自动控制原理(胡寿松第5版)及答案
自动控制原理-胡寿松第5版-课后习题及答案-完整(汇编)

⾃动控制原理-胡寿松第5版-课后习题及答案-完整(汇编)《⾃动控制原理》习题课习题讲解第⼆章内容1、试建⽴图⽰电路各系统的传递函数和微分⽅程。
解:(a) 应⽤复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (1)2)()(R s Uc s I =(2)联⽴式(1)、(2),可解得: Cs R R R R Cs R R s U s U rc 212112)1()()(+++=微分⽅程为: rr c c u CR dt du u R CR R R dtdu 121211+=++(2) 由图解2-1(d )可写出[]Cs s I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Cs s I c R c -= (6)[]Cs s I s I R s I s U c R c c 1)()()()(++= (7)联⽴式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c微分⽅程为 r r r c c c u R C dt du CR dt du u R C dt du CR dt du 222222221213++=++2、试建⽴图⽰电路各系统的传递函数解:由图可写出s C R s U c 221)(+ = s C R s C R s C R s U r 111112111)(+?++ 整理得)()(s U s U r c = 1)(1)(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 3、试⽤结构图等效化简求图2-32所⽰各系统的传递函数)()(s R s C 。
解(a )所以: 432132432143211)()(G G G G G G G G G G G G G G s R s C ++++=(b )所以: H G G G s R s C 2211)()(--=(c )所以:32132213211)()(G G G G G G G G G G s R s C +++= (d )所以:2441321232121413211)()(H G G G G G G H G G H G G G G G G G s R s C ++++++= (e )所以: 2321212132141)()(H G G H G H G G G G G G s R s C ++++=4、电⼦⼼脏起博器⼼律控制系统结构图如题3-49图所⽰,其中模仿⼼脏的传递函数相当于⼀纯积分环节。
自动控制原理+第五版课后习题答案 胡寿松 免费在线阅读

2-20 与 2-18 同
C(S)二 G4 N(S)~1 + G2G4+G3G4
■ 2Ua) C⑻- GjG^+G^d + G,!!, ) 丄R(s) - 1 + G1H1+ G3H2 +G1G2G3H1H2 +G1HiG3H2 E(s)__(1 + G3H2)_G4G3H2H!_
R(s) ~ /+GZH; +G3H2
l)
s
3-11劳斯表变号两次, 有两个特征根在s右半平面, 系统不稳定。
3-12(1) 有一对纯虚根: s1>2 = ±j2 系统不稳定。 (2) s12=±jVI s34=±l s5 =1 s6 =-5 系统小稳定。 (3) 有一对纯虚根:sh2 =±j75系统不稳定。
3-13 0 < k < 1.7
s
6-3 取 k = 20 < = 8 gJ«)= 1^0 045 验算得: <=: 7.93,/ = 62.1°
36
(36-co2) + jl3
5-3 ess (t) = 0.632sm(t + 48.4°)- 0.79cos(2t 一 26.57°)
或: css(t) = 0.447sin(t + 3.4°)-0.707cos(2t一
90°) 5-4
0.653 wn =1.848
ess(t) = r(t) — css(t)
ch - ehgf+afch
C(s) _ bcde + ade + (a + bc)(l + eg) Rj (s) 1 + cf + eg + bcdeh + cefg + adeh
自动控制原理第五版 胡寿松课后习题答案完整版

第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
胡寿松版完整答案自动控制原理第五版课后习题答案

2-1 设质量-弹簧-摩擦系统如图2—1所示,途中f 为黏性摩擦系数,k 为弹簧系数,系统的输入量为力()p t ,系统的输出量为质量m 的位移()x t 。
试列出系统的输入输出微分方程。
解:显然,系统的摩擦力为dtt dx f)(,弹簧力为)(t kx ,根据牛顿第二运动定律有 22)()()()(dtt x d m t kx dt t dx f t p =-- 移项整理,得系统的微分方程为)()()()(22t p t kx dtt dx f dt t x d m =++2—2 试列写图2—2所示机械系统的运动微分方程。
解:由牛顿第二运动定律,不计重力时,得2112211112[()()]d y dyk y t y t M k y f F dt dt-+=-+整理得2111121222()()()d y dyM f k k y t F k y t dt dt+-+=-2—3 求下列函数的拉氏变换。
图2-1 习题2-1 质量-弹簧-摩擦系统示意图图2-2 习题2-2 机械系统示意图(1))sin 1(3)(t t f -= (2)at te t f =)( (3))43cos()(π-=t t f解:(1)[()][3(1sin )]L f t L t =-2223([1][sin ])113()13(1)(1)L L t s s s s s s =-=-+-+=+ (2)at te t f =)(21[]L t s=21[()][]()at L f t L te s a ==-(3)()cos(3))cos(3)]42f t t t t π=-=+[()])cos(3)]2L f t t t =+222[sin(3)][cos(3)])3)29939L t L t s s s s s =+=++++=+2—4 求下列函数的拉氏反变换 (1))5)(2(1)(++-=s s s s F(2))3(6)(2+-=s s s s F(3))1(152)(22++-=s s s s s F解:(1)112()(2)(5)25s F s s s s s --==+++++1112[()][]25L F s L s s ---=+++ 112512[]2[]252ttL L s s e e ----=-+++=-+ (2)226211()(3)3s F s s s s s s --==++++ 112211[()][]3L F s L s s s ---=+++ 111231112[][][]321t L L L s s s t e ----=+-+=+- (3)22225115()(1)1s s s F s s s s s -+-==+++ 11215[()][]1s L F s L s s ---=++11215[][]11cos 5sin s L L s s t t ---=++=+-2—5 试分别列写图2—3中各无源网络的微分方程(设电容C 上的电压为)(t u c ,电容1C 上的电压为)(1t u c ,以此类推)。
自动控制原理胡寿松第5版课后习题及答案完整

