号。
全功能数控双伺服动力刀架的PLC程序研究
( h na gMahn ol( ru )C . Ld , h n ag10 4 ,C N) S e yn c ieT o G o p o , t. S e yn 1 12 H
ai w scm lt , hc e nst n t n l p ca poet f h l i - er ln xs a o pee w i b l g ai a sei r c o te1 Fv ya a . d h o o o l j h e t P
K e w o ds:Tu r t i me s8 2D l y r re ;S e n 0 s ;PLC Ax s;PL Pr g a i C o r m
Fcn i 能 郜 件 uiUs n t t n功 o
全 功 能 数 控双 伺 服动 力刀 架 的 P C程 序研 究 L
刘 洪 强 张 鹏 化 春 雷 徐 兆 成 杨 国 强
( 阳机 床 ( 团) 限 责任公 司 , 宁 沈 阳 10 4 ) 沈 集 有 辽 1 12 摘 要: 以数控 系统 8 2 l 平 台 。 0 D s为 阐述 了 y轴 作为 P C轴 的设 置步 骤及 P C控 制程 序 。 述 了 S W 伺 L L 描 F 服刀 架的 逻辑 转位 过程 。 制 了双伺 服动 力 刀架 的 P 编 LC程序 , 终 实现 了对 “ 一五 ” 最 十 国家 专项 “ 全 功能数 控 双伺 服动 力 刀架” P C程序 深 入研 究 。 的 L
伺 服动 力 刀架是 车 床及 车削 中心所 需 的核 心功 能 部 件 。现有 高速 数控 机 床 的伺 服 动力 刀架 多数 采用 国 外 S U E D P O TC等公 司 的产 品 。“ A T R、 U L MA I 十一 五 ”
数控车床自动回转刀架PLC控制系统设计
1 电动回转刀架工作过程
电动刀架一般有 四工位或 六工位 , 由电动机 、 械 机 换刀 机构 、 发讯盘 等组 成 , 当系统 发 出换 刀信 号 , 刀架 电机正转 , 通过 减速 机构 和 升降机 构将 上 刀体 上升 至
发生改变 , 统选 择也 会发 生 相应 的改 变 。也 可 以采 系
用单 键换 刀 , 一个 短 促 的按 键 可 以换 下 一 个 刀位 。T 指令 换刀是 直 接 通过 编 程 刀号 作 为 目的刀 位 进行 换
刀。刀架 电机顺 时针 旋 转 时为选 刀 过程 , 逆时针 旋转
2 控 制 系统 设 计
限于篇 幅 , 只给 出 自动换 刀部分梯形 图如 图 3 。 图 3是 自动换刀 控制的 P C梯形 图 , L 在梯形 图中 ,
刀架控 制 的主 电路 , 主要 是 通过 控制 刀架 电机 的正转 和 反转来控制 刀架 的正转 和 反转 ; ( ) 刀 架 控制 图 b是
用字节传送 指令将 当前 刀 位开 关 信号 1. 0 0一1. 0 3转 换成 当前刀号 存放 到 T , T选 通信 号 的作用 下 , 中 在
输入信号 进行检测 , 把刀 具各 有一 个霍 尔位 置检 测 每
维普资讯
维普资讯
机床 电器 20 . 0 83
计 算机 ・ L P C应用— —数控车床 自动 回转刀架 P C控制系统设计 L
数 控 车床 自动 回转 刀 架 P C控 制 系统 设 计 L
陈学 军 ( 台州职 业技 术学 院 ,100 380 )
摘要 : 在分析数控车床 自动 回转刀架工作过程的基础上 , 介绍 了 自动换刀控制 的 P C程序设计 。实践证 明 , L
毕业论文《四方刀架的plc控制设计》
