信息光学第三章
信息光学教案第三章

§ 2. 相干照明衍射受限系统的点扩散函数 考虑到观察光强,并利用放大率
1 h( xo , yo ; xi , yi ) 2 λ d o y ) exp{
j 2π [( xi Mx 0 ) x ( yi My o ) y ]} dxdy λd i
2 2 xo yo x i2 yi2 1 2 exp[ jk ] exp[ jk ] λ d od i 2d o 2d i
x y dU'1 ( xo , yo ; x , y ) p( x , y ) exp( jk )dU1 ( xo , yo ; x , y ) 2f
exp( jkd i ) ( xi xo )2 ( yi yo )2 h( xo , yo ; x , y ) dU'1 ( xo , yo ; x i , yi ) exp[ jk ] dxxy jλd i 2d i
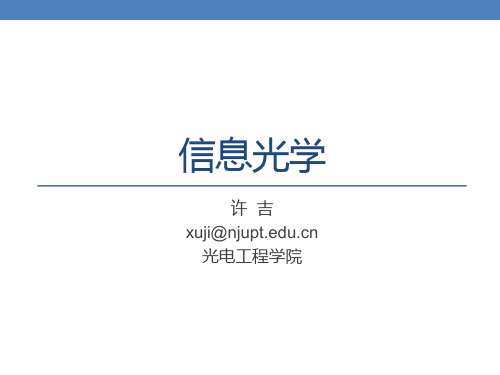
§ 1. 评定光学成像系统的主要方法 a.星点法 用点光源经过光学成像系统所产生的像斑特 征来评定。
§ 1. 评定光学成像系统的主要方法 a.星点法 用点光源经过光学成像系统所产生的像斑特 征来评定。 定性评定、主观因素很大
§ 1. 评定光学成像系统的主要方法 a.星点法 用点光源经过光学成像系统所产生的像斑特 征来评定。 定性评定、主观因素很大 b.分辨率法
§ 1. 评定光学成像系统的主要方法 a.星点法 用点光源经过光学成像系统所产生的像斑特 征来评定。 定性评定、主观因素很大 b.分辨率法 用系统能分辨出景物最小尺寸的能力来评定 从定性到定量、信息量较小、 不能全面评价、主观因素较大 c.光学传递函数法
§ 1. 评定光学成像系统的主要方法 a.星点法 用点光源经过光学成像系统所产生的像斑特 征来评定。 定性评定、主观因素很大 b.分辨率法 用系统能分辨出景物最小尺寸的能力来评定 从定性到定量、信息量较小、 不能全面评价、主观因素较大 c.光学传递函数法 从空域到频域,通过研究光学系统的频域特 性来评价光学系统像质
信息光学第03章
输入是指施加于系统的作用,称为系统的输入激励(excitation);输出是要求系统完成的功能,称为系统的 输出响应(response)。可见,系统的特性决定对某一输入激励会产生什么样的输出响应。当研究一个系统的 性质时,不必过多地关心系统内部的结构,只需知道其输入端和输出端的性质就行了。 分析一个系统,首先要对系统建立数学模型,然后运用数学方法进行求解,最后又回到系统,对结果 做出物理解释,并赋予其物理意义。所谓系统的模型是指系统物理特性的抽象,以数学表达式或具有物理 特性的符号图形来表征系统特性。系统的分类比较复杂,从数学模型的差异来看,可划分为: (1) 连续系统和离散系统:输入和输出均为连续信号的系统称为连续系统,输入和输出均为离散信号 的系统称为离散系统。 (2) 线性系统和非线性系统:线性系统是指具有线性特性的系统。所谓线性(linearity) 特性是指齐次性 与叠加性。若系统输入增加 k 倍,输出也增加 k 倍,这就是齐次性(homogeneity)。若有几个输入同时作用 于系统,而系统总的输出等于每一个单独作用所引起的输出之和,这就是叠加性(superposition property)。 系统同时具有齐次性和叠加性便呈现线性特性。一般线性系统性必须具有以下特性:① 分解性 (decomposition);② 零输入线性;③ 零状态线性。凡不具备上述特性的系统则为非线性系统。 (3) 空间不变系统和空间变系统:只要初始状态不变,系统的输出仅取决于输入而与输入的起始作用 点无关,这种特性称为空间不变性。具有空间不变特性的系统为空间不变系统(space invariant system),不 具有空不变特性的系统为空间变系统(space varying system)。 (4) 因果系统和非因果系统:因果系统(causal system)是指其响应不会超前激励的系统,非因果系统 (noncausal system) 是指响应能领先于激励的系统,它的输出取决于输入的将来值。 为了用简洁的语言来分析物理系统,最常用的方法是寻找一个数学模型,使其在数学意义上能恰当地 描述该系统的性质和状态。在傅里叶光学中,常常采用一种算符把光学系统的激励与对此产生的响应联系 起来,系统的作用就是完成数学上的某种变换或运算。如图 3.1.1 所示,算符 L{} 表示系统的作用,激励 函数 f ( x, y ) 通过系统后变成相应的响应函数 g ( x, y ) ,两函数之间满足下列关系:
