atmega128L串口通信详解
基于Atmega128和SJA1000的CAN总线通信应用设计
0 引 言
随着单片机在工业控制领域的应用越来越广 泛, 在很多场合都需要用单片机对现场的信息进行 采集与处理, 并与主机进行通信, 但往往会遇到长远 距离和大数据量传输不足的问题, 通过 C A N总线可 以解决此问题。本文用 A t m e g a 1 2 8实现主从节点相 互通信的简单电路, 但此单片机不能独立地满足要
第4 1卷第 1期 5 2 2 0 1 4年 2月 2 5日
数 字 通 信 D i g i t a l C o m m u n i c a t i o n
V o l 4 1 ,N o . 1 F e b . 2 5 2 0 1 4
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 3 8 2 4 . 2 0 1 4 . 0 1 . 0 1 4
本文 芯 片 工 作 在 P e l i C A N 模 式 下, 将芯片的 M O D E引脚置 1 , 即让 S J A 1 0 0 0的外部控制总线采3 Βιβλιοθήκη n t e l 模式 [ 。 用I
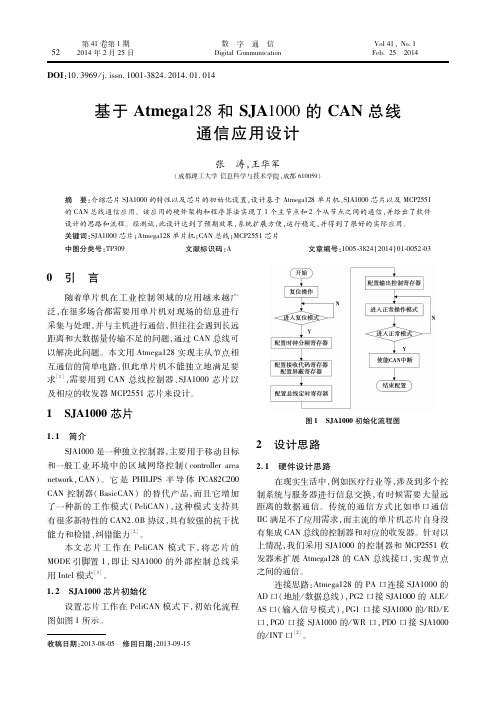
1 . 2 S J A 1 0 0 0芯片初始化 设置芯片工作在 P e l i C A N模式下, 初始化流程 图如图 1所示。
2 ] 能力和检错、 纠错能力 [ 。
图1 S J A 1 0 0 0初始化流程图
2 设计思路
2 . 1 硬件设计思路 在现实生活中, 例如医疗行业等, 涉及到多个控 制系统与服务器进行信息交换, 有时候需要大量远 距离的数据通信。传统的通信方式比如串口通信 I I C满足不了应用需求, 而主流的单片机芯片自身没 有集成 C A N总线的控制器和对应的收发器。针对以 上情况, 我们采用 S J A 1 0 0 0的控制器和 M C P 2 5 5 1收 发器来扩展 A t m e g a 1 2 8的 C A N总线接口, 实现节点 之间的通信。 A t m e g a 1 2 8的 P A口连接 S J A 1 0 0 0的 连接思路: A D口( 地址 / 数据总线) , P G 2口接 S J A 1 0 0 0的 A L E / A S 口( 输入信号模式) , P G 1口接 S J A 1 0 0 0的 / R D / E 口, P G 0口接 S J A 1 0 0 0的 / WR口, P D 0口接 S J A 1 0 0 0 [ 2 ] 的/ I N T口 。
ATMEGA128实验开发板用户手册
ATMEGA128实验开发板用户手册V1.32011年5月E-mail: sdfdlut@1. ATMEGA128单片机概述ATMEGA128单片机是ATMEL公司推出的一款基于AVR内核,采用RISC结构,低功耗CMOS的8位单片机。
由于在一个周期内执行一条指令,ATMEGA128可以达到接近1MIPS/MHz的性能。
其内核将32个工作寄存器和丰富的指令集联结在一起,所有的工作寄存器都与ALU(逻辑单元)直接连接,实现了在一个时钟周期内执行一条指令可以同时访问两个独立的寄存器。
这种结构提高了代码效率,是AVR的运行速度比普通的CISC单片机高出10倍。
ATMEGA128单片机具有以下特点:128KB的可在系统编程/应用编程(ISP/IAP)Flash 程序存储器,4KB E2PROM,4KB SRAM,32个通用工作寄存器,53个通用I/O口,实时时钟计数器(RTC),4个带有比较模式灵活的定时器/计数器,2个可编程的USART接口,一个8为面向字节的TWI(I2C)总线接口,8通道单端或差分输入的10位ADC(其中一个差分通道为增益可调),可编程带内部振荡器的看门狗定时器,一个SPI接口,一个兼容IEEE 1149.1标准的JTAG接口(用于在线仿真调试和程序下载),6种可通过软件选择的节电模式。
2. ATMEGA128实验开发套件本实验开发套件包括:●测试通过的MEGA128实验板1块;●配套资料光盘1张;●AVR ISP并口下载线1条;●5110液晶模块1个;●遥控器1个;●USB ASP下载线(选配);●AVR JTAGICE仿真器(选配)。
其中资料光盘的内容主要包括:●ATMEGA128实验开发板用户手册.pdf(本文档);●AVR教程:⏹WINAVR 使用入门.pdf⏹AVR Studio 使用入门.pdf⏹AVR基本硬件线路设计与分析.pdf⏹芯艺的AVR_GCC教程.pdf⏹AVR的IO结构分析与范例.mht⏹AVR高速嵌入式单片机原理与应用●芯片手册(包括24C02、74HC595以及中文的I2C协议文档等内容)●开发工具软件;⏹AVR Studio V4.12;⏹WINAVR(GCC) 编译器;⏹IAR for AVR V4.10A;⏹并口下载工具PONYPROG V2.06;⏹ICCAVR 双龙提供;图3 新建工程对话框点击Next,进入第三步。