四工位自动刀架电路,刀架电机采用三相交流380V供电,正转是驱动刀架正向旋转,各刀具按顺序依次经过加工位置,刀架电机反转时,刀架自动锁死,保证刀具能够承受切削力。
每把刀具各有一个霍尔位置检测开关。
换刀动作由T指令或手动换刀按纽启动,换刀过程如下:(a)刀架电机正转;(b)检测到所选刀位的有效信号,停止刀架电机,并延时(c) 延时结束后刀架电机反转锁死刀架,并延时(d) 延时结束后停止刀架电机,换刀完成。
关键词数控机床;电动刀架;自动换刀目录 (1)第1章机械结构 (3)1.1刀架总述 (3)1.2换刀的机械原理 (3)第2章电动刀架的电气控制 (4)2.1刀架拆卸顺序 (4)2.2工作原理 (5)2.3电动刀架的电气控制 (6)2.3.2 15T型 (7)第3章数控车床刀架PLC控制 (9)3.1过程分析 (9)3.2安全互锁 (9)3.3程序设计 (9)3.3.1 车床刀架用T指令换刀的C语言PLC处理程序 (9)3.4刀架控制逻辑 (12)3.4.1控制逻辑 (12)3.4.2信号地址、名称和意义 (12)3.4.2自动换刀系统 (13)第4章数控机床的开机调试 (16)4.1刀架不能启动 (16)4.1.1机械方面的原因 (16)4.1.2电器方面的原因 (17)4.2刀架连续运转、到位不停 (17)4.3刀架越位过冲或转不到位 (17)4.4刀架不能正常夹紧 (17)第5章故障现象分析 (19)5.1常见的故障 (19)5.2刀架使用的注意事项 (19)致谢 (25)参考文献 (26)第1章机械结构1.1刀架总述数控刀架安装在数控车床的滑板上。
它上面可以装夹多把刀具,在加工中实现自动换刀刀架的作用是装夹车刀,孔加工刀具及螺纹刀具并能准确迅速的选择刀具进行对工件的切削。
刀架滑板由纵向(Z轴)滑板和横向(X轴)滑板组成,纵向滑板安装在床身导轨上,可以沿床身纵向运动,横向滑板安装在纵向滑板上,能沿纵向滑板的导轨进行横向运动,刀架滑板的作用是安装在其上的刀架刀具在加工中实现纵向和横向的进给运动。
基于PLC的数控车床电动刀架实训装置开发
机床维修技术高技能人才 的培养品质 。
1 电动 刀 架 的 控 制 原 理 分 析
换 刀 控 制 的输入 信 号 ,主要 是 选 刀按 钮 发 出 的
输 主要包括 本实训装置基于配置华 中 H C 2 世纪星的数 刀具选择信号和刀架到位信号 。 出信号 , N 一1 目标刀号 ( 要选择的刀号 )刀架 的检测刀号( 、 刀架 当 控车床 , 该数控系统采用 内置式 P C 刀架 电动机的 L, 前的实际刀号 )刀架电机正反转控制信号等。 、 电气控制原理如图 1 所示 。 刀号的检测 , 是通过刀架 中的发信盘安装的霍尔 元件及磁钢来完成的。霍尔元件是相当于一个磁性开 关, 当靠近磁钢时 , 输出 0 V电压 , 当离开磁钢时 , 输出 2 V 电压 , 4 数控 系统 根据 T , ,3I 1 T ,4对应 的输 出 电 " 压, 便可知道刀号的位置, 其电气原理如图 2 所示。
图 1 刀 架 电 动 机 控 制 原 理 图
11 控 制原理 .
当数控 系统 发 出换 刀 指令 时 ,由 P C的 Y . L 0 6输 出刀 架 电动机正 转 的信 号 , 中 间继 电器 K 的线圈 使 A1 得电, 常开触 头 闭合 ; 接触器 K 的线 圈得 电 , M1 主触头 闭合 , 刀架 电动机开 始正转 。 同时 , 中间继 电器 K 常 A1 闭触 头断 开 ,接触 器 KM1的常闭辅助触 头也 断开 , 接
3—冀=ef ~ . {j 月 7 — g目 6 —£ ’ 5量= d 号 ' — 一 =f = — c ・ =: 1 j
" K 5
LD 1 . 02
O
M0 1 .
