LFMCW雷达系统的设计与仿真
LFMCW雷达系统的设计与仿真
LFMCW雷达系统的设计与仿真LFMCW雷达系统(Linear Frequency Modulated Continuous Wave Radar System)是一种常用的无源传感系统,广泛应用于航空、导航、军事、安全等领域。
本文主要介绍LFMCW雷达系统的设计原理以及相关仿真方法。
首先,LFMCW雷达系统由发射机、天线、接收机以及信号处理部分组成。
发射机产生线性调频信号,通过天线发送到目标上,目标反射回波信号经过天线接收到接收机。
接收机对接收到的信号进行信号处理,并通过频率差计算目标距离、速度以及方位等信息。
在LFMCW雷达系统的设计中,需要关注以下几个方面:首先是天线设计。
天线是LFMCW雷达系统的关键部分,它负责发射出去的信号和接收回来的信号之间的耦合。
天线的频率响应、辐射方向图以及工作波段等特性需要和系统的参数要求相匹配。
然后是线性调频信号设计。
线性调频信号是LFMCW雷达系统中用于发送的信号,其频率随时间线性变化。
通过合理选择调频带宽和调频时间,可以实现对目标距离和速度的测量。
接着是接收机设计。
接收机需要对接收到的回波信号进行放大、滤波以及混频等处理。
在设计接收机时,需要考虑抗干扰性能、低噪声性能以及动态范围等指标。
最后是信号处理算法设计。
LFMCW雷达系统的核心是通过分析接收到的回波信号,提取出目标的距离、速度以及方位等信息。
常用的信号处理算法包括FFT算法、相关函数算法、高阶相关算法等。
在LFMCW雷达系统的仿真中,可以使用雷达仿真软件进行相关参数的模拟和验证。
首先,可以通过仿真软件设计合适的线性调频信号,并模拟其在目标上的反射情况。
然后,通过仿真软件设计合适的接收机和信号处理算法,对接收到的回波信号进行处理,并提取出目标的距离、速度以及方位等信息。
最后,可以通过与实际系统的对比,验证LFMCW雷达系统的设计和仿真结果的准确性。
综上所述,LFMCW雷达系统的设计与仿真需要对天线、线性调频信号、接收机以及信号处理算法进行设计和优化。
雷达系统设计与模拟

雷达系统设计与模拟雷达系统是一种利用电磁波来侦测物体并获得其位置、速度、大小和形状等信息的技术。
它在国防、交通、气象、地质勘探等领域有着广泛的应用。
为了更好地发挥雷达系统的作用,需要对其进行设计和模拟。
一、设计雷达系统的基本原理和步骤设计雷达系统需要首先了解其基本原理,即雷达利用电磁波与物体相互作用后,记录反射回波的时间、频率、强度等信息,从而获得物体的位置和速度等参数。
在此基础上,雷达系统的设计步骤如下:1.确定应用领域和任务需求:不同的领域和任务对雷达的性能和参数有不同的需求。
比如,军用雷达需要具有抗干扰能力和隐身侦测能力;民用雷达需要具有高精度和高灵敏度等特点。
2.确定设计参数:根据任务需求,确定雷达系统的频率、功率、天线、接收机等参数。
3.进行模拟仿真:利用仿真软件建立雷达系统模型,模拟雷达信号的传播和物体的反射。
通过仿真分析,优化雷达系统的性能和参数。
4.设计实验验证:对设计完成的雷达系统进行实验验证,验证其性能和参数是否符合预期。
二、雷达系统模拟的方法和技术雷达系统的模拟是指通过计算机软件模拟雷达信号的传播和反射等过程,从而预测雷达的性能和参数,并对其进行优化。
常用的雷达系统模拟方法和技术包括:1.有限差分时间域(FDTD)方法:FDTD方法是一种数值求解电磁场方程的方法,可以用于模拟雷达信号的传播和反射等过程。
