现代机器人
现代机器人的种类

现代机器人的种类
现代机器人是指能够执行自主或预设任务的机械设备,它们可以在工业、医疗、军事、探险等领域发挥重要的作用。
现代机器人的种类繁多,主要可以分为以下几类:
1. 工业机器人:主要用于生产线上的制造、装配和包装等工作。
常见的工业机器人包括SCARA机器人、Delta机器人、直线型机器人等。
2. 服务机器人:主要用于服务和辅助人类的生活,如清洁机器人、餐厅服务机器人、陪伴机器人等。
3. 医疗机器人:主要用于医疗领域的手术、诊断和治疗等工作,如手术机器人、康复机器人、心电图机器人等。
4. 军事机器人:主要用于军事领域的侦察、救援、炮火支援等工作,如无人机、地面机器人、水下机器人等。
5. 探险机器人:主要用于探险和科学研究领域,如火星探测器、深海探测器、极地探险机器人等。
以上是现代机器人的主要种类,随着科学技术的不断进步,机器人的种类和应用领域将继续扩展。
- 1 -。
现代机器人介绍英语作文

现代机器人介绍英语作文【英文版】Introduction to Modern RobotsHello everyone, today we will explore the fascinating world of modern robots. Robotics has come a long way in recent years, and now we have machines that can perform a wide range of tasks, from simple repetitive jobs to complex tasks that require human-level intelligence.Modern robots are highly versatile and can work in a variety of environments, from factories to homes. They are designed to work in teams with humans, performing tedious and dangerous tasks that would otherwise be beyond human capabilities. Robots are also being used in healthcare, education, and other fields, where they can provide assistance and support to people in need. One of the most advanced types of robots is the humanoid robot. These robots look and behave like humans, and can perform a range of tasks that require dexterity and precision. They are also becoming more common in social settings, where they can interact with people and provide companionship.However, robots still have a long way to go before they can fullyreplace humans in all tasks. There are many challenges that need to be overcome, including ensuring safety and reliability, developing intelligent algorithms that can make complex decisions, and ensuring that robots are compliant with human values and ethics.总的来说,现代机器人是一个充满机遇和挑战的领域。
现代工业机器人调整及故障排除

现代工业机器人调整及故障排除1. 简介现代工业机器人在生产过程中扮演着重要的角色。