(s)
Ea(s)CeΩm
(s)
aa
CmIa(s)Mm(s)
Mm(s)−Mc(s)Ω
(s)
Jmsfm
得到系统结构图如下:
Mc
Ua(s)
1Ia(s)CmMm
1Ωm(s)
-Las+RaJms+fm
Ce
Ωm(s)
Cm
LasRa
1
JmsfmCm
Ua(s)
1CeCm
LasRa
1
Jmsfm
(LasRa)(Jmsfm)CeCm
K1(xi−x)f(x&i−x&0)K2x0
移项整理得系统微分方程
fdx0(K
dt1
K2
)x0
fdxi
dt
K1xi
对上式进行拉氏变换,并注意到运动由静止开始,即
xi(0)x0(0)0
则系统传递函数为
X0(s)
Xi(s)
fsK1
fs(K1K2)
2-3试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
(22
1)dtR12
dt2
2
R
1dt
2-5设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1)
2x&(t)x(t)t;
解:对上式两边去拉氏变换得:
(2s+1)X(s)=1/s2→X(s)
11
s2(2s1)s2
−1
s
4
2s1
运动模态e−0.5t
所以:x(t)t−2(1−e
解:对输出响应取拉氏变换的:
C(s)1−1
1
《自动控制原理》 胡寿松第五章习题解答