信息光学_第三章
P1
P2
s o1 o2
s’
p
q
U1(x,y) t(x,y) U1‘(x,y)
U
'
1
(
x,
y)
U1
(
x,
y)t
(
x,
y)
透镜的复振幅透过率为:
t(x, y) U1' (x, y) U1(x, y)
在傍轴近似下,单色点光源S发出的发散
球面光波在P1平面上造成的光场分布为
U1(x,
y)
Aexp(
jkp)
➢ 孔径光栏、入瞳、出瞳由系统元件参数及相对位置决定。 ➢ 对整个光学系统而言,入瞳和出瞳保持物像共轭关系。由入瞳限 制的物方光束必定能全部通过系统,成为被出瞳所限制的像方光束
2)“黑箱”模型
系统成像分三部分:
1、物平面到光入瞳平面2、入 瞳平面到出瞳平面3、出瞳平
面到像平面
➢ 在第1、3部分:光波传播可按菲涅耳衍射处理 ➢ 在第2部分,在等晕条件下,可把它当作一个黑箱来处理,黑 箱两端分别是入瞳和出瞳,只要能够确定黑箱两个边端的性质,
y0 ;
x,
y)
P(x,
y) exp
jk
x2 2f
y2
dUl
( x0 ,
y0 ;
x,
y)
透镜后表面xi,yi平面: 再次运用菲涅耳衍射公式:
h(x0
,
y0 ;
xi
,
yi
)
exp( jkdi
jdi
)
dUl(x0
,
y0
;
x,
y)
exp
jk
(xi
x)2 ( 2di
信息光学导论第三章

线性系统概论◆引言在信息光学系统中光学装置被看成收集、传递或变换信息的系统。
一个光学系统的理想成像,就是将无空间的物体信息传递、变换物空间,在像面上形成不变的物体的像。
这样的理想光学系统显然是一线性系统。
虽然实际光学成像系统由于不可避免的存在相差,总会产生失真,是非线性的,但在把研究的问题看成线性的而不会引起明显误差,或只在某个小范围满足现行性质时,就可以将其当作现行未提来处理。
所以线性系统理论与傅立叶分析方法一样,是研究信息光学中成像系统和信息处理系统的重要理论基础。
本章主要介绍线性系统特别是空间不变线性系统的定义、特点和分析方法。
3.1线性系统的基本概念◆系统及其分类所谓系统,是指一组相互关联的事物构成的总体。
这样的系统可分为物理系统和非物理系统。
这里仅讨论物理系统。
如图所示一个物理系统,它是这样的装置,当对其作用一个激励时,他就产生一个响应。
从数学上着眼,很多现象都可抽象为使函数)(x f 通过一定的变换,形成)(x g 函数的运算过程.这种实现函数变换的运算过程称为系统.这种意义下的系统,既可以是特定功能的 元器件组合,例如电子线路、光学透镜组等,也可以是与实际元件无关的物理现象,如光学系统,通讯系统,管理系统和指挥系统等。
系统论的引入,使得我们在研究一个光学系统时,所关心的是系统对于给定的激励产生什么样的响应,而不去考虑系统内部的具体结构和具体工作原理。
线性系统理论是从总体上研究系统输入输出之间的对应关系和他们的共同特性。
◆线性系统的定义及其算符表示假设一个激励)(1x f 作用于某系统产生的响应为)(1x g ,而激励)(2x f 作用于某系统产生的响应为)(2x g ,用符号表示为)()(),()(2211x g x f x g x f →→如果系统满足可加性)()()()(2121x g x g x f x f +=+和奇次性(均匀性))()(),()(22221111x g c x f c x g c x f c →→则这样的系统为线性系统。
信息光学3
u( P , t ) Rea( P )exp( j[2 t ( P )]) Re a( P )e j ( P ) e j 2 t
空间位置
Define:
时间频率
初相位
时间
j ( P ) U ( P ) a ( P )e 复振幅