Atmega128开发板使用说明书
Atmega128开发板使用说明书概要介绍Atmega128开发板上硬件资源丰富,接口齐全,基本上涵盖了Atmega128单片机所能涉及到的所有功能,可以满足单片机开发工程师和电子爱好者的开发实验的需求,或者高校电子、计算机专业学生的学习实验的需要。
按照正规产品的要求设计,不纯粹是实验样品,器件选型、原理图、PCB设计的时候都充分考虑了可靠稳定性。
Atmega128的IO口资源丰富,板上所以接口都是独立使用的,不需要任何跳线进行设置, IO口外围扩展使用了2片锁存器74HC574,既可以使实验变得更加简单方便,又能让实验者掌握更多的单片机设计知识。
提供配套软件源代码,学习板的每个实验都有与其相对应的软件代码,是版主从多年的工作经验中提取出来的,并经过优化,具有较高的参考价值。
编程简单,学习板编程不需要专用烧录器,利用计算机的并口即可进行编程,速度快、操作简单。
1.产品清单Atmega128开发板的配件清单如下,当您第一次拿到产品的时候,请参照下图认真核对包装内配件是否齐全,以及各配件是否完好无损。
请按照下图安装122*32 LCD,lCD的一脚对准122*32 LCD插座的一脚,切记不要插反2.硬件布局说明步进电机接口直流电机接口数字温度传感器SD卡插座光敏电阻ADC输入电位器NTC热敏电阻JTAG接口继电器接口9V电源输入接口DAC输出接口RS485接口RS232接口红外发射管ISP编程接口LCD对比度调节电位器122 * 32点阵LCD接口16 * 2字符LCD接口红外接收管433M射频模块接口3 *4 矩阵键盘3.接口说明接口管脚顺序的确认方法●对于有卡口的接口,应对着卡口的方向看,最左边为第一个管脚,如下图所示:●对于用螺丝压线的接口,应对着入线的方向看,最左边为第一个管脚,如下图所示:特别提示:ISP下载接口与JTAG接口封装相同,下载程序时使用ISP接口,不要插到JTAG 接口上4.硬件开发环境的建立本站出售的AVR单片机学习板就是一套完整的硬件环境,它由学习板、电源、并口ISP 下载线等组成。
ATmega128单片机概述、系统结构解析知识讲解
2)AVR单片机在软/硬件开销、速度、性能和成本多方 面取得优化平衡,是高性价比的单片机。
3)内嵌高质量的 Flash程序存储器,擦写方便,支持 ISP和IAP,便于产品 的调试、开发、生产、更新。
AT90S1200/2313/8515/8535 AT89C51
高档ATmega系列单片机
ATmega8/16/32/64/128 存储容量为8/16/32/64/128KB ATmega8515/8535
64脚
6/78 导航、制导与控制
内容
1、AVR单片机简介
AVR单片机主要特性 AVR系列单片机的选型
ATmega128单片机 概述、系统结构
夏洁 2009年3月
1
内容
一、 ATmega128单片机概述系统结构
1、AVR单片机简介(主要特性、选型) 2、ATmega128单片机
二、 ATmega128单片机系统结构
2/78 导航、制导与控制
1、AVR单片机简介
ATMEL公司介绍
是世界上著名的高性能、低功耗、非易失性存 储器和数字集成电路的一流半导体制造公司。
1997年,ATMEL公司出于市场需求,推出 了全新配置的精简指令集RISC单片机高速 8位单片机,简称为AVR。
广泛应用于计算机外设、工业实时控制, 仪器仪表、通信设备、家用电器等各个领 域。
3/78 导航、制导与控制
1.1 AVR单片机主要特性
衡量单片机性能的重要指标
高可靠性、功能强、高速度、低功耗、低价位
ATmega128单片机结构框图
Atmega128开发板使用说明书
Atmega128开发板使用说明书概要介绍Atmega128开发板上硬件资源丰富,接口齐全,基本上涵盖了Atmega128单片机所能涉及到的所有功能,可以满足单片机开发工程师和电子爱好者的开发实验的需求,或者高校电子、计算机专业学生的学习实验的需要。
按照正规产品的要求设计,不纯粹是实验样品,器件选型、原理图、PCB设计的时候都充分考虑了可靠稳定性。
Atmega128的IO口资源丰富,板上所以接口都是独立使用的,不需要任何跳线进行设置, IO口外围扩展使用了2片锁存器74HC574,既可以使实验变得更加简单方便,又能让实验者掌握更多的单片机设计知识。
提供配套软件源代码,学习板的每个实验都有与其相对应的软件代码,是版主从多年的工作经验中提取出来的,并经过优化,具有较高的参考价值。
编程简单,学习板编程不需要专用烧录器,利用计算机的并口即可进行编程,速度快、操作简单。