= 0.447 sin(t + 3.4 0 ) − 0.354 cos(2t − 90 0 )
e ss (t ) = c ss (t ) − r (t ) = 0.447 sin(t + 3.4 0 ) − 0.354 cos(2t − 90 0 ) − sin(t + 30 0 ) + cos(2t − 45 0 )
5-4 典型二阶系统的开环传递函数
2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
ξ = 0.6532
G( s) H ( s) =
K (τs + 1) ; s 2 (Ts + 1)
K ,τ , T > 0
试分析并绘制 τ > T 和 T > τ 情况下的概略开环幅相曲线。 解:相频特性为
ϕ (ω ) = −180 0 + arctan τω − arctan Tω
(1)
τ > T 时, ϕ (ω ) > −180 0 概略开环幅相曲线如下
胡寿松自动控制原理习题解答第五章
5-2 若系统单位阶跃响应为
h(t ) = 1 − 1.8e −4t + 0.8e −9t (t ≥ 0)
试确定系统的频率特性。 解:对单位阶跃响应取拉氏变换得:
1 1.8 0.8 36 − + = s s + 4 s + 9 s ( s + 4)( s + 9)
自动控制原理胡寿松第五版第三章答案汇编
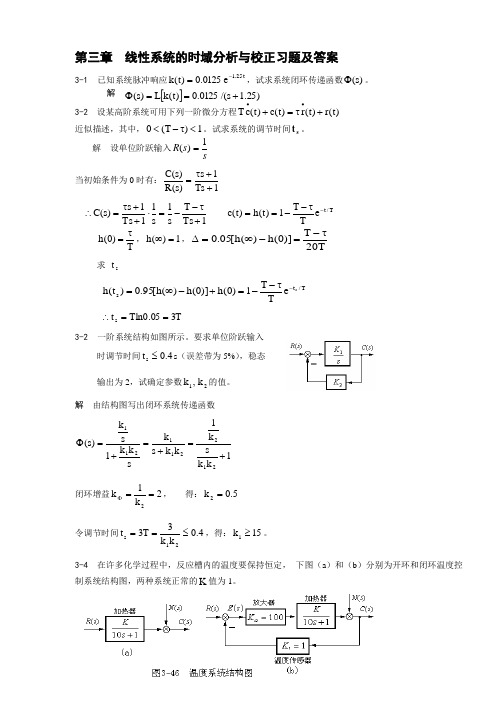
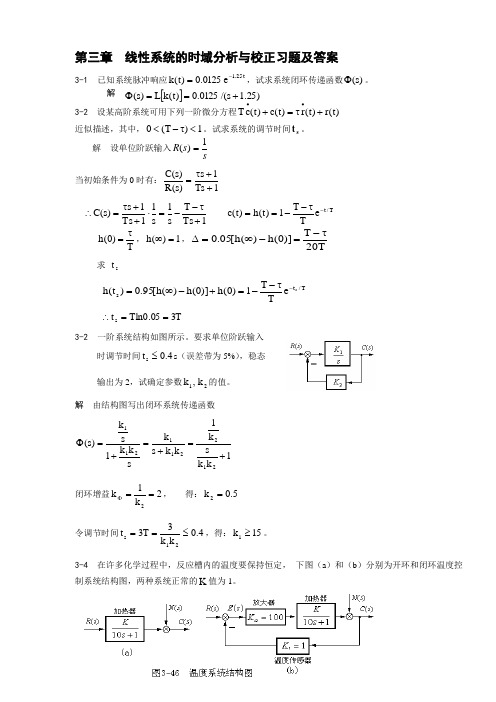
第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t25.1e0125.0)t (k -=,试求系统闭环传递函数)s (Φ。
解 [])25.1s /(0125.0)t (k L )s (+==Φ3-2 设某高阶系统可用下列一阶微分方程)t (r )t (r )t (c )t (c T +τ=+••近似描述,其中,1)T (0<τ-<。
试求系统的调节时间s t 。
解 设单位阶跃输入ss R 1)(= 当初始条件为0时有:1Ts 1s )s(R )s (C ++τ= 1Ts T s 1s 11Ts 1s )s (C +τ--=⋅++τ=∴ T/t e T T 1)t (h )t (c -τ--==T )0(h τ=,1)(h =∞,20T T )]0(h )(h [05.0τ-=-∞=∆求 s tT/t s s eTT 1)0(h )]0(h )(h [95.0)t (h -τ--=+-∞= 3T 05.ln0T t s ==∴3-2 一阶系统结构如图所示。
要求单位阶跃输入时调节时间4.0t s ≤s (误差带为5%),稳态 输出为2,试确定参数21k ,k 的值。
解 由结构图写出闭环系统传递函数1k k sk 1k k s k sk k 1s k )s (212211211+=+=+=Φ闭环增益2k 1k 2==Φ, 得:5.0k 2= 令调节时间4.0k k 3T 3t 21s ≤==,得:15k 1≥。
3-4 在许多化学过程中,反应槽内的温度要保持恒定, 下图(a )和(b )分别为开环和闭环温度控制系统结构图,两种系统正常的K 值为1。
解 (1)对(a )系统: 1s 1011s 10K )s (G a +=+=, 时间常数 10T = 632.0)T (h = (a )系统达到稳态温度值的63.2%需要10秒;对(b )系统:1s 10110101100101s 10100)s (b+=+=Φ, 时间常数 10110T = 632.0)T (h = (b )系统达到稳态温度值的63.2%需要0.099秒。
自动控制原理胡寿松第五版第三章答案
第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t 25.1e 0125.0)t (k -=,试求系统闭环传递函数)s (Φ。
解 [])25.1s /(0125.0)t (k L )s (+==Φ3-2 设某高阶系统可用下列一阶微分方程)t (r )t (r )t (c )t (c T +τ=+∙∙近似描述,其中,1)T (0<τ-<。
试求系统的调节时间s t 。
解 设单位阶跃输入ss R 1)(=当初始条件为0时有:1T s 1s )s (R )s (C ++τ= 1Ts T s 1s 11Ts 1s )s (C +τ--=⋅++τ=∴ T/t e T T 1)t (h )t (c -τ--== T )0(h τ=,1)(h =∞,20T T )]0(h )(h [05.0τ-=-∞=∆求 s tT/t s s e TT 1)0(h )]0(h )(h [95.0)t (h -τ--=+-∞= 3T 05.ln0T t s ==∴3-2 一阶系统结构如图所示。
要求单位阶跃输入时调节时间4.0t s ≤s (误差带为5%),稳态 输出为2,试确定参数21k ,k 的值。
解 由结构图写出闭环系统传递函数1k k sk 1k k s k sk k 1s k )s (212211211+=+=+=Φ闭环增益2k 1k 2==Φ, 得:5.0k 2= 令调节时间4.0k k 3T 3t 21s ≤==,得:15k 1≥。
3-4 在许多化学过程中,反应槽内的温度要保持恒定, 下图(a )和(b )分别为开环和闭环温度控制系统结构图,两种系统正常的K 值为1。
解 (1)对(a )系统: 1s 1011s 10K )s (G a +=+=, 时间常数 10T =632.0)T (h = (a )系统达到稳态温度值的63.2%需要10秒;对(b )系统:1s 10110101100101s 10100)s (b+=+=Φ, 时间常数 10110T = 632.0)T (h = (b )系统达到稳态温度值的63.2%需要0.099秒。