它具有计算精度高、能耗低等优点。
2.物理光学(PO)方法:PO方法是一种基于物理光学理论的模拟方法,将电磁波视为光线,通过反射和折射等过程来预测雷达信号的传播和反射。
它具有计算速度快、适用于大尺寸目标等优点。
3.射线追踪(RT)方法:RT方法是一种基于几何光学理论的模拟方法,将电磁波视为射线,通过反射和折射等过程来预测雷达信号的传播和反射。
它具有计算快速、适用于多目标同时反射等优点。
三、雷达信号处理的方法和技术除了设计和模拟雷达系统外,还需要对雷达信号进行处理,以获得目标的位置、速度、大小和形状等信息。
LFMCW雷达中频接收机的设计与实现

中 图分 类 号 :T 5 . N9 75
文 献 标 识 码 :A
文 章 编 号 :1 7 — 2 6 2 1 )7 01 7 0 6 4 6 3 (0 10 — 4 — 3
De i n a m plm e f LFM CW a a F e ev r sg nd i e nto r d rI r c ie
te fe e y o a g tsg a ,whc o l r vde oi i ldaa frr d ri gng h rqu nc ftr e in l ih c ud p o i rgna t o a a ma i . Ke wo ds:LFMCW a r F sg lr c ie y r rda ;I ina e ev r;F PGA ;PCI
线 性 调 频 连 续 波 fF W) 达 具 有 体 积 小 、 量 轻 、 L MC 雷 重 结 构 简 单 、 辨 力 高 和无 距 离 盲 区 等 优 点 , 相 关 技 术 进 步 和 分 受
需 求的促 进 .近十 多年 来线 性 调频 连续 波雷 达逐 渐应 用 于 近距
离 高分辨 率多 目标 探测 与成 像 。本 文通 过对 一种 线性 调 频连 续
rc i i g rc s i g a d so a e o F s n l fL MC a a . h o g h e t h e e v rc n a c rt l a u e o t e e vn ,p o e s n tr g fI i a F n g o W r d r T r u h t e t s ,t e r c ie a c u aey me s r u
本 文 中 中 频 信 号 接 收 机 所 针 对 的 一 种 线 性 调 频 连 续 波
LFMCW雷达信号处理软件设计的开题报告
LFMCW雷达信号处理软件设计的开题报告开题报告:LFMCW雷达信号处理软件设计一、研究背景LFMCW(Linear Frequency-Modulated Continuous Wave)雷达是一种采用频率调制的连续波雷达,具有测距精度高、测速精度高、较好的抗干扰能力等优点,在多个领域有广泛的应用。
随着LFMCW雷达应用领域和使用场景的不断扩大,对其信号处理算法和软件的要求也越来越高。
本次设计旨在针对LFMCW雷达信号处理软件设计,以提高雷达信号处理效率和准确度,为LFMCW雷达应用提供支持。
二、研究内容(一)LFMCW雷达信号模型建立根据LFMCW雷达工作原理构建信号模型,对不同信号参数进行模拟和验证。
调节参数对不同的信号接收效果进行分析,为信号处理提供测试基础。
(二)LFMCW雷达信号数据采集与预处理通过雷达硬件数据采集进行信号采集,并对信号进行预处理,包括去噪、滤波、解调等。