为了确保机器人的稳定运行和高效性能,定期调整及故障排除是必不可少的。
本文档将为您提供关于现代工业机器人调整及故障排除的专业知识和详细步骤。
2. 机器人调整2.1 前期准备在进行机器人调整之前,请确保以下准备工作已完成:- 关闭机器人电源,确保安全。
- 根据需要调整的机器人部件,准备相应的工具和设备。
- 查阅相关机器人说明书,了解调整方法和注意事项。
2.2 调整步骤以下是一些基本的调整步骤,具体步骤可能因机器人型号和制造商而异:1. 校准机器人关节:使用专用工具校准机器人的各个关节,确保运动精度。
2. 调整末端执行器:根据需要,调整末端执行器的姿态和位置,以适应不同任务。
3. 优化路径和轨迹:通过软件优化机器人的运动路径和轨迹,提高运行效率。
4. 调整速度和力度:根据任务需求,调整机器人的运动速度和力度。
3. 故障排除3.1 故障诊断当机器人出现故障时,首先进行故障诊断。
常见故障现象包括:- 无法启动或运行- 运动异常- 末端执行器无法正常工作- 报警提示3.2 故障排除步骤以下是一些常见的故障排除步骤:1. 检查电源和连接:确保机器人电源正常,所有连接线缆无损坏。
2. 查看报警日志:查阅机器人系统的报警日志,了解故障原因。
3. 检查硬件故障:检查机器人各部件是否有损坏,如电缆、传感器等。
4. 软件故障排除:根据故障现象,通过软件进行排查和修复。
3.3 故障案例分析以下是两个故障案例的分析:案例1:- 故障现象:机器人无法启动。
- 故障原因:电源连接问题。
- 解决方案:检查电源连接,修复损坏的线缆。
案例2:- 故障现象:机器人运动异常。
- 故障原因:关节校准不准确。
- 解决方案:重新校准关节,调整运动参数。
4. 总结现代工业机器人的调整及故障排除是保证生产效率和设备寿命的关键。
通过本文档的学习,您应该已经掌握了调整和故障排除的基本知识和步骤。
现代科技技术机器人作文

现代科技技术机器人作文
哎呀呀, 机器人可真是太神奇啦!嘿嘿。
我第一次看到机器人的时候, 简直惊呆了!它们有的长得方方正正的, 有的长得圆圆的, 还有各种奇奇怪怪的形状呢, 哈哈。
那些会跳舞的机器人呀, 跳起舞来可好看啦!它们的动作好灵活呀, 嘿呀, 就像真正的舞蹈家一样。
我看着它们跳舞, 自己也忍不住跟着扭起来, 哈哈。
还有能说话的机器人呢, 你跟它说话, 它就能回答你, 哎呀, 就像在和一个好朋友聊天一样。
我还见过会做家务的机器人, 它能扫地、擦桌子, 可厉害啦!嘿呀, 要
是我家也有一个这样的机器人就好啦, 那妈妈就不用那么辛苦啦。
我好希望以后能有一个属于自己的机器人呀, 可以陪我玩游戏, 给我讲故事, 嘿嘿。
说不定以后的机器人还能带着我飞呢, 哎呀, 那该多有意思呀!哈哈。
现代机器人基本操作
5 6
SET (YES SET (YES
1 1
SET (YES SET (YES
->START选择为外部 ->PROGRAM选择为外部
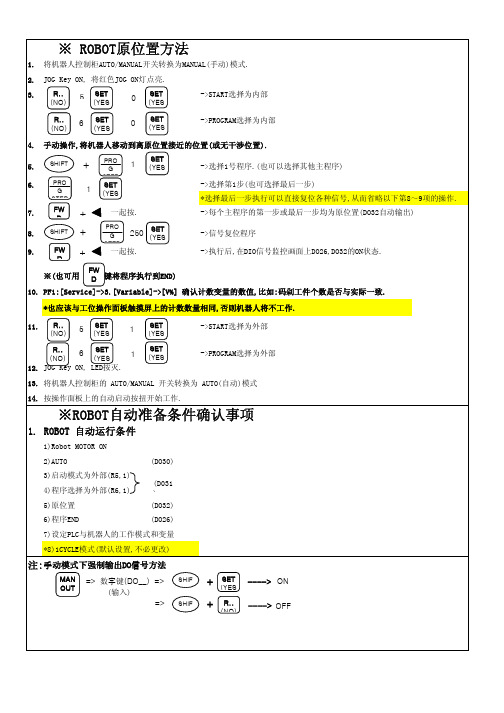
12. JOG Key ON, LED按灭. 13. 将机器人控制柜的 AUTO/MANUAL 开关转换为 AUTO(自动)模式 14. 按操作面板上的自动启动按扭开始工作.
※ROBOT自动准备条件确认事项
1. ROBOT 自动运行条件
1)Robot MOTOR ON 2)AUTO 3)启动模式为外部(R5,1) 4)程序选择为外部(R6,1) 5)原位置 6)程序END (DO30) (D031 ) (DO32) (DO26)
7)设定PLC与机器人的工作模式和变量 *8)1CYCLE模式(默认设置,不必更改)
SET (YES
7. 8. 9.
FW D
SHIFT
+ + +
一起按.
PRO G STEP
250 (YES
SET
->信号复位程序 ->执行后,在DIO信号监控画面上DO26,DO32的ON状态.
FW D
一起按.
FW D 键10. PF1:[Service]->3.[Variable]->[V%] 确认计数变量的数值,比如:码剁工件个数是否与实际一致. *也应该与工位操作面板触摸屏上的计数数量相同,否则机器人将不工作. 11.
4. 手动操作,将机器人移动到离原位置接近的位置(或无干涉位置). 5. 6.