1.产品清单Atmega128开发板的配件清单如下,当您第一次拿到产品的时候,请参照下图认真核对包装内配件是否齐全,以及各配件是否完好无损。
请按照下图安装122*32 LCD,lCD的一脚对准122*32 LCD插座的一脚,切记不要插反2.硬件布局说明步进电机接口直流电机接口数字温度传感器SD卡插座光敏电阻ADC输入电位器NTC热敏电阻JTAG接口继电器接口9V电源输入接口DAC输出接口RS485接口RS232接口红外发射管ISP编程接口LCD对比度调节电位器122 * 32点阵LCD接口16 * 2字符LCD接口红外接收管433M射频模块接口3 *4 矩阵键盘3.接口说明接口管脚顺序的确认方法●对于有卡口的接口,应对着卡口的方向看,最左边为第一个管脚,如下图所示:●对于用螺丝压线的接口,应对着入线的方向看,最左边为第一个管脚,如下图所示:特别提示:ISP下载接口与JTAG接口封装相同,下载程序时使用ISP接口,不要插到JTAG 接口上4.硬件开发环境的建立本站出售的AVR单片机学习板就是一套完整的硬件环境,它由学习板、电源、并口ISP 下载线等组成。
ATmega128串口通信程序(中断方式)
ATmega128串口通信程序(中断方式)2011-06-05 20:08:10| 分类:单片机程序编写| 标签:|字号大中小订阅程序采用IAR系统编译,实现使用串口调试助手收发数据的功能#include<iom128.h>#include<inavr.h>#include<string.h>#define INT8U unsigned char#define INT16U unsigned int#define UDRIE0 5/* UART Buffer Defines */#define UART0_RX_BUFFER_SIZE 128#define UART0_TX_BUFFER_SIZE 128/* Static Variables */static unsigned char UART0_RxBuf[UART0_RX_BUFFER_SIZE];static volatile unsigned char UART0_RxHead;static volatile unsigned char UART0_RxTail;static unsigned char UART0_TxBuf[UART0_TX_BUFFER_SIZE];static volatile unsigned char UART0_TxHead;static volatile unsigned char UART0_TxTail;static unsigned char UART0_Flag=1;void USART_INIT( void ){UBRR0H = 0x00;UBRR0L = 0x0B;//9600 at 1.8432MUCSR0A = 0x20;UCSR0B = 0xD8;//开接收结束中断,发送结束中断接收使能,发送使能UCSR0C = 0x06;//异步模式,1位停止位,8位数据位UDR0 = 0x00;//清空数据寄存器UART0_RxTail = 0;UART0_RxHead = 0;UART0_TxTail = 0;UART0_TxHead = 0;__disable_interrupt();//关全局中断}void Tran_Byte( INT8U sdata ){if(UART0_Flag == 0){UDR0 = sdata;UART0_Flag = 1;}else{UART0_TxBuf[UART0_TxHead] = sdata;UART0_TxHead++;if(UART0_TxHead >= UART0_TX_BUFFER_SIZE) UART0_TxHead = 0; }__enable_interrupt();}void Send_String( INT8U *string ){INT8U temp;while(1){temp = *string;Tran_Byte(temp);string++;if(*string == 0x00)break;}}INT8U HaveDataRxd( void ){if(UART0_RxHead != UART0_RxTail) return 1;elsereturn 0;}INT8U GetDataFromRxdBuf( void ){INT8U temp;temp = UART0_RxBuf[UART0_RxTail];UART0_RxTail ++ ;if( UART0_RxTail >= UART0_RX_BUFFER_SIZE ) { UART0_RxTail = 0 ;}return temp;}//清空接收缓冲区。
ATmega128L单片机的MicroSD卡读写