提高信号的准确性和稳定性,为后续信号处理提供高质量的数据基础。
(三)LFMCW雷达信号处理算法研究与优化采用MATLAB等工具对LFMCW雷达信号进行处理,对现有的信号处理算法进行评估和优化,以提高信号处理效率和准确度。
(四)LFMCW雷达信号处理软件开发根据信号处理算法设计和优化结果,开发LFMCW雷达信号处理软件。
实现信号处理算法的自动化执行和结果展示,提高LFMCW雷达信号处理效率和可靠性。
设计用户友好的界面,方便使用者进行数据采集、信号处理及结果展示。
(五)系统测试与界面优化对开发完成的LFMCW雷达信号处理软件进行系统性能测试,发掘潜在问题和改进的空间,不断优化软件的功能及用户体验,最终达到提高软件性能的目的。
三、研究意义和社会价值(一)提高雷达信号处理效率和准确度;(二)支持LFMCW雷达应用领域的发展和应用场景的扩展;(三)为相关领域的工程师、科研人员和决策者提供技术支持和决策依据。
四、研究方法1、文献梳理。
车载LFMCW雷达探测系统分析与设计

范 围为 02 5 -. V,输 出阻抗 为 10 O n。 如图 1 示为雷达传感器在没有 目标反射 回波情况下 , 所 咖鲫伽猢 啪锄伽瑚。 H 示波器观察输 出 中频 差拍 信号 ,从 示 波器信 号 中可 以看 出
机混频器 的非理想 隔离 所造 成 的结 果 ,因此 ,在实 际系 统
度多普勒公式 一a g 计 算 目标 的速度 引起 的 D pl /v, op r e
频率最大为 9 6 .KHz 。 目标的距离引起 的频率 差与调 频斜率 和最远 测量距 离 有关 ,代入公式
一
设计 中,为 了减 小 这种 干 扰 ,在 进入 信 号 处理 电 路之 前 , 需要进行滤波预处 理 ,抑制 三角波中频交调干扰 。
雷达 接收 回波信号 与本振 信号 进行 正交 混频 ,输 出 I 、 Q两路 中频信号 ,雷达前 端集 成运 放 ,混频 后经过 运放 进
行 3d 0 B放大后 输 出带 宽为 5 —5KHz的差 拍信 号 ,电压 01 0
可知 ,信号强度在 5m 以外的迅速衰减 ,因此 ,中频信 号输 0 出端至少需要 3 d O B的增益放大 ,并且增加 A C模块才 能满 G 足A D芯片的需求达到防撞雷达所需 10 5m的探测距离 。 L MC 连续波 雷达 处 理 的是 目标 回波 的 差拍 信 号 , F W
系统 的硬件 实现方案 ,实验结果表明该检 测 系统设 计可靠,各部分参数达到实际要 求。
关 键 词 :线 性 调 频 连 续波 ;数 字 信 号 处 理 ;现 场 可 编程 门 阵列 ;防 撞 雷达 ;恒虚 警 率检 测
中图法分类号 : Ng l 文献标识号 : T l A 文章编号 :10 —0 4 (0 2 10 2—6 0 07 2 2 1 )0 —160
线性调频(LFM)脉冲压缩雷达仿真
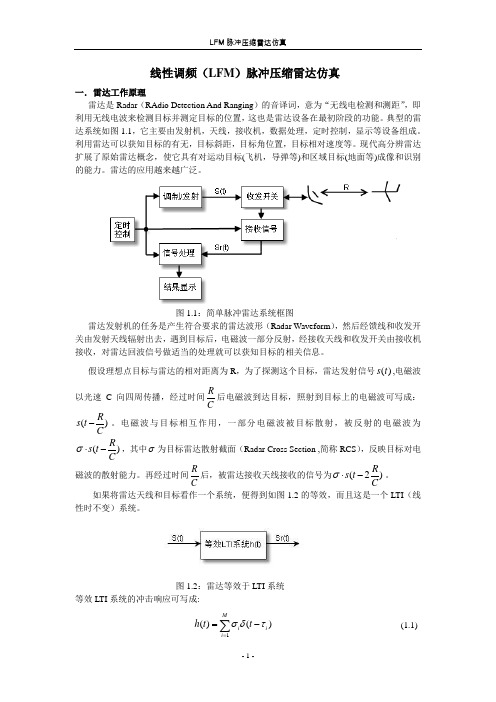
线性调频(LFM )脉冲压缩雷达仿真一. 雷达工作原理雷达是Radar (RAdio Detection And Ranging )的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
典型的雷达系统如图1.1,它主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。