SHIFT PRO G STEP
+
1
PRO G STEP
1
SET (YES
十大人机协作机器人

十大人机协作机器人人机协作机器人已成为现代工业领域的重要组成部分,它们通过与人类紧密合作,实现工作效率的提升和生产环境的改善。
本文将介绍十个具有代表性的人机协作机器人,探讨其在不同领域的应用和优势。
一、机器人一:产业机器人产业机器人是人机协作机器人的重要类型之一,广泛应用于制造业等领域。
它们能够与人类工作人员协同完成各种复杂任务,提高生产效率和产品质量。
二、机器人二:医疗机器人随着医疗行业的快速发展,医疗机器人在手术室、护理等领域发挥着关键作用。
它们能够为医生提供准确的手术辅助,提高手术的安全性和精准性。
三、机器人三:服务机器人服务机器人广泛应用于社区、酒店和餐饮等行业,能够为人们提供各种便利的服务。
它们能够接待客人、提供导航和娱乐等功能,提升用户体验。
四、机器人四:农业机器人农业机器人在现代农业中发挥着重要的作用,能够应对农业生产过程中的各种挑战。
它们能够自动完成播种、喷洒农药和采摘等任务,提高农作物的产量和质量。
五、机器人五:教育机器人教育机器人被广泛应用于学校和教育机构,能够帮助学生提高学习效果。
它们能够与学生互动、辅助教学和提供学习资源,激发学生的学习兴趣和创造力。
六、机器人六:物流机器人物流机器人在仓储和物流领域发挥着重要作用,能够提高物流运输的效率和准确性。
它们能够自动化完成货物的搬运、分拣和配送等任务,降低人力成本和运输时间。
七、机器人七:建筑机器人建筑机器人在建筑工地和施工领域发挥着重要作用,能够提高施工效率和安全性。
它们能够完成砌砖、混凝土浇筑和结构检查等任务,减少人工劳动和施工事故。
八、机器人八:安防机器人安防机器人广泛应用于公共场所和重要设施的安全保卫工作中。
它们能够巡逻、监控和报警等,提高安全防范的效果和响应速度。
九、机器人九:航天机器人航天机器人在航天探索和发射任务中发挥着重要作用。
它们能够进行空间维修、实验数据采集和卫星组装等任务,推动航天技术的不断发展。
十、机器人十:环境机器人环境机器人能够应对环境污染和灾害事件,保护生态环境和人类生命安全。
生活中常见的10种机器人

生活中常见的10种机器人1. 家庭助理机器人家庭助理机器人是现代家庭中常见的一种机器人。
它们通常配备有人工智能功能,能够进行语音交互和执行各种任务。
这些机器人可以帮助家庭成员管理日程安排、提供天气预报、播放音乐等。
2. 清洁机器人清洁机器人在日常生活中扮演着越来越重要的角色。
它们能够自主清洁地面、地毯等表面,节省了人们大量的清理时间和精力。
一些清洁机器人还具备自动回充功能,当它们的电池接近耗尽时,会自动返回充电器。
3. 老人陪伴机器人随着人口老龄化的加剧,老人陪伴机器人成为了一种常见的机器人。
这些机器人能够提供陪伴、监护和娱乐功能,为老年人提供安全感和社交互动。
它们可以陪伴老人打发时间,提醒老人服药或者做日常活动。
4. 医疗机器人医疗机器人在医疗领域中扮演着重要的角色。
它们可以执行手术任务、进行病人监测和护理,还能减轻医务人员的工作压力。
一些医疗机器人还具备远程诊断和治疗的能力,可以为偏远地区提供医疗服务。
5. 教育机器人教育机器人在学校和家庭教育中越来越常见。
它们能够辅助教师进行教学,提供个性化的学习经验。
教育机器人可以帮助学生提高学习效率,培养创造力和解决问题的能力。
6. 物流机器人物流机器人被广泛应用于仓库和物流行业。
它们可以自主导航、搬运货物和执行库存管理任务。
物流机器人的应用可以提高物流效率,降低劳动成本,并且能够避免人为错误。
7. 农业机器人农业机器人用于农场和种植业,可以进行种植、灌溉和采摘等任务。
它们可以提高农业生产效率,减少劳动力投入,减轻农民的劳动负担。
8. 安防机器人安防机器人在保安和警察部门中发挥着重要的作用。
它们可以巡逻、监控和检测潜在的安全威胁。
安防机器人的应用可以提高安全水平,降低人身伤害的风险。
9. 餐饮机器人餐饮机器人在饭店和快餐行业中越来越受欢迎。
它们可以自主接待客人、点菜、送餐和结账。
餐饮机器人的应用可以提高服务质量,减少人员成本,并且能够减少传染病传播的风险。
现代机器人发展历程

现代机器人发展历程全文共四篇示例,供读者参考第一篇示例:机器人的概念最早可以追溯到古代,古代希腊人构建过多种机械设备来执行工作。
但直到20世纪,才有了真正意义上的机器人出现。
20世纪初,意大利工程师Capek首次将“机器人”一词用于戏剧作品中,这标志着机器人这一概念正式进入人们的视野。
20世纪40年代,随着电子技术的发展,机器人开始慢慢跻身人类的工作领域。
1954年,美国的一家公司生产了世界上第一台数字控制数控机床,这是机器人技术在工业中的首次应用。
接着在60年代,美国MIT大学研究人员研发出了可以模仿人类行走的机器人,并取名为“沉默犬”。
70年代至80年代,随着计算机技术的快速发展,机器人技术也得到了迅猛的发展。
1989年,日本公司推出了一款名为“ASIMO”的机器人,它能够行走、跑步、跳跃等多种动作,这标志着机器人技术进入了智能化的新阶段。