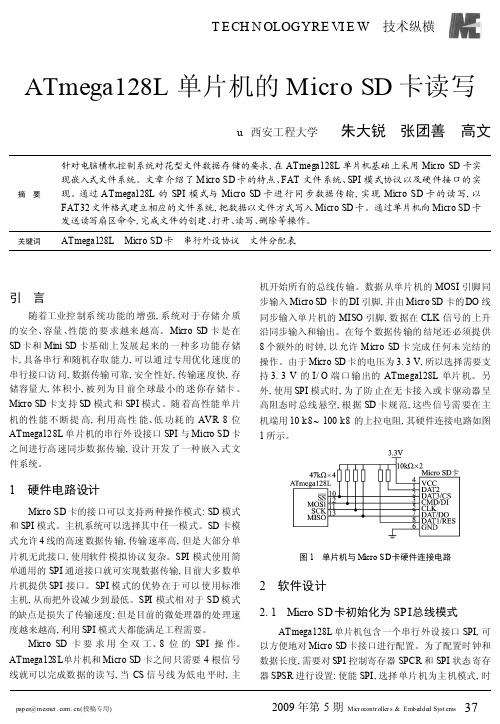
T ECH N OLOGYRE VI E W技术纵横ATmega128L单片机的Micro SD卡读写u西安工程大学朱大锐张团善高文摘要针对电脑横机控制系统对花型文件数据存储的要求,在ATmega128L单片机基础上采用Micro SD卡实现嵌入式文件系统。
文章介绍了Micro SD卡的特点、FAT文件系统、SPI模式协议以及硬件接口的实现。
通过ATmega128L的SPI模式与Micro SD卡进行同步数据传输,实现Micro SD卡的读写,以FAT32文件格式建立相应的文件系统,把数据以文件方式写入Micro SD卡。
通过单片机向Micro SD卡发送读写扇区命令,完成文件的创建、打开、读写、删除等操作。
关键词ATmega128L Micro SD卡串行外设协议文件分配表引言随着工业控制系统功能的增强,系统对于存储介质的安全、容量、性能的要求越来越高。
Micro SD卡是在SD卡和Mini SD卡基础上发展起来的一种多功能存储卡,具备串行和随机存取能力,可以通过专用优化速度的串行接口访问,数据传输可靠,安全性好,传输速度快,存储容量大,体积小,被列为目前全球最小的迷你存储卡。
Micro SD卡支持SD模式和SPI模式。
随着高性能单片机的性能不断提高,利用高性能、低功耗的AVR8位ATmega128L单片机的串行外设接口SPI与Micro SD卡之间进行高速同步数据传输,设计开发了一种嵌入式文件系统。
1硬件电路设计Micro SD卡的接口可以支持两种操作模式:SD模式和SPI模式。
主机系统可以选择其中任一模式。
SD卡模式允许4线的高速数据传输,传输速率高,但是大部分单片机无此接口,使用软件模拟协议复杂。
SPI模式使用简单通用的SPI通道接口就可实现数据传输,目前大多数单片机提供SPI接口。
SPI模式的优势在于可以使用标准主机,从而把外设减少到最低。
SPI模式相对于SD模式的缺点是损失了传输速度;但是目前的微处理器的处理速度越来越高,利用SPI模式大都能满足工程需要。
atmega128实用双串口通讯
}
tx_data[21] =data;
led_2_0();
//----------------数据校验、处理部分
if( (tx_data[0]==0xfe) && (tx_data[21]==0x16) )
{
//--------------------------略 }
} //--------uart 1----RX-----中断方式- 同上---------------------ISR(USART1_RX_vect) {
unsigned char status,data; status=UCSR1A; data=UDR1; unsigned char f; //----status &= ~(FRAMING_ERROR1 | PARITY_ERROR1 | DATA_OVERRUN1); //----f=data;
//---------------------------------------------
#define
led_1_1() (PORTE |= bit(3))//--1
#define #define #define #define #define #define #define #define #define
Atmega128 实用串口通讯程序
1、 双串口异步通讯, USART0——发送使能,接收使能 、2400bps/8 位/偶校验/1 停止位
USART1——发送使能、9600bps/8 位/无校验/1 停止位
2、 外围 5 个 LED 指示 共阳极, PE3~PE7
#include <avr/io.h> #include <util/delay.h> #include <stdio.h> #include <avr/interrupt.h> #include <avr/wdt.h>
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
eg:
UCSR0C=0B00000110 //异步模式,禁止奇偶校验,停止位为 1 位,数据位为 8 位
4、设置 UBRR:
UBRR 的设置和这些参数有关:U2X0,CPU 频率,波特率 当 U2X0 为 0 时,即异步正常模式 异步正常模式下 异步正常模式 ,UBRR 的计算公式: 1、U2X=0 时的公式计算 UBRR0L= (F_CPU/BAUDRATE/16-1)%256; UBRR0H= (F_CPU/BAUDRATE/16-1)/256; 2、U2X=1 时的公式计算