M I
_
I M
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1.1课题的目的及意义目前,我国机械制造业拥有相当数量的普通机床,其突出的矛盾是生产效率低、劳动强度大、加工精度低、适应性差,不能加工复杂的零件,为了节约资金,降低成本,对原有普通机床进行数控化改造,是提高普通机床数控化率,解决上述矛盾的一种有效途径。
数控车床的刀架是机床的重要组成部分。
刀架用于夹持切削用的刀具,因此其结构直接影响机床的切削性能和切削效率。
在一定程度上,刀架的结构和性能体现了机床的设计和制造技术水平。
对普通车床进行数控化改造,换刀装置的设计是一个必须解决的问题,在大多数普通车床的数控改造中,电动刀架控制系统的设计往往采用PLC提供控制信号,然后通过继电器和专门电路实现换刀控制,或者采用单片机和继电器实现换刀控制。
上述方案,要么控制电路复杂,要么成本提高。
本文介绍了以PLC为控制核心,以电动刀架为控制对象的经济型数控车床系统中电动刀架控制系统的软硬件设计与实现方法,设计的电动刀架控制系统电路简单、可靠性高,为车床系统改造中的自动换刀问题提供了一种有效的解决途径。
在设计过程中,会涉及多门专业课程的知识,通过这次课程设计,基本达到以下几点目的:1.巩固和深化已学的理论知识,掌握电动刀架PLC控制一般方法和步骤;2.熟悉并会用有关国家标准、部颁标准、设计手册和产品样本等技术资料;3.对所学理论知识的进一步巩固掌握;能综合运用所学知识解决相应的实际工程问题,达到学以致用;4.锻炼学生的实践操作能力,培养学生树立独立思考问题和处理问题的能力;5.培养学生的文献检索能力与科技文献写作能力。
1.2国内外发展及状况目前国内数控刀架以电动为主,分为立式和卧式两种。
立式刀架有四、六工位两种形式,主要用于简易数控车床;卧式刀架有八、十、十二等工位,可正、反方向旋转,就近选刀,用于全功能数控车床。
另外卧式刀架还有液动刀架和伺服驱动刀架。
电动刀架是数控车床重要的传统结构,合理地选配电动刀架,并正确实施控制,能够有效的提高劳动生产率,缩短生产准备时间,消除人为误差,提高加工精度与加工粘度的一致性等等。
另外,加工艺适应性和连续稳定的工作能力也明显提高:尤其是在加工几何形状较复杂的零件时,除了控制系统能提供相应的控制指令外,重要的一点是数控车床需配备易于控制的电动刀架,以便一次装夹所需的各种刀具,灵活方便地完成各种几何形状的加工。
当前数控车床的发展很快,特别是适合中国国情的经济型简易数控车床的迅猛发展,与之相适应的电动刀架的研究与生产也日趋活跃。
国内生产、研究电动刀架的厂家很多,据不完全统计,参加“1994年中国机床工具商品展览交易会”的生产厂家就有七家之多,各厂家所采用的结构与控制方式各异,因而数控车床数控系统选择、控制电动刀架是人们所面临的一个新课题数控刀架的市场分析: 随着数控车床的不断发展,数控车床今后将向中高档发展,中档采用普及型数控刀架配套,高档采用动力型刀架,兼有液压刀架、伺服刀架、立式刀架等品种,预计近年来对数控刀架需求量将大大增加。
数控刀架的高、中、低档产品市场数控刀架作为数控机床必需的功能部件,直接影响机床的性能和可靠性,是机床的故障高发点。
这就要求设计的刀架具有转位快,定位精度高,切向扭矩大的特点。
它的原理采用蜗杆传动,上下齿盘啮合,螺杆夹紧的工作原理。