2000年后,随着人工智能技术的发展,机器人的智能水平越来越高。
各种智能机器人相继推出,如能够与人类进行对话的聊天机器人、能够自主学习的“AlphaGo”机器人等,这些机器人不仅仅可以执行简单的机械动作,还可以模拟人类的思维和行为,具有较高的智能水平。
未来,随着人工智能和机器人技术的不断进步,机器人将会越来越多地应用于各个领域。
例如在医疗领域,智能机器人将可以进行手术操作,减少医疗事故的发生;在农业领域,机器人将可以自动化地完成耕作、种植、喷洒等工作;在商业领域,机器人将可以取代人工劳动力,提高生产效率。
现代机器人的发展历程可以说是经历了从简单机械动作到智能化的飞跃。
机器人已经不再是科幻电影中的幻想,而是成为了人类工作生活中不可或缺的一部分。
未来,随着技术的不断进步,机器人的发展潜力将会越来越大,为人类带来更多的便利和辅助。
第二篇示例:现代机器人发展历程随着科技的不断进步和发展,现代机器人已经成为了人类社会中不可或缺的一部分。
从最初的简单自动化机器到如今的智能机器人,其发展历程经历了漫长而曲折的道路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
型号 HAO06 HH010L HH020 HH020L HH030L HH050 YS080 YS100A HH100SL HH130L HS150L HP160 HS1565D HS165DC HS165 HS165S HS200 HS200S HX200L HX300 HX300L HX400 HX400S
应
应用 电焊 搬运 密封 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 其他 S回旋 ±180° ±185° ±185° ±180° ±180° ±180° ±180° ±180° ±180° ±180° ±180° ±180° ±170° ±30° ±180° ±180° ±180° ±180° ±180° ±180° ±180° ±180° ±180° H前后
最大工作范围 V上下 R2旋转2 B弯曲 ±135° ±135° ±135° ±135° ±125° ±125° ±125° ±125° ±125° ±125° ±130° ±130° ±130° ±130° ±130° ±125° ±125° ±125° ±120° ±120° ±120° ±120°
允许力矩 R1旋转1 0.6kgf.m 1.1kgf.m 2kgf.m 2kgf.m 10.2kgf.m 15kgf.m 20.4kgf.m 25kgf.m 50kgf.m 50kgf.m 50kgf.m 50kgf.m 50kgf.m 50kgf.m 50kgf.m 50kgf.m 72kgf.m 72kgf.m 62kgf.m 70kgf.m 70kgf.m 84kgf.m 84kgf.m
冲压搬运
冲压搬运
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
冲压搬运 冲压搬运 码垛
正180°至负60° 正110°至负80° ±180° 正195°至负70° 正260°至负170°±195° 正195°至负70° 正260°至负170°±195° 正180°至负65° 正260°至负160°±195° 正180°至负65° 正180°至负80° ±360° 正180°至负65° 正180°至负80° ±360° 正180°至负65° 正180°至负80° ±360° 正180°至负65° 正180°至负80° ±360° 正125°至负70° 正125°至负70° ±360° 正155°至负10° 正155°至负10° ±360° 正155°至负10° 正155°至负10° ±360° 正135°至负10° 正135°至负10° 正160°至负30° 正160°至负30° ±360° 正120°至负35° 正120°至负35° ±360° 正155°至负10° 正155°至负10° ±360° 正125°至负70° 正125°至负70° ±360° 正155°至负10° 正155°至负10° ±360° 正125°至负70° 正125°至负70° ±360° 正165°至负15° 正165°至负15° ±360° 正165°至负15° 正165°至负15° ±360° 正165°至负15° 正165°至负15° ±360° 正165°至负15° 正165°至负15° ±360° 正95°至负50° 正95°至负50° ±360°
负载kg 6kg 10kg 20kg 20kg 30kg 50kg 80kg 100kg 100kg 130kg 150kg 160kg 165kg 165kg 165kg 165kg 200kg 200kg 200kg 300kg 300kg 400kg 400kg