串口的初始化函数: void uart_init(void) //串口 0 初始化 { UCSR0B=0x00; //disable while setting baud rate UCSR0A=0B00000000; //Bit1 为 1 则倍速发送 U2X=0 UCSR0C=0x06; //B00000110 //奇偶模式无,八位数据位,一位停止位 UBRR0L=103; //B00011001 波特率:9600 Bps UBRR0H=0x00; //误差率:0.156% UCSR0B=0x98; } 初始化之后就是对 USART0 进行读写了. UCSR0A 的 Bit5-UDRE0 标志指出发送缓冲器 发送缓冲器 UDR0 是否准备好接收新数据,UDRE0 为 1 说明缓冲器 来产生寄存器空中断.复位后的 UDRE0 置位,表明发送器已经 为空,可以接收新数据,UDRE0 标志也可用来产生寄存器空中断 就绪: 当 UDRE0 为 1 时!(UCSR0A&(1<< UDRE0))为 0 void putchar(uchar c) //串口 0 发送字符 { while(!(UCSR0A&(1<< UDRE0))); //while(!(UCSR0A&32)); 表明发送器已经就绪。 表明发送器已经就绪。 UDR0=c; } 串口 0 发送字符串: void putstr(uchar *s) //串口 0 发送字符串 { while(*s) { putchar(*s); s++; } }
UCSR0C =(1<<UCSZ01)|(1<<UCSZ00); UBRR0L=(fosc/16/(baud+1))%256; UBRR0H=(fosc/16/(baud+1))/256; UCSR0B =(1<<RXEN0)|(1<<TXEN0); }
/*********************************************************************** ***** 函数功能:uart0 发送单字节数据 入口参数:c 出口参数: ************************************************************************ ****/ void putchar0(unsigned char c) { while (!(UCSR0A&(1<<UDRE0)));//表明发送器已经准备就绪 UDR0=c; } /*********************************************************************** ***** 函数功能:uart0 接收单字节数据 入口参数: 出口参数: ************************************************************************ ****/ unsigned char getchar0(void) { while(!(UCSR0A& (1<<RXC0)));//表明已经接收完毕 return UDR0; } /*********************************************************************** ***** 函数功能:uart0 发送字符串数据 入口参数:*s 出口参数: ************************************************************************ ****/ void puts0(char *s) { //将要发BAUDRATE/8-1)%256; UBRRH= (F_CPU/BAUDRATE/8-1)/256; //也可根据数据手册的[波特率设置的例子]查得 //UBRRL = 0x2F; //set baud rate lo //UBRRH = 0x00; //set baud rate hi 设置一般会有误差,误差计算方法为:Error[%]=(BaudRate_ture/BaudRate-1)*100%;
Atmega128 串口详解
Atmega128 有两个串口:USART0 与 USART1 以 USART0 为例 串口的初始化包括: 传输模式的选择:同步还是异步,默认为异步模式,可通过选择 USART 控制和状态寄存器 UCSR0C 中的 UMSEL 位来选择,UMSEL 为 0,是异步模式. 波特率的设置:通信的双方都必须有相同的波特率,波特率可以通过设置波特率发生寄存器 UBRR0 来确 定,UBRR0 为两字节 16 位的寄存器,可分为 UBRR0H 和 UBRR0L.同时起作用的还有 UCSR0A 中的波特 率加倍位 UX2,当 UX2 为 1 时设置的波特率加倍. 传输帧格式的设置:默认是 8 位数据位,一位停止位 发送接受的使能与中断:通过设置 UCSR0B 来根据需要选择接收或发送的使能和是否使用中断,对使用中 断的 USART 操作,初始化前要关闭中断 USART0 的控制和状态寄存器有:UCSR0A,UCSR0B,UCSR0C,波特率寄存器有 UBRR0,即 UBRR0H 和 UBRR0L,数据寄存器为 UDR0