利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。
现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。
雷达的应用越来越广泛。
图1.1:简单脉冲雷达系统框图雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform ),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。
假设理想点目标与雷达的相对距离为R ,为了探测这个目标,雷达发射信号()s t ,电磁波以光速C 向四周传播,经过时间RC后电磁波到达目标,照射到目标上的电磁波可写成:()Rs t C -。
电磁波与目标相互作用,一部分电磁波被目标散射,被反射的电磁波为()Rs t Cσ⋅-,其中σ为目标雷达散射截面(Radar Cross Section ,简称RCS ),反映目标对电磁波的散射能力。
再经过时间R C 后,被雷达接收天线接收的信号为(2)Rs t C σ⋅-。
如果将雷达天线和目标看作一个系统,便得到如图1.2的等效,而且这是一个LTI (线性时不变)系统。
图1.2:雷达等效于LTI 系统等效LTI 系统的冲击响应可写成: 1()()Miii h t t σδτ==-∑ (1.1)M 表示目标的个数,i σ为目标散射特性,i τ是光速在雷达与目标之间往返一次的时间:2ii R cτ=(1.2) 式中,i R 为第i 个目标与雷达的相对距离。
雷达探测技术的建模与仿真
雷达探测技术的建模与仿真雷达探测是一种通过发射电磁波,利用物体对电磁波的反射信号来探测物体位置、速度、形状和性质的技术。
在军事、民用领域广泛应用,如导航、遥感、气象、交通等。
随着科技的快速发展,雷达探测技术也逐渐成熟。
在雷达探测技术的发展中,建模与仿真是不可或缺的环节。
建模与仿真可以模拟出雷达探测所需要的各类信号,探测效果,不同物体的反射情况,帮助设计和优化雷达系统。
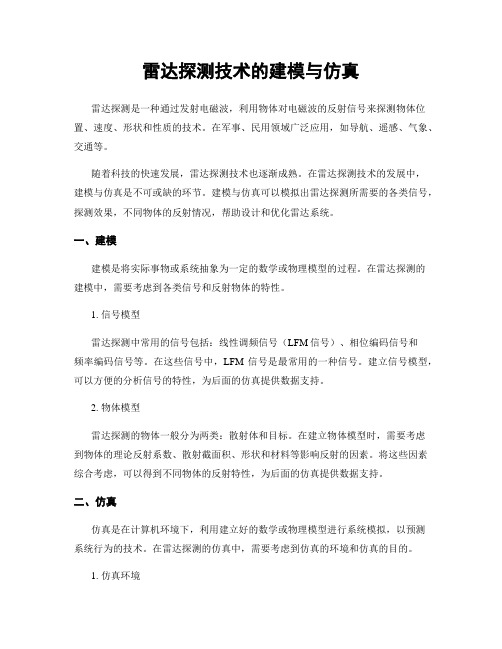
一、建模建模是将实际事物或系统抽象为一定的数学或物理模型的过程。
在雷达探测的建模中,需要考虑到各类信号和反射物体的特性。
1. 信号模型雷达探测中常用的信号包括:线性调频信号(LFM信号)、相位编码信号和频率编码信号等。
在这些信号中,LFM信号是最常用的一种信号。
建立信号模型,可以方便的分析信号的特性,为后面的仿真提供数据支持。
2. 物体模型雷达探测的物体一般分为两类:散射体和目标。
在建立物体模型时,需要考虑到物体的理论反射系数、散射截面积、形状和材料等影响反射的因素。
将这些因素综合考虑,可以得到不同物体的反射特性,为后面的仿真提供数据支持。
二、仿真仿真是在计算机环境下,利用建立好的数学或物理模型进行系统模拟,以预测系统行为的技术。
在雷达探测的仿真中,需要考虑到仿真的环境和仿真的目的。
1. 仿真环境雷达探测的仿真环境一般分为两类:地面仿真和空中仿真。
地面仿真一般是在计算机软件中构建3D模拟环境,利用不同物体的局部坐标和相对位置,计算出雷达探测的反射特性,模拟出雷达扫描过程。
空中仿真则需要模拟天气、风速、飞行高度、飞行速度等因素,以获得更真实的仿真结果。
2. 仿真目的雷达探测的仿真目的一般分为两类:性能评估和仿真验证。