1.3主要技术要求1.3.1车床刀架技术指标重复定位精度<<0.005m工作可靠性>30000次换刀时间90°(3.5s)、180°(4s)、270°(4.5s)1.3.2电动刀架结构及研究方向如图1-1为端齿盘式四刀回转刀架图1-1电动刀架外形图1.3.3电动刀架结构示意图如图1-2为电动刀架结构示意图图1-2电动刀架结构示意图1-电动机;2-联轴器;3-蜗杆轴;4-涡轮丝杠;5-刀架底座;6-粗定位7-刀架体;8-球头销;9-转位套;10-电刷座;11-发信体;12-螺母;13、14-电刷;15-粗定位销1.3.4课题研究目的本课题的主要目的是通过PLC控制,控制直流继电器,继电器再驱动交流接通三相交流电源使刀架电动机正转或反转从而控制电动刀架能够灵活换刀PLC控制车床的电动刀架,主要是对刀架的自动控制,在原由的普通车床刀架进行创造性的设计,使车床达到经济使用的状态。
随着电气技术的飞速发展,PLC控制车床电动,通过用户程序控制生产工艺过程,具有较高的稳定性和可靠性,较强的实时处理能力,使用简单维护方便。
程序的编制充分考虑操作指令和现场信号,整个操作变得比较简单,工作台的旋转、变档、调速,进给、快速移动控制,相互的联锁保护和显示等功能均有PLC完成。
因此,我们在对普通机床进行数控改造的过程中,应在考虑各种情况下,使普通机床的各项性能指标尽可能地与数控机床相接近。
本章小结初步了解了设计题目(电动刀架的PLC控制)及发展概况,设计背景,对刀架结构进行剖析及梳理工作原理,对整理设计思路安排设计时间有很好的辅助作用。
对一些参数的进行了解同时按准则要求来完成设计。
第二章电动刀架PLC控制整体方案2.1电动刀架工作过程电动刀架一般有四工位或六工位,由电动机、机械换刀机构、发讯盘等组成。
如图2-1当系统发出换刀信号,刀架电机正转,通过减速机构和升降机构将上刀体上升至一定位置,离合盘起作用,带动上刀体旋转到所选择刀位,发讯盘发出刀位到位信号,刀架电机反转,完成初定位后上刀体下降,齿牙盘啮合,完成精确定位,并通过升降机构锁紧刀架。
图2-1工作过程工作过程:(1)微机要刀:要刀信号PLC设备响应—电机正转—刀架上升—刀架旋转—旋转到霍尔元件发出信号—电机反转—刀架锁紧—电机过流—发出中断信号—应答—加工(2)手动要刀:手动按钮压下—电机正转—刀架上升一刀架旋转—到位霍尔元件发讯—电机反转一刀架下降锁紧—电机过流—发出中断信号—应答—加工[1]2.2电动刀架工作原理电动刀架原理图见附录1、PC接线图见附录2按下换刀键或输入换刀指令后,电机正转,通过联轴器,蜗杆带动蜗轮,螺纹带动螺母刀架体松开并上抬,转位、找刀刀架体的上方有一发信盘,盘中每一刀位都安装一霍尔开关刀架体旋转到一刀位时,该刀位的传感器件向数控系统发出信号,数控系统将收到的实际刀位信号与指令刀位信号进行比较,当两信号相同时,说明刀架体已旋转到所选刀位,数控系统控制继电器KA1释放,继电器KA2得电吸合,换刀电动机反转,粗定位销在弹簧的作用下进入粗定位盘的凹槽中进行粗定位,由于粗定位销的限制刀架体不能反转只能在该位置垂直落下,刀架体和刀架体底座的端面齿啮合,实现精确定位,电动机做适当延时,继续反转,当两端面齿增加到一定的夹紧力。
刀架体被锁紧时,电动机停止转动,换刀结束。
电动刀架各时序的切换及间隔是系统控制的关键,反向锁紧所用时间取决于电动刀架生产厂家有推荐指标,过长会引起电机发热甚至烧毁。
为保证电动刀架安全运动,在电动刀架交流380V进线处加装快速熔断器和热继电器[2]系统电气控制总框图如图2-2所示图2-2电气控制总框图2.3刀架动作数控系统调刀代码开始执行时,或行动调刀时,首先输出刀架正转信号,使刀架旋转,当接收到指定的刀具的到位信号后,关闭刀架正转信号,延时50ms 时间后,刀架开始反转而进行锁紧,并开始检查锁紧信号,延时60s,当接收到该信号后,关闭刀架反转信号,延迟时间,并对电机制动。