结构 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节 多关节
现 代 机 器 人
0~45° (27ቤተ መጻሕፍቲ ባይዱ318K)
0~45° (273318K)
近似 额定 选择 电弧 重量 功率 焊 140kg ● 4.4 230kg ● kVA 225kg ● 535kg 650kg 645kg 645kg 645kg 1450kg 1400kg 1295kg 8kVA 1495kg 810kg 576kg 1250kg 1540kg 1300kg 1595kg 2265kg 2435kg 10.5 2685kg kVA 2620kg 2910kg
允许力矩 B弯曲 1.2kgf.m 2.5kgf.m 4kgf.m 4kgf.m 20.4kgf.m 22kgf.m 40.8kgf.m 50kgf.m 105kgf.m 105kgf.m 105kgf.m 100kgf.m 100kgf.m 105kgf.m 105kgf.m 136kgf.m 136kgf.m 132kgf.m 170kgf.m 170kgf.m 200kgf.m 200kgf.m
臂长 安装 重复定位 工作环 自由度 mm 位置 精度 境温度 1394 1964 1742 3281 2535 2239 2239 2239 3507 3082 3082 3128 1350 920 2666 3090 2666 3090 200 300 300 400 400 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 6轴 ±0.05mm ±0.06mm ±0.05mm 地板/ ±0.08mm 侧墙/ 顶棚 ±0.08mm ±0.06mm ±0.06mm ±0.06mm 架台 ±0.15mm 地板 ±0.15mm 地板 ±0.15mm 地板 ±0.2mm 地板 ±0.06mm 地板 ±0.06mm 地板 ±0.06mm 架台 ±0.15mm 地板 ±0.06mm 架台 ±0.15mm 地板 ±0.2mm 地板 ±0.15mm 地板 ±0.20mm 地板 ±0.15mm 架台 ±0.2mm
最大速度 R1旋转1 ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° ±360° S回旋 H前后 V上下 170°/S 190°/S 190°/S 180°/S 150°/S 175°/S 160°/S 140°/S 95°/S 95°/S 95°/S 120°/S 90°/S 105°/S 105°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 85°/S R2旋转2 335°/S 380°/S 380°/S 360°/S 250°/S 250°/S 230°/S 200°/S 170°/S 170°/S 150°/S 150°/S 150°/S 150°/S 150°/S 135°/S 135°/S 120°/S 110°/S 100°/S 100°/S 100°/S B弯曲 335°/S 380°/S 380°/S 380°/S 250°/S 250°/S 230°/S 200°/S 155°/S 155°/S 145°/S 145°/S 145°/S 145°/S 145°/S 120°/S 120°/S 120°/S 110°/S 100°/S 100°/S 100°/S R1旋转1 500°/S 600°/S 600°/S 600°/S 350°/S 350°/S 350°/S 300°/S 270°/S 270°/S 220°/S 300°/S 220°/S 180°/S 220°/S 220°/S 190°/S 190°/S 180°/S 180°/S 160°/S 160°/S 160°/S R2旋转2 1.2kgf.m 2.5kgf.m 4kgf.m 4kgf.m 20.4kgf.m 22kgf.m 40.8kgf.m 50kgf.m 105kgf.m 105kgf.m 105kgf.m 100kgf.m 100kgf.m 105kgf.m 105kgf.m 136kgf.m 136kgf.m 132kgf.m 170kgf.m 170kgf.m 200kgf.m 200kgf.m
170°/S 170°/S 190°/S 180°/S 190°/S 180°/S 175°/S 175°/S 150°/S 140°/S 175°/S 175°/S 170°/S 140°/S 150°/S 130°/S 105°/S 85°/S 105°/S 85°/S 95°/S 95°/S 130°/S 120°/S 100°/S 90°/S 100°/S 90°/S 105°/S 105°/S 105°/S 105°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 95°/S 85°/S 85°/S