性能评估主要是根据系统设计指标,比如最大探测距离、空中控制指挥系统驱动优化后雷达跟踪过程的性能、远程干扰抗性等,从理论上预估雷达系统的性能。
仿真验证则是通过模拟真实环境,下小巴高平原、海面等相应地形的不同天气环境,模拟部署后的实际应用结果,验证所设计的雷达方案在实际应用中的可行性。
LFM雷达系统设计与实现实验指导书(第一版sim2)
2
exp( jt0 )
经过傅立叶反变换后,则得到脉冲压缩输出信号 so (t ) 为
so (t ) A D sin B t t0
B (t t0 )
由上式可知,LFM 脉冲经过脉冲压缩以后输出的信号为 sin x x 函数,与压 缩前的脉宽 T 相比,脉冲宽度压缩了 D 倍。 2、DUC 和 DDC 窄带信号的数学表达式常写为: (通信和雷达)
·实验原理:
通过脉冲压缩可以有效的提高 S/N,以提高信号的检测能力; 通过恒虚警处理,在回波发生变化时(慢变化噪声或快变化杂波)自动的更 新门限,保持虚警概率不变,防止后端数据处理饱和。 1、LFM 脉冲信号和脉冲压缩处理 脉冲雷达是通过测量目标回波延迟时间来测量距离的, 距离分辨力直接由脉 冲带宽确定。窄脉冲具有大带宽和窄时宽,可以得到高距离分辨力,但是,采用 窄脉冲实现远作用距离需要有高峰值功率,在高频时,由于波导尺寸小,会对峰 值功率有限制,以避免传输线被高电压击穿,该功率限制决定了窄脉冲雷达有限 的作用距离。 现代雷达采用兼具大时宽和大带宽的信号来保证作用距离和距离分 辨力,大时宽脉冲增加了雷达发射能量,实现远作用距离,另一方面,宽脉冲信 号通过脉冲压缩滤波器后变换成窄脉冲来获得高距离分辨力。 进行脉冲压缩时的 LFM 脉冲信号为基带信号,其时域形式可表示为
时带积 D BT 1 时,LFM 脉冲信号的频域形式可近似表示为
2 exp j[2 2 f 2 / ] A Si ( f ) 4 0 B B f 2 2 其他
脉冲压缩滤波器实质上就是匹配滤波器, 匹配滤波器是以输出最大信噪比为 准则设计出来的最佳线性滤波器。 假设系统输入为 x(t ) si (t ) ni (t ) , 噪声 ni (t ) 为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LFMCW雷达系统的设计与仿真作者:杨宜禥李小兵来源:《信息技术时代·中旬刊》2019年第01期摘要:阐述了LFMCW雷达的基本理论;从波形选择、调频带宽选择、调频周期选择和恒虚警检测参数选择等方面详细介绍了LFMCW雷达系统的设计,并对设计的系统进行了仿真,仿真结果验证了设计要求。
关键词:LFMCW雷达系统;恒虚警检测;仿真 1.概述本文主要介绍LFMCW雷达系统设计与仿真。
首先,介绍LFMCW雷达信号处理算法的基本理论,主要从理论的角度解释常用的测距、测速、测角算法以及恒虚警检测算法。
然后,详细地阐述了LFMCW雷达系统的设计过程,研究了波形选择、波形参数以及恒虚警检测参数对LFMCW雷达系统性能的影响。
最后,通过MATLAB对LFMCW雷达系统进行仿真,以验证雷达系统设计的正确性。
2.LFMCW雷达的基本理论 2.1 测距测速算法锯齿波LFMCW发射信号的包络不随时间变化,在每个时间周期内线性变化,故其信号特征为锯齿波,如图 2-1 所示,设LFMCW发射信号的载频为f0,调频带宽为B,调频周期为TF。