换刀结束。
程序转入下一程序段继续执行。
如执行的刀号与现在的刀号(自动记录)一致时,则换刀指令立刻结束,并转入下一程序段执行。
根据上述描述的换刀动作过程,做了如下动作流程图2-3所示图2-3动作流程图本章小结:本章主要介绍电气控制,电动刀架工作过程,电动刀架工作原理以及电动刀架动作。
第三章电动刀架控制系统硬件3.1PLC简介3.1.1PLC概念可编程序控制器 (PLC)是在继电器控制和计算机控制基础上发展起来的新兴工业装置,是工业自动化的主导产品。
自1996年第一台可编程序控制器问世以来,经过30多年的发展,现在可编程序控制器已经成为最重要、最可靠、应用场合最广泛的工业控制微型计算机。
在可编程序控制器中,充分应用了大规模集成电路技术、微电子技术及通信技术,迅速地从早期的逻辑控制发展进入到位置控制、伺服控制、过程控制等领域。
用可编程序控制器已经可以构成包括逻辑控制、数据采集与控制、图形工作站等的综合控制系统。
可编程序控制器作为计算机型的控制装置,已广泛应用于机械制造、冶金、化工、轻工、能源、交通等各部门。
无论是单机或多机控制、生产自动线控制、生产过程自动控制及对老控制系统进行技术改造等方面,都大量采用了PLC。
3.1.2PLC在数控系统中的类型数控机床所用PLC可分为两种类型。
一种类型是PLC独立于CNC装置,有完备的硬件和软件功能,能够独立完成规定的控制任务,以满足数控机床或其它顺序控制领域要求的“通用型”PLC:另一种类型是专为实现数控机床顺序控制而设计、制造的“内装型”PLC,它从属于CNC装置,与CNC共用计算机硬件资源。
PLC与CNC之间的信号传送在计算机内部即可实现。
“内装型”PLC除了具有结构紧凑、可靠性好、操作方便等优点外,与“通用型”PLC相比,它在性能、价格方面也具有明显的优势[3]。
3.2三相异步电动机的选取电动刀架的电器控制部分强电和弱电两部分,强电部分有三相电源驱动三相交流异步电动机正、反向旋转,从而实现电动刀架的松开、转为、锁紧等动作。
许多机械加工需要微量进给。
要实现微量进给,步进电机、直流伺服交流伺服电机都可作为驱动元件。
对于后两者,必须使用精密的传感器并构成闭环系统,才能实现微量进给。
在开环系统中,广泛采用步进电机作为执行单元。
这是因为步进电机具有以下优点[7]:1.直接采用数字量进行控制;2.转动惯量小,启动、停止方便;3.成本低;4.无误差积累;5.定位准确;6.低频率特性比较好:7.调速范围较宽;根据技术参数:需要电动机功率180W,电机转速1400转/分查手册《机械产品目录》选出三相异步电动机型号:Y801-4(额定功率0.55KW 同步转速1500r/min)3.3检测件设计电动刀架的电气控制弱电部分主要由位置传感器—发信盘构成。
发信盘采用霍尔传感器发信。
根据数控系统的不同。
电动刀架发信盘是固定在刀架内部中心固定轴上由尼龙材料作为封装的圆盘部件。
发信盘的内部根据刀架工位数设有四个或六个霍尔元件,并与固定在刀架上的磁钢共同作用来检测刀具的位置3.3.1发信盘内部结构和工作原理四工位发信盘共有六个接线端子,两个端子为直流电源端,其余四个端子按顺序分别接四个刀位所对应的霍尔元件的控制端,根据霍尔传感器的输出信号来识别和感知刀具的位置状态。
当程序指令刀架更换2号刀具时,刀架电机驱动刀架旋转;当在刀架上的磁钢到达发信盘的2号位置时,霍尔元件就会发出开关信号给CNC系统刀架位置控制接口,确定刀具已到达确定位置并锁住刀架。