光振动的空间分布完全由复振幅随空间位置的变化确定 光强: I
对于线性不变系统
在空域中通过输入函数与脉冲响应函数的卷积求得输出函数。 在空间频域求输入函数与脉冲响应函数两者各自频谱密度的乘积,再对该 乘积取逆傅里叶变换球的输出函数。
线性系统分析
19
线性不变系统的传递函数
对系统做频谱分析——考察系统对输入函数中不同频率的基元函数的作用。
G( , ) H ( , ) F ( , )
{a1 f1 (x1, y1) + a2 f2 (x1, y1) }
= a1 g1
(x2, y2) + a2 g2 (x2, y2)
9
线性系统分析
从数学上着眼,很多现象都可以抽象为使函数 f 通过一定的变换,形成函 数 g 的运算过程。这种实现函数变换的运算过程称为系统。既可以是特能功 能的元件组合,也可以是与实际元件无关的物理现象。
R fg ( x) f ( x)★g ( x)
与卷积的关系:
f *( ) g ( x )d
f *( - x) g ( ) d g ( x)* f *(- x) R fg ( x)
2. 自相关 auto-correlation
R ff ( x) f ( x)★f ( x)
f ( x , y ) h( x , y )
线性系统分析
信息光学课件第三章
相干系统的点扩散函数 可看成是复振幅透过率 的光瞳被 半径为di的球面波照明后所得的分布。 称广义光瞳。 就是广义光瞳 的傅里叶变换。
相干传递函数定义为相干点扩散函数的傅里叶变换
由
得
(无像差)
有像差系统的通频带没有变化,截止频率也没有变化,但在通频 带内引入了与频率有关的位相畸变,使像质变坏。 非相干光照明下强度点扩散函数仍然是相干点扩散函数模的平方 但峰值减小。 Strehl Ratio
的频谱函数(相干传递函数)H(ξ ,η )
描述系统的变换特性更为方便。
3.3.1相干传递函数
相干成像系统的物像卷积关系
是几何关系理想像的复振幅分布。ĥ是系统的脉冲响应。 从频域上看,对上式进行傅里叶变换,可得到系统对各种频率成 分的传递特性。
系统的输入频谱 输出频谱 相干传递函数 CTF
已知
说明相干传递函数等于光瞳函数,只是将空域坐标变换为频域坐标 (-λ diξ ,-λ diη ),通常光瞳都具有中心对称性,正负号无关紧要, 忽略负号后取
因hI是实函数,H是厄密型的,即
因此模是偶函数
辐角是奇函数
3.6相干与非相干成像系统的比较
各有优缺点。 3.6.1截止频率 OTF 的截止频率是CTF的2倍。但是 OTF是随空间频率增大而降低的。而CTF 是在空间频率小于某值前均为1,大于某 值时突变为0。
相干传递函数
3.6.2像强度的频谱
利用卷积定理和自相关定理得到像强度频谱
D为出瞳直径。
相干照明时,两点源产生的艾利斑按复振幅叠加。因而各点的 相位关系对强度分辨影响很大。
Φ =0,两点源位相相同,I(x)没有凹陷两点完全不能分辨。 Φ =π /2 与非相干光完全相同。 Φ =π 时,两点源位相相反。 两点源能否分辨与点源位相有关。
信息光学原理第3章
1
焦面场是透镜前端场的傅里叶变换(空间频谱)。 如上图所示,距离透镜前端有一物体,其透过率为t(x0,y0)。若用振幅为A 的平面波垂直照明物体,则物体的透射光场为:
U0 x0 , y0 A t x0 , y0
根据角谱理论,透镜前端场的角谱为:
F U1 x, y F U 0 x0 , y0 H f x , f y
U l x, y U x, y
在傍轴近似下,忽略透镜对光波振幅的影响,紧靠透镜前后的平面上产生的 复振幅分布为
k U l x, y A exp jkd 0 exp j x 2 y 2 2d 0
k U l x, y A exp jkd i exp j x 2 y 2 2d i
x 1
2
y2 R12
x 1
x2 y 2 1 2 R2 2 2 x y 2 x, y 02 R2 R2 2 x 2 y 2 02 R2 1 1 2 仅考虑傍轴光 R2
f
f
f
j f
2f
2
2
f
f
k 2 U 2 x, y exp j x 2 y 2 exp j xx f yy f dxdy 2f f
?