其中,TR=2R/c,表示雷达发射信号经过距离R的回波延时,其中R表示点目标与雷达之间的距离,c则在式中表示电磁波传播的速度,其值为光速,通常来说,TF远大于tR。
当目标处于静止状态时,由于不存在多普勒效应,故LFMCW雷达的发射信号与接收信号之间的频率之差是一个常数fΔ,且与雷达和目标之间的距离呈现正向关系,其相关关系如式(2-1)所示。
式(2-1)中各个参数的物理含义同前所述。
以上对于频差fΔ虽然是在静止目标的基础上进行分析的,但是经过分析可知,发射信号与接收信号之间的频率之差fΔ同时包含着目标的距离信息与频率信息,只要通过测量频差fΔ,就可以得到距离等目标参量。
现实情况下,被探测目标与雷达之间往往存在着相对运动,此时雷达和目标之间存在着相对径向速度,故存在多普勒效应,差拍信号的频率值fΔ一直处于变化之中。
当目标与雷达之间的距离不断改变时,其变化的快慢会在多普勒频率中得以体现。
当背景噪声、杂波干扰与目标同时存在于雷达的同一空间分辨单元内时,雷达可利用它们彼此不甚相同的多普勒频率作为分辨因素,摒除干扰,从而专注于对目标的追踪。
因此在变化的频差中存在着目标的距离和速度等有用信息。
在工程实现中常用的锯齿波调制LFMCW信号处理方法是对差拍信号按重复周期采样,设每个周期采样N点,并且连续采集M个重复周期,将每个重复周期内的N点采样数据进行一次N点FFT(距离维FFT),即可将距离维上不同的距离单元区分开;再对距离维FFT结果中的属于同一距离单元的M点采样数据进行一次M点FFT(速度维FFT),即可区分同一距离单元内不同多普勒单元,其过程如图2-3所示。
2.2 测角算法 LFMCW雷达的相位法测角是利用多个天线接收的回波差拍信号之间的相位差进行测角。
根据图2-4,我们可以展开分析,设在θ方向有远区目标,电磁波到达接收点的目标后被反射,其之后的传播可被视为平面波。
由于两天线并不重合,导致它们接收到的信号存在波程差ΔR,进而产生相应的相位差φ,由图2-4可知:式(2-2)中,λ为雷达波长。
通过测量相位差φ即可反向推导出目标方向θ。
3.LFMCW雷达系统的设计本文设计的LFMCW雷达系统相关指标如下:载波频率在24GHz频段,测距精度ΔR≤0.6m,测速精度Δv≤0.4m/s,测角精度Δθ≤0.3o,最大可测距离Rmax≥50m,最大可检测目标数≥16。
3.1 波形选择在LFMCW雷达系统设计时,常用到锯齿波调制和三角波调制这两种线性调频方式。
选用任一方法调制的LFMCW雷达回波信号均包含着距离和速度信息。
不同点在于后续信号处理算法。
基于锯齿波调制的FMCW雷达对目标参数的提取是通过二维快速傅里叶变换来实现的,即将经过AD采集得到的数字信号按照距离维和速度维来存储,然后进行二维傅里叶变换,从而得到目标的距离差频和多普勒频移。
基于三角波调制的FMCW雷达,其信号处理算法比较多,主要是基于频域配对思想的多目标分辨算法,即基于同一目标在上下扫频段具有相同的频谱的特点实现目标的检测,但是此种方法的缺点是同一目标的频谱不可能完全相同甚至相差很大,或者不同目标的回波信号的频谱相类似,因此无法对它们进行准确地配对。
其他的调制波形主要是在锯齿波调制和三角波调制的基础之上进行的改变,在此不再赘述。
与基于三角波或其它波形调制的LFMCW雷达系统相比,基于锯齿波调制的LFMCW雷达系统在工程上易实现,通过对回波信号进行二维傅里叶变换可以很容易地从差拍信号中提取出距离-多普勒信息,然后通过求取两路接收信号中属于同一距离、速度单元的目标的相位干涉,即可得到距离,速度和角度信息。