5、然后就是设置 UCSR0B:
Bit7-RXCIE0 为接收结束中断使能,Bit6-TXCIE0 为发送结束中断使能,Bit4-RXEN0 为接收使 能,Bit3-TXEN0 为发送使能.一般情况下,接收使用中断方式,所以使用接收结束中断使能. UCSR0B=0B10011000 //发送接收使能,接收结束使能 还一种写法是 UCSR0B|=(1<< RXEN0)|(1<< TXEN0)|(RXCIE0); 如果更熟练,可以直接以 10 进制活 16 进制来设置这些寄存器: UCSR0B=0x98;或者 UCSR0B=152;
1、初始化:
设置波特率前,要关闭 USART0 的所有使用,包括使能和中断: UCSR0B=0B00000000; //关闭 USART0
2、设置 UCSR0A:
UCSR0A 能写的有 Bit0,Bit1,Bit6,其他 5 位为状态位.我们一般使用的有 Bit1-U2X0,当这一位为 1 时, 波特率的分频因子从 16 降到 8,能够有效的将异步通信模式的传输速率加倍,但是这一位仅对异步操作有影 响,使用同步操作时应将此位清零. UCSR0A=0B00000000; //不使用倍速发送
例程: 串口通信( 串口通信(USART0)
/*********************************************************************** ****/ /*串口 0 测试程序 /*目标器件:ATmega128 /*晶振:RC 8MHZ /*编译环境:ICCAVR 7.13A /*时间:2010 年 3 月 14 日*/ /*E-Mail:number007cool@ ****/ /*********************************包含头文件 ********************************/ #include<iom128v.h> #include<macros.h> /***********************************宏定义 **********************************/ #define fosc 8000000 //晶振 8MHZ #define baud 2400 //波特率 /*********************************************************************** ***** 函数功能:uart0 初始化程序 入口参数: 出口参数: ************************************************************************ ****/ */ */ */ */ */
/***********************************************************************
void uart0_init(void) { UCSR0B = 0x00; UCSR0A = 0x00; //关闭 UART00 //不使用倍速发送(异步) //数据位为 8 位 //异步正常情况下的计算公式 //接收使能和发送使能
串口通信( 串口通信(USART1) /*********************************************************************** ****/ /*串口 1 测试程序 /*目标器件:ATmega128 /*晶振:RC 8MHZ /*编译环境:ICCAVR 7.13 /*E-Mail:number007cool@ /*时间:2010 年 1 月 14 日 */ */ */ */ */ */
while (*s) { putchar0(*s); s++; } putchar0(0x0a);//回车换行 //putchar0(0x0d); } /*********************************************************************** ***** 函数功能:主程序 入口参数: 出口参数: ************************************************************************ ****/ void main(void) { unsigned char i; uart0_init();//UART0 初始化 puts0("HELLO!"); while(1) { puts0("test ok!"); } }