3.2 透镜的傅里叶变换性质
后焦面上的场分布为
3.1 透镜的位相调制作用
则透镜复振幅透过率表示为:
k A exp jkdi exp j x 2 y 2 U x, y 2d i tl x, y l U l x, y k 2 2 A exp jkd 0 exp j x y 2d 0
信息光学教程李俊昌第三章
然而 , 上面对连续函数被无穷δ 序列取样离散后的频谱研究只是一个理论结果 , 因为实际
频域均是周期离散函数的傅里叶变换问题 , 还要将 离 散 函 数 截 断 及 延 拓 才 能 满 足 要 求 . 因 此,
r x)= L x(
( ) ] 得到具有 Nx 个点的离散分布 [ 图3 1 2 e 1
{
是, 对于实际给定的衍射问题 , 能够直接从傅里叶变 换 求 出 解 析 表 达 式 的 函 数 非 常 有 限 , 在研 究实际问题时 , 不得不将函数按一定规律在二维空间进行取样及延拓 , 变成该函数的周期离散 分布作离散傅里叶变换 . 然而 , 离散傅里叶变换的计算仍然十分繁杂 , 如果没有计算机 , 事实上
由图可见 , 由于矩形窗函数的 频 谱 RL (f 卷积运算的结 x ) 具 有 较 大 的 起 伏 变 化 的 旁 瓣, x
( ) ] 函数 [ 图3 1 2 1 . g 空域及频域离散函数均以 Nx 为周期 , 我们只要分别知道一个周期内的离散值或样本点便
菲涅耳衍射积分可以表示为傅里叶变换及卷积两种形 式 , 存在一次快速傅里叶变换及快速卷
㊃4 8㊃
信息光学教程
上不可能作取样点为无限多的数值计算 . 并且 , 由于离散傅里叶变换事实上讨论的是在空域及 ( ) ] ( ) ] 将空域非周期的离散函数 [ 图3 先通过下述矩形窗函数 [ 图3 截断 : 1 2 c 1 1 2 d 1 / 1, -Tx/ 2< x < L 2 x -T x 0
n=- ∞
∞
( 由于梳状函数δ 可以表示为傅里叶级数 x)为周期 Tx 的δ 函数 , T x ( δ x)= T x 式中 , j=
( ) 3 1 1
Ak = -1 ,
信息光学(傅里叶光学)Chap3-1
x
, f y ) exp[ j 2p ( f x x f y y )]df x df y
即: 把U(x,y)看作频率不同的复指数分量的线性组合, 各分 量的权重因子是A(fx, fy).
A( f x , f y ) U ( x, y ) exp[ j 2p ( f x x f y y )]dxdy
fx
X
l
;
fy
Y
s单色平面波 在xy 平面的复振幅分布可以表示为
U ( x, y ) A exp[ j 2p ( f x x f y y )]
#
光波的数学描述
平面波的空间频率-信息光学中最基本的概念
练习 1
单位振幅的单色平面波, 波矢量k与x轴夹 角为30, 与y轴夹角为60. (1)画出z = z1平面上间隔为2p的等相线族, 并求出Tx、 Ty、T 和fx 、fy和 f。 (2)画出y = y1平面上间隔为2p的等相线族, 并求出Tx、 Tz 和fx 、fz.