在探测目标的性能上,只要频谱分析的精度足够高,就可以得到足够高的目标参数分辨率。
故本课题采用锯齿波调制方案。
3.2 调频带宽选择选择合理的雷达系统参数对提高LFMCW雷达系统检测性能有着重要的意义。
系统参数的选择既要满足足够高的距离、速度分辨率,同时也要考虑在工程实现时对硬件资源的开销。
以下将结合基本理论和MATLAB仿真选择LFMCW雷达系统工程实现的最佳参数。
调频带宽的选择主要考虑距离分辨率、测距范围和工程实现过程中的计算量等因素。
衡量LFMCW雷达系统性能的一个重要指标是距离分辨率。
距离分辨率可以定义为区分两个或多个方位相同但是距离不同的目标的能力。
调频带宽与距离分辨率之间的关系展现在式(3-1)中。
其中,ΔR为距离分辨率;c为光速;B为调频带宽。
式(2-35)表明调频带宽B越大,则距离分辨率ΔR越低。
虽然调频带宽B越大,距离分辨率ΔR越高,然而并不能一味追求高距离分辨率而设置很大的调频带宽,因为调频带宽的选择还需要考虑作用距离和工程实现时的计算量。
调频带宽与零中频差拍信号的最大频率之间的关系如式(3-2)所示。
其中,fbmax是最大差频;τmax 是最大可测距离所对应的回波延迟时间;k则代表的是调频斜率。
可见最大差频fbmax与调频带宽B成正比。
得到目标回波零中频差拍信号之后,进行AD采样,采样率fs需要最少高出信号中最高频率fbmax 的一倍,其关系式为式(3-3):由上述公式可得在最大可测距离不变的情况下,增大调频带宽B会间接导致采样率fs增大。
信号处理的过程是在频域进行的,若想得到足够高的距离分辨率,就需要FFT运算时频谱分析的精度足够高。
提高频谱分析精度最普遍的方法就是延长观察时间,增加FFT的点数N。
故若要求同样的谱分析精度,当采样率fs变大,将直接导致FFT点数N变大。
FFT的复数乘法计算量H与点数N之间的定量关系如公式(3-4)所示。
可见当N增大,复数乘法计算量近似线性增加。
综上所述,增大调频带宽B,将间接导致工程实现中的计算量成倍增加,此时就会出現硬件资源缺乏或信号处理算法实时性很差的情况。
基于上述工程实现时对硬件资源开销的考虑,令AD最高采样率为fs,则雷达最大可测距离Rmax 与调频带宽B之间关系如式(3-5)所示:由上式可知当调频带宽B变大,所对应的最大可测距离Rmax就会减小。
考虑到距离分辨率ΔR、最大可测距离Rmax与调频带宽B的关系,结合工程实现硬件平台,若要满足ΔR≤0 .6 m 、Rmax≥50m,调频带宽可选B=250MHz。
3.3 调频周期选择调频周期的选择主要考虑雷达系统的速度分辨率,同时为了消除雷达测距时的非单值性问题,调频周期TF应远远大于最大可测距离Rmax所对应的回波延迟,如式(3-6)所示。
当T>>2Rmaxc时,差拍信号的频率与距离成正比。
对采样数据进行加窗频谱分析以尽量减小由于回波延迟带来的不规则区间,从而减小差拍信号频谱中的许多谐波分量和离散频谱,使差拍信号在任一距离单元内均为单一差拍信号,因此需要T>>τmax。
仿真结果表明,速度分辨率ΔV随调频周期T的加快而增大。
若要满足速度分辨率性能指标,调频周期T 应满足T≥0 .5ms。
在满足性能指标的要求下,可令B为250MHz,T则被设定为1ms。
由此可得到当Rmax=50m时,由式(2-36)和式(2-39)可得差频fbmax≈ 83.4kHz。
基于本课题硬件平台资源的考虑,令AD采样率为200kHz。
3.4 恒虚警检测参数选择雷达系统中的信号检测是在含有各种杂波干扰和噪声的环境下进行的,故恒虚警检测参数的合理选择对提高雷达检测性能起着至关重要的作用。
由于检测器可同时受到目标的回波差拍信号、背景噪声等干扰,因此必须具备对不同的对象进行区别处理的能力,即设置一个检测门限值。
如果信号检测值超过该门限值,则认为目标存在,否则认为目标不存在。
门限值设置过高会导致可以被检测到的远距离弱小目标被过滤而丢失;门限值设置过低,会使虚警概率大幅升高。
故检测门限值的选择直接影响到雷达系统检测目标的能力。
恒虚警检测的门限因子T与虚警概率Pfa、参考单元数Pfa有关。
设置信噪比为10db,虚警概率为10-6,参考单元数分别设定为8 、16和32时,同时使用CA-CFAR检测器和OS-CFAR检测器对加入了六个目标的待仿真信号进行检测,其相应结果展示在下图3-2、图3-3和图3-4中。
从上面可以清晰看出,当N达到32时,此二种检测器均出现虚警率过分上升的现象,但是 OS-CFAR依然优于CA-CFAR。
综上所述,在参考单元数N设置合理的情况下,OS-CFAR检测器能够在多目标环境下具有较好的鲁棒性,故本课题采用它完成对目标的检测,且设置Pfa=10-6,参考单元数N则参考此前试验中的中间值16。
影响OS-CFAR检测器性能的参数除了虚警概率Pfa、参考单元数N,不容忽视的还有序值。
通常情况下,kopt=3/4 N。
固定的虚警概率和参考单元数的情况下,选取不同序值k对 OS-CFAR 检测器性能的影响。
图3-5仿真结果表明,当序值k=10时,出现虚警概率上升的现象。
当序值k=12时,OS-CFAR检测器性能良好,无虚警率过高或丢失目标现象。
综上所述,在OS-CFAR检测器虚警概率恒定的情况下,选取序值k=12。
4.系统仿真经过以上推导和仿真结果分析,结合各个因素综合考虑得出的既满足指标要求同时在工程上可实现的参数如表4.1所示。
仿真结果显示,使用上述参数设计的雷达系统功能正常,通过多次观测仿真结果,可以得到距离测量平均误差δR≈0.4m,速度测量误差δv≈0 .3 m/s。
5.结论LFMCW雷达系统的设计是一项复杂且需综合考虑的过程,不仅要求能够不断深化地理解理论知识,还需要在此基础上,勤于总结,勇于突破,善于创新,仿真技术在设计上的广泛应用更有助于提升效率、完善改进。
参考文献[1]杨建宇,凌太兵,贺峻.LFMCW 雷达运动目标检测与距离速度去耦合[J].电子与信息学报,2004,23(02): 169-173.[2]张惠敏,韩峻峰,潘盛辉,覃永新,杨叙.基于FPGA的24GHz 雷达测距系统[J].仪表技术与传感器,2012,22(10):98-100.[3]刘贵喜,凌文杰,杨万海.线性调频连续波雷达多目标分辨的新方法[J].电波科学学报,2006,34(01):79-83.[4]窦秀梅,赵振纲.基于IP核的FPGA FFT算法模块的设计与实现[J].无线电工程,2008,10(08):29-31.[5]S.M.Patole,M.Torlak,D.Wang,M.Ali.Automotive radars:A review of signal processing techniques.IEEE Signal Processing Magazine,vol.34,no.2,pp.22-35,March 2017.。