§3-1 光波的数学描述
单色光波场的复振幅表示
将光场用复数表示,有利于简化运算
u(P,t) = a(P)cos[2pnt - j(P)]} = e{a(P)e-j[2pnt -j(P)] }
复数表示有利于 = e{a(P) e jj(P). e -j2pnt } 将时空变量分开
光场随时间的变化e -j2pnt不重要: n ~1014Hz, 无法探测 n为常数,线性运算后亦不变 对于携带信息的光波, 感兴趣的是其空间变化部分. 故引入复振幅U(P):
l
l
l
l
cosa cos b 称为xy平面上复振幅分布的 A( , )
l
信息光学 第三章 苏显渝版 PPT作者窦柳明概要
jk 1 1 1 2 2 P ( x , y )exp x y 2 d0 di f
1 1 1 d0 di f
x0 x i y0 yi exp jk x y dxdy d0 di d 0 d i
程中的丢失、衰减、相移的变化,即研究成像系统的空间频率 传递特性——传递函数,从而做到对系统全面、定量的评价。
第三章 光学成像系统的传递函数
即可以由传递函数全面定量地对系统进行评价。 系统的传递函数可由两种方法获得: (1)由系统的设计数据(材料参数、结构参数等)计算出来: ——叫做传递函数的计算。 (2) 由检测仪器进行测定: ——叫传递函数的测定。
已知物面分布 成像系统 像面分布(复振幅分布和光强分布) 相干叠加(相干光照明) 非相干叠加,即强度叠加 (非相干光照的) 点扩散函数(脉冲响应)
关键是:求点物的像 场分布——点扩散 函数(脉冲响应)
δ( x x0 , y y0 ) 成像系统
小面元组合 (加权函数)
h( x0 , y0 ; xi , yi )
d0
di
3.1 相干照明衍射受限系统的点扩散函数
U 0 ( x 0 , y0 ) ( x 0 , y0 )
Ul U l
U i ( x i , yi ) ( xi , yi )
( x, y )
0 , y0 ) (x
, y0 ) ( x0 2) 求 dUl ,
d0
di
dU l ( x , y; x 0 , y0 )
2 2 x x 2 y y x x y y exp( jkd0 ) 0 0 0 0 0 , y0 ) exp jk dU l ( x, y; x0 x x , y y exp jk 0 0 0 0 2d 0 j d 0 2d0 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
透镜的一般变换性质
e U ( x, y ) e j d1d 2
jk ( d1 d 2 ) j k d (1 1 )( x 2 y 2 ) 2d1d 2 f
U 0 ( x0 , y0 )e
e
jk ( d1 d 2 )
j
k d [(1 2 )( x0 2 y0 2 )2( x0 x y0 y )] 2d1d 2 f
(3.42)
理想成像条件下: ~ xo ~ y 1 U g ( xi , yi ) 2 U o ( , o ) K2 d i2 ( xi ~ xo , yi ~ yo )d~ xo d~ yo M M M 2 2 ~ K2 d i2 xo ~ yo K di xi yi ~ ~ ~ ~ U o ( , ) ( xi xo , yi yo )dxo dyo Uo ( , ) 2 2 M M M M M M 将(3.43)代入(3.42):
(1)当 d 2 f,即后焦面为观察平面
U ( x, y) jf e
j k d (1 1 )( x 2 y 2 ) 2f f
其中:
1 1 1 d1 d 2 f
j
dx0 dy0
U 0 ( x0 , y0 )e
j 2 ( x x y0 y ) f 0
(3.35)
2 d o di
P( x, y) exp{ j
2 [(xi ~ xo ) x ( yi ~ yo ) y ]}dxdy d i
h( xi ~ xo , yi ~ yo )
1 2 do di
P( x, y) exp{ j
2 [( xi ~ xo ) x ( yi ~ yo ) y]}dxdy di
h( xi ~ xo , yi ~ yo ) K2 di 2 P(di ~ x , d i ~ y ) exp{ j 2 [( xi ~ xo ) ~ x ( yi ~ yo ) ~ y ]}d~ x d~ y
(3-4-10)
若光瞳足够大:
h( xi ~ xo , yi ~ yo ) K2di 2 ( xi ~ xo , yi ~ yo )
(43)
~ xo U i ( xi , yi ) U ( 2 2 g M K di 1
~ yo , )h( xi ~ xo , yi ~ yo )d~ xo d~ yo M
令:
~ h ( xi ~ xo , yi ~ yo )
1 K2 d i2
2 2 2 2
2
2
2
2
(3.31)、(3-4-1)
x yo x yi 1 h( xo , yo ; xi , yi ) 2 exp[ jk o ] exp[ jk i ] do di 2d o 2d i
P( x, y) exp{ jk[(
xi xo y y ) x ( i o ) y ]}dxdy di do di do
透镜的傅立叶变换性质
物在透镜前 (1)
A0e
( x0 2 y0 2 ) jk 2( p d 0 ) ( x0 2 y0 2 ) jk 2( p d 0 )
(2)
A0t ( x0 , y0 )e
A0 (3) U l ( x' , y' ) jd 0
t ( x0 , y0 )e
1 U ( x, y) U l ( x' , y' )e jq
x '2 y ' 2 jk 2f
e
( x x ') 2 ( y y ') 2 jk 2q
dx' dy'
透镜的傅立叶变换性质
物在透镜前
U ( x, y ) c ' e
( f d 0 )( x 2 y 2 ) jk 2[ q ( f d 0 ) fd 0 ] f ( x0 x y0 y ) jk q ( f d 0 ) fd 0
h( xi ~ xo , yi ~ yo )
(3.44)
则:
~ ~ ~ U i ( xi , yi ) U g (xo , yo )h ( xi ~ xo , yi ~ yo )d~ xo d~ yo
( x xo ) 2 ( y yo ) 2 1 dU1 ( xo , yo ; x, y) exp[ jk ] jdo 2do
x2 y2 dU '1 ( xo , yo ; x, y) P( x, y) exp( jk )dU1 ( xo , yo ; x, y) 2f
2 2
(3.32)、(3-4-2)
k k xi yi 2 2 exp[ j ( xo yo )] exp[ j ( )] 2do 2do M2
(3.33)、(3-4-3)
h( xo , yo ; xi , yi )
1
d o di
1
2
h( xo , yo ; xi , yi )
( x2 y 2 ) jk 2q
t ( x0 , y0 )e
jk
( x0 x y0 y ) q
dx0 dy 0
透镜的傅立叶变换性质
物在透镜后
U ( x, y ) c ' e
( x2 y 2 ) jk 2[(q d 0 )] ( x0 x y0 y ) jk q d0
(3-4-11)
三、相干照明下衍射受限系统的成像规律
U i ( xi , yi ) U o (xo , yo )h( xi ~ xo , yi ~ yo )dxo dyo
1 2 M
~ xo U o ( M
~ yo , )h( xi ~ xo , yi ~ yo )d~ xo d~ yo M
(3.38) (3-4-8)
二、衍射受限系统的点扩散函数(脉冲响应)
2 h( xo , yo ; xi , yi ) K P( x, y)exp{ j [( xi Mxo ) x ( yi Myo ) y]}dxdy di
变量变换:
(3-4-9)
则:
x ~ y ~ ~ ~ xo Mxo , yo Myo ; x ,y d i d i
(3.36)
x ~ y ~ x ,y d i d i
h( xi ~ xo , yi ~ yo ) | M |
P(di x , di y ) exp{ j 2 [( xi xo ) x ( yi yo ) y ]}dx dy
~
~
~ ~
~ ~
~ ~
第三章 光学成像系统的频率特性
利用光学传递函数评价光学系统 传递光学信息的能力和成像质量
Chap.3 光学成像系统的频率特性
一、透镜的位相变换作用 二、透镜的傅立叶变换性质 1 物在透镜前;2物在透镜后方;3 透镜的孔径效应 三、透镜的一般变换特性 四、相干照明衍射受限系统的成像分析 1 透镜的点扩散函数(脉冲相应) 2 衍射受限系统的点扩散函数 3相干照明衍射受限系统的成像规律 五、衍射受限系统的相干传递函数(CTF) 六、衍射受限系统的非相干传递函数(OTF) 七、有像差系统的传递函数 八、相干与非相干成像系统的比较
t ( x0 , y0 )e
dx0 dy 0
特例:物紧贴透镜 d0 0
U ( x, y ) c ' e
( x2 y 2 ) jk 2q
t ( x0 , y0 )e
jk
( x0 x y0 y ) q
dx0 dy 0
总之,只要观察面是照明光源的共轭面,则 物面(输入面)和观察面(输出面)之间 的关系都是傅里叶变换关系。
t ( x0 , y0 )e
dx0 dy 0
特例: (1)输入面位于前焦面 d0 f
U ( x, y) c' t ( x0 , y0 )e
( x0 x y0 y ) jk f
dx0 dy0
(2)输入面紧贴透镜 d0 0
U ( x, y ) c ' e
exp( jkdi ) ( xi x) 2 ( yi y) 2 h( xo , yo ; xi , yi ) dU '1 (xo , yo ; x, y) exp[ jk dxdy jdi 2di
x yi x yo 1 h( xo , yo ; xi , yi ) 2 exp[ jk i ] exp[ jk o ] do di 2d i 2d o k 1 1 1 2 2 P ( x , y ) exp[ j ( )( x y )] 2 di do f exp{ jk[( xi xo y y ) x ( i o ) y ]}dxdy di do di do
(3.37)
h( xi ~ xo , yi ~ yo ) | M | exp{ j 2 [( xi ~ xo ) ~ x ( yi ~ yo ) ~ y ]}d~ x d~ y | M | ( xi ~ xo , yi ~ yo )
(3.38)
(3-4-4)--(3-4-8)
U ( x, y ) e
jk ( d1 d 2 )
M
e
j ( x2 y 2 ) Mf
x y U0 ( , ) M M